SISTEMAS DIN´AMICOS 2002
Anuncio

SISTEMAS DINÁMICOS 2002 - CAOS
Guillermo Abramson
Centro Atómico Bariloche, Instituto Balseiro y CONICET
2o cuatrimestre 2002
Programa sintético
1. Fenomenologı́a de los sistemas caóticos.
2. Sistemas paradigmáticos:
El mapeo logı́stico.
Las ecuaciones de Lorenz.
3. Caracterización del movimiento caótico:
Sensibilidad a las condiciones iniciales.
Exponente de Lyapunov.
Medida de probabilidad invariante.
Atractores extraños.
4. Rutas al caos:
Cascadas de bifurcaciones.
Intermitencia.
Ruelle-Takens-Newhouse.
1
1.
Fenomenologı́a de los sistemas caóticos
Hoy en dı́a todos estamos familiarizados en mayor o en menor medida con la teorı́a del caos,
que ha encontrado un lugar inclusive en la cultura popular. Caos, fractales, complejidad, son
conceptos que encontramos en argumentos de pelı́culas, en tapas de discos, hasta en decoración
de camisetas. Vale la pena tratar de imaginarse el estado de las cosas anterior a este fenómeno,
cuando el caos “no existı́a.” En el siglo XVIII, el filósofo y matemático francés Pierre Simon de
Laplace, uno de los más notables representantes del racionalismo iluminista, conjeturó que, dada
la posición y la velocidad de cada partı́cula del Universo, se podrı́a predecir el futuro con toda
exactitud. Este concepto ejerció una enorme influencia, incluso teológica y psicológica, durante
todo el siglo XIX en el mundo occidental. El primer desafı́o a esta visión provino de la mecánica
cuántica, y en particular del principio de indeterminación, que impide el conocimiento cabal de
las condiciones iniciales. De todos modos, Laplace podrı́a haber argumentado que, en fin, no se
podrı́a predecir el futuro exactamente, pero se lo podrı́a predecir en principio. Es decir, se podrı́a
esperar que los errores de la predicción, fruto de los errores de la condición inicial, se mantuvieran
acotados, o crecieran de una manera controlable. El caos determinista y su sensibilidad a las
condiciones iniciales, en cambio, obligan a que los errores crezcan incontrolablemente.
Se podrı́a suponer, de manera ingenua, que un sistema determinista (por ejemplo uno cuya
dinámica está determinada por ecuaciones diferenciales continuas) da siempre lugar a un tipo
de movimiento regular o “suave,” puesto que los estados sucesivos del sistema evolucionan de
manera continua de estados previos. En la vida cotidiana conocemos muchos ejemplos de sistemas
ası́: uno gira un poco el volante del coche, y la trayectoria del coche cambia ligeramente. Uno
patea una pelota varias veces casi de la misma manera, y la pelota termina casi en el mismo
lugar en el ángulo superior derecho del arco. En la primera parte de este curso hemos visto, de
hecho, dos tipos de comportamiento asintótico para las órbitas de un sistema que no diverge:
puntos fijos y ciclos lı́mite, ambos de carácter “periódico.”
Sin embargo, conocemos también por experiencia cotidiana que existen sistemas que no siguen estas sencillas reglas. Sistemas en los cuales una pequeña variación en las condiciones
iniciales los arroja a trayectorias completamente distintas, de apariencia irregular, no periódicas, impredecibles en buena medida. Tal es el caso de arrojar un globo, en lugar de una pelota,
o lanzar una moneda al aire. Ya Henri Poincaré, a comienzos del siglo pasado, observó que
existen sistemas mecánicos descriptos por las ecuaciones de Hamilton, cuyas órbitas son irregulares y caóticas. Durante mucho tiempo esto se consideró una curiosidad. Finalmente, en 1963,
el meteorólogo Edward Lorenz encontró un sistema sencillo de tres ecuaciones diferenciales de
primer orden, acopladas y no lineales (un modelo de la atmósfera) que daba lugar a trayectorias
completamente caóticas. El trabajo de Lorenz permaneció ignorado durante más de una década,
hasta que se reconoció su importancia durante el “boom” de la nueva ciencia interdisciplinaria
del caos determinista disparada, por supuesto, por las cada vez más rápidas y poderosas computadoras digitales. La importancia de los fractales—el lugar donde “vive” el caos—fue también
intuido por Poincaré a través de la intrincada distribución de puntos estables e inestables en
el espacio de fases de un sistema hamiltoniano. Sin embargo, su estudio debió esperar hasta
ser redescubiertos por Benoit Mandelbrot a mediados de los ‘70. A pesar de la impresionante
intuición de Poincaré algunos problemas debı́an, evidentemente, esperar hasta la invención de
las computadoras para florecer en plenitud.
Durante los años ‘70 y ‘80 se fue consolidando el convencimiento de que el comportamiento
caótico no es una rareza en los sistemas fı́sicos descriptos por ecuaciones no lineales, sino el comportamiento tı́pico. Grandes regiones continuas en el espacio de los parámetros que caracterizan
estos sistemas corresponden a movimientos caótico. Por el contrario, el movimiento periódico
resultó ser un fenómeno relativamente raro y excepcional en medio de un mar de caos.
Desafortunadamente, no existe una receta que permita predecir si un dado sistema dinámico
posee comportamiento caótico. La única solución a este problema parece ser, aún treinta años
después de “boom” del caos, la experimentación o la exploración numérica y la inspección directa
2
Sistema
Cuadro 1: Detección del caos en sistemas sencillos.
Ecuaciones de movimiento
Péndulo
Experimento de Bénard
Reacción de Belousov-Zhabotinsky
Sistema de Hénon-Heiles
θ̈
x
ẋ
ẏ
ż
ẋ
ẏ
ż
−̇
→
x
−
→
x
H
−̇
→
p
+
=
=
=
=
=
=
=
=
=
=
=
γ θ̇ + g sin θ = F cos ωt
θ, y = θ̇, z = ωt
y
−γy − g sin x + F cos z
ω
−σx + σy
rx − y − xz
xy − bz
−
→→
F (−
x , λ)
[c1 , c2 , . . . , cd ]
1 3
1 P2
2
2
2
i=1 (pi + qi ) + q1 q2 − 3 q2
2
−̇
,→
q = − ∂H
− ∂H
−
→
∂→
q
∂−
p
de las trayectorias. Existe sin embargo un resultado general que limita la existencia del caos:
el teorema de Poincaré-Bendixson asegura que en un sistema de tiempo continuo (una sistema
diferencial) de dimensión 2, los únicos posibles atractores son puntos fijos y ciclos lı́mite. Es
decir, cualquier órbita acotada es necesariamente periódica a tiempos largos. De algún modo, el
plano no tiene “lugar” para el caos. Por otro lado, puesto que los sistemas de dimensión 1 sólo
pueden presentar puntos fijos como órbitas acotadas (un resultado trivial), podemos concluir
que se requiere al menos un sistema de dimensión 3 para encontrarnos con trayectorias caóticas.
En sistemas de dimensión alta, el caos es el comportamiento tı́pico. En sistemas de evolución
discreta (mapeos) este requisito dimensional no se aplica, y mapeos de dimensión 1 pueden
comportarse caóticamente.
Es de destacar que tanto en sistemas diferenciales como en mapeos existe un tercer tipo de
movimiento posible, llamado cuasiperiódico. Es tı́pico encontrarlo en la dinámica hamiltoniana,
tal como el movimiento de los planetas, y se caracteriza por consistir de varios movimientos periódicos cuyas frecuencias son mutuamente irracionales (es decir, su cociente es también irracional). En tal caso, las órbitas nunca se cierran, y el movimiento resulta efectivamente aperiódico.
Sin embargo, muchas de las propiedades de tales sistemas resultan más parecidas a las de los
sistemas periódicos que a las de los caóticos.
Antes a avanzar a los temas especı́ficos que estudiaremos, vale la pena una excursión fenomenológica para ganar alguna intuición sobre los sistemas caóticos. La Tabla 1 y la Fig. 1 muestran
cuatro sistemas sencillos y representativos que exhiben caos.
El primer sistema es el sencillı́simo péndulo plano forzado, cuya ecuación de segundo orden
se muestra convertida en un sistema de tres ecuaciones de primer orden, dependiente de los
parámetros γ (fricción), g (aceleración gravitatoria) y ω (frecuencia angular de la fuerza externa).
Se ve en la figura que la trayectoria, obtenida mediante integración numérica, tiene “aspecto
caótico” si la intensidad de la fuerza supera cierto umbral Fc .
Vale la pena reflexionar un poco acerca de este aspecto caótico o aleatorio de las trayectorias. Los sistemas fı́sicos, según entendemos hoy en dı́a, pueden estar sujetos a tres clases de
aleatoriedades bien distintas. En primer lugar, tenemos el caso de los sistemas de muchos grados
de libertad. Una partı́cula Browniana sigue una trayectoria aleatoria, por ejemplo. El origen del
azar está en que la partı́cula, suspendida en un lı́quido, está sujeta al bombardeo de muchı́simas
moléculas que no vemos (o que preferimos no ver), agitadas térmicamente de modo que sus
movimientos están descorrelacionados, cuyo resultado promediado, o macroscópico, es aleatorio.
Esta es la aleatoriedad de los sistemas estadı́sticos, que es la base de la termodinámica desde
la época de Boltzman. No deja de ser un misterio por qué esto es posible, es decir por qué el
mundo está hecho de tal modo que un sistema de mucho grados de libertad permite que casi
3
Figura 1: Detección del caos en los sistemas de la Tabla 1 (de [8]).
todos ellos se promedien y desaparezcan, y los pocos restantes se comporten como aleatorios.
Por otro lado, un segundo tipo de azar es el manifestado por los sistemas cuánticos. El
estado de un sistema cuántico, y sus transiciones entre distintos estados, están determinados
probabilı́sticamente de manera intrı́nseca. Esto es, naturalmente, aún más misterioso que lo
anterior.
Finalmente, tenemos sistemas que no son cuánticos, y que tienen unos pocos grados de
libertad, todos ellos “visibles,” y que también presentan caracterı́siticas “aleatorias” a pesar de
que la dinámica es absolutamente determinista. Este es el caos “determinista,” que nos interesa
en este curso.
Un recurso un poco más cuantitativo que la observación de la trayectoria es el uso de una
transformada de Fourier de x(t), que eventualemnte sirve para distinguir entre trayectorias
periódicas de aspecto complicado y caos:
x(ω) = lı́m
Z T
T →∞ 0
eiωt x(t)dt.
(1)
Si el movimiento es periódico, el espectro de potencia
P (ω) = |x(ω)|2
(2)
tiene solamente las lı́neas o “picos” discretos de las correspondientes frecuencias, mientras que al
movimiento caótico corresponde un espectro ancho en P (ω), generalmente superpuesto a varios
4
picos correspondientes a frecuencias caracterı́sticas del sistema. Esta transición se muestra en el
segundo caso de la Figura 1, el experimento de Bénard. En éste, un lı́quido se calienta por debajo
en un campo gravitatorio. El lı́quido caliente de abajo intenta subir, y el frı́o de arriba intenta
bajar, todo esto en contra de la viscosidad del lı́quido. Para pequeños valores de ∆T , el lı́quido
permanece en reposo y el calor se transfiere por conducción. Este estado se vuelve inestable a
un valor crı́tico del número de Raleigh Ra (proporcional a ∆T ), y se establece un estado de
“rollos” de convección. Más allá de un segundo valor crı́tico Rc se pasa a un régimen caótico.
En la figura se ve esta transición en el espectro de potencia de la velocidad en la dirección x,
medida experimentalmente. Experimentos “cualitativos” pueden hacerse en la cocina, calentando
suavemente aceite en una sartén, o sopa crema.
El sistema del experimento de Bénard constituye un modelo de la atmósfera, y Lorenz derivó para el mismo un sistema de ecuaciones simplificado que es el que es muestra en la figura.
El análisis numérico de este sistema llevó a Lorenz al descubrimiento del caos en sistemas deterministas disipativos.
Cabe señalar que, tanto desde un punto de vista experimental como numérico, la obtención
de un espectro de Fourier libre de artefactos y ruido involucra grandes dificultades. En primer
lugar, obsérvese que la Ec. 1 está definida como un lı́mite para tiempo infinito, de modo tal que,
en la práctica, se requiere un tiempo de observación muy largo, del orden de los perı́odos más
largos de las componentes de Fourier. De lo contrario, estos aparecerı́an incorrectamente como
componentes no periódicas de la órbita. El ruido es aun más peligroso, ya que contribuye con
un fondo continuo en el espectro.
En tercer lugar, vemos en la Tabla y en la Figura el sistema conocido como reacción de
Belousov-Zhabotinsky. Esta es un caballito de batalla en el campo de la formación de estructuras espacio-temporales, y ha sido estudiado experimentalmente en detalle. Se trata de un proceso
quı́mico en el que un compuesto orgánico, el ácido malónico, se oxida mediante iones de bromato
en una reacción catalizada por un compuesto de cerio. El proceso completo puede describirse
mediante 18 reacciones quı́micas elementales, cada una de las cuales puede ser descripta mediante una ecuación diferencial de primer orden (no lineal) para una concentración molecular.
La variable que se estudia habitualmente es la concentración de cerio, ya que la diferencia entre
Ce4+ y Ce3+ puede ser observada con un colorante. En la figura vemos una realización caótica
de este experimento, caracterizada por una función de correlación:
1
T →∞ T
C(τ ) = lı́m
donde
Z T
0
ĉ(t)ĉ(t + τ )dt,
1
ĉ(t) = c(t) − lı́m
T →∞ T
Z T
0
c(t)dt.
(3)
(4)
Esta función mide la correlación entre la “señal” (la órbita, la trayectoria) a tiempos sucesivos. Para un comportamiento regular, la función de correlación permanece constante u oscila,
mientras que decae, en general exponencialmente, si el comportamiento es caótico, ya que la
señal pierde la información de estados anteriores del sistema. Como se ve, esta caracterización
involucra también un lı́mite para tiempo infinito, como el análisis de Fourier.
El último ejemplo de la Tabla y Figura 1 es un sistema no integrable de la mecánica clásica.
Hénon y Heiles descubrieron su comportamiento caótico al analizar el mapeo de Poincaré del
sistema. Observaron que, para una energı́a superior a un umbral, la órbita del mapeo llena de
manera densa el espacio de fases, a diferencia de un sistema periódico en el que las órbitas se
limitan a puntos aislados.
Otra propiedad caracterı́stica de los sistemas caóticos, y que no está representada en los
ejemplos anteriores, es el mezclado (mixing), que puede definirse de la siguiente manera. Tómese
un volumen finito A en el espacio de las fases, y considérense todos los (infinitos) estados del
mismo como condiciones iniciales de un conjunto de réplicas del sistema. Al evolucionar, las
órbitas de estas réplicas cubren un dominio D en el espacio de las fases, finito si las órbitas
5
son acotadas. Tómese ahora un segundo volumen B ⊂ D. La dinámica posee la propiedad de
mezclado si, a tiempos asintóticamente largos, el número (mejor dicho la fracción) de sistemas
con condiciones iniciales en A que se encuentran en B es finito y constante. Esta fracción depende
por supuesto del tamaño de B, en particular de su relación con D, pero no depende del tiempo,
aun cuando los sistemas del ensamble están entrando y saliendo de B todo el tiempo. Más aun, la
fracción de réplicas en B es independiente de la posición de A y de B en D. En otras palabras, el
volumen ocupado por el ensamble resulta tan distorsionado por la dinámica que, eventualmente,
acaba ocupando todo el espacio disponible con una densidad constante. Esta propiedad es la
que permite una de las caracterizaciones más poderosas del estado caótico: la medida invariante.
Los sistemas periódicos y cuasiperiódicos, en contraste, no exhiben esta propiedad.
Regresemos a la primera caracterización que dimos de un sistema caótico, la sensibilidad a las
condiciones iniciales. Mientras la no-periodicidad y el mezclado son, como se señaló, propiedades
globales del sistema caótico, en el sentido de que se refieren a la naturaleza de la trayectoria
en un lapso de tiempo infinito, la más conocida, y tal vez al más útil propiedad de un sistema
caótico es de carácter local, es decir definida sobre un intervalo infinitesimal de la trayectoria. Se
trata de la separación exponencial de las órbitas, responsable de la sensibilidad a las condiciones
iniciales.
Considérense dos condiciones iniciales, xa (0) y xb (0) = xa (0)+δx(0), que difieren en una cantidad pequeña δx(0). Al pasar el tiempo, cada una da lugar a órbitas xa (t) y xb (t) = xa (t)+δx(t).
Si es sistema es caótico, entonces la separación entre las dos órbitas crece exponencialmente:
|δx(t)| = |δx(0)| exp Λt,
(5)
donde Λ es una constante. El alumno atento observará que tal separación exponencial no es
una propiedad exclusiva de un sistema caótico. Por ejemplo, el sistema lineal ẋ = Λx tiene la
propiedad (5). Sin embargo, en este caso las órbitas no están acotadas sino que divergen. Sólo
en sistemas caóticos, la separación exponencial se encuentra en órbitas acotadas. Ciertamente,
en tal caso el comportamiento exponencial no puede durar para siempre. En cierto momento,
los efectos no lineales del sistema entran en acción y las órbitas se retuercen dentro de su
dominio. La separación exponencial local, y la acotación global de las trayectorias debido a las
no linealidades, parecen ser los dos efectos que, combinados, proveen la complejidad evidente en
la órbita caótica.
6
2.
El mapeo logı́stico
Vamos a estudiar en algún detalle el mapeo logı́stico xn+1 = f (xn ) = rxn (1 − xn ), que
puede interpretarse como un modelo de población en un sistema en el que los recursos son
limitados. El crecimiento exponencial dado por la parte xn+1 = rxn resulta limitado por la nolinealidad −rx2n , que representa la competencia entre los individuos por los recursos compartidos.
En 1976, el biólogo Robert May observó, en un artı́culo en Nature, que las órbitas de este
sistema tienen un comportamiento muy complejo, y recomendaba estar alerta, no solamente en
el ámbito académico sino también el la vida cotidiana, a estos sistemas aparentemente sencillos
cuyo comportamiento dinámico no es tal [6].
0.6
0.5
f(x)
0.4
f(x) = 2 x (1-x)
0.3
0.2
0.1
0.0
0.0
0.1
0.2
0.3
0.4
0.5
0.6
x
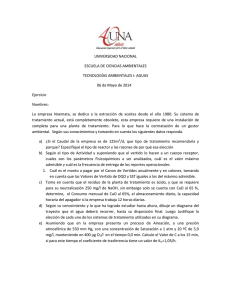
Figura 2: Gráfico cobweb de una órbita del mapeo xn+1 = 2xn (1 − xn ), con x(0) = 0,1.
Comencemos estudiando el caso r = 2, es decir xn+1 = 2xn (1 − xn ). Cuando la población
es pequeña, ésta se duplica en cada paso de tiempo. Representemos el sistema en un gráfico
llamado cobweb, en el cual se grafican simultáneamente la función f (x) y la función identidad
(figura 2). Una observación inmediata en este tipo de gráfico son los puntos fijos del mapeo,
que son obviamente los puntos de intersección de ambas curvas, donde f (x) = x. Una órbita se
representa partiendo de una condición inicial x0 en las abscisas, y dibujando una lı́nea vertical
hasta su imagen f (x0 ). A continuación, se debe convertir este valor en una nueva preimagen de
f , lo cual se hace dibujando una lı́nea horizontal hasta la diagonal que representa la identidad.
Estos dos pasos se repiten, generando la representación de la órbita. La figura 2 muestra una
órbita que comienza con la condición inicial x(0) = 0,1, y que converge al punto fijo x = 0,5.
Podemos ver gráficamente que uno de los puntos fijos, x = 0, repele las órbitas, mientras
que el otro, x = 1, las atrae. Algebraicamente, la condición de estabilidad de un punto fijo x∗
de un mapeo (suave) f es:
1. Si |f 0 (x∗ )| < 1, entonces x∗ es un sumidero (sink ).
2. Si |f 0 (x∗ )| > 1, entonces x∗ es una fuente (source).
La estabilidad de un punto fijo no puede determinarse sólo por la derivada cuando ésta es
igual a 1.
Consideremos ahora el mapeo logı́stico xn+1 = 3,3x(1−x). Los (únicos) puntos fijos son ahora
x = 0 y x = 0,6969 . . .. Ambos son inestables, ya que f 0 (0) = 3,3 > 1 y f 0 (0,69 . . .) = −1,3 < −1.
¿Si no hay puntos fijos que puedan atraer a las órbitas, a dónde van las órbitas? La figura 3
muestra que existe un perı́odo-2 (estrictamente, una órbita periódica de perı́odo 2 ).
7
0.8
f(x) = 3.3 x (1-x)
f(x)
0.6
0.4
0.2
0.0
0.0
0.2
0.4
x
x1
0.6
0.8
x2
Figura 3: Gráfico cobweb de una órbita del mapeo xn+1 = 3,3xn (1 − xn ), mostrando una órbita
que es atraı́da por el perı́odo-2 {x1 , x2 }.
Puesto que f (x1 ) = x2 = f (f (x1 )) y que f (x2 ) = x1 = f (f (x2 )), la órbita de perı́odo 2 es un
punto fijo del mapeo xn+1 = f (f (xn )) = f 2 (xn ), de manera que podemos estudiar su estabilidad
mediante la derivada de f 2 , que se calcula como:
(f 2 )0 (x) = f 0 (f (x))f 0 (x).
(6)
En el presente caso: (f 2 )0 (x1 ) = f 0 (x2 )f 0 (x1 ) = (f 2 )0 (x2 ) = −0,2904. Es decir, el perı́odo-2 es
estable, y atrae a las órbitas.
Para el mapeo xn+1 = 3,5x(1 − x), la situación de nuevo cambia. Los puntos fijos son x = 0
y x = 5/7, ambos inestables. Existe un perı́odo-2 (punto fijo de f 2 ) en {3/7, 6/7}, pero también
es inestable. ¿A dónde van las órbitas? Una nueva duplicación del perı́odo ha hecho aparecer un
perı́odo-4, que resulta ser estable.
Comenzamos a ver cómo están relacionados los mapeos miembros de la familia xn+1 =
rx(1 − x): están conectados por sucesivas bifurcaciones de perı́odo, controladas por el parámetro
r. Los rangos de r donde cada tipo de órbita es estable pueden analizarse fácilmente mediante
el criterio de la derivada, al menos para los perı́odos bajos. La primera √
bifurcación, del punto
fijo al perı́odo-2, sucede a r = 3. La del perı́odo-2 al perı́odo-4, a r = 1 + 6 ≈ 2,451 . A medida
que r crece entre 3,55 y 4, las órbitas se vuelven más y más complicados. Resulta conveniente
graficar el comportamiento de la familia completa en un diagrama de bifurcaciones, en el cual
se grafican los puntos fijos, periódicos o de otra naturaleza que atraen a una órbita, en función
del parámetro r. Este diagrama se ve en la figura 4.
Se ven claramente las primeras bifurcaciones: perı́odo-2, perı́odo-4 y perı́odo-8. La resolución
del gráfico no permite ver las bifurcaciones a perı́odos más altos, pero eventualmente puede
observarse que los puntos de bifurcación se acumulan en un valor r∞ ≈ 3,51. Más allá de este
punto aparecen órbitas no periódicas, que a simple vista se ven como llenando al azar un subintervalo continuo del intervalo [0, 1]. Estos conjuntos atractores son atractores caóticos, mucho
más difı́ciles de describir que los atractores periódicos. Aparecen a un valor (finito) r∞ del
parámetro de control, punto donde se acumulan las bifurcaciones y el número de puntos fijos se
vuelve infinito (y todos inestables!). Una imagen más detallada del diagrama de bifurcaciones, en
la figura 5, muestra la existencia de “ventanas” de comportamiento periódico para algunos valores
de r > r∞ . La más grande y evidente es una ventana de perı́odo-3, que surge abruptamente
de la región caótica (una “crisis”), y desaparece mediante una nueva cascada de bifurcaciones
1
Ejercicio: Encontrar r1 , r2 y r3 (con el Mathematica, por supuesto!)
8
1.0
0.8
0.6
x
0.4
0.2
0.0
1.0
1.5
2.0
2.5
3.0
3.5
4.0
r
Figura 4: Diagrama de bifurcaciones del mapeo logı́stico xn+1 = rx(1−x). Para valores de r < 1,
el único punto fijo es x = 0.
a órbitas de perı́odos 6, 12, etc. Existen ventanas periódicas de perı́odo arbitrariamente alto,
ventanas arbitrariamente estrechas que le dan al diagrama una infinita riqueza de detalle.
1.0
0.8
0.6
x
0.4
0.2
0.0
3.5
3.6
3.7
3.8
3.9
4.0
r
Figura 5: Detalle del diagrama de bifurcaciones del mapeo logı́stico xn+1 = rx(1−x), mostrando
la existencia de ventanas de comportamiento periódico en medio de la región de caos.
Obsérvese también cómo los puntos periódicos (de todos los perı́odos), a pesar de haberse
hecho inestables, siguen existiendo y se manifiestan con una densidad de puntos más alta en las
órbitas caóticas. En particular, hay un punto donde convergen varios de estos puntos periódicos
(r ∼ 3,67) donde la densidad es particularmente alta, y que es también el punto donde se unen
dos “bandas” de órbitas caóticas. El punto fijo (inestable, claro está) también pasa por allı́, y de
allı́ en adelante parece “repeler” a las órbitas caótica, mostrando una densidad de puntos menor
al resto. En el gráfico cobweb correspondiente a r = 3,86, que se muestra en la figura 6, se ve
claramente esta repulsión.
En 1978, Feigenbaum [3] realizó un descubrimiento sorprendente valiéndose de un invento
reciente: la calculadora de bolsillo. Descubrió que una gran familia de mapeos, similares al
logı́stico, comparten una cantidad de propiedades de escaleo en la manera en que un parámetro
controla la aparición de caos. Estas propiedades “universales” son las siguientes (véase la figura
9
1.0
0.8
f(x)
0.6
0.4
0.2
f(x) = 3.86 x (1-x)
0.0
0.0
0.2
0.4
0.6
0.8
1.0
x
Figura 6: Cobweb del mapeo logı́stico para r = 3,86.
7 para la notación):
1. Régimen periódico
Las bifurcaciones, donde el número de puntos fijos cambia de 2n−1 a 2n , ocurren en puntos
rn que satisfacen:
rn = r∞ − c δ −n , con n À 1 y c constante.
(7)
Las distancias dn del punto de un perı́odo-2n que esté más cerca a x = 1/2, de dos perı́odos
consecutivos, tienen cociente constante:
dn
= −α,
dn+1
para n À 1.
(8)
Las constantes de Feigenbaum α y δ tienen valores universales:
α = 2,5029078750 . . .
(9)
δ = 4,6692016091 . . .
(10)
Los puntos Rn escalean de manera similar a los rn :
Rn = R∞ + c0 δ −n ,
(11)
R∞ = r∞ = 3,5699456 . . .
(12)
y además
2. Régimen caótico
Las ventanas de comportamiento regular tienen perı́odo p (p = 3, 5, 6, . . .), y sufren
bifurcaciones a perı́odos p 2n , caracterizadas por la misma ley (7), con el mismo δ.
Triplicaciones p 3n , cuatriplicaciones p 4n , etc, ocurren en puntos r̂n que satisfacen nuevamente la ley (7), con distintas constantes, también universales (por ejemplo δ̂ = 55,247 . . .
para las triplicaciones).
10
d1
x
d3
1/2
d2
r1
r2
R1
R2 r3 R3
Figura 7: Diagrama de bifurcaciones esquemático, mostrando la notación de las propiedades de
escaleo de la cascada de bifurcaciones.
1
1
1
(a) r = 0.8
(b) r = 2.8
f
(c) r = 3.28
f
0
0
x
f
0
1
0
^p
x
p
0
1
1
0
(e) r = 3.28
2
f
0
1
p
x
1
(d) r = 2.8
f
^p
0
p^
x
p
1
2
0
0
p^
p1
x
p
p2
1
Figura 8: Gráficos de f y de f 2 ilustrando la idea de autosimilaridad. Cada gráfico de f 2 [(d) y
(e)], restringido al cuadrado que se indica, es similar al gráfico de f de la columna anterior [(a)
y (b)].
11
2.1.
Cascada de bifurcaciones
Vamos a esbozar algunos de los conceptos más importantes en el análisis cuantitativo de la
cascada de bifurcaciones que caracteriza tanto al mapeo logı́stico como a muchos otros sistemas.
Como en muchos temas centrales de la teorı́a del caos, el análisis está basado en una propiedad
de auto-similaridad, que permite una operación de renormalización.
Observemos en la figura 8 la idea de la autosimilaridad. En las figuras 8(a), (b) y (c) vemos el
gráfico de f correspondiente a tres valores del parámetro r: en (a) existe sólo el equilibrio trivial
x∗ = 0; en (b) existe un equilibrio positivo estable p; en (c) el equilibrio positivo p es inestable.
En la lı́nea inferior de la figura vemos los gráficos correspondientes a la segunda iteración, f 2 ,
para los mismos valores de los parámetros. Vemos que cuando f tiene un sólo equilibrio estable
p, f 2 también tiene un sólo equilibrio no trivial, que coincide con p [figuras (b) y (d)]. En cambio,
cuando el equilibrio de f es inestable, f 2 tiene tres equilibrios: p, p1 y p2 [figuras (c) y (e)]. Como
sabemos, estos últimos definen el perı́odo-2 estable de la segunda bifurcación.
Sea p̂ la preimagen de p según f , es decir f (p̂) = p. Observemos el gráfico de f 2 restringido
al intervalo [p̂, p], indicado con un cuadrado en las figuras (d) y (e). Puede observarse, sin entrar
en demostraciones, que el intervalo [p̂, p] es invariante a la acción de f 2 , tal como el intervalo
[0, 1] es invariante a f . Además, observemos que, a pesar de las marcadas diferencias entre f y
f 2 (número de extremos, etc.), el gráfico de f 2 restringida a [p̂, p] es parecido al gráfico de f
correspondiente a otro valor de r. En efecto, obsérvese que dentro del cuadradito en la figura
(d), f 2 tiene un solo punto fijo, ubicado en uno de los extremos del intervalo, y un solo extremo
en el medio del intervalo, precisamente como f en la figura (a). Similarmente, en la figura (e) f 2
restringida al cuadradito tiene un punto fijo estable positivo, y el punto fijo trivial inestable en
el extremo del intervalo, tal como f en la figura (b). En esta situación, decimos que los gráficos
de f 2 restringidos al intervalo [p̂, p] son similares a los de f en [0, 1], mediando una reflexión
izquierda-derecha, una arriba-abajo y un cambio de escala.
De la misma manera podrı́amos analizar el gráfico de f 4 , que resultarı́a similar al de f 2 ,
y ası́ sucesivamente para todos los órdenes de iteración. Esto sugiere que existe una función
universal, a la cual tienden todas estas funciones, que eventualmente se podrá encontrar.
Para avanzar en el análisis cuantitativo, construyamos una función lineal que lleve el punto
p al 0 y a su preimagen p̂ al 1:
Lr (x) =
1
(x − pr ),
p̂r − pr
(13)
donde estamos mostrando explı́citamente que todas las cantidades dependen de r. La función
inversa de L se obtiene de (13) despejando x:
L−1
r (x) = pr + (p̂r − pr ) x.
(14)
Definimos ahora un operador de renormalización que actúa sobre la función fr (x), con la
idea de que la acción de éste contenga la idea de autosimilaridad de las f k :
h
i
Rfr (x) = Lr fr2 (L−1
r (x)) ,
x ∈ [0, 1].
(15)
contrae el intervalo [0, 1] al [p̂r , pr ] y lo
Obsérvese con cuidado la acción de R: primero L−1
r
invierte, después actúa f 2 , y finalmente Lr vuelve a expandir el intervalito y a orientarlo normalmente. El resultado es la función que, según observamos en la figura 8, es similar a f . En
efecto, se puede chequear sin dificultad que Rfr (x) comparte muchas propiedades de f , en particular la de anularse en los extremos del intervalo, y tener un extremo en x = 1/2. También
convierte órbitas de perı́odo 2 de f en puntos fijos de Rf , etcétera, etcétera.
Ciertamente, sabemos (o sospechamos) que el fenómeno de autosimilaridad no se detiene
en f 2 , ası́ que podemos continuar con el proceso de renormalización, renormalizando todos los
órdenes de f . Definamos:
h
i
gk (x) = L f k (L−1 (x)) ,
(16)
12
de manera que se satisface
gk = R gk−1 .
(17)
Vemos que gk , a medida que k crece, va heredando la forma de las iteraciones inferiores. Ahora,
si existe el lı́mite del que hablábamos en relación con la figura 8, este lı́mite es
lı́m gk (x) = g(x),
(18)
k→∞
la función universal que estamos buscando, y la manera de buscarla es mediante la ecuación que
satisface, o sea (17) llevada al lı́mite:
g(x) = Rg(x).
(19)
Es decir, g(x) es un punto fijo del operador de renormalización R, en el espacio de las funciones
de variable real. Escribámoslo in extenso:
g(x) = −α g[g(−x/α)],
(20)
donde α es el factor de escaleo (p̂r − pr ) de la ec. (13) y hemos cambiado a un sistema de
coordenadas en el que el origen coincide con el punto fijo pr .
La solución de la ec. (20) puede ser aproximada sucesivamente mediante un desarrollo en serie
de g. Primero se elige g(0) = 1, y luego se propone una función par a determinar, g(x) = 1+b x2 :
!2
Ã
!
2
x
2
2
1 + bx = −α 1 + b 1 + b 2 = −α 1 + b + 2b 2 + o(x4 ).
Ã
x2
α
α
(21)
De aquı́, identificando los coeficientes de igual potencia en x, obtenemos b ≈ −1,366 y α ≈ 2,73,
un resultado aproximado al valor “exacto” de α encontrado numéricamente (10). La aproximación puede mejorarse tomando órdenes superiores en el desarrollo de g.
Sin entrar en detalles, observemos que el operador R define un mapeo—en el que k juega el
papel de un tiempo discreto—que puede analizarse mediante todas las técnicas de los mapeos.
En particular, se encuentra que el punto fijo g es un punto de ensilladura, a lo largo de cuya
variedad estable nos acercamos en cada iteración. El autovalor a lo largo de la dirección estable
nos dice cómo nos acercamos al punto crı́tico, y describe precisamente cómo se acercan los
sucesivos puntos de bifurcación, ya que R convierte perı́odos-2k de f en perı́odos-2k−1 de Rf .
Este autovalor resulta ser δ ≈ 4,669201, que describe como se acercan los sucesivos rn a r∞ (ec.
(7)).
El poder de las ideas de renormalización reside en que, apropiadamente adaptadas, pueden
ser usadas en una variedad de problemas. Por ejemplo, el razonamiento que hemos usado no
está restringido al mapeo logı́stico, sino que se basa en la propiedad de autosimilaridad de f
ejemplificada en la figura 8, compartida por una enorme familia de mapeos de una variable con
un máximo no degenerado. En un caso ası́, se habla de universalidad. Ideas similares pueden
aplicarse a otras rutas al caos, distintas de la cascada de bifurcaciones, tal como la intermitencia,
en donde se puede calcular el tiempo pasado por la trayectoria cerca del punto fijo inestable.
Las leyes de escaleo y los demás aspectos cuantitativos de esta descripción han sido ampliamente confirmados en experimentos en sistemas quı́micos, fluidos y lásers, justificando a
posteriori la utilidad del estudio del caos basado en los mapeos de Poincaré, y sugiriendo la
universalidad de los mecanismos subyacentes al origen del caos en una variedad de fenómenos
naturales.
2.2.
Descripción probabilı́stica del régimen caótico
Pasemos a estudiar el régimen caótico del mapeo logı́stico, correspondiente a valores del
parámetro r∞ < r ≤ 4. Por diversas razones, resulta adecuado un tratamiento probabilı́stico del
13
problema. Por un lado, vimos en los experimentos numéricos que algunas regiones del espacio
de fases resultan más visitadas por el espacio de fases que otras, de manera que una descripción
basada en una densidad de probabilidad parece adecuada. Por otro lado, supongamos un proceso
de medición en el que se tenga una resolución finita. En tal caso el “estado” del sistema debe
entenderse no como un punto sino como una pequeña región en el espacio de fases. Si la dinámica
del sistema subyacente fuese simple, regular, no habrı́a diferencia entre una descripción puntual
y una deslocalizada del problema, para una resolución suficientemente buena. Sin embargo, si la
dinámica es caótica, sabemos que condiciones iniciales arbitrariamente cercanas acaban siguiendo
trayectorias diferentes, cuya diferencia tiene tı́picamente el tamaño del atractor mismo. La única
manera de resolver esta dificultad consiste en adoptar una descripción probabilı́stica, en la cual
la magnitud central es una densidad de probabilidad ρn (x) de encontrar al sistema en el estado
x a tiempo n.
Si el estado inicial del sistema, x0 , se conoce con precisión infinita, decimos que el sistema
está descripto por la densidad ρ0 (x) = δ(x − x0 ). Al tiempo siguiente el estado será ρ1 (x) =
δ(x − f (x0 )), y ası́ sucesivamente. Supongamos, en cambio, que ρ0 (x) es una función suave
de x. Después de una iteración el estado del sistema será una superposición de los estados
correspondientes a la evolución de cada condición inicial representada por ρ0 . Es decir, podemos
escribir:
Z
ρn+1 (x) =
δ(x − f (x0 )) ρn (x0 ) dx0 ,
(22)
E
donde integramos sobre todo el espacio de fases E.
La solución estacionaria de la ec. (22), ρs (x), recibe el nombre de densidad (o medida) de
probabilidad invariante, y sus propiedades permiten clasificar los sistemas dinámicos de una
manera muy general. Comencemos con un caso sencillo, el mapeo lineal a trozos conocido como
“tent map”:
(
2 yn ,
0 ≤ yn ≤ 1/2,
yn+1 = T (yn ) =
(23)
2 − 2 yn , 1/2 ≤ yn ≤ 1.
Su densidad de probabilidad invariante debe satisfacer:
Z
ρs =
=
δ(x − f (x0 )) ρs (x0 ) dx0 ,
E
Z 1/2
0
δ(x − 2x0 ) ρs (x0 ) dx0 +
(24)
Z 1
1/2
δ(x − (2 − 2x0 )) ρs (x0 ) dx0 ,
(25)
cuya única solución suave, integrable Lebesgue, adecuadamente normalizada, es simplemente:
ρs (x) = 1.
(26)
Es decir, en el régimen caótico la probabilidad de encontrar al sistema en un punto del espacio de
fases es uniforme. (Incidentalmente, tenemos aquı́ un algoritmo para generar números pseudoaleatorios con distribución uniforme!)
Ahora bien, el tent map es topológicamente equivalente al mapeo logı́stico para r = 4, siendo
√
h = 2/π arcsin x la función que los relaciona 2 . Entonces tenemos
¯ ¯
¯ dh ¯
¯= 1p 1
,
dx ¯ π x(1 − x)
ρf4 (x) = ρT [h(x)] ¯¯
(27)
que se ve en la figura 9. Para valores de r entre r∞ y 4, la densidad invariante tiene un soporte
formado por uno o varios segmentos (cuyas longitudes, una vez más, satisfacen propiedades de
escaleo universales) con varios picos. La densidad de puntos representados en el diagrama de
bifurcaciones (fig. 4) da una idea de la forma de la medida invariante para los distintos valores
de r.
2
Ejercicio: Demostrar esto. Demostración: f4 [h−1 (x)] = sin2 (πx) = h−1 [T (x)].
14
10
8
6
ρf
4
4
2
0
0.0
0.2
0.4
0.6
0.8
1.0
x
Figura 9: Densidad de probabilidad invariante del mapeo logı́stico para r = 4.
Recordemos ahora la definición de un conjunto invariante: un conjunto tal que coincide con
su imagen para todo tiempo. Los sistemas dinámicos tales que todos sus conjuntos invariantes
son o bien triviales o bien todo el espacio de fases se llaman ergódicos. En otras palabras, el
espacio de fases de un sistema ergódico no puede descomponerse en subconjuntos invariantes de
una manera no trivial. Un teorema (Lasota y Mackey, 1985) asegura que un sistema es ergódico
si y sólo si tiene exactamente una densidad invariante que sea suave e integrable Lebesgue y
positiva en casi todo el espacio de fases. El tent map y el mapeo logı́stico con r = 4 resultan
ser ergódicos, entonces. Una propiedad de las densidades invariantes de los sistemas ergódicos
es que resultan estar extendidas a todo el espacio de fases, a pesar de la dinámica puramente
determinista que las genera. Como consecuencia de esto, las fluctuaciones alrededor de valores
medios resultan ser del orden de los valores medios mismos, a diferencia de lo que sucede en
sistemas termodinámicos en los que la distribución de probabilidad es picuda alrededor de los
estados más probables, excepto en la inmediata vecindad de los puntos crı́ticos de las transiciones
de fase. En cierto sentido, un sistema caótico como el logı́stico a r = 4 puede pensarse como un
sistema que se encuentra permanentemente en el estado crı́tico. De hecho, existe una profunda
analogı́a entre la dinámica caótica y las transiciones de fase, que se escapa a esta monografı́a.
15
3.
El sistema de Lorenz
En 1963 Edward Lorenz estudió un modelo de la atmósfera [5], consistente en una capa de
fluido convectivo calentada por debajo. Luego de una serie de simplificaciones, las ecuaciones
del modelo son:
ẋ = −σx + σy,
(28)
ẏ = rx − y − zx,
(29)
ż = −bz + xy,
(30)
donde x, y, y z son componentes de Fourier de los campos de velocidad y temperatura, y r, b y σ
son parámetros positivos que caracterizan propiedades fı́sicas del fluido. Este sistema dinámico,
con tres variables y tres parámetros, tiene una variedad de soluciones de estructura complicada
que sólo esbozaremos aquı́ para ilustrar el desarrollo del caos por un mecanismo distinto de la
cascada de bifurcaciones.
Dejemos de lado el origen fluidodinámico de las ecuaciones, que puede consultarse en la
bibliografı́a, ası́ como la interpretación fı́sica de los parámetros. Digamos solamente que vamos
a utilizar a r como parámetro de control, dejando a los otros fijos en valores caracterı́sticos.
La localización de los equilibrios y el análisis de su estabilidad lineal es bastante fácil, ası́ que
nos limitaremos a exponer los resultados y esquematizar un diagrama de bifurcaciones. Se encuentran los siguientes equilibrios:
x = y = z = 0,
para todo r,
(31)
y los puntos que llamaremos C y C 0 :
p
x = y = ± b(r − 1),
z = r − 1,
(32)
que existen para r > 1. A r = 1 hay una bifurcación pitchfork de la solución nula a las soluciones
C y C 0 , ubicadas simétricamente con respecto al eje z.
El análisis de estabilidad lineal muestra que la solución nula es estable si r < 1 e inestable
si r > 1, con dos autovalores negativos y uno positivo, ası́ que es un punto de ensilladura
tridimensional.
Los puntos C y C 0 , a su vez, resultan ser estables para r > 1 hasta que se alcanza cierto
valor rc (si σ > b + 1, si no se mantienen estables siempre) y son inestables para r > rc . Donde
son inestables, C y C 0 tienen dos autovalores complejos conjugados con parte real positiva,
mientras que el tercer autovalor es real y negativo, de manera que las trayectorias se acercan
a los equilibrios en una dirección, pero se alejan en forma espiral a lo largo de una variedad
inestable de dimensión 2. Más aún, los autovalores complejos aparecen debajo de rc , de tal
manera que en rc ocurre una bifurcación de Hopf-subcrı́tica, en la que los ciclos lı́mites son
inestables mientras que los puntos fijos son estables. Los ciclos lı́mites aparecen para r > r0 > 1,
de manera que son siempre inestables, pero su presencia se hace sentir. Cuando r > rc no existe
ningún atractor aparente, al menos hasta llegar a valores bastante más grandes de r. En la fig.
10 se muestra un diagrama de bifurcaciones esquemático, proyectado en el eje x del sistema.
Varios resultados accesorios, cada uno aparentemente muy pequeño, van contribuyendo a
formar un cuadro de fases para distintos valores de r. Por ejemplo, puede construirse algo
parecido a una función de Lyapunov: g(x, y, z) = 12 [x2 + y 2 + (z − r − σ)2 ], y demostrarse que
d
g(x, y, z) < 0
dt
cuando ~x → ∞,
(33)
de manera que las órbitas en el infinito se mueven hacia el punto (0, 0, r + σ) (o sea a una
vecindad del origen)3 .
3
Ejercicio: demostrar esto.
16
x
r1 rc
r0
0
5
10
15
20
25
30
r
Figura 10: Diagrama de bifurcaciones del sistema de Lorenz en el plano x, r, con b = 8/3 y
σ = 10.
Además, divF~ (~x) < 0, de manera que el volumen de un conjunto de puntos en el espacio de
fases tiende a cero4 .
También puede demostrarse que no existen órbitas cuasiperiódicas, ya que las órbitas cuasiperiódicas se mueven sobre un toro, y un toro no puede contener un volumen que tiende a cero
sin tener una fuente en su interior, y no existen fuentes5 .
En resumen, cuando r > rc tenemos que:
Ningún punto de equilibrio es estable.
Todas las órbitas se acercan desde el infinito.
El volumen se encoge.
Ningún atractor tiene volumen finito.
Ninguna órbita es cuasiperiódica.
Existe una bifurcación de Hopf subcrı́tica a r = rc .
Entonces, ¿a dónde van las órbitas? Los experimentos numéricos muestran que van a un
atractor extraño, con una dimensión fractal 2 < D < 3, con aspecto de producto cartesiano
entre un plano y un conjunto de Cantor. Se lo puede visualizar como una órbita que da algunas
vueltas alrededor de C, seguidas de algunas vueltas alrededor de C 0 , y ası́ sucesivamente (figura
11). Alrededor de cada uno de ellos el atractor es bastante plano. De hecho, D ≈ 2,06.
Los cálculos también muestran que dos puntos cercanos en el espacio de fases se separan
exponencialmente, y sus trayectorias acaban perdiendo toda correlación una con la otra, de
manera que existe la propiedad de sensibilidad a las condiciones iniciales.
De hecho, el atractor caótico existe no sólo para r > rc , sino que aparece ya para r1 < r <
rc . En este rango, el atractor caótico coexiste con los atractores C y C 0 . Si se hace oscilar r
cuasiestáticamente en un intervalo que incluya a r1 y a rc , se observa una histéresis. Además,
se observa que el atractor extraño aparece a r = r1 , sin estar asociado a la desestabilización
de otro atractor. Vemos entonces que existen varias diferencias con el caso del mapeo logı́stico.
Sin embargo, existe una similitud que vale la pena mencionar. Para argumentar que el atractor
4
5
Ejercicio: demostrar esto.
Ejercicio: demostrar, pero es más difı́cil.
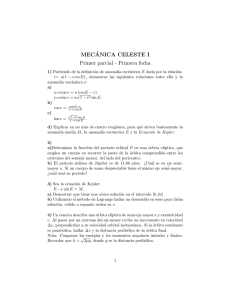
17
Figura 11: Proyección de parte de una órbita caótica del sistema de Lorenz.
del sistema no es periódico, a Lorenz se le ocurrió examinar el comportamiento de los máximos
sucesivos de las trayectorias en la dirección z. Es una manera de reducir la dinámica continua y
tridimensional del sistema completo, a la de un mapeo unidimensional, de manera similar a lo que
se hace con el mapeo de Poincaré. Al graficar estos máximos de manera recurrente, es decir zn+1
vs zn , surge una dependencia funcional muy sencilla: un gráfico casi lineal, con un grosor muy
pequeño. Lorenz fue muy afortunado en este sentido, ya que la imagen podrı́a haber sido muy
diferente. Sin embargo, la brutal contracción del volumen que sufre el sistema de Lorenz produce
este comportamiento (ası́ como la naturaleza casi plana de las trayectorias). En la figura 12 se
muestra esta recurrencia, y puede verse que es muy similar a un tent map en el régimen caótico:
la pendiente es, en módulo, mayor que 1 en todo el intervalo. En consecuencia, cualquier órbita
periódica (atractor o no) debe ser inestable. La idea de graficar este mapeo con los máximos de
z sugiere otra caracterización del sistema: podemos dibujar un diagrama de bifurcaciones de los
máximos de z a medida que r crece. Al hacerlo, puede verse que el régimen caótico desaparece
en una cascada inversa de bifurcaciones (bisecciones, en lugar de duplicaciones de perı́odo), y
que existen ventanas de comportamiento regular, como en la familia de mapeos logı́sticos6 .
Figura 12: Máximos sucesivos de z en el atractor de Lorenz.
A medida que r crece aún más, aparece toda una secuencia de bifurcaciones y atractores,
esquematizada en la figura 13. Para r suficientemente alto el único atractor es un ciclo lı́mite.
Para hacerse una idea de las “causas” del caos en el sistema de Lorenz, lo mejor es una
observación de la geometrı́a de las órbitas en movimiento, para distintos valores de r.
Comencemos por analizar las órbitas en la proximidad de los puntos de equilibrio 0, C y C 0 ,
6
Ejercicio: Hacer un diagrama de bifurcaciones de los máximos de z para r entre 1 y 325.
18
Figura 13: Esquema de los distintos atractores del sistema de Lorenz para b = 8/3, σ = 10, y
0 ≤ r < ∞. EP es un punto fijo estable, LC un ciclo lı́mite, y SA un atractor extraño.
cuando 1 < r < rc . En este caso el 0 es inestable, un punto de ensilladura en tres dimensiones,
con λ1 > 0 > λ2 > λ3 , ası́ que las órbitas se alejan de 0 en una dirección paralela o antiparalela
al autovector u1 asociado al autovalor λ1 , y se acercan al cero por un plano generado por u2
y u3 . La variedad inestable es una curva tangente a u1 en el 0, y la variedad estable es una
superficie tangente al plano mencionado. Ninguna órbita puede cruzar una variedad (excepto
en un punto de equilibrio), de manera que la variedad estable, siendo una superficie, divide al
espacio de fases IR3 en dos partes. Cuando r no es muy grande la forma de la variedad estable es
bastante sencilla, pero para valores mayores de r empieza a retorcerse y no es fácil de visualizar.
Cuando r = 1 el subespacio inestable es el eje z y el plano x-y es el subespacio estable.
Cuando r > 1 aparecen los equilibrios C y C 0 . Al principio, cuando r es apenas mayor que 1,
las trayectorias abandonan la proximidad del origen y acaban en los puntos C o C 0 , dependiendo
de en qué octante comenzaron. Sin embargo, cuando r = r0 , la variedad inestable del origen se
retuerce alrededor de los puntos C y C 0 , y regresa por la variedad estable del mismo. Se establecen
ası́ dos órbitas homoclinas que conectan al 0 con si mismo. Estas órbitas son periódicas, por
supuesto, pero como el origen es un punto de ensilladura el perı́odo es infinito.
En cuanto r crece por encima de r0 , surge de cada homoclina una órbita periódica alrededor
de C o C 0 . Son ciclos lı́mite, con perı́odos finitos, cuya amplitud irá decreciendo a medida que
r crezca, terminando por coalescer con C y C 0 cuando r alcance rc (la bifurcación de Hopf
subcrı́tica). Para σ = 10 y b = 8/3 se tiene r0 = 13,93 aproximadamente. Como son inestables,
los ciclos lı́mite repelen a la variedad inestable del 0, de manera que las órbitas que salen cerca
del 0 (si bien no sobre la homoclina) desde octante donde se encuentra C, acaban no en C sino
en C 0 , hacia donde se acercan en espiral. Pero a medida que crece r, los ciclos lı́mite se estrechan
en torno a los puntos espiral, de manera que una trayectoria que fue rechazada por el ciclo lı́mite
de C y se dirige a C 0 , pasa cerca del ciclo lı́mite de éste, que la rechaza y la obliga a volver hacia
C, y ası́ más y más veces antes de caer en uno de los puntos espirales, a medida que r se acerca
a rc . Esta situación puede ser difı́cil de distinguir del caos, y a veces se la llama precaos o caos
transitorio.
Figura 14: Esquema de la variedad inestable del origen en el sistema de Lorenz. (a) Para r = r0 ,
mostrando la órbita homoclina. (b) Para r = r1 , la órbita homoclina se rompe, y se forman dos
órbitas heteroclinas conectando el origen con los ciclos lı́mite.
19
Casi todas las órbitas terminan espiralando hacia C o C 0 en este régimen, ya que estos son
los únicos equilibrios estables. La excepción son las que están sobre las variedades estables de
los ciclos lı́mite, y las órbitas homoclinas del cero. Pero cuando r = r1 la órbita homoclina se
rompe, y se establecen dos órbitas heteroclinas que conectan la variedad inestable del cero con
los ciclos lı́mites (cuando t → ∞). Este evento marca la aparición de un nuevo atractor, que
resulta caótico y que, mientras r1 < r < rc , coexiste con los puntos espirales, ya que estos siguen
siendo estables. Cuando r > rc los puntos C y C 0 se vuelven inestables, y queda sólo el caos.
Esta descripción del esqueleto que soporta a las órbitas caóticas tal vez le sirva para visualizar
la trayectoria del sistema en el espacio de fases de tres dimensiones. O escriba su propio programa!
Ejercicio difı́cil: Perturbación de una homoclina y el origen de un ciclo lı́mite. Considere un
sistema plano:
dx
= F (a, x),
(34)
dt
donde F : IR × IR2 → IR2 "se porta bien
# y tiene un punto silla en (0, 0). Por ejemplo, tome
λ1
0
F (a, 0) = 0 y DF (a, 0) =
para todo a, con λ1 , λ2 > 0. Además, suponga que
0 −λ2
hay una órbita homoclina en el primer cuadrante, pasando por 0, cuando a = 0. Demuestre que
existe un ciclo lı́mite estable cuando a es pequeño y positivo. Ciertamente en dos dimensiones no
puede existir caos, pero extendiendo a IR3 este ejercicio, no es difı́cil imaginar cómo una órbita
homoclina puede romperse en una caótica.
20
4.
Caracterización del movimiento caótico
4.1.
Exponente de Lyapunov
El concepto de divergencia exponencial, de sensibilidad a una condición inicial, no es privativo
del caos. Cualquier partı́cula cercana a un máximo de un potencial se alejará exponencialmente
de éste. Un par de partı́culas en posiciones cercanas se alejarán exponencialmente entre si.
Después de un tiempo, si el movimiento es acotado, acabarán acercándose exponencialmente a
un mı́nimo, o a una solución periódica si la hubiera. También en un mapeo, una condición inicial
cercana a un punto fijo inestable se aleja, inicialmente, de manera exponencial. En cada iteración
multiplica su distancia al punto inestable p en un factor |f 0 (p)| > 1. A la larga, si resulta atraı́do
hacia un punto q, se acercará a éste en un factor |f 0 (q)| (que resultará ser menor que 1) en cada
iteración.
Una órbita caótica es una órbita a la que le ocurre esto siempre. Es decir, se comporta como si
estuviera cerca de un punto inestable siempre, por los siglos de los siglos. Nunca logra encontrar
un sumidero o un ciclo que la atraiga. En cada punto de una tal órbita, hay otros puntos,
arbitrariamente cercanos que se alejarán exponencialmente de ella. Es este comportamiento
sostenido lo que se caracteriza con los exponentes de Lyapunov. El caos está caracterizado por
un exponente de Lyapunov mayor que 0.
Vamos a definir el número de Lyapunov como la divergencia promedio por paso a lo largo
de la órbita. Obsérvese que decimos promedio, de manera que permitiremos que, a veces, dos
órbitas cercanas se acerquen, aún un un sistema caótico. En promedio, sin embargo, se alejarán.
Para un punto fijo (inestable) p y un punto x cercano, entonces, la distancia después de la primera iteración se incrementa aproximadamente en |f 0 (p)|, y en el mismo factor para iteraciones
sucesivas. El número de Lyapunov es |f 0 (p)|.
Para un punto periódico (inestable) de perı́odo k debemos mirar la derivada de f k , ya que
un punto de perı́odo k de f es un punto fijo de f k . Por la regla de la cadena, ésta es el producto
de las derivadas de f en los k puntos de la órbita: |f 0 (p1 )f 0 (p2 ) . . . f 0 (pk )| = A > 1. Es decir,
después de k iteraciones la órbita iniciada cerca de uno de los puntos del ciclo se ha alejado en
un factor A. Es decir, en promedio, en cada iteración se aleja un factor A1/k . Este es el número
de Lyapunov.
Queremos generalizar este concepto para órbitas que no sean ni puntos fijos ni ciclos. Entonces
multiplicamos la derivada a lo largo de la órbita x0 , x1 , . . ., pero como ésta no es (necesariamente)
periódica es necesario definir el número de Lyapunov como un lı́mite:
L(x0 ) = lı́m (|f 0 (x0 )f 0 (x1 ) . . . f 0 (xn )|)1/n ,
n→∞
(35)
si el lı́mite existe, y el exponente de Lyapunov como su logaritmo natural:
Λ(x0 ) = lı́m
n→∞
1
ln |f 0 (x0 )f 0 (x1 ) . . . f 0 (xn )|.
n
(36)
Por ejemplo, para el tent map, que es lineal a trozos, podemos calcular el exponente de
Lyapunov explı́citamente. La derivada de la iteración n-ésima vale (2r)n en casi todos los puntos7
de manera que el exponente de Lyapunov vale
Λ = log 2r
(37)
independientemente del punto donde comience la órbita. Para el caso extremo en que r = 1 (el
caso topológicamente equivalente al mapeo logı́stico con r = 4) tenemos Λ = log 2 > 0, es decir
sensibilidad exponencial a las condiciones iniciales. En general, tenemos que Λ cambia de signo
en r = rc = 1/2, indicando la transición al caos. Existe una clara analogı́a con las transiciones
7
Ejercicio: calcularla.
21
Figura 15: Diagrama de bifurcaciones y exponentes de Lyapunov del mapeo logı́stico.
de fase de la mecánica estadı́stica, ya que el exponente pasa de negativo a positivo, sirviendo
como parámetro de orden del sistema, comportándose como
Λ ∝ (r − rc ).
(38)
Para mapeos más complicados el exponente de Lyapunov debe calcularse numéricamente.
El gráfico de Λ en función de r correspondiente al mapeo logı́stico se muestra en la figura 15.
Puede verse cómo el exponente pasa de valores negativos en las regiones regulares a positivo
en las regiones caóticas, haciéndose cero en los puntos de bifurcación. En la región caótica se
ven las ventanas de comportamiento regular, en las que λ vuelve a hacerse negativo. Se ven
también puntos en los que el exponente de Lyapunov es menos infinito. Estos puntos se llaman
“súper estables” ya que son los más alejados del caos. La estructura del gráfico es claramente
autosimilar e infinitamente detallada, tal como el diagrama de bifurcaciones.
Para mapeos en dimensiones mayores, basta observar que el comportamiento general será eventualmente de estiramiento en algunas direcciones y de encogimiento en otras. Es decir, un circulito de condiciones iniciales se deformará en una elipse después de n iteraciones. Alguno de
los semiejes de la elipse puede ser mayor que el radio del circulito inicial, y el otro menor, por
ejemplo. En tres dimensiones, una esferita resultará deformada en un elipsoide, etcétera. En
estos casos, resulta necesario definir un número de Lyapunov (y un exponente de Lyapunov) en
cada dirección de estiramiento o encogimiento. La definición de órbita caótica para mapeos en
dimensión mayor que 1 requiere solamente que al menos uno de los exponentes de Lyapunov sea
mayor que 0.
La generalización de las definiciones para sistemas continuos es fácil. Simplemente, dado un
22
sistema dinámico ẋ = f (x), utilizamos el mapeo de Poincaré definido como φT (x) = x(kT )
donde T es un tiempo arbitrario. Los números y los exponentes de Lyapunov del flujo se definen
como los del mapeo asociado. La definición es tan sencilla que oculta las dificultades de calcular
los exponentes de Lyapunov en la práctica, pero dejaremos estas para que las afronte cada uno
de Uds. cuando llegue el momento.
Resulta destacable el hecho de que el exponente de Lyapunov mide la pérdida promedio
de la información acerca de la posición del punto x0 en el espacio de fases en una iteración.
Supongamos que el espacio de fases es el intervalo [0, 1]. Dividámoslo en n intervalitos iguales, y
supongamos que el punto x0 puede estar en cualquiera de ellos con igual probabilidad pi = 1/n.
Si sabemos en qué intervalo está x0 , ganamos la información
I0 = −
n
X
pi log2 pi = −
i=1
n
X
1
i=1
n
log2
1
= log2 n.
n
(39)
Si reducimos n, la información se reduce, haciéndose cero para n = 1: si hay un sólo intervalo,
no se gana información identificando en cuál está x0 .
Un mapeo lineal f (x) cambia la longitud de los intervalos en [0, 1] por un factor constante
a = f 0 (x) = f 0 (0). En consecuencia, la aplicación del mapeo produce un cambio en la información
sobre la ubicación de la imagen del punto x0 :
∆I = −
n/a
X
a
i=1
n
log2
n
a X
1
1
+
log2 = − log2 a = − log2 |f 0 (0)|.
n i=1 n
n
(40)
Generalizando esta expresión a un mapeo no lineal, en el que la derivada varı́a punto a punto,
y promediando en muchas iteraciones, podemos escribir:
X
1 n−1
log2 |f 0 (xi )|.
n→∞ n
i=0
h∆Ii = − lı́m
(41)
Ahora, apliquemos la regla de la cadena:
¯
¯
¯
d 2 ¯¯
d
f (x)¯ =
f [f (x)]¯¯ = f 0 [f (x0 )]f 0 (x0 ) = f 0 (x1 )f 0 (x0 ),
dx
dx
x0
x0
donde x1 ≡ f (x0 ),
(42)
con lo cual escribimos la expresión (36) como:
¯
Λ(x0 ) =
¯
¯ d n
¯
1
log ¯¯
f (x0 )¯¯
n→∞ n
dx0
lı́m
¯
(43)
¯
¯n−1
¯
1
¯Y 0
¯
= lı́m log ¯
f (xi )¯
n→∞ n
¯
¯
i=0
(44)
X
1 n−1
log |f 0 (xi )|.
n→∞ n
i=0
(45)
=
lı́m
De esta manera, podemos escribir el exponente de Lyapunov como
λ(x0 ) = log 2 h∆Ii.
4.2.
(46)
Medida invariante
En general hemos descripto los atractores, sean estos puntos fijos, ciclos lı́mite, o atractores caóticos, como conjuntos de puntos. En el caso de los atractores caóticos, necesariamente,
debemos olvidarnos de seguirle el rastro a los puntos individuales, cosa que se puede hacer en
los otros casos. La solución a esta dificultad la provee el concepto de medida, que se encarga de
23
rastrear regiones del espacio de fases en lugar de puntos. La medida nos dice cuánto del atractor
se encuentra en cada región del espacio de fases.
Por ejemplo, supongamos que dividimos el espacio de fases plano en el que yace un atractor
extraño en cuatro regiones. Tomamos un punto (en cualquier región) como condición inicial y
seguimos su trayectoria. En cada iteración, vamos contando si la órbita pasa por cada región o no.
Después de un tiempo largo (estrictamente, después de un tiempo infinito) dividimos las veces
que la órbita pasó por cada caja por el número total de iteraciones, y tenemos cuatro números
que nos dicen qué fracción del tiempo la órbita estuvo en cada caja. Estos números puede
considerarse como la probabilidad de que un punto del atractor esté en cada caja. Claramente,
estos números son positivos o nulos, y si reunimos varias cajas en una sola caja más grande, sus
probabilidades se suman. Estas propiedades definen a una medida. Existen sutilezas matemáticas
difı́ciles de imaginar, que escapan al presente contenido. Pero algunas propiedades interesantes
son fáciles. La medida del espacio de fases es 1. Algunas medidas son invariantes: la medida de
las preimágenes de un conjunto de puntos puede ser igual a la medida del conjunto de puntos.
Si en lugar del atractor extraño ponemos en el espacio la trayectoria de un proceso aleatorio
uniforme, la medida que se genera se llama medida de Lebesgue. Si casi cualquier condición
inicial produce la misma medida, esa medida se llama medida natural.
4.3.
Atractores caóticos
El último concepto del que vamos a ocuparnos, y que ya conocemos de manera informal,
es el de atractor caótico. Sabemos que hay órbitas caóticas, que podemos caracterizarlas con
exponentes de Lyapunov positivo, etcétera. Pero, ¿puede el movimiento caótico ser atrayente?
Es decir, a pesar de ser tan inestable desde un punto de vista local (divergencia exponencial de
las órbitas), ¿puede ser estable globalmente, y atraer una parte substancial de las condiciones
iniciales?
La respuesta, claro está, es positiva. Los atractores caóticos existen. Sus propiedades más
importantes son:
1. Un atractor caótico contiene una órbita caótica.
2. Un atractor caótico atrae un conjunto de condiciones iniciales de medida no nula (si bien
esta cuenca puede ser muy intrincada).
Además, un atractor caótico debe ser un ω-lı́mite. Esto permite descartar todo comportamiento transitorio al partir de condiciones iniciales que no estén sobre el atractor. En suma,
tenemos las:
Definiciones. Sea {f n (x0 )} una órbita caótica. Si x0 ∈ ω(x0 ), entonces ω(x0 ) se llama un
conjunto caótico. En otras palabras, un conjunto caótico es el ω-lı́mite de una órbita caótica
que está contenida en su propio ω-lı́mite. Un atractor es un ω-lı́mite que atrae un conjunto de
condiciones iniciales cuya medida en el espacio de fases es no nula, y que constituye la cuenca
del atractor. (Esta definición no es privativa del caos, desde luego.) Finalmente, un atractor
caótico es un conjunto caótico que es también un atractor.
Vale la pena mencionar, para que no parezca que hay redundancia en las definiciones, que
no todo conjunto caótico es atractor caótico8 .
Este es un buen lugar para una aclaración que todos Uds. deben estar esperando, en algún
lugar recóndito de su cerebro: es extremadamente difı́cil probar rigurosamente que una determinada órbita es caótica, aún para sistemas sencillos. Aún cuando el mejor cálculo computacional
nos dé un exponente de Lyapunov positivo, se trata siempre de una aproximación. Nada garantiza que un cálculo más largo nos siga dando positivo. Y si el perı́odo de una eventual órbita
periódica es mayor que el número de átomos en el universo, que si bien es un número grande
está muy lejos de ser infinito, entonces ningún cálculo computacional podrá detectarlo.
8
Ejercicio: Demostrar que el mapeo logı́stico para r > 4 tiene un conjunto caótico, que no es atractor.
24
Ejercicios: Dibujar el atractor caótico y su cuenca de atracción para los siguientes mapeos
famosos:
1. El mapeo de Hénon: f (x, y) = (a − x2 + by, x), con a = 1,4 y b = 0,3.
2. El mapeo de Ikeda: f (x, y) = (r + c2 (x cos τ − y sin τ ), c2 (x sin τ + y cos τ )), donde τ =
c1 − c3 /(1 + x2 + y 2 ), con r = 0,9, c1 = 0,4, c2 = 0,9 y c3 = 6. (Este mapeo es un modelo
del tipo de componente que usarán las computadoras ópticas, cuando existan.)
3. El mapeo de Poincaré de tiempo 2π de un péndulo forzado y amortiguado: ẍ = −cẋ −
sin x + ρ sin t, con c = 0,05, ρ = 2,5. Este sistema tiene también puntos fijos y órbitas
periódicas (inestables, eso sı́). Puede ser instructivo dibujarlos, y también las variedades
estable e inestable de alguno de ellos, y comparar con el atractor caótico.
25
Cuadro 2: Resumen de las tres principales rutas al caos.
Feigenbaum
Pommeau-Manneville
Ruelle-Takens-Newhouse
Bifurcación pitchfork
Bifurcación tangente
Bifurcación de Hopf
Diagramas de bifurcación
Principales fenómenos
Cascada infinita de
bifurcaciones de perı́odo
con propiedades de escaleo
universales.
Experimentos
Experimento de Bénard
Experimento de Taylor
Oscilaciones no lineales forzadas
Reacciones quı́micas
Inestabilidades ópticas
5.
Transición intermitente
al caos. La fase laminar
tiene una duración
(r − rc )−1/2 .
Después de tres
bifurcaciones, un atractor
extraño es “probable.”
Experimento de Bénard
Junturas Josephson
Reacciones quı́micas
Lásers
Experimento de Bénard
Experimento de Taylor
Conductores no lineales
Rutas al caos
La cascada de bifurcaciones de Feigenbaum no es la única “ruta al caos.” Hemos visto que
en el sistema de Lorenz, el caos surge de una manera distinta. Sin embargo, se han identificad
unas pocas “rutas al caos” tanto numéricamente como en experimentos reales, que definen tanta
“clases de universalidad,” que comprenden sistemas a veces muy distintos, pero que comparte
caracterı́sticas generales en la manera en que surge el caos al variar los parámetros. Nada indic
que la totalidad de las rutas al caos se agote en las conocidas, por supuesto. En la tabla se lista
las tres más relevantes.
La cascada de bifurcaciones de la ruta de Feigenbaum no está limitada al mapeo logı́stic
y sus parientes. Un gran número de sistemas continuos presenta el mismo tipo de leyes de escale
universales en un esquema de cascada de bifurcaciones de perı́odo. El sistema de Rossler es e
ejemplo más sencillo, y es probablemente el sistema continuo más sencillo que presenta caos:
ẋ = −y − z,
(47
ẏ = x + ay,
(48
ż = b + (x − c)z.
(49
Este sistema tiene una sola no-linealidad, y le faltan las simetrı́as que tiene el sistema de Lorenz
Para a = b = 0,1, y usando c como parámetro de control con valores entre 4 y 18, puede vers
cómo una órbita simple sufre una cascada de bifurcaciones de perı́odo que se acumulan en un
esencialmente, consiste en una órbita que parece regular durante un tiempo más o menos largo,
y que súbitamente es interrumpida por un lapso de comportamiento caótico. La interpretación
de este fenómeno se basa en la observación de que ocurre una bifurcación tangente. De éstas hay
tres tipos, pero basta ejemplificar uno de ellos. En la intermitencia de tipo I, un autovalor real
cruza el cı́rculo unidad en 1 y pierde su estabilidad. Por ejemplo, el sistema
xn+1 = f (xn ) = ² + xn + x2n .
(50)
En un diagrama cobweb, podemos ver fácilmente que f , que es una parábola, cruza la identidad
dos veces si ² < 0. Cuando ² se hace 0, la parábola se hace tangente a la identidad (coalescencia de los dos puntos fijos), y para valores ² > 0 no hay intersección: ya no hay equilibrios.
Aquı́ no hubo cascada ni nada parecido, todos los equilibrios desaparecen de golpe en una sola
bifurcación. Sin embargo, para valores pequeños y positivos de ², la parábola está cerca de la
identidad. El diagrama cobweb nos muestra cómo una trayectoria que intente pasar por donde
estuvo el punto fijo pasará mucho tiempo rebotando entre la parábola y la identidad. O sea, la
trayectoria pasará mucho tiempo cerca del punto fijo, aunque éste ya no exista. Una vez del otro
lado, el movimiento se vuelve caótico hasta que se produce una reinyección a la vecindad del
fantasma del equilibrio y la historia se repite. Este mecanismo da lugar al los largos perı́odos
laminares observados por Pommeau y Manneville. La duración de las regiones laminares resulta
comportarse, en promedio, como hT i ∼ ²−1/2 .
Otro sistema que muestra este comportamiento es el mapeo logı́stico, cuando el caos desaparece en un perı́odo-3 mediante una bifurcación tangente que ocurre en tres lugares a la vez.
Después, para valores mayores de r, el perı́odo-3 vuelve a dar lugar a caos mediante una cascada
de bifurcaciones pitchfork.
La ruta de Ruelle-Takens-Newhouse, esencialmente, consiste en un movimiento cuasiperiódico que resulta desestabilizado por una perturbación periódica no lineal. Provee una ruta
a la turbulencia mucho más sencilla que la propuesta por Landau, y sustentada además experimentalmente. A medida que aumenta el parámetro de control, aparece primero una frecuencia
fundamental, y luego una segunda, y luego el espectro se vuelve continuo (experimentos de
Bénard y de Taylor). En el modelo de Landau, se requiere la aparición de infinitas frecuencias
fundamentales, una especie de cascada de bifurcaciones de Hopf (cada bifurcación de Hopf introduce una nueva frecuencia en el sistema), antes de obtener el comportamiento caótico (la
turbulencia en el tiempo). El espectro de potencia permanece siempre discreto, aproximándose
a un continuo sólo en el lı́mite de infinitas bifurcaciones.
Está claro que el Caos debe ocurrir por lo menos después de dos bifurcaciones de Hopf, ya
que dos bifurcaciones de Hopf producen movimiento sobre un toro bidimensional, y en 2D el
caos está prohibido por el teorema de Poincaré-Bendixson. El trabajo de RTN muestra que,
después de dos Hopf, el caos es “casi” inevitable. Dicho de otro modo: en un sistema con tres
frecuencias no conmensurables, el movimiento cuasiperiódico es inestable.
Es además el caso del caos en el mapeo de Anosov que vimos en un
√ ejercicio. El comportamiento es caótico cuando los autovectores contienen la razón dorada ( 5 − 1)/2, cuasiperiódico
cuando son simplemente irracionales.
27
Referencias
[1] K. T. Alligood, T. D. Sauer y J. A. Yorke, Chaos, An introduction to dynamical systems
(Springer, New York, 1997).
[2] P. G. Drazin, Nonlinear Systems (Cambridge University Press, New York, 1992).
[3] M. Feigenbaum, Quantitative universality for a class of nonlinear transformations, J. Stat.
Phys. 19, 25-52 (1978).
[4] J. Gleick, Chaos, Making a new science (Abacus, London, 1987). Este libro es una introducción a nivel divulgativo, escrita en pleno auge del estudio del caos determinista. Es
especialmente interesante para enterarse sobre la historia de la disciplina en sus primeros
años.
[5] E. N. Lorenz, Deterministic nonperiodic flow, J. Atmos. Sci. 20, 130-141 (1963).
[6] R. May, Nature (1976).
[7] G. Nicolis, Introduction to Nonlinear Science (Cambridge University Press, New York,
1995).
[8] H. G. Schuster, Deterministic Chaos (1984).
[9] H. G. Solari, M. A. Natiello y G. B. Mindlin, Nonlinear Dynamics, A two way trip from
Physics to Math (Institute of Physics, London, 1996).
[10] R. V. Solé y S. C. Manrubia, Orden y caos en sistemas complejos (Edicions de la Universitat
Politècnica de Catalunya, Barcelona, 1996).
28
![[Vídeo] Debate con Alejandro Cao de Benós, representante de Corea Democrática](http://s2.studylib.es/store/data/003771786_1-18b18c4ba88dd0098251d44505455bd3-300x300.png)