MAQUINAS SIMPLES Y POLEAS - Universidad Santiago de Cali
Anuncio

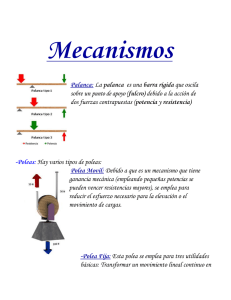
GUIAS ÚNICAS DE LABORATORIO DE FÍSICA I DINÁMICA MAQUINAS SIMPLES Y POLEAS SANTIAGO DE CALI UNIVERSIDAD SANTIAGO DE CALI DEPARTAMENTO DE LABORATORIOS DDEEPPAARRTTAAM MEENNTTOO DDEE LLAABBOORRAATTOORRIIOOSS GGUUIIAASS DDEE FFIISSIICCAA II MÁQUINAS SIMPLES - POLEAS 1. INTRODUCCIÓN. Una máquina simple es un dispositivo diseñado para simplificar la realización de trabajo o la transferencia de energía. Ejemplos de máquinas simples son la polea, la palanca, el tornillo, el plano inclinado, etc. En esta práctica se estudiarán diferentes combinaciones de poleas y se caracterizará la ventaja que puede representar su uso. Para ello usted determinará la ventaja mecánica y la eficiencia de diferentes combinaciones de poleas. La polea fija es aquella que no cambia de sitio, solamente gira alrededor de su propio eje. Se usa, por ejemplo, para subir objetos a los edificios o sacar agua de los pozos. En cambio, la móvil, además de que gira alrededor de su eje, también se desplaza. Las poleas móviles pueden presentar movimientos de traslación y rotación. El funcionamiento de cualquier máquina simple es esencialmente el mismo: una fuerza F realiza un trabajo sobre una máquina. Como consecuencia, la máquina ejerce una fuerza T (generalmente mayor que F) sobre su entorno. En cuanto a la energía, la máquina recibe una cantidad de trabajo WF (el trabajo realizado por F) y entrega un trabajo WT (el trabajo realizado por T). Si la máquina fuese ideal, es decir, si no disipara la energía que recibe, el Principio de Conservación de la Energía obligaría a que lo dos trabajos fueran iguales: W T = WF (1) Además, como generalmente F y T no son iguales, la razón T/F define una característica de la máquina llamada VENTAJA MECANICA TEORICA (VMT), que es el factor por el que la máquina amplifica la fuerza que se le aplica: DDEEPPAARRTTAAM MEENNTTOO DDEE LLAABBOORRAATTOORRIIOOSS GGUUIIAASS DDEE FFIISSIICCAA II VMT = (T/F) (2) DEMUESTRE que para un sistema de poleas ideal, es decir, poleas con masa despreciable y sin rozamiento en sus ejes; que eleva una masa m (Figura 1) con cuerdas también ideales, la ventaja mecánica teórica puede escribirse como: VMT = (XF/ XT) (3) (AYUDA: En poleas móviles la relación de fuerzas sobre ellas es la inversa de la relación de aceleraciones de los objetos que ellas conectan). En (3) XF es la distancia recorrida por el punto de aplicación de la fuerza F y XT la distancia recorrida por el punto de aplicación de T. En la realidad resulta imposible construir una máquina ideal, pues alguna fracción del trabajo entregado a la máquina se disipa por acción de las fuerzas de rozamiento. Así, las máquinas reales desperdician una parte de la energía que se les suministra. Por tanto, el trabajo entregado por la máquina siempre es menor al que recibe. Si se llama FR a la fuerza que actúa sobre la máquina real y WR a su trabajo, lo anterior quiere decir que: W T < WR (4) MÁQUINA (SISTEMA DE POLEAS) T XF m XT F Figura 1 Para evaluar que tan cerca está una máquina real de ser ideal, se define la eficiencia de la máquina como la razón entre el trabajo que entrega y el trabajo que recibe, esto es: DDEEPPAARRTTAAM MEENNTTOO DDEE LLAABBOORRAATTOORRIIOOSS GGUUIIAASS DDEE FFIISSIICCAA II e = (WT / WR) (5) De otro lado, como la fuerza necesaria para accionar una máquina real (FR) es distinta de la fuerza F que se necesitaría sí la máquina fuese ideal, se define la ventaja mecánica de una máquina real, VMR (VENTAJA MECÁNICA REAL), como: VMR = (T/FR) (6) De las definiciones anteriores PRUEBE que la eficiencia también puede expresarse como: e = (VMR) / (VMT) (7) En esta practica se medirá la eficiencia de los tres conjuntos de poleas mostrados en la Figura 2. Haciendo análisis de fuerzas sobre cada uno de los sistemas de la Figura 2 y aplicando las Leyes de Newton puede calcularse la ventaja mecánica teórica (T/F) de cada sistema de poleas. Suponga que la fricción es nula, que las poleas y las cuerdas carecen de masa y que el sistema está en equilibrio o se mueve a velocidad constante. Tenga listos sus cálculos para comparar más abajo con los de la tabla correspondiente a cada figura. 2. PROCEDIMIENTO. Se medirán experimentalmente los valores de VMT, VMR y e montando cada uno de los sistemas de poleas de la Figura 2. Puesto que los valores de las distancias XF y XT no dependen de si la máquina es real o ideal, VMT puede calcularse usando la ecuación (3). Para esto es necesario medir XF y XT sobre el sistema real de poleas. Del mismo modo, la definición (6) permite obtener VMR midiendo T y FR. Para ello se cuelgan masas de peso conocido a cada lado del sistema de poleas. Los pesos de estas masas serán los valores de FR y T respectivamente. (Si desea, lea directamente estos pesos en gramos - fuerza para simplificar los cálculos). DDEEPPAARRTTAAM MEENNTTOO DDEE LLAABBOORRAATTOORRIIOOSS GGUUIIAASS DDEE FFIISSIICCAA II DISPOSITIVOS DE POLEAS. T F m F F m T m (a) T (c) (b) Figura 2 Monte cada uno de los sistemas mostrados en la Figura 2 y para cada uno realice el siguiente procedimiento: 2.1 Cuelgue la masa m como se muestra en la figura respectiva. Colgando pesos del otro extremo determine el MAXIMO VALOR FR que el sistema puede soportar sin que llegue a ponerse en movimiento (este será también el mínimo valor de FR necesario para elevar la masa m). Esto garantiza que a = 0 y que Peso = Tensión. Anote en la tabla los valores de FR y T. 2.2 Ahora desplace el punto de aplicación de FR una distancia XF y mida la distancia XT que se desplaza T. Anote en la tabla los valores de XF y XT para este sistema. 2.3 Repita 2.1 y 2.2 para otros valores diferentes de m y anote sus resultados en las tablas de abajo. 2.4 Con los valores obtenidos en el procedimiento calcule VMR, VMT y e para cada uno de los ensayos realizados con cada dispositivo y determine la eficiencia promedio de cada dispositivo. 2.5 Compare la relación teórica (T/F) que obtuvo en su análisis teórico dinámico de cada sistema, con los valores experimentales de VMT y VMR que acaba de medir. 3. PREPARACIÓN. Para esta practica repase los conceptos relacionados con las Leyes de Newton, diagramas de fuerzas, trabajo mecánico, energía y máquinas simples. SUGERENCIA: No sobrepasar de 300 gr en ningún caso. DDEEPPAARRTTAAM MEENNTTOO DDEE LLAABBOORRAATTOORRIIOOSS GGUUIIAASS DDEE FFIISSIICCAA II PROFESOR FECHA Apellidos y Nombres Código INTEGRANTES DEL GRUPO DISPOSITIVO (a): Peso FR XF XT VMR VMT e XF XT VMR VMT e e= DISPOSITIVO (b): Peso FR e= DDEEPPAARRTTAAM MEENNTTOO DDEE LLAABBOORRAATTOORRIIOOSS GGUUIIAASS DDEE FFIISSIICCAA II DISPOSITIVO (c): Peso FR XF XT VMR VMT e e= DDEEPPAARRTTAAM MEENNTTOO DDEE LLAABBOORRAATTOORRIIOOSS GGUUIIAASS DDEE FFIISSIICCAA II