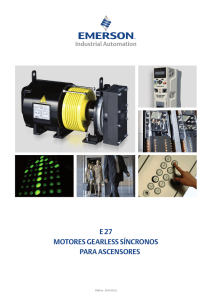
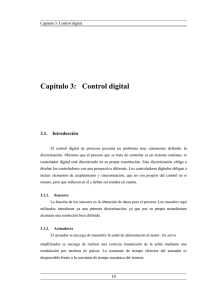
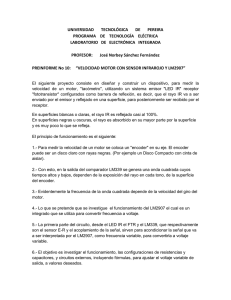
Unidrive SP para elevación
Anuncio

Guía de Configuración Unidrive SP para Elevación Versión: 2.00 Guia de Configuración Driver: UNIDRIVE SP Versión Software SM-Application Lite: v1.0.4 – 10624f Función: Guía de Configuración Unidrive SP para Elevación Máquina asíncrona y síncrona (gearless) Variante: Menu F 1 Guía de Configuración Unidrive SP para Elevación UTILIZACIÓN DE ESTA GUÍA DE CONFIGURACIÓN Información de Seguridad ........................................................................................................................................................ 3 1.-Instalación Mecánica 1.1.-Identificación................................................................................................................................................................ 4 2.-Configuración de parámetros 2.1.-Manejo del Display ...................................................................................................................................................... 5 2.2.-Menú-F en SM-Keypad Plus........................................................................................................................................ 5 2.3.-Estructura Menú-F........................................................................................................................................................ 6 3.- Configuración Unidrive SP 3.1.-Función de Auto Configuración ................................................................................................................................... 7 3.2.-Programación por Smart Card ...................................................................................................................................... 7 3.3.-Cambio del Tipo de Motor ........................................................................................................................................... 8 3.4.-Configuración del Encoder........................................................................................................................................... 8 3.5.-Configuración Datos de Motor..................................................................................................................................... 9 3.6.-Autoajuste .................................................................................................................................................................... 9 3.6.1.-Motor de Inducción con Encoder ......................................................................................................................... 9 3.6.2.-Servomotor con Encoder de Realimentación........................................................................................................ 9 3.7.-Parámetros de Instalación........................................................................................................................................... 10 3.8.-Configuración de Velocidades ................................................................................................................................... 10 3.9.-Configuración de Tiempos de Freno .......................................................................................................................... 11 3.10.-Filtro de Corriente .................................................................................................................................................... 11 3.11.-Lazo de Corriente ..................................................................................................................................................... 12 3.12.-Lazo de Velocidad.................................................................................................................................................... 12 3.13.-Lazo de Posición ...................................................................................................................................................... 12 4.-Primer Test y Selección de Dirección 4.1.-Comprobar el Conexionado del Equipo y Maniobra de Control ................................................................................ 13 4.2.-Pasos a Realizar para la Puesta en Marcha................................................................................................................. 14 4.2.1.-Ajuste de las Ganancias del Lazo de Velocidad ................................................................................................. 14 4.3.-Optimización .............................................................................................................................................................. 17 4.3.1.-Liberación de Freno............................................................................................................................................ 17 4.3.2.-Arranque Suave .................................................................................................................................................. 17 4.3.3.-Aceleración......................................................................................................................................................... 18 4.3.4.-Velocidad Constante........................................................................................................................................... 18 4.3.5.-Deceleración....................................................................................................................................................... 18 4.3.6.-Aproximación / Parada ....................................................................................................................................... 18 4.3.7.-Guardar Configuración....................................................................................................................................... 18 4.3.8.-Grabar Configuración en la Smart Card ............................................................................................................. 18 5.-Diagnóstico 5.1.Códigos de Fallo y Acciones Correctivas.................................................................................................................... 19 6.-Recomendaciones para Conexionado Encoder 6.1.-Encoder ...................................................................................................................................................................... 22 6.2.-SinCos Encoder .......................................................................................................................................................... 22 7.-Parámetros Estándar para Máquina Síncrona / GEARLESS (SV)..................................................................................... 23 8.-Parámetros Estándar para Máquina Asíncrona con Encoder (CL)..................................................................................... 24 9.-Parámetros Fijos Estándar del Variador............................................................................................................................. 25 10.-Configuración Estándar Encoder ..................................................................................................................................... 25 11.-Referencia de Documentos .............................................................................................................................................. 26 2 Guía de Configuración Unidrive SP para Elevación Información de Seguridad La información de seguridad y la guia del menu F deben ser leídos y aplicados cuidadosamente Competencia del instalador Sólo los montadores profesionales que estén familiarizados con los requisitos de seguridad y de CEM deben instalar este accionamiento. El montador es responsable de asegurar que el sistema o producto final cumple lo estipulado en todas las leyes pertinentes del país donde se va a utilizar. La impedancia del circuito a tierra debe cumplir los requisitos de las normas de seguridad locales. El accionamiento debe ponerse a tierra mediante una conexión capaz de conducir la corriente de pérdida prevista hasta que el dispositivo de protección (fusible u otro) desconecte la alimentación de CA. Las conexiones a tierra se deben inspeccionar y comprobar con la regularidad necesaria. Fusibles La alimentación de CA del accionamiento debe estar provista de una protección contra sobrecargas y cortocircuitos adecuada. La Guía del usuario del Unidrive SP incluye los valores nominales recomendados de los fusibles. Si no se siguen fielmente estas recomendaciones, puede producirse un incendio. Carga almacenada El accionamiento contiene condensadores que permanecen cargados con una tensión potencialmente letal después de haber desconectado la alimentación de CA. Si el accionamiento ha estado conectado a la corriente, la alimentación de CA debe aislarse al menos diez minutos antes de poder continuar con el trabajo. Normalmente, una resistencia interna descarga los condensadores. Sin embargo, ante fallos concretos que ocurren raramente, es posible que los condensadores no se descarguen o que se impida la descarga mediante la aplicación de tensión a los terminales de salida. Si la avería hace que la pantalla del accionamiento se quede inmediatamente apagada, lo más probable es que los condensadores no se descarguen. En este caso, póngase en contacto con Control Techniques o con un distribuidor autorizado. Dispositivo de aislamiento Antes de quitar alguna tapa del accionamiento o de realizar tareas de reparación, es preciso desconectar la alimentación de CA del accionamiento utilizando un dispositivo de aislamiento aprobado. Peligro de descarga eléctrica Las tensiones presentes en las siguientes ubicaciones pueden provocar una descarga eléctrica grave que puede resultar mortal: • Conexiones y cables de alimentación de CA • Conexiones y cables de CC y frenado • Conexiones y cables de salida • Numerosas partes internas del accionamiento y las unidades externas opcionales A menos que se indique lo contrario, los terminales de control disponen de aislamiento simple y no deben tocarse. No cambie valores de parámetros sin haberlo considerado detenidamente, ya que los valores incorrectos pueden causar daños o representar un riesgo para la seguridad. Antes de cambiar parámetros consulte la guía Unidrive SP User Guide o la Unidrive SP Advanced User Guide. Por motivos de seguridad, es necesario montar un interruptor automático o un disyuntor en el cable que une el accionamiento y el. Por motivos de seguridad, uno de los tipos de contactores de motor que se recomiendan para la instalación entre el accionamiento y el motor es el AC3. El cierre o la apertura del contactor con el accionamiento activado dará lugar a lo siguiente: 1. Desconexiones OI.AC (que no permiten el reinicio en 10 segundos) 2. Alto nivel de emisiones de ruido de radiofrecuencia 3. Mayor desgaste y deterioro del contactor Protección contra sobrecargas Cuando se utiliza una resistencia de frenado externa, es indispensable incorporar un dispositivo de protección contra sobrecargas en el circuito de la resistencia, como se describe en la Guía del usuario del Unidrive SP. El tipo B ELCB / RCD es el único adecuado para utilizarse con accionamientos inversores trifásicos. La corriente de fuga es elevada cuando el filtro interno se encuentra instalado. En ese caso es necesario realizar una conexión a tierra fija permanente o tomar las medidas adecuadas para no comprometer la seguridad si se interrumpe la conexión. Con filtro interno instalado: CA 28 mA a 400 V, 50 Hz (proporcional a tensión y frecuencia de alimentación) 30 µA CC (10 MΩ) Con filtro interno desinstalado: <1 mA No cambie valores de parámetros sin haberlo considerado detenidamente, ya que los valores incorrectos pueden causar daños o representar un riesgo para la seguridad. El parámetro Pr 0.46 Intensidad nominal del motor debe ajustarse correctamente para evitar el riesgo de incendio en caso de sobrecarga del motor. 3 Guía de Configuración Unidrive SP para Elevación Utilización de esta guía de configuración Esta guía de configuración debería ser utilizada para la configuración del Unidrive SP para Elevación con la opción del Menú-F. Únicamente describe como poner en marcha un Unidrive SP para Elevación mediante el Menu-F y no la completa funcionalidad del Software de ascensores del Unidrive SP. El Unidrive SP para Elevación se compone de un variador Unidrive SP y del Software de Elevación incluído en el módulo SM_Application_Lite (SM_ELV). 1.-Instalacion Mecánica El módulo SM_Application queda colocado en el slot 3 del variador. El Keypad Plus se coloca sobre el equipo o bien remotamente mediante cable de comunicaciones. El Menu-F consiste en un menú de configuración de acceso rápido programado en la SM-Keypad Plus. Después de dar tensión al variador podemos acceder directamente al Menu-F de la SM-Keypad Plus. 1.1.-Identificación La siguiente etiqueta se aplica al Módulo de SM-Applications Lite, después de que la aplicación de ascensores haya sido cargada previamente. El módulo seguidamente se etiqueta de la siguiente manera: Lift Soft v1.0.4 – 10624f · Un número de configuraciones son necesarias para poder utilizar este software. Para simplificar el ajuste, se ha añadido una función adicional para proveer una configuración inicial en el arranque de variador. 4 Guía de Configuración Unidrive SP para Elevación 2.-Configuración de parámetros Hay muchas posibilidades de configuración de parámetros. Para configurar los parámetros directamente en el Drive de elevación hay dos tipos de diplays disponibles. La SM-Keypad con display de leds y la SM-Keypad Plus, un Keypad con un LCD alfanumérico con función de ayuda. Ambos displays pueden ser insertados o quitados con tensión en el drive. Sólo el SM-Keypad Plus tiene posibilidad de conexión remota vía comunicaciones serie. El Menú-F únicamente se encuentra disponible en la SM-Keypad Plus. 2.1.-Manejo del Display Los parámetros del Unidrive SP van desde el Menú 0 al 22, en cada menú hay hasta 51 parametros. El parámetro mm.nn consiste en el número de menú mm y el número de parámetro nn. Tecla Función en modo display Función en modo edición (Display Estático) (Número parpadeando) Estado del Drive -- : -M Cambiar a modo Edición Cambiar a Modo Display ▲ Incrementar número de parámetro Incrementar valor de parámetro ▼ Decrementar número de parámetro Decrementar valor de parámetro ◄ Decrementar número de menú Incrementar posición decimal ► Incrementar número de menú Decrementar posición decimal 2.2.-Menu-F en la SM-Keypad Plus Atención: las siguientes funciones descritas del Menú–F únicamente son soportadas en la SM-Keypad Plus con su fichero programado de texto adecuado. Para una rápida configuración con la SM-Keypad Plus programada, se puede utilizar el Menú F. Los parámetros de este menú están ordenados en el orden de la configuración. Para cambiar del menú del drive al Menu-F y viceversa: · Habilitar Menú-F: F51 / #41.51 = Filter Mostrar Menú-F · Habilitar Menú Equipo: F51 / #41.51 = Normal Mostrar Menú Unidrive SP ? La tecla Help permite el cambio de idioma. El menú F está preparado en dos idiomas (inglés y español). 5 Guía de Configuración Unidrive SP para Elevación 2.3.-Estructura del Menú F Menu-F Menu-Drive Descripción parámetro F00 #0.00 Parameter 0.00 AUTOCONFIGURACIÓN F01 #75.00 Código Selección Máquina F02 #75.01 Estado de carga / código cargado de máquina con autoconfiguración AJUSTE ENCODER F03 #03.38 Tipo de Encoder F04 #03.41 Configuración Automática del Encoder F05 #03.34 Líneas de Encoder por revolución MAPA DE MOTOR F06 #00.48 Modo de Operación F07 #00.46 Intensidad Nominal del Motor F08 #00.44 Tensión Nominal del Motor F09 #00.42 Número de polos del Motor F10 #00.45 Velocidad nominal del Motor (CL) / Constante de tiempo térmica (SV) F11 #00.43 Factor de potencia nominal (CL) / Ángulo de fasado del encoder (SV) F12 #00.41 Frecuencia de conmutación F13 #00.47 Frecuencia nominal del Motor F14 #00.40 Autoajuste CONFIGURACIÓN INSTALACIÓN F15 #19.29 Diámetro polea en mm F16 #20.10 Suspensión (1=1:1, 2=2:1) F17 #19.27 Denominador Ratio Reductor F18 #19.30 Numerador Ratio Reductor F19 #18.30 Velocidad Nominal Ascensor mm/s F20 #19.31 Cálculo Automático RPM Nominales F21 #18.29 Velocidad Nominal Ascensor RPM F22 #04.07 Límite de corriente simétrica F23 #18.45 Invertir dirección de la instalación CONFIGURACIÓN VELOCIDADES F24 #18.11 V1 (Inspección) mm/s F25 #18.12 V2 (Lenta) mm/s F26 #18.13 V3 (Rápida) mm/s F27 #18.14 V4 (Rescate) mm/s F28 #18.15 V5 (Intermedia) mm/s F29 #18.16 V6 velocidad mm/s F30 #18.17 V7 velocidad mm/s AJUSTES DE RAMPAS Y TIEMPOS F31 #19.28 Tiempo de despegue ms F32 #02.11 Rampa de aceleración mm/s2 F33 #02.21 Rampa de deceleración mm/s2 F34 #19.14 Jerk Arranque mm/s3 F35 #19.15 Jerk Marcha mm/s3 F36 #19.16 Jerk Paro mm/s3 F37 #19.25 Tiempo apertura Freno ms F38 #18.24 Tiempo cierre Freno ms AJUSTES DE GANANCIAS F39 #04.23 Filtro Corriente Arranque F40 #04.12 Filtro Corriente Marcha F41 #04.13 KP – Marcha Lazo Corriente F42 #04.14 KI – Marcha Lazo Corriente F43 #18.27 KP – Arranque Lazo Velocidad F44 #18.28 KI – Arranque Lazo Velocidad F45 #18.25 KP – Marcha Lazo Velocidad F46 #18.26 KI – Marcha Lazo Velocidad F47 #19.20 KP – Despegue Control posición MONITORIZACIÓN F48 #04.20 Porcentaje de Carga F49 #19.02 Velocidad Real mm/s F50 #18.10 Velocidad Referencia Seleccionada SELECCIÓN MENÚ F51 #41.51 Cambio Menu F / Menu Normal M1 10 10 SC.Endat On 2048 ppr SERVO Xx A 400 V 16 polos 89,0 0,0 º 12 KHz 240 mm 2 1 1 1000 mm/s OFF 160 rpm 175 % OFF 200 mm/s 60 mm/s 1000 mm/s 100 mm/s 500 mm/s 100 mm/s 100 mm/s 800 ms 500 mm/s2 550 mm/s2 300 mm/s3 650 mm/s3 400 mm/s3 500 ms 800ms 0,0 ms 0,0 ms 200 1200 4000 2800 2500 1000 10 1810 Filter Nota: Tabla Estándar Menu F versión v1.10. La definición de las velocidades depende de la maniobra. 6 Guía de Configuración Unidrive SP para Elevación 3.-Configuración Unidrive SP La versión y estado del software se puede verificar en los siguientes parámetros: · #20.01 Versión de Software · #20.02 Estado del Software (si el signo negativo parpadea es que funciona) Para parametrizar el equipo se utilizará la Auto Configuración (3.1) o la Programación por Smart Card (3.2). 3.1.-Función de Autoconfiguración Los pasos a seguir para realizar la autoconfiguración son los siguientes: 1) Seleccionar el código de máquina a cargar con el parámetro F01 / #75.00 2) F00 / #0.00 = 1070 + Reset 3) Verificar el estado de carga de la autoconfiguración: · Si F02 / #75.01 = F01 / #75.00 Función de Autoconfiguración OK · Si F02 / #75.01 = -1 Función de Autoconfiguración Incorrecta 4) Salvar parámetros: F00 / #0.00 = 1000 + Reset (botón rojo) 5) Para una recarga de máquina con Autoconfiguración realizar F01 / #75.00 = xxx y F02 / #75.01 = 0 (xxx hace referencia al código de máquina con Autoconfiguración que se quiere cargar) Atención: Si se han modificado parámetros fuera de las tablas de parámetros Standard será necesario antes de usar la función de Autoconfiguración cargar parámetros por defecto en el variador con la operativa: F00 / #0.00 = 1233 + Reset (botón rojo) Nota: Consultar la disponibilidad de las máquinas o configuraciones con ésta función de autoconfiguración al fabricante de la maniobra o a Control Techniques Iberia. 3.2.-Programación por Smart Card Programación del equipo utilizando un Bloque de Datos de la Smart Card F00 = 600x (x= Nº Bloque de Datos) Botón Reset F00 = 1000 Botón Reset · trip C.rtg (186) indica, que la fuente del bloque de datos fue creada desde un equipo de una potencia diferente. Los parámetros de motor y los límites de corriente no se programarán. Ajuste manual de F22 / #4.07 Límite de Corriente, F12 / #05.18 Frecuencia de Commutación y F07 / #05.07: Intensidad Nominal Motor. Nota: Programando el equipo con la Autoconfiguración o por Smart Card, se configurará el Modo de Trabajo (3.3), los Parámetros de Motor (3.5), los Parámetros de Encoder (3.4) además de la configuración de entradas y salidas para el funcionamiento del equipo. La realización de los pasos 3.3, 3.4 y 3.5 no será necesaria, pero es muy recomendable revisar que la configuración de estos pasos se ha realizado correctamente antes de pasar al Autoajuste del equipo (paso 3.6). 7 Guía de Configuración Unidrive SP para Elevación 3.3.-Cambio del Tipo de Motor A la entrega del equipo el modo de operación es para un motor de inducción sin encoder: F06 = OPEn.LP Para cambiar el modo de operación para un tipo de motor diferente: F00= 1253 Motor de inducción con encoder: F06=CL.Vect Servomotor con encoder: F06=Servo Confirmar cambio tipo de motor: Botón Reset Esperar 3 seg. 3.4.-Configuración del encoder Configuración dependiendo del tipo de encoder si no se ha realizado todavía: ·Encoder A, A/, B, B/, Z, Z/: Nº Par. F03 / #03.38 F04 / #03.41 F05 / #03.34 #03.26 ·SinCos Encoder: Nº Par. F03 / #03.38 F04 / #03.41 F05 / #03.34 #03.26 ·SinCos Hyperface: Nº Par. F03 / #03.38 F04 / #03.41 F05 / #03.34 #03.26 ·SinCos EnDat: Nº Par. F03 / #03.38 F04 / #03.41 F05 / #03.34 #03.26 Parámetro Tipo de Encoder Configuración Automática del Encoder Lineas de encoder por revolución Alimentación Encoder Valor Ab OFF Parámetro Tipo de Encoder Configuración Automática del Encoder Lineas de encoder por revolución Alimentación Encoder Valor SC OFF Parámetro Tipo de Encoder Configuración Automática del Encoder Lineas de encoder por revolución Alimentación Encoder Valor SC.Hyper ON Parámetro Tipo de Encoder Configuración Automática del Encoder Lineas de encoder por revolución Alimentación Encoder Valor SC.Endat ON 1024 5V 1024 5V 2048 8V 2048 5V 8 Guía de Configuración Unidrive SP para Elevación 3.5.-Configuración Datos de Motor Los datos de motor deberían ser introducidos y comprobados en los siguientes parámetros: · Datos Motor: Nº Par. F07 / #00.46 F08 / #00.44 F09 / #00.42 F10 / #00.45 F11 / #00.43 F12 / #00.41 F13 / #00.47 F22 / #04.07 Parámetro Intensidad Nominal del Motor Tensión Nominal del Motor Número de polos del Motor CL: Velocidad Nominal del Motor SV: Constante de tiempo térmica CL: Factor de potencia nominal SV: Ángulo de fasado del encoder Frecuencia de commutación CL: Frecuencia Nominal Motor SV: No se usa Límite de corriente simétrica Ejemplo 15 A 400 V 4 Pol 1450 U/min 89.0 sec 0.850 0.0º 6, 8,12KHz 50Hz, 60Hz 175% Para introducir los datos anteriores mirar la placa de motor. La frecuencia de commutación alta provoca mayores pérdidas térmicas en el variador y reduce la clasificación de potencia. Para reducir el ruido acústico del motor aumentar la frecuencia de commutación. El límite de corriente simétrica F22 / #04.07 depende del motor y del rango del equipo, debería ser introducido al máximo. 3.6.-Autoajuste Utilizando el autoajuste F14 / #00.40 el siguiente test se realizará de forma automática: 1.-Ajuste de ganancias lazo de corriente F41 / #04.13 y F42 / #4.14 2.-Ajuste del modelo motor (CL) / Angulo de fase (SV) F11 / #00.43 3.-Verificación del encoder de realimentación Si el angulo de fase de un servo motor (#0.43) no es conocido, el test con carga balanceada y la optimización manual debería ser utilizada. 3.6.1.-Motor de inducción con encoder Autoajuste del lazo de corriente · Durante este test el motor no girará y el freno no se liberará (se puede realizar con carga) · F14 / #00.40 = 1 – Arrancar en inspección y mantener la marcha · F14 / #00.40 = 0 – Parar la marcha en inspección · Comprobar lazo de ganancia de corriente F41 / #04.13 3.6.2.-Servomotor con encoder de realimentación Autoajuste lazo de corriente Si el ángulo de fase está en la placa de Motor (motor Wittur) puede ser introducido manualmente en F11 / #00.43 y únicamente el autoajuste del lazo de corriente es necesario: · Durante este test el motor no girará y el freno no estará liberado (se puede realizar con carga) · F14 / #00.40 = 4 – Arrancar en inspección y mantener la marcha · F14 / #00.40 = 0 – Parar la marcha en inspección · Comprobar lazo de ganancia de corriente F41 / #04.13 9 Guía de Configuración Unidrive SP para Elevación Autoajuste de Fasado Es necesario realizar el fasado como se indica: · Motor sin carga (si no es posible la carga balanceada) · F14 / #00.40 = 2 – Marcha Inspección · F14 / #00.40 = 0 – Paro Inspección (necesita aproximadamente 40 sec) En caso de fallo: · tunE3 – Cambiar cables U por V. · tunE1 – Comprobar lineas de encoder por revolución, número de polos,… · Si hay ruido en el motor introducir el F41 / #04.13 al 50% Nº Par. F11 / #00.43 F14 / #00.40 F41 / #04.13 F42 / #04.14 Parámetro CL: Factor de potencia SV: Ángulo de fasado del encoder Autoajuste KP - Marcha del lazo de corriente KI – Marcha del lazo de corriente Valor 0.850 0.0º 150 2000 3.7.-Parámetros de instalación Velocidades, aceleración y distancia pueden ser introducidas en unidades normales (mm/s, mm, mm/s2). El escalado de estos parámetros se realiza introduciendo los datos mecánicos de los parámetros de instalación como sigue: Nº Par. F15 / #19.29 F16 / #20.10 F17 / #19.27 F18 / #19.30 F19 / #18.30 F20 / #19.31 F21 / #18.29 Parámetro Diámetro polea en mm Suspensión (1=1:1, 2=2:1) Denominador Ratio Reductor Numerador Ratio Reductor Vel. Nominal Ascensor mm/s Cálculo Auto. RPM Nominales Velocidad Nominal Ascensor RPM Ejemplo 480mm 1 = 1:1 1 31 1000mm/s ON …U/min Si los datos mecánicos no están disponibles, hay que introducir F20 / #19.31 = 0, ajustar F19 / #18.30 en mm/s del ascensor y ajustar F21 / #18.29 con el valor de la hoja de datos o si no está disponible, con la velocidad nominal del motor en RPM. 3.8.-Configuración de Velocidades El software ofrece más de 10 velocidades. Con el Menú F las velocidades están definidas como muestra la siguiente tabla: · Velocidades Nº Par. F24 / #18.11 F25 / #18.12 F26 / #18.13 F27 / #18.14 F28 / #18.15 F29 / #18.16 F30 / #18.10 Parámetro V1 Velocidad Inspección mm/s V2 Velocidad Lenta mm/s V3 Velocidad Rápida mm/s V4 Velocidad Rescate mm/s V5 Velocidad Intermedia mm/s V6 velocidad mm/s Velocidad seleccionada en cada momento Ejemplo 50 mm/s 10mm/s 100mm/s 300mm/s 500mm/s 800mm/s -- Nota: La definición de las velocidades (INSPECCIÓN, LENTA, RÁPIDA,…) depende de la maniobra y de la tabla de velocidades con la que trabaje. La asignación hecha en la tabla superior sólo es a modo de ejemplo. 10 Guía de Configuración Unidrive SP para Elevación 3.9.- Configuración de tiempos del freno Utilizando el retardo de tiempo del freno, la operativa del freno debería ser optimizada. Retardo de tiempos del freno: Nº Par. F37 / #19.25 F38 / #18.24 Parameter Tiempo de liberación de freno (ms) Tiempo de aplicación de freno (ms) Value 500 800 Nota: Si el control de los contactores de potencia se hace desde la maniobra, es recomendable consultar el parámetro de lectura #20.20 -Tiempo de retardo de caída de Contactores desde el fín de la secuencia de paro del variador. Para un correcto ajuste del tiempo de aplicación de freno (F38 / #18.24) el parámetro #20.20 debe ser positivo y superior a 50ms. En caso de obtener valores negativos en #20.20 es posible que haya movimiento no deseado de la cabina durante el cierre del freno y durante el control a velocidad cero en la parada. En este caso disminuiremos F38 / #18.24 hasta obtener el valor positivo de #20.20 o bien incrementaremos el retardo de caída de contactores controlado desde la maniobra. Secuencia de Control del Freno: 3.10.-Filtro de corriente Utilizando las constantes de filtro de demanda de corriente es posible reducir el ruido acústico. Valores de entre 1.0 y 5.0 ms se usan normalmente. Nº Par. F39 / #04.23 F40 / #04.12 Parameter Filtro de corriente 1 (Arranque) Filtro de corriente 2 (Marcha) Value 0.0 - 2.0ms 0.0 - 2.0ms 11 Guía de Configuración Unidrive SP para Elevación 3.11.- Lazo Corriente Las ganancias del lazo de corriente se ajustan automáticamente con el autoajuste. Reduciendo la ganancia proporcional del lazo de corriente F41 / #04.13 permite eliminar ruido de alta frecuencia en el motor. · Ganancias lazo de corriente: Nº Par. F41 / #04.13 F42 / #04.14 Parámetro KP – Marcha del lazo de corriente KI – Marcha del lazo de corriente Valor 100 - 200 1200 - 1600 Nota: Se recomienda ajustar las ganancias de arranque y parada igual que las de marcha. 3.12.-Lazo de Velocidad Las ganancias del lazo de velocidad están ajustadas de forma separada para el arranque y la marcha del viaje. Los valores óptimos dependen del motor, la mecánica y del ascensor. Los valores dados son valores básicos para un motor de inducción con reductor. Para máquina con servomotor sin reductor, estos valores pueden a ser hasta 10 o 20 veces mayores. Ganancias Lazo de Velocidad: Nº Par. F43 / #18.27 F44 / #18.28 F45 / #18.25 F46 / #18.26 Parameter KP – Arranque del lazo de velocidad KI – Arranque del lazo de velocidad KP – Marcha del lazo de velocidad KI – Marcha del lazo de velocidad Value 1000-6000 1000-5000 500-3000 500-2500 Aumentar la KP y KI de arranque hasta conseguir un buen confort durante la apertura de freno. Aumentar las ganancias de viaje hasta conseguir una velocidad estable sin oscilaciones ni vibraciones. Nota: Se recomienda ajustar las ganancias de parada igual que las de marcha 3.13.-Lazo de Posición El controlador de posición impide girar la polea (contramarcha) y producir un jerk incómodo en la cabina, cuando el freno se abre. En condiciones duras de control de velocidad, normalmente se necesitan encoders sincos. El valor óptimo depende de la ganancia del lazo de velocidad configurada. El valor obtenido es un valor básico y podría ser necesario incrementarlo hasta 5 veces. · Ganancias Lazo de Posición: Nº Par. F47 / #19.20 Parámetro KP – Ganancia del lazo de posición Valor 10 Ajustar ganancia derivativa del control de posición (Kd - #19.12) en caso necesario. Reducir Kd en caso de vibraciones al abrir freno. 12 Guía de Configuración Unidrive SP para Elevación 4.-Primer Test y Selección de Dirección 4.1.-Comprobar el Conexionado del Equipo y la Maniobra de Control (ejemplo conexionado) Bit 2 Velocidad Reserva Función 0V +10 V Bit 2 Velocidad no usada Termistor Termistor motor Reserva Control Freno Bit 1 Velocidad RUN Subir RUN Bajar Bit 0 Velocidad Habilitación Equipo OK Nota: 0V 0V 24 V / Salida 0V no usada Abrir freno Bit 1 Velocidad RUN Subir. RUN Bajar. Bit 0 Velocidad 0V Habilitación Equipo OK Param. ← #18.38 → → → → ← ← ← #18.31 #18.37 #18.44 #19.44 #18.36 ↔ ↔ ↔ → → → → #10.01 → ← Term. 3 4 5 6 7 8 9 10 11 21 22 23 24 25 26 27 28 29 30 31 41 42 Estado #07.01 #07.02 #07.03 #08.08 #08.01 #08.02 #08.03 #08.04 #08.05 #08.06 #08.09 #08.07 Función Equipo 0V – común +10 V salida Entrada Digital / AI1 Común AI1 Entrada Digital / AI2 Entrada Termistor / AI3 AO1 Salida Analogica 1 AO2 Salida Analogica 2 0V – común 0V – común +24V salida ( 200mA ) 0V – común IO1 Entrada/Salida Digital 1 IO2 Entrada/Salida Digital 2 IO3 Entrada/Salida Digital 3 I4 Entrada Digital 4 I5 Entrada Digital 5 I6 Entrada Digital 6 0V – común Habilitación Equipo Contacto Relé Contacto Relé La lógica de control es positiva usando el T22 como fuente de 24VDC Para invertir el sentido de la instalación cambiar el parámetro #18.45=On / Off Tabla de Selección de Velocidades por combinación binaria (#18.42=Off): Ajuste Vel. Bit 0 Estado Bit 1 Bit 2 T29 T26 T5 Terminales Estado terminales #8.06 #8.03 #7.01 Estado bits velocidades #18.36 #18.37 #18.38 #18.10 Velocidad = 0 0 0 0 =1810 #18.11 1 0 0 =1811 V1 – Inspección #18.12 0 1 0 =1812 V2 – Lenta #18.13 1 1 0 =1813 V3 – Rápida #18.14 0 0 1 =1814 V4 – Rescate #18.15 1 0 1 =1815 V5 – Intermedia #18.16 0 1 1 =1816 V6 – Velocidad 6 #18.17 1 1 1 =1817 V7 – Velocidad 7 Nota: La definición de las velocidades (INSPECCIÓN, LENTA, RÁPIDA,…) depende de la maniobra y de la tabla de velocidades con la trabaje. La asignación hecha en la tabla superior sólo es a modo de ejemplo. 13 Guía de Configuración Unidrive SP para Elevación 4.2.-Pasos a Realizar para la Puesta en Marcha Para comprobar el control y la dirección de la marcha del ascensor en Inspección y observar el movimiento de la cabina. · Visualiza la corriente activa F48 / #04.20 · Orden de marcha Inspección y comprobar la corriente y el movimiento del motor. · Si no se visualiza “Run” Comprobar Terminal 31, 27 y 28 · Si F48 / #04.20 permanece a cero Comprobar los contactores del motor y la maniobra de control. · Si Trip 70 o Trip 71 Comprobar el motor y la conexión de encoder, ángulo de fase y ganancias lazo de velocidad. · Si Trip It.ACComprobar que la carga esté balanceada y el ángulo de fase. · Si hay un ruido fuerte acústico (motores gearless) Reducir a la mitad los valores de las ganancias del lazo de corriente, parámetros F41 / #04.13 y F42 / #04.14 · Si el motor gira poco o para por sobrecorriente Comprueba el número de polos F09 / #05.11, y las linias de encoder por revolución F05 / #03.34 · Si el motor gira en sentido contrario Introducir F23 / #18.45 = ON · Para CL / SV y un mal funcionamiento del motor Comprueba conexionado de encoder y malla. · Otro tipo de fallo ver Diagnóstico (apartado 5.0) · Si no hay fallos Continuar con el ajuste de ganancias de velocidad Parámetros de Diagnóstico: Nº Par. Parameter Unidades F48 / #04.20 …% Corriente Activa F49 / #19.02 …mm/s Velocidad Actual F50 / #18.10 Velocidad Seleccionada · Si no hay movimiento de motor Comprobar F50 / #18.10 con la orden de marcha. · Si F50 / #18.10 = 1810 Comprobar la maniobra de control. Las señales de selección de velocidad no llegan al variador (bits #18.36 / #18.37 / #18.38 / …). 4.2.1.-Ajuste de las Ganancias del Lazo de Velocidad Con los valores recomendados puede ser necesario un ajuste fino. Utilice la velocidad de inspección para el ajuste de ganancias. · Ajuste de la ganancia proporcional del lazo de velocidad Incrementar F45 / #18.25 en pasos de 100 hasta que aparezca ruido o sea inestable · Si hay ruido en el motor Incrementa filtro de corriente en marcha F40 / #04.12 de 1 a 2 ms · Si es inestable el motor Reduce F45 / 18.25 al 60% del valor · Configurando la ganancia Integral del lazo de velocidad: Pon F46 / #18.26 al 50% de F45 / #18.25 Nota: Si se usan ganancias de velocidad variables (#18.48 = ON) se deberán ajustar las ganancias de arranque con valor igual o mayor que las de marcha. Las ganancias de arranque (F43 / 18.27 y F44 / 18.28) suelen ser el doble de las de marcha (F45 / 18.25 y F46 / 18.26). 14 Guía de Configuración Unidrive SP para Elevación El software de elevación tiene diferentes opciones en el ajuste de los lazos de velocidad y corriente. La diferente exigencia en los lazos de regulación durante el arranque, el viaje o la parada puede hacer necesario el ajuste individual de cada una de estas situaciones. Las dos configuraciones más típicas son: Ganancias variables de velocidad (#18.48=ON) y constantes de corriente (#19.48=OFF): 15 Guía de Configuración Unidrive SP para Elevación Ganancias variables de velocidad (#18.48=ON) y variables de corriente (#19.48=ON): 16 Guía de Configuración Unidrive SP para Elevación 4.3.-Optimización El objetivo de la optimización es un viaje en ascensor rápido y confortable. Además, del sentimiento subjetivo del operador, és recomendable utilizar la función osciloscopio de la herramienta de configuración LiftSP desde su portatil. Referirse a la ayuda del software de elevación para la descripción detallada del proceso de optimización. La optimización se realiza haciendo viajes entre plantas con la cabina vacía. ·Atención: Cambiar los parametros de configuración puede producir que el ascensor llegue a los finales de carrera de planta. Curva de Velocidad con Nivelación: 4.3.1.-Liberación de Freno · Jerk / Movimiento de la polea cuando el freno abre Incrementar la Ganancia Proporcional F43 / #18.27 para una rápida reacción hasta controlar el ruido / inestabilidad. Incrementar F39 / #04.23 para reducir el ruido de motor. Incrementar la Ganancia Integral F44 / #18.28 para una reacción más rígida. Si continúa el movimiento de la polea, incrementar la Ganancia Proporcional del lazo de posición F47 / #19.20. Si se producen vibraciones, decrementa F47 / #19.20 hasta el 60%. 4.3.2.-Arranque Suave · Jerk después de la liberación de freno Decrementa el jerk de rampa en S F34 / #19.14 para permitir una marcha suave en el perfil durante el arranque. Si hay una elevada fricción (ascensor mochila), activar la función de despegue suave incrementando el tiempo de despegue F31 / #19.28 hasta 1200ms. Si el arranque es demasiado largo, reducir F31 / #19.28. Si se arranca con el freno activado, incrementar el tiempo de liberación del freno F37 / #19.25. Si permanece quieto despues de la liberaración del freno, reducir el tiempo de liberación de freno F37 / #19.25. 17 Guía de Configuración Unidrive SP para Elevación 4.3.3.-Aceleración · Demasiada rapidez en el cambio de aceleración Decrementa el jerk de marcha de rampa en S, F35 / #19.15 para un cambio suave de aceleración durante el viaje. · Vibraciones durante una aceleración constante Comprobar si se sobrepasa el porcentaje de carga F48 / #04.20 Comprobar que el límite de sobrecarga F22 / #04.07 está a 175% o superior En este caso, reducir la aceleración F32 / #02.11 4.3.4.-Velocidad Constante · Vibraciones durante el viaje y la deceleración Incrementar la ganancia proporcional del lazo de velocidad F45 / #18.25 y la integral F46 / #18.26. Si hay ruido en el motor incrementar F40 / #04.12 hasta un máximo de 5ms. Si hay inestabilidad reduce F46 / #18.26 hasta el 60%. 4.3.5.-Deceleración Verificar parámetro #19.08, distancia de deceleración calculada en mm. Este valor indica la distancia recorrida desde la señal de pérdida de rápida hasta que la cabina consigue velocidad lenta. Se debe conseguir que la cabina llegue a velocidad lenta antes de recibir la orden de parada en piso. Este ajuste permitirá una parada precisa e idéntica en cada planta siempre que tengamos las pantallas de cambio (detectores) equidistantes respecto de cada planta. Para incrementar la distancia de deceleración reduce la deceleración F33 / #02.21 (más lenta) y / o reduce el jerk de marcha F35 / #19.15 Para decrementar la distancia de deceleración, incrementa la deceleración F33 / #02.21 y / o incrementa el jerk de run F35 / #19.15. 4.3.6.-Aproximación / Parada · Parada con jerk. Sensación de fuerte desaceleración. Reducir el jerk de parada de rampa en S F36 / #19.16. · Movimiento de la polea al cerrar el freno Comprueba que la deshabilitación del variador se produce cuando la secuencia de paro se ha terminado completamente (#20.20 > 50ms). Incrementa el tiempo de aplicación del freno F40 / #18.24 para aumentar el tiempo de cierre mecánico. Aumentar el tiempo de retardo de caída de contactores desde la maniobra para que #20.20 sea positivo. 4.3.7.-Guardar Configuración · Guardar la configuración en el drive F00 = 1000 + Pulsador de Reset (Rojo) 4.3.8.-Grabar configuración en la Smart Card #F00 = 700x Borrar bloque x si existe (x= Nº Bloque de Datos) Botón Reset #F00 = 400x Salvar parámetros del equipo en el bloque x de la Smart Card Botón Reset 18 Guía de Configuración Unidrive SP para Elevación 5.-Diagnóstico 5.1.-Códigos de fallos y acciones correctivas El Unidrive se protege a él mismo, al entorno de control y al motor. Si el sistema de monitorización detecta un problema, se lanza un fallo. Para identificar las causas del fallo referirse a la siguiente tabla: Mensaje Fallo Trip 70 Tipo de Fallo Error velocidad Causa del Fallo ·Encoder, conexión de motor ·Configuración de ganancias Acciones correctivas Comprobar el conexionado del motor y encoder, así como la configuración de ganancias. Incrementar el #19.24 si es necesario. Para deshabilitar este error configura el parámetro #19.24 = 0 Trip 71 Error de posición ·Encoder, conexión de motor ·Configuración de ganancias ·Balanceado del ascensor Comprobar el conexionado del motor y encoder, así como la configuración de las ganancias y el angulo de fase. Incrementar nivel #19.18 si fuera necesario. Para deshabilitar este error configura el parámetro #19.18 = 0 Trip 73 Apertura Freno ·Mirar conexionado contactos de freno ·Mirar bits #19.39 y #19.40 (0:freno cerrado; 1:freno abierto) Una vez el variador da la orden de apertura de freno, cuenta el tiempo hasta que recibe la señal de freno abierto. Si este tiempo es superior que el valor introducido en el parámetro #20.29 (en ms), se producirá el trip 73. Anular vigilancia con #20.29=0 Trip 74 Caída Freno ·Mirar conexionado contactos de freno ·Mirar bits #19.39 y #19.40 (0:freno cerrado; 1:freno abierto) Cuando el drive quita la orden de freno abierto, este cae. Se cuenta el tiempo desde que se quita la señal hasta la recepción de la señal de freno cerrado. Si este tiempo es superior que el valor en el parámetro #20.29, se producirá el trip 74. Anular vigilancia con #20.29=0 Trip 75 Cierre de Contactores ·Comprobar el cierre de contactores de línea ·Mirar conexionado T31 ·Mirar estado T31 (#8.09) (0: contactores abiertos; 1: contactores cerrados) Cuando el drive da la orden de cierre de contactores, se cuenta el tiempo hasta la recepción de la señal de contactores cerrados en el T31. Si el tiempo excede del valor introducido en el parámetro #20.30 se producirá el fallo trip 75. Anular vigilancia con #20.30=0 Trip 76 Caída de contactores ·Comprobar el cierre de contactores de línea ·Mirar conexionado T31 ·Mirar estado T31 (#8.09) (0: contactores abiertos; 1: contactores cerrados) Cuando el drive borra la orden de cierre de contactores, éste cae. Se cuenta el tiempo desde que se quita la señal del variador hasta que desaparece la señal de cierre de contactores. Si este tiempo excede del valor introducido en el parámetro #20.30, se producirá el fallo trip 76. Anular vigilancia con #20.30=0 Trip 77 Control de inicio de Secuencia ·Comprobar secuencia mirando el estado de terminales Cuando se da la orden de marcha (subir o bajar), la entrada de selección de velocidad no puede exceder de 1 segundo o viceversa. Si este tiempo excede de 1 segundo el trip 77 aparecerá. Anular vigilancia con #19.38=OFF 19 Guía de Configuración Unidrive SP para Elevación Trip 78 Control final de Secuencia ·Comprobar secuencia mirando el estado de terminales Cuando se quita la entrada de velocidad, la orden de marcha (subir o bajar), debe ser quitada antes de 3 segundos, sino el trip 78 aparecerá. Anular vigilancia con #19.38=OFF Trip 79 Caída de contactor de freno y caída de contactores. ·Mirar bit de vigilancia #19.46 (1: contactores abiertos; 0: contactores cerrados) Cuando se quita la orden de marcha, el contactor de freno deberá caer al igual que los contactores de potencia. Se contará el tiempo desde la caída de la orden de marcha hasta la entrada que indica que todos los contactores están abiertos/caídos. Si este tiempo excede del valor introducido en el parámetro #20.31, el trip 79 aparecerá. Anular vigilancia con #20.31=0 It.AC Sobrecarga Motor ·Sobrecarga de Motor ·Alteraciones en la señal de encoder Comprobar si el freno está liberado. Comprobar el balanceado de la carga. Comprobar el encoder sincos, comprueba la malla. Comprobar el parámetro #04.15. Comprobar offset de commutación de los servomotores. OI.AC Sobrecorriente en la salida del drive · Cortocircuito o fallo a tierra en la armadura del motor. · Fallo de encoder Causado si la salida de corriente > 210% de la corriente nominal. Comprobar el aislamiento de la armadura del motor. Comprobar las señales de encoder. OI.br Sobrecarga en la resistencia de frenado ·Fallo de tierra en la resistencia de frenado. O.Spd Sobre Velocidad La velocidad del motro ha excedido del nivel de sobre velocidad Comprobar el aislamiento de la resistencia dinámico de frenado. Comprobar el valor de la resistencia con lo que se indica en las especificaciones. Incrementar el nivel de sobrevelocidad. Reducir la ganancia proporcional del lazo de velocidad. OU Sobre tensión ·Rotura de potencia ·Fallo de motor a tierra Comprobar el aislamiento de la resistencia dinámica de frenado y el valor resistivo Comprobar el aislamiento de la armadura del motor. Ph Pérdida de Fase Motor thermistor Baja tensión ·Fusible principal Comprobar fusibles y alimentación principal ·Motor temperatura Comprobar temperatura del motor. Comprobar la continuidad del termistor. Causado cada vez que quitamos la alimentación principal. Si se genera durante el funcionamiento comprobar fusibles y alimentación. Th UU ·Conexión principal O.Ld1 Sobrecarga en las salidas digitales ·La corriente total de la alimentación de 24v de las salidas digitales excede de 200mA. Comprobar el total de la carga en las salidas digitales (terminales: 24, 25, 26) y los +24v en el terminal 22. Comprobar configuración I/O SLx.dF Fallo en el módulo situado en el slot X · El tipo de módulo puesto en el slot x ha cambiado. Grabar parámetros y resetea. 20 Guía de Configuración Unidrive SP para Elevación SLx.Er Fallo en el módulo situado en el slot X Fallo en el módulo situado en el slot X ·El módulo situado en el slot X ha detectado un fallo. Comprobar el valor en el parámetro x.50. Y comprobar el fallo en el manual. ·El módulo ha sido quitado del slot X. Asegurar que el módulo está puesto correctamente en el slot. Grabar parámetros y realizar un reset del drive. Enc1 Sobrecarga alimentación del encoder. ·Cable de encoder ·Conexión del encoder ·Alimentación del encoder Enc2 Rotura de cable de encoder ·Rotura de cable ·Cable de Encoder Enc3 Error en la commutación de encoder ·Fasado incorrecto ·Ruido en el encoder Enc4 Fallo de comunicaciones con encoder ·Fallo comunicaciones ·Velocidad incorrecta ·Mal conexionado Enc7 Fallo inicialización encoder ·Fallo en la inicialización Comprobar la conexión de encoder y la alimentación del encoder. Comprobar la configuración de la alimentación del encoder. Comprobar que la conexión de encoder esté completa. Comprobar la configuración de la alimentación del encoder. Comprobar configuración y conexión de la interficie serie del encoder. Comprobar conexión malla. - Encoder SSI con código gray: #03.41 =OFF Comprobar alimentación del encoder Comprobar tipo de encoder y velocidad de comunicación. Comprobar conexionado. Reiniciar equipo. Comprobar tipo de encoder. Comprobar conexionado encoder. Comprobar alimentación. Realizar la autoconfiguración. Reemplazar encoder. TunE1 Fallo autoajuste Asegurar que el motor puede girar libremente (freno liberado). Comprobar el acoplamiento del codificador al motor. TunE2 Fallo autoajuste · La realimentación de posición no ha cambiado o no se ha alcanzado la velocidad necesaria durante el autoajuste · Dirección incorrecta de la realimentación de posición o no se pudo detener el motor durante el autoajuste TunE7 Fallo autoajuste · Ajuste incorrecto del número de polos del motor C.Acc Fallo SMARTCARD · Fallo lectura / escritura SMARTCARD C.Chg Fallo SMARTCARD · La posición de memoria ya contiene información C.Err Fallo SMARTCARD C.Full Fallo SMARTCARD Fallo Hardware · Los datos de la SMARTCARD son inservibles · SMARTCARD llena Comprobar número de lineas por revolución del encoder. Comprobar número de polos del motor. Comprobar que la SMARTCARD está insertada corretamente Cambiar SMARTCARD Borre los datos de la posición en memoria. Introduzca información en una posición de la memoria alternativa. Verifique que la tarjeta está bien colocada. Borre los datos y vuelva a intentarlo. Cambie de SMARTCARD. Elimine un bloque de datos o utilice una SMARTCARD distinta. Error en el Hardware del equipo. Ver codigo “XX” de error y consultar manual o servicio técnico. SLx.nf HFXX · Fallo Hardware Comprobar cableado del motor. Comprobar cableado encoder. Intercambiar dos fases de motor. 21 Guía de Configuración Unidrive SP para Elevación 6.-Recomendaciones para conexionado de encoder 6.1.-Encoder 6.2.-Encoder SinCos 22 Guía de Configuración Unidrive SP para Elevación 7.-Parámetros Variables Estándar para Máquina Síncrona / GEARLESS (SV) Menu F Parámetro Descripción #20.35 Identificación Parámetros Maq. Ejemplo M.1 M.2 M.3 M.4 1001 Código de Carga Automática F01 F02 #75.00 #75.01 Seleccionar código en #75.00 Estado carga / código cargado en variador #0.48 #0.46 #0.43 #0.42 #0.41 Modo Corriente Nominal Fasado Número de Polos = 120*Hz/rpm Frecuencia de Conmutación 10 10 Mapa Motor F06 F07 F11 F09 F12 SERVO XX A 0º 16 polos 12 KHz Configuración Instalación F21 F19 F16 F15 F18 F17 F23 #18.29 #18.30 #20.10 #19.29 #19.30 #19.27 #18.45 Velocidad Motor (rpm) Velocidad Ascensor (mm/s) Suspensión 1=1:1, 2=2:1, 3=3:1, 4=4:1 Diámetro Polea (mm) Relación Reductor Numerador Relación Reductor Denominador Invertir Dirección (ON / OFF) 160 rpm 1000 mm/s 2 240 mm 1 1 OFF Ajuste del Freno F37 F38 #19.25 #18.24 #18.23 Tiempo de apertura Tiempo de caída Tiempo de desmagnetización (SV) 250 ms 800 ms 500 ms Velocidades (puntero vel. Seleccionada #18.10[F50]) F24 F25 F26 F27 F28 F29 F30 #18.11 #18.12 #18.13 #18.14 #18.15 #18.16 #18.17 V1 – Inspección V2 – Lenta V3 – Rápida V4 – Rescate V5 – Intermedia V6 – Velocidad 6 V7 – Velocidad 7 #18.18 #19.17 #19.28 Velocidad de despegue Jerk Despegue Tiempo despegue #2.11 #2.21 #19.13 Aceleración Deceleración Deceleración Parada #19.14 #19.15 #19.16 Arranque Viaje Parada 200 mm/s 50 mm/s 1000 mm/s 100 mm/s 500 mm/s - mm/s - mm/s Despegue F31 10 mm/s 10 mm/s3 800 ms Rampas F32 F33 500 mm/s2 550 mm/s2 1000 mm/s2 Jerks F34 F35 F36 300 mm/s3 650 mm/s3 400 mm/s3 Ajustes de Ganancias Variables Control de Posición F47 #19.20 #19.12 Kp Kd 20 30 Control de Velocidad Arranque F43 F44 #18.27 #18.28 Kp (x.xxxx) Ki (x.xx) 4000 2800 Kp - #3.10 Ki - #3.11 2500 600 Kp Ki 2500 2000 Kp Ki 200 1200 Kp Ki 200 1200 Kp Ki 200 1200 Marcha F45 F46 #18.25 #18.26 Parada #20.27 #20.28 Control de Corriente Arranque #20.25 #20.26 Marcha F41 F42 #4.13 #4.14 Parada #21.22 #21.23 Filtro F39 F40 #3.42 #4.23 #4.12 #21.16 Filtro de encoder Filtro de corriente Arranque Filtro de corriente Marcha Filtro de corriente en Parada 0 ms 0.0 ms 0.0 ms 0.0 ms 23 Guía de Configuración Unidrive SP para Elevación 8.- Parámetros Variables Estándar para Máquina Asíncrona con Encoder (CL) Menu F Parámetro Descripción #20.35 Identificación Parámetros Maq. Ejemplo M.1 M.2 M.3 M.4 22001 Código de Carga Automática F01 F02 #75.00 #75.01 Seleccionar código en #75.00 Estado carga / código cargado en maquina #0.48 #0.47 #0.46 #0.45 #0.44 #0.43 #0.42 #0.41 Modo Frecuencia Nominal Corriente Nominal Rpm Nominales Tensión del Motor Factor de Potencia Número de Polos Frecuencia de Conmutación 220 220 Mapa Motor F06 F13 F07 F10 F08 F11 F09 F12 CL Vect 50Hz XX A XXX Rpm 400 V 0.850 Auto 8 KHz Configuración Instalación F21 F19 F16 F15 F18 F17 F23 #18.29 #18.30 #20.10 #19.29 #19.30 #19.27 #18.45 Velocidad Motor (rpm) Velocidad Ascensor (mm/s) Suspensión 1=1:1, 2=2:1, 3=3:1, 4=4:1 Diámetro Polea (mm) Relación Reductor Numerador Relación Reductor Denominador Invertir Dirección (ON / OFF) 1450 rpm 1000 mm/s - mm OFF Ajuste del Freno F37 F38 #19.25 #18.24 #18.23 Tiempo de apertura Tiempo de caída Umbral de magnetización (CL) (0.1%) 1000 ms 800 ms 500 Velocidades (puntero vel. Seleccionada #18.10[F50]) F24 F25 F26 F27 F28 F29 F30 #18.11 #18.12 #18.13 #18.14 #18.15 #18.16 #18.17 V1 – Inspección V2 – Lenta V3 – Rápida V4 – Rescate V5 – Intermedia V6 – Velocidad 6 V7 – Velocidad 7 #18.18 #19.17 #19.28 Velocidad de despegue Jerk Despegue Tiempo despegue #2.11 #2.21 #19.13 Aceleración Deceleración Deceleración Parada #19.14 #19.15 #19.16 Arranque Viaje Parada 200 mm/s 50 mm/s 1000 mm/s 100 mm/s 500 mm/s - mm/s - mm/s Despegue F31 5 mm/s 5 mm/s3 1000 ms Rampas F32 F33 500 mm/s2 800 mm/s2 1000 mm/s2 Jerks F34 F35 F36 500 mm/s3 900 mm/s3 350 mm/s3 Ajustes de Ganancias Variables Control de Posición F47 #19.20 #19.12 Kp Kd 10 60 Control de Velocidad Arranque F43 F44 #18.27 #18.28 Kp (x.xxxx) Ki (x.xx) 1000 600 Kp - #3.10 Ki - #3.11 1000 600 Kp Ki 1000 600 Kp Ki 100 1600 Kp Ki 100 1600 Kp Ki 100 1600 Marcha F45 F46 #18.25 #18.26 Parada #20.27 #20.28 Control de Corriente Arranque #20.25 #20.26 Marcha F41 F42 #4.13 #4.14 Parada #21.22 #21.23 Filtro F39 F40 #3.42 #4.23 #4.12 #21.16 Filtro de encoder Filtro de corriente Arranque Filtro de corriente Marcha Filtro de corriente en Parada 0 ms 2.0 ms 2.0 ms 2.0 ms 24 Guía de Configuración Unidrive SP para Elevación 9.-Parámetros Fijos Estándar del Variador Parámetros Específicos #18.48 Ganancias de velocidad variables #19.48 Ganancias de corriente variables #19.11 Tiempo transición ganancias #19.26 #18.42 #18.47 #20.12 Run Subir, Run Bajar Selección por combinación binaria Función parada corta activada (PEAK CURVE) Velocidad de nivelación para parada corta (PEAK CURVE) Parámetros Vigilancias #19.18 Habilita fallo error de posición (trip 71) #19.24 Habilita fallo error de velocidad (trip 70) #19.38 Habilita control de secuencia - trip 77/78 #20.29 ms Tiempo de control de apertura/caída Señales de freno - trip 73/74 #20.30 ms Tiempo de control de cierre/apertura de Contactores T31 - trip 75/76 #20.31 ms Tiempo de caída contactor de Freno + Contactores - trip79 #07.15 Habilitación Control del Termistor (dispara a >3300 ohms) (Bornas T8 y T11) #07.32 Habilitación Autoreset del Termistor (reset a <1800 ohms) #20.08 Tiempo lectura de corrientes para rescate favorable (#19.37) Maq. Ejemplo ON ON 1000 ms #08.23 #08.24 #08.25 #08.26 #08.27 18.37 18.44 19.44 18.36 10.01 Preapertura de puertas #18.21 Umbral de preapertura de puertas (mm/s) Resistencia de Frenado #10.30 Tiempo de conexión #10.31 Tiempo de ciclo Función Autoreset #10.34 Número de intentos #10.35 Retardo entre intentos M.1 M.2 200 mm 200 mm/s OFF 0 ms 0 ms 0 ms Th.disP 47.7 200 ms 0.00 OFF 18.31 ON Configuración Entradas Salidas DIGITALES #07.10 T5 - Bit 2 Velocidad (Conectar bornas T3 y T6 juntas) #07.14 T7 - Entrada digital libre M.2 1 OFF ON 1812 Configuración Entradas Salidas DIGITALES #08.21 T24 - Reserva #08.31 T24 como salida #08.22 T25 - Salida contactor Freno #08.32 T25 como salida T26 – Bit 1 Velocidad T27 - Run Subir T28 - Run Bajar T29 – Bit 0 Velocidad T41-42 - Drive OK M.1 18.38 0.00 300 mm/s 0.0 seg 0.0 seg 2 veces 8.0 seg 10.-Configuración Estándar Encoder Incremental #03.38 #03.40 #03.39 #03.36 #03.34 Tipo de Encoder ( Incremental ) Error de ruptura de cable activado Resistencias de terminación activadas Alimentación Lineas por revolución Absoluto SC.Endat #03.38 Tipo de Encoder ( SinCos Endat ) #03.41 Autoconfiguración ( se configura automática al resetear ) #03.40 Error de ruptura de cable activado #03.39 Resistencias de terminación activadas #03.37 Velocidad de Comunicación (Auto) #03.36 Alimentación #03.35 Bits por revolución (Auto) #03.34 Líneas por revolución (Auto) Maq. Ejemplo Ab(0) 1 1 5V 4096 ppr SC.Endat(9) ON 1 1 300 Kb 5V 13 bits 2048 ppr 25 Guía de Configuración Unidrive SP para Elevación 11.-Referencia de Documentos (www.controltechniques.com) 1. Guía de Usuario Unidrive SP Solución de Elevación (disponible en diferentes idiomas) 2. Guía de Usuario Unidrive SP Talla 0 - 6 26 Guía de Configuración Unidrive SP para Elevación 27