Métodos Clásicos de Optimización para Problemas No
Anuncio

Métodos Clásicos de Optimización para Problemas
No-Lineales sin Restricciones
Dr. Gonzalo Hernández Oliva
UChile - Departamento de Ingeniería Matemática
07 de Mayo 2006
Abstract
En este apunte veremos una breve descripción de la teoría y métodos que
se utilizan para enfrentar problemas de optimización no-lineales sin restrcciones.
La no presencia de restricciones puede ser vista en un comienzo como una grave
limitación, sin embargo, la razón del porque dedicamos tiempo a resolver este
tipo de problemas desde el punto de vista de la optimización, es que existe toda
una metodología que permite tratar problemas de optimización no-lineales con
restriccciones como problemas de optimización no-lineales sin restricciones: Los
Métodos de Penalización.
1
Introducción
Nos interesa resolver el problema siguiente:
Dada f : Rn → R, campo escalar 2 veces diferenciable con continuidad,
encontrar x ∈ Rn , solución de:
min f (x)
x∈Rn
(POSR)
Encontrar una solución de este problema corresponde a encontrar un punto x que
satisface:
f (x) ≤ f (x)
∀x ∈ Rn
Este punto x se denomina mínimo global de f sobre Rn .
Desde un punto de vista práctico, encontrar el mínimo o máximo global de una
función no-lineal cualquiera es un problema abierto en matemáticas. Los métodos
existentes sólo obtienen mínimo locales.
1
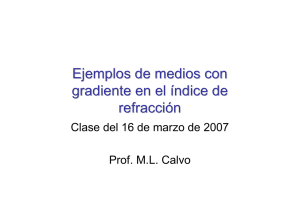
Definición 0: Un punto x es un mínimo local de f en Rn si existe r > 0 talque:
f (x) ≤ f (x)
para kx − xk ≤ r
El mínimo global de f será el mínimo local de menor valor de la función objetivo.
Figura 1. Mínimos locales de una función de 2 variables
Desde un punto de vista teórico, las condiciones más generales para que x sea mínimo
local de f son las siguientes:
Teorema 1: Un punto x es mínimo local de f si se verifican las siguientes condiciones:
1) x es un punto estacionario de f
⎡
⎢
⎢
−
→
∇f (x) = 0 ⇐⇒ ⎢
⎢
⎣
∂f (x)
∂x1
∂f (x)
∂x2
..
.
∂f (x)
∂xn
⎤
⎡
⎥ ⎢
⎥ ⎢
⎥=⎢
⎥ ⎣
⎦
⎤
0
0
..
.
⎥
⎥
⎥
⎦
0
2) La matriz hessiana ∇2 f (x) de f en x es definida positiva:
⎡
⎢
⎢
⎢
∇2 f (x) = ⎢
⎢
⎣
∂ 2 f (x)
∂x21
∂ 2 f (x)
∂x1 ∂x2
..
.
∂ 2 f (x)
∂x1 ∂x2
∂ 2 f (x)
∂x22
..
.
∂ 2 f (x)
∂x1 ∂xn
2
∂ 2 f (x)
∂x2 ∂xn
···
···
..
.
···
∂ 2 f (x)
∂x1 ∂xn
∂ 2 f (x)
∂x2 ∂xn
..
.
∂ 2 f (x)
∂x2n
⎤
⎥
⎥
⎥
⎥
⎥
⎦
Dem: Se demuestra mediante la aproximación de Taylor de 2◦ Orden de la función f
en torno a x.¥
Entonces, para obtener el mínimo local se debe resolver un sistema de ecuaciones no
lineales, en general complejo. Surge de esta forma la necesidad de aplicar métodos
numéricos.
Consideraremos métodos numéricos llamados de descenso, que pueden ser clasificados
en 3 grupos:
⎧
⎪
⎪
⎪
⎪
Primer Orden
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎨
Métodos Descenso
Segundo Orden
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩ Cuasi-Newton
⎧
⎨ Método del Gradiente y Variedades
Método del Gradiente Conjugado
⎩
Método de Fletcher-Reeves
½
½
Métodos de Newton
Variedades
DFP: Davidon - Fletcher - Powell
BFGS
Todos los métodos numéricos que se utilizan en la actualidad reducen este problema
a una secuencia de problemas unidimensionales.
2
Método de Gradiente o de Cauchy
Sea f : Rn → R diferenciable. La derivada direccional de f en la dirección d ∈ Rn
está dada por:
Df (x; d) = ∇f (x)t d
Para obtener la dirección de máximo descenso de la función f en un punto x ∈ Rn
tal que ∇f (x) 6= 0, se debe resolver el problema:
min ∇f (x)t d
d∈Rn
kdk2 = 1
La solución de este problema es:
d=−
∇f (x)
k∇f (x)k
Y por lo tanto la dirección de máximo descenso de la función f es:
d = −∇f (x)
3
Definición 2: El vector d ∈ Rn es una dirección de descenso de f , función diferenciable, en el
punto x ∈ Rn si:
∇f (x)t · d < 0 ⇐⇒ (−∇f (x))t · d > 0
A través del método del gradiente, se busca definir una sucesión de puntos que tenga
la dirección de máximo descenso de la función f .
Definición 3: Las curvas de nivel θ de f están definidas por:
ϕ(f, θ) = {x ∈ Rn tal que: f (x) = θ}
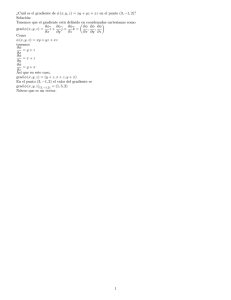
Lema 4: Sea d ∈ Rn una dirección de descenso de la función f en el punto x. Se define
la función unidimensional:
hx,d : R+ → R
α → hx,d (α) = f (x + αd) − f (x) para x, d ∈ Rn fijos
Luego, si α minimiza hx,d sobre R+ , entonces:
hx,d (α) < hx,d (α = 0) = 0 ⇔ f (x + αd) < f (x)
donde α verifica:
h0x,d (α) = 0 ⇐⇒ ∇f (x + αd)t d = 0
Dem: Directa de las definiciones hechas para hx,d .¥
hx,d(0)
_
_
α1
α2
α
hx,d(α ) = f( x + αd ) - f(x)
para d dirección de descenso
hx,d(α)
Figura 2. Función Unidimensional hx,d
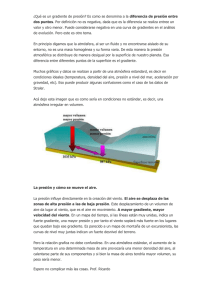
De acuerdo a los resultados anteriores, se define la iteración canónica del Método del
Gradiente o Máximo Descenso, según:
4
METODO DEL GRADIENTE O MAXIMO DESCENSO
Etapa 0:
Etapa 1:
Etapa 2:
Seleccionar un punto inicial x0 ∈ Rn
k=0
Calcular ∇f (xk )
Si k∇f (xk )k = 0 =⇒ ST OP
Si no, seguir a Etapa 2.
k
d = −∇f (xk )
Calcular: αk solución del problema uni-dimensional:
minhxk ,dk (α) = f (xk + αdk ) − f (xk )
α≥0
xk+1 = xk + αk dk
k = k + 1 y volver a Etapa 1.
Curvas de Nivel de f
f(x2)
f(xo)
do
d1
f(x1)
Figura 3. Esquema iteración del método del Gradiente
Ejemplo: Se quiere resolver el problema de optimización bi-dimensional, ver ref. [1]:
min
(x1 ,x2 )∈R2
(x1 − 2)4 + (x1 − 2x2 )2
En la siguiente tabla se muestran 7 iteraciones del método del gradiente a partir
de x0 = (0.00, 3.00)
°
°
°∇f (xk )°
k
xk
f (xk )
∇f (xk )
αk
0 (0.00, 3.00) 52.00 (−44.00, 24.00)
50.12
0.062
1 (2.70, 1.51) 0.34
(0.73, 1.28)
1.47
0.24
2 (2.52, 1.20) 0.09
(0.80, −0.48)
0.93
0.11
3 (2.43, 1.25) 0.04
(0.18, 0.28)
0.33
0.31
4 (2.37, 1.16) 0.02
(0.30, −0.20)
0.36
0.12
5 (2.33, 1.18) 0.01
(0.08, 0.12)
0.14
0.36
6 (2.30, 1.14) 0.009
(0.15, −0.08)
0.17
0.13
7 (2.28, 1.15) 0.007
(0.05, 0.08)
0.09
5
Observaciones:
1) En cada etapa αk , llamado el paso del método en la etapa (k + 1)-ésima, debe
verificar:
∇f (xk + αdk ) · dk = 0
que en general será una ecuación difícil de resolver exactamente en α. Por esta
razón se utilizan pasos αk que serán aproximaciones del paso exacto, determinados por algún método de elección de paso, como se verá más adelante.
2) Dadas las condiciones de optimalidad sobre f (i.e. existencia única de la solución del problema (P)) se tiene que el método posee una convergencia global,
i.e. para cualquier punto inicial la iteración del método converge, a la solución
de (POSR).
3) La rapidez de convergencia del método es lineal: Si xk es la sucesión de puntos
determinados por el método del gradiente, se tiene que ∃λ ∈ (0, 1) tal que:
¯
¯
¯
¯
¯ k
¯ k+1
¯
¯
− x¯ ≤ λ ¯x − x¯
¯x
donde x es un punto estacionario de f : ∇f (x) = 0. Este punto estacionario
depende el punto inicial utilizado.
4) Dos direcciones consecutivas generadas por el método del gradiente son ortogonales, ver figura 3. En efecto: supongamos que estamos en la iteración k + 1 del
método; la determinación del paso exacto αk obtiene el hecho anterior, pues:
αk = arg minf (xk + αdk )
α≥0
Ahora bien, si αk = 0, significa que estamos en el óptimo en xk y el método
finaliza. Si αk > 0, αk debe verificar la ecuación:
¯
df (xk + αdk ) ¯¯
= 0 ⇔ ∇f (xk +αk dk )t dk = 0 ⇔ ∇f (xk )t dk = −(dk+1 )t dk = 0
¯
dα
α=αk
5) Se llama método del gradiente o de Cauchy, o de máximo descenso, a la iteración
del método anterior con la elección del paso αk exacto.
6) Existen otros métodos de gradiente que no consideran la elección del paso exacto, sino que un paso elegido según reglas que dan una buena aproximación
del paso exacto; o que consideran un paso constante para todas las iteraciones.
Luego, en general, se considera un algoritmo del gradiente con elección de paso
variable según algún criterio:
½ 0
x ∈ Rn
dk = −∇f (xk ) , λk ≥ 0
xk+1 = xk + λk dk
6
3
Métodos de Direcciones Conjugadas
Por tener velocidad lineal, la convergencia del método del gradiente es lenta, aún en
el caso de funciones cuadráticas. Luego, se busca un método de convergencia más
rápida. Una manera posible de acelerar esta convergencia es utilizar la noción de
direcciones conjugadas u ortogonales.
3.1
Método del Gradiente Conjugado
Sea (PC) el problema de optimización cuadrático definido por:
1
min q(x) = xt Qx − bt x
2
donde Q es una matriz definida positiva
x∈Rn
(PC)
Definición 5: Un conjunto de direcciones {d1 , ..., dk } de Rn , no nulas; k ≤ n se dirá Qconjugado 2 a 2 si:
½
1 si i = j
i t
j
(d ) Qd = δ ij
i, j = 1, ..., k
donde δ ij =
0 en otro caso
Por ejemplo, si Q = I, las direcciones son ortonormales.
Proposición 6: Si {d1 , ..., dk } es un conjunto Q-conjugado, entonces {d1 , ..., dk } es de rango
máximo, i.e. los vectores di son linealmente independientes.
Dem: En efecto, sean αi ∈ R; i = 1, ..., k, tal que:
k
X
αi di = 0
i=1
premultiplicando por (dj )t Q 6= 0, se tiene que:
k
X
αi (dj )t Qdi =
i=1
k
X
αi δ ij = αj
i=1
∀j = 1, .., k
Luego αj = 0 ∀j = 1, ..., k.¥
El método de direcciones conjugadas para (PC), suponiendo que no se tienen las
direcciones conjugadas ya calculadas, es el siguiente:
7
METODO DEL GRADIENTE CONJUGADO
Etapa 1:
Seleccionar un punto inicial x0 ∈ Rn
k=0
g 0 = ∇q(x0 ) = Qx0 − b
d0 = −∇q(x0 )
Etapa 2:
(g k )t dk
(dk )t Qdk
k+1
x °= xk + αk°dk
Si °xk+1 − xk ° ≈ 0 =⇒ ST OP
Si no, seguir a Etapa 2.
Etapa 0:
αk = −
g k+1 = ∇q(xk+1 ) = Qxk+1 − b
(g k+1 )t Qdk
ρk =
(dk )t Qdk
k+1
d
= −g k+1 + ρk dk
k = k + 1 y volver a Etapa 1.
Teorema 7: El método del gradiente conjugado es un método de direcciones conjugadas. Si
no termina en xk , entonces:
i) hg 0 , ..., g k i = hg 0 , Qg 0 , ..., Qk g 0 i
ii) hd0 , ..., dk i = hg 0 , Qg 0 , ..., Qk g 0 i
iii) (dk )t Qdi = 0
∀ i = 0, ..., k − 1
iv) αk =
(g k )t g k
kg k k2
=
(dk )t Qdk
kdk k2Q
v) ρk =
(g k+1 )t g k+1
kg k+1 k2
=
(g k )t g k
kg k k2
Dem: La demostración se deja propuesta. Se puede ver en refs. [1, 2]¥
Observación:
Como las direcciones conjugadas son Q-ortogonales entre si, el método del gradiente conjugado converje en a lo más n iteraciones.
3.2
Método de Fletcher-Reeves
Corresponde a la versión del método del gradiente conjugado en el caso de una función
f general. La iteración se define de la siguiente manera:
8
METODO DE FLETCHER-REEVES
Etapa 0:
Etapa 1:
Seleccionar un punto inicial x0 ∈ Rn
k=0
d0 = −∇f (x0 )
Calcular αk solución del problema unidimensional:
αk = arg minf (xk + αdk )
α≥0
Etapa 2:
xk+1°= xk + αk°dk
Si °xk+1 − xk ° ≈ 0 =⇒ ST OP
Si no, seguir a Etapa 2.
Calcular ∇f (xk+1 )
∇f (xk+1 )t ∇f (xk+1 )
ρk =
∇f (xk )t ∇f (xk )
k+1
= −∇f (xk+1 ) + ρk dk
d
k = k + 1 y volver a Etapa 1.
Ejemplo: Volviendo al problema de optimización bi-dimensional anterior, ver ref. [1]:
min
(x1 ,x2 )∈R2
(x1 − 2)4 + (x1 − 2x2 )2
En la siguiente tabla se muestran 3 iteraciones del método de Fletcher-Reeves
a partir de x0 = (0.00, 3.00)
°
°
°∇f (xk )°
k
xk
f (xk )
∇f (xk )
αk
0 (0.00, 3.00) 52.00 (−44.00, 24.00)
50.12
0.062
1 (2.54, 1.21)
0.10
(0.87, −0.48)
0.99
0.11
2 (2.25, 1.10) 0.008
(0.16, −0.20)
0.32
0.10
3 (2.19, 1.09) 0.0017
(0.05, −0.04)
0.06
0.11
4
Métodos Aproximados de Elección de Paso
Su utilizan para lograr una buena elección del paso en cada iteración de un método de
optimización como alternativa a la determinación del paso exacto. Sea k la iteración
de un método de optimización cualquiera y se quiere determinar un paso para la
sucesión minimizante:
xk+1 = xk + tk dk
Donde tk ≥ 0, dk es una dirección de descenso en xk de la función objetivo f , i.e:
(−∇f (xk ))t dk > 0
La idea del algoritmo para determinación del paso tk , será calcular un intervalo [tg , td ],
0 ≤ tg ≤ td en el cual se pueda escoger tk ∈ [tg , td ] y se asegure una buena elección
en todo el intervalo.
9
ALGORITMO GENERAL DE CÁLCULO DE PASO
Etapa 0:
Etapa 1:
Etapa 2:
Inicialmente tg = td = 0. Sea t > 0 un paso tentativo
inicial.
Analizamos t:
- Si el criterio (a) se satisface: tk = t
- Si el criterio (b) se satisface entonces el paso t es
muy grande. Se define td = t, y se sigue a la etapa 2.
- Si criterio (c) se satisface entonces el paso t es muy
pequeño. Se define tg = t, y se sigue a la etapa 2.
Nuevo paso tentativo:
- Si td = 0, se define un nuevo t, mayor que tg :
t = 10tg
Y se vuelve a la etapa 1.
- Si td 6= 0, se define un nuevo t en el intervalo (tg , td ).
La elección más utilizada es:
tg + td
t=
2
Y se vuelve a la etapa 1.
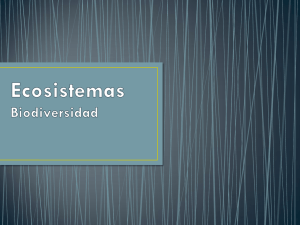
La Regla de Goldstein determina los criterios (a), (b) y (c) en el algoritmo general
de determinación de paso. Sea:
h(t) = f (xk + tdk ) − f (xk ) Para t ≥ 0
se tiene que:
h0 (t) = ∇f (xk + tdk )t dk
h0 (0) = ∇f (xk )t dk < 0
h(t) ≤ 0
h(0)
tg
td
t
t h'(0)m1
t h'(0)
t h'(0)m2
h(t)
Figura 4. Regla de Elección de Paso de Goldstein
10
REGLA DE GOLDSTEIN
Sean 0 < m1 < m2 < 1. Los criterios (a),(b) y (c) según esta regla son:
Criterio (a):
Criterio (b):
Criterio (c):
m2 h0 (0)t ≤ h(t) ≤ m1 h0 (0)t
h(t) > m1 h0 (0)t
h(t) < m2 h0 (0)t
En la práctica, se prueba con distintos valores para m1 y m2 .
5
Métodos de 2o Orden: Newton - Kantorovich
El método de Newton es un método numérico que se utiliza para encontrar ceros de
una función. Sea F : Rn → Rn un campo vectorial de clase ζ 1 (Rn ). Un punto x ∈ Rn
será un cero de F si:
F (x) = 0
El método de Newton para este problema es el siguiente:
METODO DE NEWTON-KANTOROVICH
Etapa 0:
Etapa 1:
Etapa 2:
Seleccionar un punto inicial x0 ∈ Rn
k=0
Calcular
F°(xk )
°
k
°
Si F (x )° ≈ 0 =⇒ ST OP
£
¤−1
Si no, calcular ∇F (xk ), ∇F (xk )
y seguir a Etapa 2.
Calcular:
£
¤−1
xk+1 = xk − ∇F (xk )
F (xk )
k = k + 1 y volver a Etapa 1.
Este método se puede aplicar a la búsqueda de los ceros del gradiente de una función f : Rn → R, suficientemente regular. Es decir, se buscan los puntos estacionarios
de f .
METODO DE OPTIMIZACION DE NEWTON
Etapa 0:
Etapa 1:
Etapa 2:
Seleccionar un punto inicial x0 ∈ Rn
k=0
Calcular
∇f°(xk )
°
°
Si ∇f (xk )° ≈ 0 =⇒ ST OP
£
¤−1
Si no, calcular ∇2 f (xk ), ∇2 f (xk )
y seguir a Etapa 2.
Calcular:
£
¤−1
∇f (xk )
xk+1 = xk − ∇2 f (xk )
k = k + 1 y volver a Etapa 1.
11
Ejemplo: En la tabla siguiente se aplica el método de Newton al problema de optimización
bi-dimensional a partir de x0 = (0.00, 3.00), ver ref. [1]:
min
(x1 ,x2 )∈R2
(x1 − 2)4 + (x1 − 2x2 )2
k
xk
f (xk )
∇f (xk )
0
(0.00, 3.00)
52.00
(−44.00, 24.00)
1
2
(0.67, 0.33)
(1.11, 0.56)
3.13
0.63
(−9.39, −0.04)
(−2.84, −0.04)
3
(1.41, 0.70)
0.12
(−0.80, −0.04)
4
(1.61, 0.80)
0.02
(−0.22, −0.04)
5
(1.74, 0.87)
0.005
(−0.07, −0.00)
2
k
∙ ∇ f (x ) ¸
50.0 −4.0
−4.0 8.0
∙
∙
23.23 −4.0
−4.0 8.0
∙
∙
∙
11.5 −4.0
−4.0 8.0
6.18 4.0
−4.0 8.0
3.83 −4.0
−4.0 8.0
2.81 −4.0
−4.0 8.0
¸
¸
¸
¸
¸
£
¤−1
− ∇2 f (xk )
∇f (xk )
(0.67, −2.67)
(0.44, 0.23)
(0.30, 0.14)
(0.20, 0.10)
(0.13, 0.07)
(0.09, 0.04)
Observaciones:
1) La dirección del Método de Newton:
h
i−1
∇f (xk )
dk = − ∇2 f (xk )
es una dirección de descenso si y sólo si: ∇2 f (xk ) es definida positiva, es decir:
(−∇f (xk ))dk > 0 ⇐⇒ ∇2 f (xk ) es definida positiva
(1)
2) El método de Newton en cada iteración, considera una aproximación cuadrática
de la función objetivo, y define el nuevo punto de la sucesión minimizante como
el óptimo de la aproximación cuadrática de la función objetivo. Cerca de un
óptimo local de f , la aproximación exacta.
3) El punto inicial x0 no puede ser arbitrario, ya que para que el método converja,
la dirección dk debe ser de descenso. Esta corresponde a la principal desventaja
12
del método: su convergencia local. Sin embargo, su rapidez de convergencia es
su mayor ventaja, posee convergencia de velocidad cuadrática, es decir:
kxk+1 − xk ≤ λkxk − xk2
para λ < 1
4) El principal problema del Método de Newton es que la matriz ∇2 f (xk ) debe
ser definida positiva. Si se parte de un punto x0 suficientemente cercano a un
mínimo local, esto se verifica. En general se desconoce toda información acerca
de la solución óptima del problema, y por lo tanto no se tiene un buen criterio
para escoger x0 .
5) Esto sugiere, que un buen método de minimización es una combinación del
Método del Gradiente y del Método de Newton: Inicialmente se aplica el
Método del Gradiente que tiene convergencia global de velocidad lineal y luego
se aplica el Método del Newton que tiene convergencia local de velocidad
cuadrática.
6
Métodos Cuasi-Newton
En cada iteración del método de Newton es necesario calcular la inversa de la matriz
hessiana de f en xk de manera exacta, lo que es costoso computacionalmente, O(n3 )
operaciones aritméticas. Por esto razon, se propone un método iterativo de la forma:
xk+1 = xk − tk S k g k
g k = ∇f (xk )
(2)
£
¤−1
donde S k es una matriz que aproxima a ∇2 f (xk )
y tk ≥ 0 minimiza f sobre
k
k
x − λg para λ ≥ 0 (paso exacto o aproximado).
Se presentarán 2 métodos que permiten construir iterativamente la matriz S k de
manera que se verifiquen las siguientes condiciones:
i) Definida Positiva: Si S k es definida positiva =⇒ S k+1 también lo es
£
¤−1
ii) Aproximación de la matriz hessiana inversa de f : xk −→ x , S k −→ ∇2 f (x)
para k −→ ∞.
La forma de construir estos métodos asegura:
• Convergencia Global
• Rapidez de convergencia mayor que lineal
• Convergencia a un mínimo local
13
METODO DFP (Davidon-Fletcher-Powell)
Etapa 0:
Etapa 1:
Etapa 2:
Seleccionar un punto inicial x0 ∈ Rn
Inicializar S0 = In×n
k=0
k
k
Calcular
° k ° g = ∇f (x )
°
°
Si g ≈ 0 =⇒ ST OP
Si no, calcular xk+1 = xk − tk S k g k
donde tk ≥ 0 se escoge según regla de Goldstein
y seguir a Etapa 2.
Calcular:
pk = xk+1 − xk q k = g k+1 − g k
pk (pk )t S k q k (q k )t S k
S k+1 = S k + k t k −
(p ) q
(q k )t S k q k
k = k + 1 y volver a Etapa 1.
METODO BFGS (Broyden-Fletcher-Goldfarb-Shanno)
Etapa 0:
Etapa 1:
Etapa 2:
Seleccionar un punto inicial x0 ∈ Rn
Inicializar S0 = In×n
k=0
k
k
Calcular
° k ° g = ∇f (x )
Si °g ° ≈ 0 =⇒ ST OP
Si no, calcular xk+1 = xk − tk S k g k
donde tk ≥ 0 se escoge según regla de Goldstein
y seguir a Etapa 2.
Calcular:
pk = xk+1 − xk q k = g k+1 − g k
£ k k t t
¤
¸
∙
p (q ) S + S k q k (pk )t
(q k )t S k q k pk (pk )t
k+1
k
S
=S + 1+
−
(pk )t q k
(pk )t q k
(pk )t q k
k = k + 1 y volver a Etapa 1.
References
[1] M. Bazaraa, H. D. Sherali and C. M. Shetty, Nonlinear Programming: Theory
and Algorithms, Second Edition, John Wiley and Sons, 1993.
[2] D. G. Luenberger, Linear and Nonlinear Programming, Second Edition, John
Wiley and Sons, 1984.
14