Modelado
Anuncio

Capítulo 3. Modelado de aeronaves
Capítulo 3. Modelado de aeronaves
3.1 Introducción
En el contexto de la Ingeniería, modelar consiste en crear una representación matemática de
un sistema real de forma que, con cierto nivel de exactitud, puedan reproducirse y predecirse
los comportamientos del mismo. No hay que olvidar que un modelo no es más que una
aproximación al mundo real que es siempre demasiado complejo para ser contemplado en su
totalidad. Además, en función de la aplicación, un modelo demasiado detallado puede ser
contraproducente, pues supone un gran costo de desarrollo y computación que puede no
aporta información relevante para el caso a estudio.
La importancia de los modelos en el mundo de la aeronáutica en general, y para los UAS en
particular depende de tres puntos:
-
-
Permiten determinar las actuaciones (performance) del aparato, de forma que es
crucial en el proceso de diseño o rediseño (modificaciones, cargas de pago
específicas…)
Pueden ser empleados para desarrollar algoritmos de control mediante técnicas de
control basado en modelo, tales como el control predictivo, pole placement…
Permiten realizar simulaciones que ayudan tanto al entrenamiento de pilotos como al
ajuste y validación del sistema de control de vuelo (FCS, Flight Control System). Esto
resulta de vital importancia, ya que el coste de realizar ensayos en vuelo, así como el
riesgo que supone testar por primera vez un complejo entramado de hardware,
algoritmos de estimación, algoritmos de control es elevadísimo
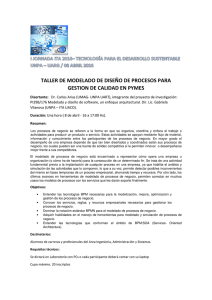
3.2 Sistemas de referencia
Para describir el movimiento de la aeronave es necesario empelar diferentes sistemas de
coordenadas, ya que diferentes variables se proyectan con mayor facilidad sobre
determinados ejes. Los más relevantes son (Pamadi 2004):
-
-
Sistemas ECEF (Earth Centered Eath Fixed):
sistema con origen en el centro
de masas de la Tierra y que se mueve solidariamente a él. El eje x coincide con la
intersección entre el meridiano de Greenwich y el ecuador y el eje z con el de rotación
terrestre.
Sistema ejes navegación:
se define tangente a la superficie de la tierra en un
punto de referencia. El eje apunta hacia el centro de la Tierra y el hacia el norte
Sistema ejes cuerpo
origen en el centro de masas de la aeronave. Las
direcciones
son, según cierta referencia, hacia delante, hacia la derecha y
hacia abajo respectivamente. Dos casos particulares son:
Pág. 33
Modelado, Control y Percepción en Sistemas Aéreos Autónomos
-
Sistema Ejes estabilidad
: El eje coincide con la posición de equilibrio y el
eje es perpendicular al plano de simetría (de haberlo)
Sistema Ejes viento
: El eje
está alineado con la corriente aguas arriba.
Todos estos sistemas pueden apreciarse en la Figura 1.
Fig. 3-1. Sistemas de referencia empleados
3.3 Modelado mecánico
Aunque en la realidad una aeronave se comporta como un sólido deformable, con apreciables
deflexiones, como en el caso de la flexión alar, los efectos aeroelásticos son poco significativos
excepto en casos muy concretos, como el flutter o la divergencia. Así pues puede emplearse en
un amplio régimen de funcionamiento que el modelo como sólido rígido es suficientemente
preciso para analizar la dinámica.
Las ecuaciones que rigen este tipo de cuerpo son las ecuaciones de Euler (Pamadi 2004):
( ̇
)
( ̇
)
( ̇
)
̇
(
̇
(
̇
)
̇
̇
(
(
̇
̇
̇
)
̇
( )
̇
( )
( )
)
( )
( )
Pág. 34
)
̇
( )
( )
Capítulo 3. Modelado de aeronaves
A partir de las cuáles se obtiene el movimiento conocidas las fuerzas, que en el caso de aviones
son:
Donde
-
u, v, w son las proyecciones sobre cada eje de la velocidad lineal
, , y , ,
son las componentes de los vectores de fuerzas y momentos
torales y
p, q, r son las componentes del vector velocidad angular
, , son los ángulos de Euler y ̇ ̇ ̇ sus respectivas derivadas
3.4 Modelado de fuerzas
3.4.1 Fuerzas másicas
Son las debidas a la fuerza gravitatoria. Puesto que las ecuaciones se plantean en ejes cuerpo,
la proyección del vector de la gravedad es:
( )
( ))
( )
( )
( )
(
3.4.2 Fuerzas aerodinámicas
El cálculo de fuerzas aerodinámicas se realiza habitualmente en ejes viento por ser el
planteamiento natural del problema. Las fuerzas en la dirección de los ejes viento se
denominan resistencia, fuerza lateral y sustentación. La transformación de un sistema a otro es
(
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( ))
( )
Asimismo es común sustituir las velocidades (
) por los valores (
( )
), siendo
( )
Por último, para reducir el número de variables independientes, se definen unos coeficientes
adimensionales obtenidos del análisis dimensional de las ecuaciones de Euler:
Pág. 35
Modelado, Control y Percepción en Sistemas Aéreos Autónomos
El cálculo de las fuerzas aerodinámicas se reduce a calcular estos coeficientes para condición
de vuelo.
Como la resolución del problema aerodinámico es en sí mismo es muy complejo, es común en
la literatura se emplea la aproximación de Byron que establece una dependencia lineal de cada
fuerza y momento con cada variable. A las pendientes de estas rectas se les denomina
derivadas de estabilidad (Nelson 1998).
Un elemento importante a tener en cuenta con la definición de derivadas de estabilidad es que
si se definen como la derivada respecto un valor adimensional respecto a cada variable, será
un valor dimensional. Para solucionarlo se emplean las derivadas adimensionalizadas que son
de la forma:
Donde si
{
{
{ }
}
}
{
}
El cálculo de las derivadas de estabilidad puede realizarse por cuatro medios:
-
Modelos analíticos simplificados
Ensayos experimentales
Relaciones semiempíricas
Cálculo numérico
Este último caso es el más empleado por proporcionar una buena aproximación a la realidad
sin necesidad de llevar a cabo costosos ensayos.
Pág. 36
Capítulo 3. Modelado de aeronaves
3.4.3 Cálculo de derivadas de estabilidad
El problema aerodinámico se reduce al cálculo de los coeficientes anteriores. Tal y como se
indicó anteriormente se opta por el cálculo numérico.
Existen diferentes algoritmos capaces de resolver el flujo en torno a un avión. De entre ellos
uno de los más eficientes en complejidad frente a precisión es el Vortex Lattice Method o
Método de la malla de torbellinos (Mason 1998).
En él, se suplen las superficies sustentadores por una serie de singularidades de tipo torbellino
y se calculan el campo de velocidades y, a partir de él, el de presiones. Es importante destacar
que el VLM es un método potencial y, por tanto, es incapaz de retener efectos viscosos.
Este algoritmo se encuentra implementado en diferentes software, varios de ellos de carácter
libre. Uno de los más habituales es AVL (Drela, AVL User guide 2006) (Athena Vortex Lattice) o
Tornado (Ltd. 2008).
El funcionamiento básico de estos programas consiste en definir la geometría y las condiciones
de contorno e iniciales mediante una API a modo de preprocesador. Posteriormente se ejecuta
el algoritmo y a continuación se puede acceder a los resultados, entre los cuales, se hallan las
derivadas de estabilidad.
3.4.4 Fuerzas propulsivas
El sistema propulsor es la fuente de la energía de la aeronave y, por tanto, responsable último
del movimiento.
Si el motor está alineado con la línea de referencia del avión, las acciones que éste produce
sobre el mismo son, en ejes cuerpo:
( )
(
)
En el caso de aviones de hélice consta de dos elementos claramente diferenciados: el motor y
la hélice. La relación entre ambos es, evidentemente, que la velocidad de giro común a ambos
viene dada por los momentos que cada uno induce en el eje. Matemáticamente:
̇
Así son necesarios los modelos de los momentos producidos.
Una vez determinada la velocidad de giro, el estudio de la hélice proporciona el empuje
obtenido.
3.4.4.1 Motor eléctrico
Existen formas de relacionar la potencia de entrada frente al par producido en un motor
eléctrico. Habitualmente las fuentes de alimentación son de tensión y la variable de control es
un potenciómetro que regula la tensión de entrada, siendo ésta la variable manipulable.
Pág. 37
Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Un modelo de motor brushless es (Drela, First order DC electric model 2007):
((
)
)
3.4.4.2 Hélice
Determinar las características de la hélice equivale a calcular los valores del empuje, el
momento resistivo y la potencia necesaria para condición de vuelo. Habitualmente éstas tres
magnitudes se representan de forma adimensional de forma que el número de variables
independientes se minimiza. Así se definen los coeficientes adimensionales de empuje, par y
potencia como2:
Se puede demostrar que los tres coeficientes dependen de una sola variable denominada radio
de avance J, que se define como:
Existen, al igual que en el caso de las derivadas de estabilidad, códigos CFD que proporcionan
los valores ( ), ( ) y ( ).
3.5 Trimado
A priori la condición inicial de cada uno de los estados no es conocida, sino que sólo se
conocen la altura y la velocidad. Para relacionar ambos se impone la condición de equilibrio (se
supone que en el instante inicial el avión está trimado) y se determinan los valores de los
estados y los actuadores asociados. Para ello se realiza una aproximación analítica que
desprecian términos de orden superior (tales como el incremento de resistencia producida por
la deflexión de los alerones frente a la resistencia total del aparato).
El procedimiento se realiza partiendo de una altura de operación y una velocidad de vuelo, a
partir de ellos:
1. Se supone que el avión es simétrico, de forma que si la posición de equilibrio es de
vuelo simétrico, no aparecen fuerzas lateral-direccionales.
2. Se calcula analíticamente el trimado longitudinal suponiendo posición estacionaria.
2
Existen diferentes definiciones de estos coeficientes. Cuál se emplee es independiente
siempre y cuando se sea coherente en el método de cálculo.
Pág. 38
Capítulo 3. Modelado de aeronaves
3. Se calcula numéricamente el punto de funcionamiento del motor
4. Se calcula las acciones de los alerones necesarias para compensar el momento de la
hélice.
Evidentemente este proceso es sólo una aproximación, pero proporciona resultados
satisfactorios.
Una vez determinado el trimado se puede simular para velocidad y altura el vuelo de la
aeronave.
3.6 Programación
La forma de resolverlo es mediante los comandos ode de Matlab. Existen diferentes solvers
que implementan distintos algoritmos. Para decantarse por uno u otro existen dos aspectos a
tener en cuenta: implementación implícita frente a explícita y rigidez del sistema.
Para más información consultar la ayuda de Matlab (Mathworks 2009).
3.7 Linealización
Las técnicas habituales de control se basan en sistemas lineales (transformada de Laplace,
descripción en variables de estado), de modo que, a priori, el sistema descrito no es útil para el
diseño de un controlador.
Para superar esta limitación es habitual recurrir a una linealización del sistema en el punto de
equilibrio (Slotine 1991) de forma que las técnicas de control lineal sean aplicables.
̇
(
)
̇
Linealización
Donde
( )
( )
Esta linealización puede llevarse a cabo de forma analítica o numérica. Al relizarla según el
primer procedimiento, puede demostrarse que el problema se reduce a dos movimientos
desacoplados: uno longitudinal y otro lateral direccional. De esta forma se reduce las
dimensiones del sistema.
Esta separación presenta la ventaja de permitir analizar y controlar el movimiento de la
aeronave más fácilmente, fundamentalmente mediante la compensación de modos como el
Phogoide, el Short Period, el Dutch Roll y el espiral (Etkin 1959).
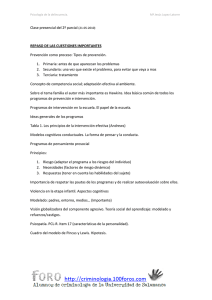
3.8 Aplicación
Lo expuesto en los apartados anteriores se ha aplicado al caso del Viewer, un UAV de
pequeñas dimensiones (3,2 m de envergadura, 8 kg de MTOW). La Fig. 3-2 muestra un modelo
Pág. 39
Modelado, Control y Percepción en Sistemas Aéreos Autónomos
realizado mediante Diseño asistido por ordenador (CAD, Computer Assisted Design) que
reproduce fielmente la fisionomía del Viewer. Hay que tener en cuenta que este tipo de
representaciones, si bien es cierto que son muy útiles para ciertos aspectos como la creación
de planos o la ubicación de sistemas, es innecesariamente detallado para otros como puede
ser ciertos cálculos aerodinámicos. En efecto, a efectos de sustentación la forma específica del
fuselaje no es significativa. Además, el algoritmo CFD empleado se basa en trabajar con
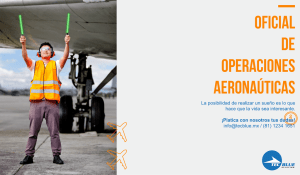
superficies sustentadoras, siendo su aplicación dudosa para cuerpos esbeltos. Por todo ello, a
efectos aerodinámicos se desarrolló el modelo mostrado en la Fig. 3-3, donde se busca
reproducir fielmente las superficies sustentadoras (ala y estabilizadores) en detrimento del
fuselaje.
Fig. 3-2. Modelo CAD del Viewer
Fig. 3-3. Modelo empleado para el cálculoo aerodinámico
Pág. 40
Capítulo 3. Modelado de aeronaves
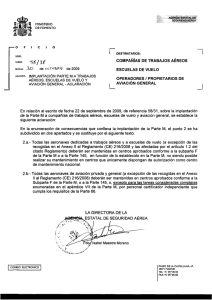
Una vez realizado el cálculo aerodinámicos se puede simular el modelo. Los resultados
obtenidos se muestras en las Fig. 3-4 a Fig. 3-7.
Para mostrar los resultados se ha optado por representar para cada variable de control la
evolución de la variable dominante (por ejemplo, ángulo de alabeo en función de los aleones).
Cada figura contiene dos curvas correspondientes a la simulación del sistema real – no lineal
(en azul) y al sistema linealizado numéricamente (en rojo).
Fig. 3-4. Respuesta ante un escalón en δe
Fig. 3-5. Respuesta ante un escalón en δa
Pág. 41
Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Fig. 3-6. Respuesta ante un escalón en δr
Fig. 3-7. Respuesta ante un escalón en δT
De las gráficas anteriores puede apreciarse que:
Pág. 42
Capítulo 3. Modelado de aeronaves
1- La respuesta del sistema real (no lineal) es físicamente consistente en el sentido que el
modelo hace lo que cabría esperar. Por ejemplo, al aumentar la potencia aumenta la
velocidad de vuelo.
2- El sistema linealizado muestra un comportamiento muy similar al no lineal
3.9 Otros tipos de aeronaves
En este capítulo se ha tratado el modelado de aeronaves de ala fija, sin tratarse, hasta ahora,
aquellas cuya sustentación se basa rotores. Sin embargo puede apreciarse que existen
numerosos robots aéreos basados en este tipo de plataformas. Principalmente en el mundo de
la investigación, el empleo de helicópteros, quadrotors y aparatos similares llega incluso a
superar a la tipología de avión. Por tanto se dedicará una sección para dar unas pinceladas
acerca del modelado de estos aparatos.
3.9.1 Quadrotors
Los quadrotors son un tipo de aeronaves de ala rotatorias muy empleados para el desarrollo
de controladores por su simplicidad y su gran estabilidad.
Un quadrotor consta de una estructura ligera, típicamente cruciforme, que soporta en sus
extremos cuatro rotores. El sentido de giro de dos de ellos es siempre opuesto al de los otros
dos de forma que se obtenga estabilidad de azimuth. El movimiento ascensional se consigue
modificando la potencia de forma uniforme mientras que el giro sobre cualquier eje se
consigue modificando de forma diferencial la potencia de los rotores dos a dos.
Un modelo detallado de la dinámica de un quadrotor puede obtenerse de (Bouabdallah 2005)
Por último comentar que el concepto de quadrotor se ha generalizado y existen aparatos con
diferente número de rotores, denominado como polirrotores y de todas las dimensiones.
Como ejemplo sirva el MD4-1000 de microdrones (diámetro 1,01 m., MTOW 5,550 kg).
3.9.2 Helicópteros
Aunque la dinámica de un helicóptero es significativamente más compleja que la de los
quadrotors, las prestaciones y la flexibilidad de peso que estos proporcionan es muy superior a
los anteriores.
La aerodinámica de un helicóptero es un problema complejo en el que, por la interacción de la
estela de cada pala con la siguiente y el fuerte carácter rotacional no es posible aplicar
algoritmos como el VLM.
Existen aproximaciones sencillas de la aerodinámica, de entre la que cabe destacar la teoría
del elemento de pala (BET, Blade Elementum Theory). Textos como (Bramwell 2001) muestran
cómo aplicar el BET para realizar estimaciones de las derivadas de estabilidad.
Para el caso de helicópteros de pequeño tamaño, donde la relación de masas entre rotor
principal y fuselaje es muy significativa, la velocidad rotacional de las palas es mayor y la
Pág. 43
Modelado, Control y Percepción en Sistemas Aéreos Autónomos
rigidez de la unión pala-cabeza del rotor es más elevada que la de los habituales rotores
flexibles de los helicópteros habituales, es posible emplear modelos mecánicos específicos que
simplifican las ecuaciones (Du 2008).
Pág. 44