Procedimiento de calibración de inclinación, ajuste y orientación
Anuncio

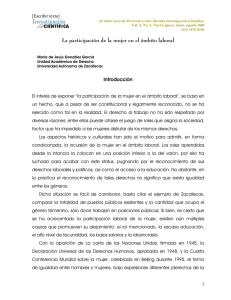
XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 Procedimiento de calibración de inclinación, ajuste y orientación para visión estereoscópica Luis Copertari Unidad Académica de Ciencias de la Computación Universidad Autónoma de Zacatecas Resumen En visión estereoscópica, la distancia para un punto particular entre las imágenes obtenidas de dos cámaras es usada para calcular profundidad. Para ello es necesario que ambas cámaras estén debidamente alineadas, no sólo paralelas una a la otra y a la línea entre ellas sino también coplanares, pero si la calibración no es buena se pierde precisión en la percepción de la profundidad. A continuación se presenta un procedimiento para calibrar, basado en una teoría derivada de una conceptualización y simplificación trigonométrica del problema considerado. El procedimiento es iterativo, dada la falta de precisión debida a las suposiciones simplificadoras hechas. Palabras clave: Estereoscópica, binocular, visión, calibración, procedimiento. Introducción La calibración de la cámara y la estimación de la pose son aspectos fundamentales en visión por computadora, pues están relacionados con visión estereoscópica, estructura para el movimiento, navegación del robot y detección de cambios [15][4][5][9][17][7][13][18][2][10]. La calibración es un procedimiento que relaciona el aparato dado con el modelo ideal de una cámara y luego determina su orientación en un sistema de referencia del mundo real. 1 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 El enfoque más usado es el modelo de cámara de un punto, donde el centro óptico es considerado el centro de la imagen, de forma que todos los puntos en el aparato de imagen son dibujados por luz que pasa del objeto del mundo real, pasa por el punto central, y llega al objetivo en el aparato de imagen. Hay dos tipos de parámetros a considerar: 1) Internos (o intrínsecos): Referentes a características ópticas y geométricas de los lentes y del aparato de imagen. 2) Externos (o extrínsecos): Relacionados con la posición y orientación de la cámara en un sistema de referencia del mundo dado. En este ensayo se trabaja con los parámetros externos, pues se asume que los internos son fijados automáticamente por la cámara, o de forma manual (a conveniencia) por el operador. La calibración es básica en reconstrucción de 3D y en visión estereoscópica, en esta última hay un interés por los sistemas de visión que provean estimados de profundidad precisa, pero para ello se deben contemplar dos cosas: 1) Alta resolución de las imágenes (3072 por 2048 pixeles) para obtener una buena calibración de la cámara. 2) Alta precisión en la calibración de la cámara. Se emplean micrómetros para realizar cambios pequeños (y medibles) en la posición de la cámara. El idea que aquí se plantea es calibrar las cámaras una a una para lograr una alineación paralela, de modo que el eje de rotación sea perpendicular al plano del eje a lo largo del cual la cámara se mueve, y así ambas sean coplanares. Se debe hacer esta alineación de tal forma que el plano de las vías sea perpendicular al eje de rotación de las cámaras, eje que está dado por los ángulos de orientación (α), comparado con el eje horizontal a lo largo de la vía, y por el de ajuste (β), comparado con el eje horizontal a lo ancho de la vía. Ambos ángulos crean un plano, mismo que si es paralelo al plano de la vía, se dice que la cámara está apropiadamente alineada. El eje de rotación es la 2 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 línea perpendicular, el plano creado por los ejes de inclinación y ajuste. Puede haber un ángulo de rotación, que es la inclinación (γ), siempre y cuando ésta sea la misma para ambas cámaras y equivalentes a cero, para que así ellas sean coplanares. Uno de los métodos más conocidos para calibrar la cámara fue propuesto por Tsai [14][15] (también Lenz y Tsai [11]) y está basado en el conocimiento de algunos puntos en el mundo, así como de las correspondientes proyecciones en la imagen. En cambio, otros tipos de calibración no requieren del conocimiento de dichos puntos, es el caso del modelo de Devernay y Faugeras [3], que minimiza la curvatura de segmentos determinados por detección de esquinas de escenas de ambientes estructurados. Problema, algoritmo e hipótesis En visión estereoscópica, dos cámaras toman una imagen cada una. Si las cámaras están bien alineadas, al identificar pares de puntos de cada imagen correspondientes al mismo lugar y al medir la distancia (en pixeles) entre ellos, determina la profundidad aproximada con alta precisión. Un ejemplo es una cámara montada en una vía que puede moverse de un lado a otro. Hay una línea perpendicular a la vía, sin embargo, puede haber un ángulo de inclinación, o una rotación de orientación. El eje de rotación es la línea perpendicular al plano formado por la línea de rotación de orientación y por la línea de rotación de ajuste. La Figura 1 muestra la situación. Está la vía, que forma un plano horizontal, hay dos ejes horizontales: el eje de orientación y el eje de ajuste, mismos que crean planos paralelos al de la vía, siendo el eje de rotación perpendicular al plano de la vía. Hay un ángulo de orientación, α, que indica la rotación del eje de orientación, un ángulo de ajuste, β, que mide la rotación del eje de ajuste, y una rotación de inclinación, γ, que indica la rotación perpendicular al eje de rotación. 3 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 Eje de rotación Vía Eje de inclinación α γ β Eje de ajuste Eje de orientación O Figura 1. Calibrando una cámara. Una cámara bien calibrada tendría α = β = 0, es decir, tendría un eje de rotación perpendicular al plano de la vía. En el caso de dos cámaras, no sólo α y β equivalen a cero, sino también γ. Si γ no es igual a cero, se tendrían las dos cámaras alineadas en paralelo, si γ1=γ2, donde γ1 es el ángulo de inclinación de la primera cámara (izquierda) y γ2 es el ángulo de inclinación de la segunda cámara (derecha), izquierda y derecha desde la perspectiva de atrás de la cámara. Sin embargo, se necesita que ambas cámaras sean coplanares, lo que significa que γ1=γ2=0. Se colocan las cámaras y la vía de tal manera que se logre alta precisión en los cambios de ángulo y posición. Para cada ángulo (α, β y γ) hay un micrómetro para variaciones muy precisas, como las mostradas en la Figura 2, que es para una variación del ángulo de orientación (α). 4 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 Eje de rotación 90 mm Eje de orientación α m Figura 2. Variaciones de ángulo precisas con micrómetros. La longitud de la base que conecta al micrómetro con el eje del aparato es de 90 milímetros. Hay una relación entre α y m; m es la distancia donde el micrómetro se mueve para un cambio de ángulo dado. Tal relación está dada por la ecuación (1); resolviéndola, para m da la ecuación (2). Teniendo un ángulo dado de variación se puede mover el micrómetro para cambios precisos. tan (α ) = m 90 m = 90 tan (α ) (1) (2) No hay necesidad de tener un punto en la pared. Si se emplean dos cámaras, una de ellas (la derecha) toma una imagen de la escena y la otra desde una perspectiva diferente (unos cuantos centímetros al lado izquierdo). Al escanear ambas imágenes se determinan dos pixeles que corresponden al mismo punto en la escena. Después, con la cámara izquierda se hace una pequeña variación en la inclinación, ajuste u orientación y se toma una segunda imagen, que luego es comparada con la primera, capturada por la cámara derecha. Al escanear, es posible determinar cuál punto corresponde con el identificado en la cámara derecha. Asimismo, al comparar los cambios de posición en los mismos puntos de las dos imágenes de la cámara izquierda, se obtienen los datos necesarios para el análisis. 5 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 A B d1 d O f C d2 D p n Figura 3. Razones de razón de longitud foco a punto. En visión por computadora es muy importante el concepto razón de longitud de pixel foco a longitud, o f/p, donde f es la longitud focal y p es la medida de cada pixel. La razón f/p relaciona los parámetros de la imagen formada dentro de los lentes y la imagen del mundo exterior. La Figura 3 muestra los parámetros relevantes y sus relaciones. AB es una línea de referencia en la pared con distancia d1, CD es la proyección de la cámara de la línea AB. CD cuya distancia es d2. La distancia horizontal entre el centro óptico (O) y la pared es d, y la distancia horizontal entre el plano de la imagen y el centro óptimo es f. Puesto 6 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 que hay n pixeles, cada uno de tamaño p, se tiene que n, p y d2 están relacionados, como se indica en la ecuación (4). Sustituyendo d2 de la ecuación (4) en la ecuación (3), da la ecuación (5). Resolviendo para f/p de la ecuación (5), da la ecuación (6). f d = d 2 d1 d2 = np f d = np d 1 f nd = p d1 (3) (4) (5) (6) Las unidades de f/p son [f]/[p] = [n][d]/[d1] = [pixeles][milímetros]/[milímetros] = [pixeles]. La ecuación que permite transformar una medida de pixeles a milímetros o viceversa es la (6). Xp es una medida en pixeles pero se proyecta en la pared en milímetros, donde xm es tal medida. Al sustituir n por xp y d1 por xm en la ecuación (6) se obtiene la ecuación (7), ya que n es la medida en pixeles (xp) y d1 es la medida equivalente en milímetros (xm). f x pd = p xm (7) Resolviendo para xp de la ecuación (7), se obtiene la ecuación (8) y resolviendo para xm de la ecuación (7), da la ecuación (9). Por supuesto que se usa el factor f/p obtenido de la ecuación (6). Las unidades de xp son pixeles y las unidades de xm son milímetros porque las unidades de f/p pixeles (las unidades de p/f son 1/pixeles). ⎛f ⎞x x p = ⎜⎜ ⎟⎟ m (8) ⎝p⎠ d ⎛ ⎞ ⎜ ⎟ 1 ⎛p⎞ x m = ⎜ ⎟x p d = ⎜ ⎟x p d (9) ⎜f ⎟ ⎝f ⎠ ⎜ ⎟ ⎝p⎠ La hipótesis de trabajo consiste en que es posible calibrar una cámara (esto es, encontrar los ángulos correctos para inclinación, ajuste y orientación) haciendo 7 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 una variación en ángulo para inclinación o una traslación a lo largo del eje de la vía, y comparando los nuevos valores obtenidos de las imágenes para longitudes horizontales y verticales. La teoría ha sido construida sobre la base de esta premisa. Teoría Se deben considerar dos tipos de calibración: 1) calibración para alineación paralela, y 2) calibración para convergencia. En la primera, se calcula el ángulo de orientación (a) y el ángulo de ajuste (b), estos movimientos horizontales a lo largo de la vía y del ángulo del eje de rotación (γ) no modifican la posición vertical de un punto de referencia (éstos se mueven a lo largo de la línea de escaneo). En la segunda calibración se espera que ambas cámaras se centren en el mismo punto de referencia al hacer cambios en ajuste e inclinación. Calibración de la orientación para alineación paralela mediante movimientos a lo largo de la vía Es posible calibrar la cámara para alineación de la orientación, es decir, encontrar el valor de α moviendo la cámara a lo largo de la vía. Si la cámara tiene valores negativos de α (si está girada en dirección al reloj), se obtiene la posición de un punto de referencia (x1,y1), se mueve a la derecha y se tiene otra posición (x2,y2). La posición horizontal reduce (x2<x1) y la posición vertical también va a ser menor (y2<y1). La Figura 4 muestra la situación. La parte superior de la Figura 4 muestra dos ejes: de rotación y de ajuste (α), éste último crea un nuevo sistema coordinado de la cámara. Las distancias horizontales y verticales son mostradas (x1, y1). Hay un movimiento a la derecha a lo largo de la vía, luego, una nueva medida de posición es tomada (x2, y2). La misma situación es mostrada en la parte inferior de la Figura 4, excepto que en ese caso aparece la primera posición del punto de referencia en algún lugar de 8 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 las imágenes en las coordenadas (x1,y1), y abajo las coordenadas para la nueva posición (x2,y2). Puesto que x2<x1 y y2<y1, la segunda posición del punto de referencia será por debajo y a la izquierda de la primera. Hay una distancia vertical entre y1 y y2 (y2-y1), y una distancia horizontal entre x1 y x2 (x2-x1). También hay un ángulo de orientación, α, para tal triángulo. La distancia vertical y horizontal, así como el ángulo de orientación están relacionados de acuerdo con la ecuación (10). Resolviendo para α de la ecuación (10) da la ecuación (11). tan (α ) = y 2 − y1 x 2 − x1 ⎛ y − y1 ⎞ ⎟⎟ α = tan −1 ⎜⎜ 2 x x − 1 ⎠ ⎝ 2 (10) (11) 9 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 Eje de rotación x1 x2 y2 α O A y1 α Eje de ajuste (x1, y1) (x2, y2) α Figura 4. Calibración de la orientación para alineación paralela mediante movimiento a lo largo de la vía. Si la orientación fuera en sentido contrario a las manecillas del reloj (α positive), la pendiente sería negativa, de forma que la ecuación (10) permanece. El ángulo de corrección de la orientación, ρα, es el negativo de a, como se muestra en la ecuación (12). ρα = -α (12) 10 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 También nótese que si el movimiento es a la izquierda, en vez de a la derecha, los signos deben ser revertidos. γ O' a A' xm B' C D xp γ a O γ A xm B Figura 5. Calibración de inclinación y ajuste para alineación paralela mediante proyección de imagen. Es posible calibrar la cámara de forma que su línea sea perpendicular a la que hay entre los dos puntos de referencia en la pared; aquella línea es la que hay entre el centro óptico de la cámara y el centro del plano de la imagen. La Figura 5 muestra la situación una vez que se ha alineado la cámara enfocada a uno de los puntos de referencia en la pared. Si los puntos de referencia son verticales entonces se hace una alineación de ajuste; si son horizontales se tiene una de inclinación. O' es el punto de referencia al que la cámara apunta. Hay un segundo punto de referencia a A'. El ángulo de inclinación γ es el ángulo de los triángulos 11 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 OAB y O'A'B'. La distancia entre los puntos C y D es la que hay en la imagen entre el centro de la pantalla (C) y la proyección del punto A' en el plano de la imagen (D); tal distancia (CD) es xp, la cual está medida en pixeles. Se puede proyectar xp en la pared y obtener la medida equivalente, xm (en milímetros) usando la ecuación (9). La distancia xm mide la línea OB y la línea O'B'. La distancia entre los dos puntos de referencia dados por la línea O'A' es a, la que está en milímetros. Del triángulo OAB se obtiene la relación entre γ, a y xm, que es dada en la ecuación (13). Resolviendo para γ de la ecuación (13) se obtiene la ecuación (14). El signo negativo ocurre porque γ mide una rotación en dirección contraria a las manecillas del reloj. El ángulo de corrección, dado por ργ, es el signo opuesto de γ, como se muestra en la ecuación (15). xm a ⎛x ⎞ γ = − cos −1 ⎜ m ⎟ ⎝ a ⎠ ργ = -γ cos(γ ) = (13) (14) (15) Nótese que en este caso xp es positive porque el segundo punto de referencia está a la derecha del punto central, de forma tal que xm es también positiva y el ángulo γ debe ser revertido por el cambio de signo en la expresión. Análisis, algoritmo y prueba El propósito de la prueba experimental es ver si las ecuaciones trabajan en el mundo real y si es posible usar algún procedimiento (quizá iterativo) para encontrar la solución. Así pues, se da comienzo con las suposiciones. El error, δ, entre dos medidas, m1 y m2, donde m1 es la primera medida y m2 es la segunda medida, está dada de acuerdo a la ecuación (16). Tal error es una medida relativa expresada en porcentaje. δ= m 2 − m1 100% m1 (16) 12 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 Resultados Para llevar a cabo los experimentos se dibujó una hoja de calibración. La hoja era un arreglo de 8 cuadros alineados de manera horizontal y 5 de manera vertical, cada uno de 50 por 50 milímetros, y la longitud total era de 400 por 250 milímetros. Para una mejor referencia, los recuadros se etiquetaron según su posición pegándose en la pared hacia el centro de la vía (horizontalmente) y arriba de la vía (verticalmente). Experimento 1 El propósito del primer experimento fue medir la razón f sobre p, tanto horizontal como verticalmente. Con la cámara izquierda se mide la distancia al arreglo de referencia, d=2355 mm, y se toma una foto. De la foto, se miden los lados izquierdo (x1), derecho (x2), el de arriba (y1) y abajo (y2) del arreglo de referencia. Resultando que x1=811 y x2=2021, de modo que nx=2021-811=1210. La distancia horizontal al arreglo de referencia es d1=400 mm. De la ecuación (6), fx/px=nd/d1=1210x2355/400=7123.75. También, y1=229 y y2=988, lo que significa que ny=988-229=759 y d1=250 mm, y fy/py=759x2355/250=7149.78. Al parecer, las razones f sobre p horizontales y verticales son iguales, o al menos muy similares. Pero al moverse la vía cerca del arreglo de referencia (d=1575 mm), se obtuvieron diferentes valores para la razón f sobre p. Se encontró que fx/px es igual a 7115.06 y fy/py=7112.7. El error entre estos datos y los de arriba es de aproximadamente el 0.5%. Las variaciones tal vez se deban a distorsiones en las imágenes tomadas con la cámara, por lo que se creó un arreglo tan largo como la vista de la cámara. Se toma una fotografía de tal arreglo, se elige una serie de líneas horizontales a lo largo de posiciones verticales de la cámara, y por último se mide su longitud. Las primeras líneas horizontales son a lo largo de la imagen, pero los conjuntos subsecuentes son horizontales hacia adentro. La Figura 6 ilustra las medidas tomadas. 13 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 Para la línea de arriba, que es la línea 4, se toma una serie de puntos. El primer conjunto está en los bordes izquierdo y derecho (columnas 4 y 21). La distancia entre estas, n4-21, es medida. La medición es de 0 mm porque hay 0 mm desde el borde exterior. La segunda medida, n6-19, fue para las columnas 6 y 19, los cuales eran 100 milímetros hacia adentro (Recuérdese que cada recuadro es de 50 milímetros de largo, y la columna 6 es 2 recuadros a la derecha de la columna 4, tal como la columna 19 es dos cuadros a la derecha de la columna 21). También se midió las distancias entre las columnas 8 y 17 y las columnas 10 y 15, las cuales son n8-17 y n10-15, respectivamente. Linea 4 n4-21 n6-19 n8-17 n10-15 Linea 6 n4-21 n6-19 n8-17 n10-15 Linea 14 n4-21 n6-19 n8-17 n10-15 Figura 6. Midiendo la distorsión horizontal de la cámara Lo mismo se hizo para las líneas 6, 8, 10, 12 y 14. Luego se calcula la distancia entre n4-21 en la línea 4 y n4-21 en la línea 6, llamada d4-6 en 0 mm. También hay d4-6 en 100, 200 y 300 mm y los resultados se grafican en la Figura 7. Pero a medida que se aleja de los dos pares de líneas superiores (d4–6) hacia el par de líneas inferiores (d12–14), la disparidad entre las líneas crece. Por otra parte, la disparidad decrece a medida que la distancia del borde se incrementa. En la Figura 7, la diferencia del borde de la disparidad entre las líneas (0 mm) es la más larga y tiende a reducirse a medida que la distancia al 14 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 borde se incrementa, primero en 100 mm, luego en 200 mm y por último en 300 mm. Esto significa que lo que debería ser visto como un recuadro al fondo de la imagen es visto al fondo de una botella de vidrio por la considerable distorsión al fondo de las imágenes. 6 5 4 0 mm 3 100 mm 2 200 mm 1 300 mm 0 -1 d4-6 d6-8 d8-10 d10-12 d12-14 -2 Figura 7. Distorsión horizontal de la cámara También se consideró la distorsión vertical y se siguió un procedimiento similar para medirla, ilustrado en la Figura 8. Se toman pares de puntos a lo largo de las líneas verticales en las columnas 4, 6, 8, 10, 12, 14, 16, 18 y 20. El primer par de puntos es n4-15 para los renglones 4 y 15 y se le llama 0 mm. Se tienen 100 mm (renglones 6 y 13) y 200 mm (renglones 8 y 11). La diferencia entre las columnas 4 y 6 es d4–6, así como las diferencias subsecuentes: d6–8, d8–10, d10–12, d12–14, d14–16, d16–18 y d18–20, cada una de 0 mm, 100 mm y 200 mm. Los resultados de las diferencias se grafican en la Figura 9. 15 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 Line 4 Line 20 n4-15 Figura 8. n6-13 n8-11 n4-15 n6-13 n8-11 Midiendo la distorsión vertical de la cámara. 7 6 5 4 0 mm 3 100 mm 200 mm 2 1 0 -1 d4-6 d6-8 d8-10 d10-12 d12-14 d14-16 d16-18 d18-20 -2 Figura 9. Distorsión vertical de la cámara Experimento 2 Para el ejercicio de corrección de orientación, medidos en puntos de referencia arriba, al medio y abajo, a lo largo de la línea del eje vertical del arreglo de 16 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 referencia, se fija el micrómetro del ángulo de orientación a cero, luego se mueve lo más posible a la izquierda de forma que la línea de referencia aún esté al lado derecho de la pintura. Después se toma una imagen y se hacen las primeras medidas de las posiciones de un punto de referencia, (x1,y1), son dadas como sigue: (1468,463), medio, (355,991) y abajo (363,1322). Por medio de la ecuación (10) se calcula el ángulo de orientación α. Se usa el punto del medio para que la distorsión de la imagen se mantenga a un mínimo, en este caso, α=tan-1((991-961)/(355-1479))=-0.026684056 radianes= 1.5º. El ángulo de corrección, ργ, igual a -a, se indica en la ecuación (12). Empleando la ecuación (2) se obtiene la distancia a la que el micrómetro se debe mover, m=90 tan(0.026684056)=2.40 milímetros. Ahora se verifica si el ángulo de orientación ha sido corregido y se mueve la cámara a la izquierda tanto como sea posible, dado el punto de referencia y la distancia finita de la vía. Luego se toma una imagen. Las posiciones de los puntos de referencia (x1,y1) son dadas como sigue: arriba - (1491,968), medio (1490,967) y abajo (1489,1299). Después se mueven las cámaras a la derecha tanto como sea posible, dada las limitaciones de la imagen y las mediciones de la vía. La segunda medida del punto de referencia (x2,y2) son: arriba - (227,468), medio - (227,967) y abajo (227,1297). Nótese que el primer conjunto de medidas es siempre 227, dada la diferente distorsión de la imagen, y las diferentes posiciones en su arreglo. También nótese que la diferencia vertical entre la primer y segunda medida de abajo es de 2 pixeles (1299 comparado con 1297) debido a la distorsión de la imagen. Discusión Las figuras presentan distorsión del lado izquierdo de la imagen. Combinando los resultados de la Figura 7 y de la Figura 9, la conclusión es que hay distorsión al fondo y a la izquierda de la imagen, distorsiones que se ven como las mostradas 17 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 en la Figura 10 si hubiera un rectángulo perfectamente dibujado en la pared, pero ésta ha sido exagerada, pues no es mayor a 5 ó 6 pixeles. Figura 10. Distorsión de la cámara. Conclusión La recomendación al lector es tratar de usar imágenes cerca del centro de la pantalla y así evitar confiar en datos tomados de la parte inferior izquierda de la imagen, en especial en el caso de calibración de la orientación. Por medio del enfoque planteado es posible calibrar en alineación coplanar un par de cámaras a la vía. Aunque también está la cuestión de la suposición, comprobar si el centro óptico coincide con el eje de rotación. Sin embargo, se encontró un error porque la distancia a la pared (2000 mm) es muy grande comparada con la distancia entre el centro óptimo y el eje de rotación (50 mm). También hay un error de medida, puesto que es difícil localizar con suficiente precisión dónde está un punto de referencia en la pared; por lo general, dichos puntos ocupan 2 ó 3 pixeles. El lector debe ser consistente con la manera en que hace las mediciones; un error de la suposición hecha comúnmente conduce a errores menores o equivalentes a un pixel, así que en la práctica pueden ignorarse. 18 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 Bibliografía [1] BOBROW, Jerry, Cliffs Quick Review Algebra I, Wiley Publishing Inc., New York (2001). [2] DEBEVEC, P., "Reconstructing and Augmenting Architecture with Image–Based Modelling", en Proceedings of the International Symposium on Virtual Architecture (VAA), Dublin, Ireland, (2001) pp. 1–10. [3] DEVERNAY, F., and O Faugeras, "Automatic Calibration and Removal of Distortion from Scenes of Structured Environments", en Proceedings of the Society of Photo–Optical Instrumentation Engineers (SPIE) (1995). [4] FAUGERAS, O., Three–Dimensional Computer Vision, MIT Press (1993). [5] FITZGIBBON, A.W., and A. Zisserman, "Automatic 3D Model Acquisition and Generation of New Images from Video Sequences" en Proceedings of European Signal Processing Conference (EUSIPCO), Rhodes, Greece, (1998) pp. 1261– 1269. [6] GAUCH Jr., Hugh G., Scientific Method in Practice, Cambridge University Press, United Kingdom (2003). [7] HEIKKILA, J., and O. Silven, "A Four–Step Camera Calibration Procedure with Implicit Image Correction" en Proceedings of IEEE Computer Vision and Pattern Recognition (1997), pp. 1106–1112. [8] KAY, David A., Cliffs Quick Review Trigonometry, Wiley Publishing, New Yok (2001). [9] KUMAR, R., and A. Hanson, "Robust Methods for Estimating Pose and a Sensitivity Analysis", en GVGIP–Image Understanding, Vol. 60, No. 3 (1994), pp. 313–342. [10] KURAZUME, R., K. Nishino, Z. Zhang, and K. Ikeuchi, "Simultaneous 2D images and 3D geometric model registration for texture mapping utilizing reflectance attribute", en Proceedings of Fifth Asian Conference on Computer Vision (ACCV), Vol. I (2002), pp. 99–106. 19 XII JORNADAS DE INVESTIGACIÓN, Revista Investigación Científica, Vol. 4, No. 2, Nueva época, mayo–agosto 2008 ISSN 1870–8196 [11] LENZ, R., and R. Tsai, "Techniques for Calibration of the Scale Factor and Image Center for High Accuracy 3–D Machine Vision Metrology", en IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 10, No. 5 (1988). [12] MAYER, Robert E., and Frank Ayres, Jr., Schaum's Outlines of Theory and Problems of Trigonometry, McGraw Hill, New York (1999). [13] POLLEFEYS, M., "3D Modelling from Images" en Tutorial Notes, in conjunction with ECCV 2000, Dublin, Ireland (2000). [14] TSAI, R., "An Efficient and Accurate Camera Calibration Technique for 3D Machine Vision", en Proceedings of the IEEE Conference on Computer Vision and Patten Recognition (CVPR) (1986). [15] TSAI, R.Y., "A versatile camera calibration technique for high–accuracy 3D machine vision metrology using off–the–shelf TV cameras and lenses", en IEEE Journal of Robotics and Automation, Vol. 3 (1987), pp. 323–344. [16] WILSON, Edgar Bright, An Introduction to Scientific Research, Dover Publications, New York (1990). [17] WILSON, Reg G., Modeling and Calibration of Automated Zoom Lenses, Ph.D. Thesis, Department of Electrical and Computer Engineering, Carnegie Mellon University (1994). [18] ZHANG, Z., "A flexible new technique for camera calibration" en IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 22, No. 11 (2000), pp. 1330–1334. 20




![Prueba Segundos2[1]](http://s2.studylib.es/store/data/003397536_1-3ac4e8618b6474fb10e9bb3037bc9dd2-300x300.png)