TEMA 2
Anuncio

Métodos de Aproximación
1
TEMA 2. MÉTODOS DE APROXIMACIÓN
2.1. Introducción.
2.2. Filtros de Butterworth (máximamente plano).
2.3. Filtros de Chebyshev (de rizado constante).
2.3.1. Filtros Inversos de Chebyshev
2.4. Filtros Elípticos (de Cauer).
2.5. Filtros de Bessel-Thomson.
2.6. Transformación de frecuencia.
2.6.1. Paso-Bajo a Paso-Alto ( LP → HP )
2.6.2. Paso-Bajo a Paso-Banda ( LP → BP )
2.6.3. Paso-Bajo a Rechazo-Banda ( LP → BR )
2.7. Diseño asistido por computador.
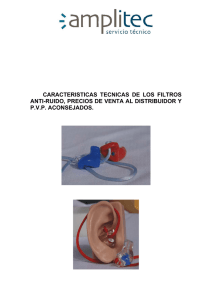
2.1. Introducción.
Es fácil comprobar que un filtro, cuya función de transferencias sea tal como el de la
figura 2.1a no es físicamente realizable (atenta contra el principio de causalidad).
H ( jω )
2
H ( jω )
2
1
1
ωp
1
(1 + ε )
1
(1 + δ 2 )
2
ω
a) Filtro paso-bajo ideal
ωp
ωs
b) Filtro realizable paso-bajo con tolerancias
en banda pasante (ε > 1) y banda atenuación
(δ > 1)
Figura 2.1. Especificaciones de un filtro.
Para el diseño de una función de aproximación resulta de interés trabajar con el
cuadrado de la magnitud de H ( jω ) .
H ( jω )
1
Ν ( jω )⋅ Ν (− jω ) Ν ( jω ) ∆
= H ( jω )⋅ H (− jω ) =
=
2 =
2
D( jω )⋅ D(− jω ) D ( jω )
1 + K ( jω )
2
2
donde K (s ) se define de manera que:
(2.1)
Métodos de Aproximación
K ( jω ) =
2
D ( jω ) − Ν ( jω )
2
Ν ( jω )
2
2
= ε2 ⋅
F ( jω )
Ν ( jω )
2
2
2
(2.2)
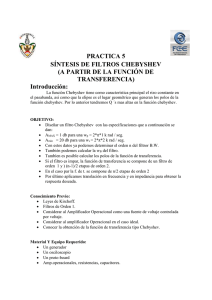
A la función K (s ) se le denomina función característica. De las especificaciones de la
figura 2.1b se deduce que (figura 2.2):
K ( jω ) debe ser aproximadamente cero en la banda pasante, con rizado menor que ε 2
2
K ( jω ) debe ser mayor que δ 2 a lo largo de la banda de atenuación
2
con ε 2 = 100.1 Ap − 1 y δ 2 = 100.1 As − 1
Ap (dB) = min {20 log10 H ( jω ) }en la banda pasante
siendo
As (dB) = max {20 log10 H ( jω ) }en la banda de atenuación
K ( jω )
(2.3)
2
δ2
ε2
ωp
ωs
ω
Figura 2.2. Especificaciones transformadas para K ( j ω ).
El polinomio F (s ) recibe el nombre de polinomio de ceros de reflexión. De (2.1) se
deduce que sus ceros ω ri (ceros de reflexión) se corresponden con puntos de
transmisión perfecta de H (s ) , es decir, H ( jω ri ) = 1.
El polinomio N (s ) es el numerador de H (s ) y el denominador de K (s ) por lo que sus
ceros son los ceros de transmisión de H (s ) , y a su vez, los polos de K (s ) .
La síntesis de la función de aproximación consiste en determinar una función racional
F ( s)
real K ( s ) = ε ⋅
tal que:
N ( s)
1. F (s ) tiene todas sus raíces en la banda pasante en el eje jω .
Métodos de Aproximación
3
2. N (s ) tiene todas sus raíces en la banda de rechazo en el eje jω .
3.
F ( jω )
N ( jω )
≤ 1 para 0 ≤ ω ≤ 1
4. K ( jω ) ≥ δ para ω ≥ ω s
Nota: Se supone el filtro está normalizado en frecuencia, es decir, el borde de la banda pasante
ω p está
en 1 rad/s. Las condiciones 1 y 2 conducen a las aproximaciones más efectivas, si bien otras
aproximaciones son posibles.
2.2. Filtros de Butterworth.
Si se desea una banda pasante máximamente plana, entonces forzamos a que K ( jω ) y
sus primeras derivadas sean nulas en el origen:
K ( j ⋅ 0) = 0
di
y
(dω )
2 i
K ( jω ) 2
⋅
=0
2
1 + K ( jω ) ω = 0
i = 1, 2...
(2.4)
Derivando e igualando a cero en el origen, se deduce que, para cumplir (2.4), todos los
ceros de reflexión deben estar en el origen, por tanto:
H ( jω ) =
1
2
1 + K ( jω )
2
N ( jω )
=
2
(2.5)
N ( jω ) + ε 2 ⋅ ω 2 n
2
Un caso especial que da lugar a los denominados filtros de Butterworth se tiene para
N ( jω ) = 1 , entonces:
H ( jω ) =
2
1
1 + ε ⋅ ω 2n
ε 2 = 100.1 Ap − 1
2
A s = −10 log10 (1 + ε ⋅ ω
2
2n
s
)
(2.6)
Despejando n de (2.6) se obtiene el orden del filtro
n≥
[
(
)]
log10 ε −2 ⋅ 100.1 As − 1
2 log10 ω s
(2.7)
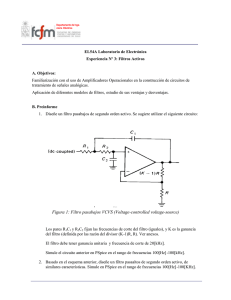
Factorizando H ( jω ) y reteniendo sólo los polos del semiplano real negativo queda:
pk = ε
−1
n
⋅e
j⋅
2 k + n −1
⋅π
2n
k = 1, 2...n
Es decir, los polos están uniformemente espaciados en la circunferencia de radio ε
separados 180º/n.
(2.8)
−1
n
y
Métodos de Aproximación
π
4
π
8
π
5
4
π
10
n=5
n=4
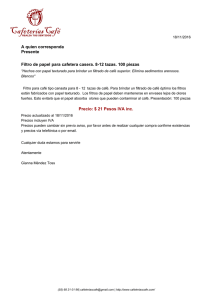
Figura 2.3. Posición de los polos en un filtro de Butterworth. a) número par de
polos, b) número impar de polos.
Los polinomios de Butterworth están tabulados para filtros con 3dB de tolerancia en la
banda pasante ( es decir, para ε = 1 en ω = 1 ).
2.3. Filtros de Chebyshev.
Es más eficiente repartir el error de aproximación de una forma continua a lo largo de la
banda pasante, lo que podemos conseguir escogiendo:
K ( jω ) = ε 2 ⋅ Cn2 (ω )
2
(2.9)
donde Cn (ω ) es un polinomio que oscila entre -1 y 1 para 0 ≤ ω ≤ 1 .
Si escogemos Cn (ω ) = cos (n Φ(ω )) con Φ(ω ) = arc cosω , tenemos los filtros
Chebyshev.
H ( jω ) =
2
1
1 + ε ⋅ Cn2 (ω )
de
(2.10)
2
De una manera general:
cos (n ⋅ arc cos ω )
C n (ω ) =
1
2
cos h (n ⋅ arc cos h ω ) = 2 ⋅ ω + ω − 1
(
) + (ω +
n
ω2 −1
Cn (ω ) también puede obtenerse mediante una fórmula recursiva g
)
−n
ω ≤1
ω >1
(2.10)
Métodos de Aproximación
C0 (ω ) = 1
C1 (ω ) = ω
C2 (ω ) = 2ω 2 − 1
Cn (ω ) = 2ω ⋅ Cn −1 (ω ) − Cn − 2 (ω )
5
(2.12)
Los polinomios denominadores de los filtros de Chebyshev y sus ceros se encuentran
tabulados para diferentes valores de ε y n .
Para determinar ε y n , de las especificaciones del filtro y de (2.10):
ε = 100.1 Ap − 1
y
10 log10
1
= As
1 + ε ⋅ Cn2 (ω s )
en dB
2
(2.13)
que se transforma en
(
)
0.1 As
− 1
4 100.1 As − 1
arc cos h 10
2
ln
ε
ε2
n≥
≅
arc cos h (ω s )
ln ω s + ω s2 − 1
(
(
)
)
(2.14)
También se puede determinar n a partir de gráficas normalizadas obtenidas por
diferentes valores de ε .
2.3.1. Filtros Inversos de Chebyshev
Si se desea una banda pasante monótona y una banda de atenuación con rizado
constante, entonces usaremos los denominados Filtros Inversos de Chebyshev, cuya
función característica viene dada por:
H ( jω )
2
( )
( )
ε 2 ⋅ Cn2 1ω
=
1 + ε 2 ⋅ Cn2 1
ω
(2.15)
donde se supone el filtro normalizado de manera que ω = 1 rad/s es el borde de la banda
de atenuación. Los filtros inversos de Chebyshev tienen una banda pasante
máximamente monótona y ceros de transmisión finita localizados en Cn 1ω = 0 .
( )
Los filtros inversos de Chebyshev son tan eficientes como los filtros directos de
Chebyshev en aproximar unas especificaciones de magnitud, pero su comportamiento en
fase y retraso es muy diferente. En general, los filtros inversos de Chebyshev tienen
factores de calidad de los polos menores que los filtros directos, por lo que tienen un
retraso más uniforme. Esto los hace preferibles en la realización de filtros de video y/o
datos en los que es importante obtener un retraso uniforme. Si las especificaciones de
retraso no son importantes se prefieren normalmente los filtros directos de Chebyshev.
Métodos de Aproximación
6
2.4. Filtros Elípticos (de Cauer).
Incluso mayor eficiencia puede obtenerse en el cumplimiento de las especificaciones de
magnitud, si el rizado se distribuye de manera equilibrada entre la banda pasante y la
banda de atenuación.
La derivación matemática de una función que cumple este requisito nos lleva a los
denominados filtros Elípticos (o de Cauer), donde:
K ( jω ) = ε 2 ⋅ Rn2 (ω )
2
2
2
ω
n ω − s
2
ω zi
R n (ω ) = k ⋅ Π⋅
si n es par
i =1
ω 2 − ω zi2
con
(2.16)
2
ωs
(n −1) ω 2 −
ω
2
zi
Rn (ω ) = k ⋅ ω ⋅ Π ⋅
si n es impar
2
2
1
=
i
ω − ω zi
k se escoge de manera que el máximo de Rn (ω ) en la banda pasante ( 0 ≤ ω ≤ 1) iguale la
ω
unidad. Es fácil ver que los ceros de reflexión ω ri = s y los ceros de transmisión ω zi
ω zi
son simétricos (en sentido geométrico) respecto de ω s , es decir, ω s = ω zi ⋅ ω ri .
ω sB
están
ω pB
tabulados en diferentes textos. La selección del orden del filtro a partir de las
especificaciones de magnitud se basa en expresiones muy complejas, por lo que en la
práctica se obtiene de monogramas o programas de ordenador.
Los polos y ceros de H (s ) para diferentes valores de rizado ε y Ω =
Ejemplo
Se pretende diseñar un filtro paso-bajo con las siguientes especificaciones:
Ap = 0.5dB de máxima atenuación
-Banda pasante: 0 ≤ f ≤ 1.2 kH z
-Banda de atenuación: f ≥ 192
. kH z As = 23 dB de mínima atenuación
Determinar el orden del filtro empleando una proximación de:
a) Butterworth
b) Chebyshev
c) Inversa de Chebyshev y
d) Elíptica
a) Aproximación de Butterworth
Métodos de Aproximación
7
Normalizando con la frecuencia patrón Ω0 = 2π ⋅ 1.2 kHz , ω p = 1 rad/s es ahora el
borde de la banda pasante y ω s =
1.92 kHz
= 1.6 rad/s el de la banda de atenuación.
1.2 kHz
ε = 100.1 Ap − 1 = 100.003 − 1 = 0.3493 y
n≥
log10
[ε (10
-2
0.1 As
2 log ω s
− 1)] log [8.196 (10
=
10
2.3
)] = 7.87
−1
2 log 6
(2.17)
⇒ n BUTT = 8
b) Aproximación de Chebyshev
(
n≥
)
0.1 As
−1
arc cos h 10
arc cos h ω s
ε ≅
2
(
)
0.1 As
−1
ln 4 10
ε 2 ≥ 3.82 ⇒
ln ω s + ω s2 − 1
(
)
n CHEB = 4
(2.18)
c) Aproximación Inversa de Chebyshev nINV _ CHEB = 4
d) Elíptico
De tabla o programa de ordenador, se deduce que es necesario un filtro de orden
n ELIP = 3.
Este efecto es aún más acusado para filtros de orden superior. Así, si repetimos el
ejemplo anterior con ω s = 11
. , hubiéramos obtenido:
nBUTT = 39, nCHEB = 10, nELIP = 4
(2.19)
Es evidente que los filtros elípticos son los más eficientes para la aproximación en
magnitud, luego los de Chebyshev y, por último, los de Butterworth.
En cuanto a las especificaciones de retraso, a igual orden del filtro, los polos del filtro
elíptico son los que tienen mayor factor de calidad, y por tanto, lo que presentan un
mayor pico en el retraso. Sin embargo, para igual eficiencia en especificación de
magnitud los órdenes son muy diferentes y puede ocurrir que el filtro elíptico tenga el
retraso más uniforme.
2.5. Filtros de Bessel-Thomson.
Los filtros anteriores se han diseñado con criterios de magnitud. La familia de filtros
denominados de Bessel-Thomson, son filtros que intentan aproximar un retraso
constante en la banda pasante.
Métodos de Aproximación
8
Empleando criterios máximamente planos en el retraso, Thomson supuso un conjunto
de filtro paso-bajo cuya función de transferencia es del tipo:
H (s ) =
bi =
2
b0
D (s )
n
;
D (s ) = ∑ bi ⋅ s i
(2.20)
i =0
(2n − i )!
! ⋅ i ! ⋅ (n − i )!
n −1
i = 0,..., n - 1
(2.21)
Para n elevados el retraso del filtro en la banda pasante aproxima una constante.
Los filtros de Bessel-Thomson se escogen en términos de error máximo en amplitud y
retraso en la banda pasante, bien mediante gráficas o tablas, bien mediante el empleo de
programas de síntesis.
2.6. Transformación de frecuencia.
A partir del diseño de un filtro paso-bajo, pueden obtenerse filtros paso-alto, paso-banda
y rechazo-banda que cumpla similares especificaciones, mediante el uso de
transformaciones. Denotemos ω y s la frecuencia y la variable del filtro paso-bajo
prototipo normalizado en ω p = 1 rad .
s
2.6.1 Paso-Bajo a Paso-Alto ( LP → HP ).
ω →
1
ω
s→
1
s
(2.22)
Ejemplo: Filtro de tercer orden de Chebyshev con 0.5dB de rizado en la banda pasante.
H LP (s ) =
0.716
;
s + 1.253s + 1.535s + 0.716
3
H HP (s ) =
2
1
s
s→
0.716 s 3
0.716 s 3 + 1.535s 2 + 1.253s + 1
(2.23)
(2.24)
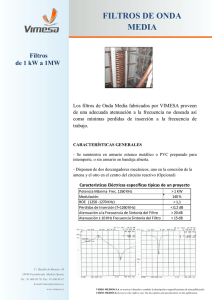
Claramente, una frecuencia característica que, originalmente, estaba en ω a ahora pasa a
estar en ω a = 1 ω a
Métodos de Aproximación
1.2
1.2
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
0.5
1
1.5
2
2.5
3
0
0
0.5
1
1.5
2
2.5
9
3
Figura 2.4. Transformación de filtro paso-bajo del ejemplo en filtro paso-alto.
2.6.2 Paso-Bajo a Paso-Banda ( LP → BP ).
En este caso se duplica el orden del filtro. Si
Ω 0 = Ω CH ⋅ Ω CL
(2.25)
es la frecuencia central del filtro, la transformación viene dada por:
Ω0 ω 2 − 1
ω→
;
⋅
ω
Β
Ω0 s 2 + 1
s→
;
⋅
Β
s
Β=Ω
CH
− Ω CL
(2.26)
Ω0
es el factor de calidad. Haciendo la transformación (2.26) al filtro pasoΒ
bajo de (2.23) nos queda:
donde Q =
H BP ( s ) =
0.716s 3
(2.27)
Q s + 1.253Q s + (3Q + 1.535Q )s + (2.506Q 2 + 0.716)s 3 + (3Q 3 − 1.535Q )s 2 + 1.253Q 2 s − Q 3
3 6
2 5
3
4
Una frecuencia característica que estaba originalmente en ω a ahora se desdobla en dos
frecuencias ω a1 ,ω a 2 tal que
2
ω
ω
Ω ω2 −1
ωa = 0 ⋅
→ ω a1,ω a 2 = a ± a − 1
ω
2Q
Β
2Q
(2.28)
Métodos de Aproximación 10
2.6.3 Paso-Bajo a Rechazo-Banda ( LP → BR ).
Nuevamente se duplica el orden del filtro. La transformación viene dada por:
ω =
ω
1
s
Β
; s= ⋅ 2
⋅ 2
ϕ s −1
Ω0 ω − 1
Ω0
Β
(2.29)
con una banda de rechazo Β = ΩCH − ΩCL
(2.30)
con
Q=
El filtro queda centrado en:
Ω0 = Ω CH ⋅ ΩCL
Una frecuencia característica ω a pasa a convertirse en un par ω a1 ,ω a 2 , tal que:
2
1
1
− 1
ω1a ,ω1b =
±
2Q ⋅ ω a
2Q ⋅ ω a
1.2
1.2
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
0.5
1
1.5
2
2.5
3
0
0
0.5
(2.31)
1
1.5
2
2.5
3
Figura 2.5. Transformación del filtro paso-bajo del ejemplo en filtro paso-banda y
rechazo-banda con Ω 0 = 1 y Q = 1.5
2.7. Diseño asistido por ordenador.
El diseño de las funciones de transferencia puede hacerse mediante las fórmulas
expuestas en este tema, mediante gráficas y tablas o, modernamente, mediante el uso de
programas de diseño de filtros, tales como MATLAB, SCILAB o FiltorX.
Referencias
[1] R. Schauman, M.S.Ghausi, K.R.Laker. “Design of Analog Filters: Passive, Active
RC and Switched Capacitor”. Prentice-Hall: 1990.
Métodos de Aproximación 11