Oscilaciones libres, amortiguadas y forzadas
Anuncio

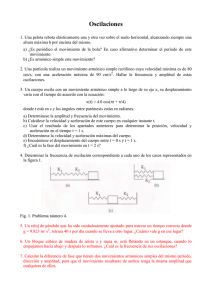
Introducción a la Fı́sica Experimental Guı́a de la experiencia Oscilaciones libres, amortiguadas y forzadas. Péndulo de Pohl. Departamento de Fı́sica Aplicada. Universidad de Cantabria. Febrero 28, 2005 Tenga en cuenta que la lectura previa de esta guı́a y la comprobación de las ecuaciones le llevará del orden de tres horas, incluyendo la consulta de las palabras clave, y que la lectura de la bibliografı́a especı́fica en inglés le llevará entre una y dos horas. Resumen Se describe cómo medir las oscilaciones libres, amortiguadas y forzadas de baja frecuencia producidas mediante un péndulo de torsión de Pohl. Un freno electromagnético simula diferentes medios viscosos. Un motor eléctrico suministra al oscilador una fuerza periódica que permite observar los fenómenos de resonancia cuando la frecuencia impulsora se aproxima a la frecuencia natural del oscilador. Introducción Se entiende por oscilación libre de una partı́cula (o sistema de partı́culas) un movimiento periódico de vaivén a uno y otro lado de una cierta posición central de equilibrio que, una vez iniciado, y caso de no haber rozamiento, nunca cesarı́a, manteniéndose siempre con la misma amplitud 1 . En las oscilaciones libres y sin rozamiento la energı́a mecánica total no varı́a. Las oscilaciones libres son, obviamente, un caso ideal, ya que en las oscilaciones reales siempre existe una cierta pérdida de energı́a mecánica, de modo que la amplitud de las oscilaciones va disminuyendo con el tiempo hasta que, finalmente, el oscilador se detiene. Se habla entonces de oscilaciones amortiguadas. Cuando se somete un sistema oscilante a amortiguamiento 1 Consulte y escriba la definición de todos los conceptos que aparecen en letra cursiva en este texto y que no estén previamente definidos. 1 (cualquiera que sea el mecanismo de amortiguación), se observa una disminución progresiva de la amplitud, disminución que será más o menos acentuada dependiendo de la intensidad del amortiguamiento. Se puede compensar el amortiguamiento de un sistema oscilante aportándole energı́a adicional . Se habla, entonces, de oscilaciones forzadas. Se entiende por oscilador forzado aquél que se encuentra sometido a la acción de una fuerza externa que le aporta energı́a neta. Si la fuerza externa es una fuerza impulsora y periódica (se puede tomar como ejemplo al niño en el columpio movido por pequeños impulsos), su efecto es suministrar energı́a al sistema oscilante con el fin de compensar las pérdidas por rozamiento o frenado, de modo que la amplitud de la oscilación permanezca constante o que incluso aumente, dependiendo de si la energı́a disipada es igual o inferior a la aportada, respectivamente. El péndulo de torsión de Pohl permite estudiar todas estas modalidades de oscilación. Está constituido por tres elementos básicos. (i) Un sistema oscilante, el péndulo de torsión propiamente dicho, es decir, un volante de cobre, con una escala graduada en unidades arbitrarias, unido a un resorte espiral de acero. (ii) Un freno electromagnético, colocado en la base del péndulo, que permite simular un medio viscoso (amortiguamiento) en cuyo seno oscila el péndulo. Está constituı́do por dos bobinas con núcleo y alimentadas por la fuente (1) de la figura (2) (electroimán). El funcionamiento de este freno está basado en la generación de corrientes de Foucault sobre el volante de cobre debidas al campo magnético que crea el electroimán. (iii) Un motor eléctrico que permite aplicar una fuerza periódica de frecuencia variable al péndulo, a través de una excéntrica y una palanca que lo conecta al resorte. a) Oscilaciones libres. Al desplazar el volante (disco) un cierto ángulo, φ, respecto de su posición de equilibrio, aplicándole un momento (de fuerza) externo, y dejarlo libre, actúa sobre él un momento de reacción elástica que obedece la ley de Hooke, ~ = −Dφ, M (1) siendo D la constante elástica del resorte. Este momento tiende a llevar el disco, de nuevo, a su posición inicial de equilibrio, estableciéndose ası́ un movimiento oscilatorio. Si se considera despreciable la fuerza de rozamiento con el aire y si no actúa ninguna fuerza de frenado (freno electromagnético desconectado), el momento recuperador, de acuerdo con la segunda ley de Newton para el movimiento de rotación, se puede escribir como 2 ~ = Id φ , M (2) d t2 2 siendo I el momento de inercia del disco respecto del eje de giro y t el tiempo. Igualando Ec. (1) y Ec. (2) , se obtiene la ecuación diferencial del movimiento, d2 φ D + φ = 0, (3) d t2 I caracterı́stica de un movimiento armónico simple. La solución de la ecuación (3) es de la forma φ(t) = φ0 cos(ω0 · t + ϕ) , (4) donde φ0 es la amplitud –máximo desplazamiento angular del disco respecto a su posición de equilibrio– y (ω0 · t + ϕ) es la fase. ϕ es la fase inicial, es decir, el valor del ángulo cuando t = 0 y ω0 es la frecuencia angular caracterı́stica, o recuencia angular propia del resorte que viene q dada por la expresión ω0 = D/I. Además, ω0 = 2π/T0 , siendo T0 el perı́odo propio del resorte. b) Oscilaciones amortiguadas. Cuando el sistema oscilante está amortiguado, se debe introducir en la Ec. (3) un término que dé cuenta del amortiguamiento. Para velocidades pequeñas, este término se puede considerar que es proporcional a la velocidad angular 2 , d φ/d t, es decir, MA = −2γI dφ , dt (5) siendo γ la constante de amortiguamiento. Ası́ la nueva ecuación diferencial del movimiento es, d2 φ dφ + 2γ + ω0 2 φ = 0 d t2 dt (6) La solución de la ecuación (6) viene dada por la función φ(t) = φ0 · exp(−γt)cos(ωA · t + ϕ) , (7) donde la frecuencia angular amortiguada es ωA = q ω02 − γ 2 . (8) c) Oscilaciones forzadas. Si se aplica al oscilador amortiguado un momento externo M (t), tal que M (t) = M0 cos(ωt), que le comunica energı́a periódicamente, la ecuación de movimiento es ahora, d2 φ dφ M0 + 2γ + ω02 φ = cos(ωt) . 2 dt dt I 2 (9) En otras situaciones fı́sicas se considera que el rozamiento es proporcional al cuadrado de la velocidad. En ambos casos, estos términos disipativos de la energı́a mecánica no se pueden justificar completamente utilizando sólo las ecuaciones de Newton. 3 (a) (b) (c) (d) Figura 1: Oscilaciones forzadas. La frecuencia propia del oscilador es de 3,16 rad s−1 . La constante de rozamiento es 0,200. (a) Frecuencia forzante aplicada ; 4 La solución de esta ecuación, en el estado estacionario, es de la forma φ(t) = φM cos(ωt − δ). Los valores de la amplitud φM y de δ, que es el desfase entre el momento impulsor que actúa sobre el sistema y la velocidad de éste, vienen dados, respectivamente, por las expresiones M0 /I φM = q (ω 2 − 2 ω02 ) ; tan δ = + 4ω 2 γ 2 2γω , − ω2 ω02 (10) y son función de la frecuencia angular ω del momento externo aplicado. Figura 2: Resonancia. La frecuencia propia del oscilador es de 3,16 rad s−1 y la constante de rozamiento es 0,0. Frecuencia forzante aplicada 3,16 rad s−1 . La amplitud φM alcanza su valor máximo para la frecuencia del momento externo q ωR = ω02 − 2γ 2 . (11) En estas condiciones se dice que existe resonancia en la amplitud. Reflexiones previas a la realización del experimento Antes de llevar a cabo las experiencias, considere las siguientes cuestiones: 1.- Defina: movimiento periódico, movimiento oscilatorio, movimiento armónico simple, frecuencia, oscilación de torsión, constante recuperadora. 2.- ¿Qué es el momento de un par? 3.- Distinga entre oscilaciones libre, amortiguada y forzada. Exprese matemáticamente las ecuaciones diferenciales del movimiento en los tres casos (consulte la bibliografı́a). ¿Qué se entiende por fenómeno de resonancia? ¿y por frecuencia de resonancia? 4.- ¿Cuantos tipos de energı́a puede identificar en un movimiento oscilatorio, por ejemplo, de un péndulo? ¿Y en un péndulo de torsión? 5 5.- De acuerdo con el principio de conservación de la energı́a, la energı́a total de un péndulo amortiguado se debe conservar. Entonces, la energı́a mecánica que se pierde en las oscilaciones reales debido al rozamiento, ¿en qué tipo de energı́a se transforma? 6.- Además de utilizando la Ec. (8), también se puede obtener γ a partir de la amplitud de dos oscilaciones sucesivas φn y φn+1 ocurridas en los tiempos t y t + T , respectivamente, donde T es el periodo. Explı́quelo. (a) (b) Figura 3: Péndulo de Pohl. (a) Volante de cobre con muelle espiral y motor con excéntrica. (b) Rectificador, amperı́metro y cronómetro. Descripción del material Para llevar a cabo este tipo de experiencias se utiliza el siguiente material (ver Figs. 3 y 4): 1. Péndulo de torsión: volante de inercia de cobre, el muelle espiral y una escala graduada [(4) en Fig. 4] 2. Freno electromagnético, bobinas con núcleo [(b) en Fig. 4]. 3. Motor con excéntrica [(e) y (m) en Fig. 4]. 4. Fuente de alimentación regulable (suministra intensidad de corriente al motor y al freno electromagnético) [(1) en Fig. 4]. 5. Rectificador de corriente [(2) en Fig. 4]. 6. Miliamperı́metro [(3) en Fig. 4]. 7. Reloj digital de precisión 0,01 s [(5) en Fig. 4] 8. 2 cables largos (fuente-motor), 2 cables medianos (fuente-rectificador), 3 cables cortos (rectificador-electroimán-miliamperı́metro) 6 (4) (1) (rm) (re) (2) (3) (m) (b) (e) (5) Figura 4: Montaje experimental del péndulo de Pohl. (1) Fuente de alimentación regulable, (rm) regulador del motor, voltaje e intensidad, (re) regulador del electroimán; (2) rectificador; (3) miliamperı́metro, máximo 1 A; (4) péndulo de Pohl, resorte espiral (con indicador de la desviación), disco de cobre, escala circular, electroimán (e) y motor forzante (m), con ajuste fino y ajuste grueso, varilla impulsora y rueda de impulsión con excéntrica. Modo operativo a) Oscilaciones libres. Mantenga desconectado el freno electromagnético y el motor. Ası́, el péndulo oscilará libremente (supuesto despreciable el rozamiento con el aire). Antes de proceder a medir, es interesante estimar tanto el perı́odo como la frecuencia del péndulo en oscilaciones libres. Para ello, lleve a cabo una estimación previa del perı́odo T del péndulo de torsión y de su posible dependencia con la amplitud. Desplace la flecha del mismo hasta un cierto ángulo, suéltela y mida lo que tarda en volver a la posición inicial. Estime la velocidad angular ω. Haga las mismas estimaciones para diversos ángulos iniciales. Si para distintas amplitudes –esto es, ángulos iniciales de diferentes radianes–, el tiempo empleado en llevar a cabo una oscilación es –prácticamente– el mismo, y siendo la velocidad angular el ángulo dividido por el tiempo que se tarda en recorrerlo, ¿cómo es que la velocidad angular del péndulo en oscilación libre es sólo una? Para obtener la posición angular, φ(t), determine la amplitud del desplazamiento angular, φ0 , la fase inicial, ϕ, y el periodo de oscilación, T0 (mida para ello 10 oscilaciones completas). A partir del perı́odo se puede obtener ω0 en rad s−1 . Derivando la Ec. (4) con respecto al tiempo, se obtiene la velocidad angular, d φ/d t, y derivando ésta, de nuevo, con respecto al tiempo se obtiene la aceleración angular, d2 φ/d t2 . 7 Represente gráficamente las tres funciones, posición, velocidad y aceleración angulares en función de t. ¿Cuál es la caracterı́stica más destacable de las gráficas φ(t), ω(t) y α(t)? b) Oscilaciones amortiguadas. Conecte, ahora, el freno electromagnético con ayuda del profesor. De esta manera podrá simular diferentes medios viscosos en los cuales oscila el péndulo. Determine ωA , para obtener, con ayuda de la Ec. (8), la constante de amortiguamiento γ.Cada intensidad i impuesta al motor dará lugar a un valor de la constante de amortiguamiento γ diferente. Realice el experimento para valores 4, 6, 8 y 10 V (voltios) del potencial V de la fuente de alimentación y anote las correspondientes lecturas de la intensidad i. Para cadapar de valores (V , i), determine el perı́odo de oscilación TA que puede relacionar con ωA (ωA = 2π/TA ). Anote los resultados y haga una representación gráfica de la amplitud de la oscilación en función del tiempo. Esto permitirá obtener la constante de amortiguamiento, γ. c) Oscilaciones forzadas. Manteniendo activado el amortiguamiento como en la parte b), conecte el motor a la salida DC de la fuente de alimentación (consulte con el profesor) con el fin de aplicar un momento externo periódico M (t) = M0 cos(ωt), que compense la pérdida de energı́a. La frecuencia ω puede controlarse actuando sobre los botones de control grueso y fino del motor. De nuevo, antes de medir, proceda a estimar la posición de la frecuencia forzante, de tal forma que la medida experimental de la misma no le sorprenda. Puesto que ya conoce la frecuencia propia del péndulo, si mide el número de vueltas que da la rueda del mecanismo forzante por segundo en diversas posiciones, ¿cómo podrı́a estimar en qué posición va a encontrar la frecuencia de resonancia? Determine, ahora, experimentalmente, el valor de la frecuencia de resonancia ωR para cada valor del amortiguamiento que se ha determinado, es decir, para cada par de valores (V , i), utilizado en el apartado b). Los valores obtenidos deberán coincidir con los hallados a través de la Ec. (11). Para ello, debe encontrar la frecuencia del motor utilizando un cronómetro y contando el número de vueltas del motor. Comience por una frecuencia pequeña e increméntela mediante el potenciómetro acoplado al motor. En las proximidades de la frecuencia de resonancia, controle la variación la frecuencia mediante el ajuste fino (fine). Las lecturas, en cualquier caso, debe realizarlas cuando la amplitud del péndulo se estabilice. Las curvas que representan la amplitud del oscilador en función de la frecuencia del momento periódico aplicado se denominan curvas de resonancia. 8 Para los valores anteriores de i, represente gráficamente la amplitud φM frente a la frecuencia del motor ω. Compare estos resultados con los resultados obtenidos a partir de la Ec. (11). Elabore las tablas, los gráficos y el cálculo de errores según las normas. Elabore el informe correspondiente a este experimento según las normas. Preguntas adicionales relacionadas con la experiencia 1.- El cobre no es un material magnético. ¿Cómo funciona el mecanismo de amortiguación entre el electroimán de núcleo de hierro y el disco de cobre unido al resorte espiral? 2.- ¿Qué sucede cuando la frecuencia del motor coincide con la de resonancia y la constante γ = 0? 3.- ¿Qué diferencia se observa en el comportamiento del péndulo para valores grandes y pequeños de γ? 4.- Indique algunos ejemplos en los que el fenómeno de la resonancia se ponga de manifiesto. Referencias [1] R.A. Serway y J.W. Jewett, Jr., Ed. Thomson, Fı́sica 1, 3a Edición, Madrid, pág. 419 y ss. [2] R.A. Serway, Ed. McGraw-Hill, Fı́sica 1, 2a Edición, México, pág. 348 y ss. [3] P.A. Tipler, Fı́sica para la ciencia y la tecnologı́a, 4a Edición, Barcelona, Vol. 1, pág. 403 y ss. [4] E. C. Crittenden, Jr., An advanced laboratory experiment on force damped oscillations, Am. J. Phys. 11, 282-286 (1943). [5] G Wilkering, J Hesse, Electrical pendulum for educational purpose, Am. J. Phys. 49, 90-92 (1981). 9