Fuerza Descomposición de las fuerzas que actúan sobre un sólido
Anuncio

Fuerza
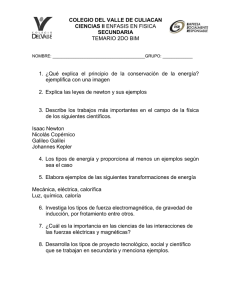
Descomposición de las fuerzas que actúan sobre un sólido situado en un plano inclinado.
En física, la fuerza es una magnitud física que mide la intensidad del intercambio de momento lineal entre dos
partículas o sistemas de partículas (en lenguaje de la física de partículas se habla de interacción). Según una
definición clásica, fuerza es todo agente capaz de modificar la cantidad de movimiento o la forma de los
cuerpos materiales. No debe confundirse con los conceptos de esfuerzo o de energía.
En el Sistema Internacional de Unidades, la fuerza se mide en newtons (N).
Introducción
La fuerza es una modelización matemática de intensidad de las interacciones, junto con la energía. Así por
ejemplo la fuerza gravitacional es la atracción entre los cuerpos que tienen masa, el peso es la atracción que la
tierra ejerce sobre los objetos en las cercanías de su superficie, la fuerza elástica es el empuje o tirantez que
ejerce un resorte comprimido o estirado respectivamente, etc. En física hay dos tipos de ecuaciones de fuerza:
las ecuaciones "causales" donde se especifica el origen de la atracción o repulsión: por ejemplo la ley de la
gravitación universal de Newton o la ley de Coulomb y las ecuaciones de los efectos (la cual es
fundamentalmente la segunda ley de Newton).
La fuerza es una magnitud física de carácter vectorial capaz de deformar los cuerpos (efecto estático), modificar
su velocidad o vencer su inercia y ponerlos en movimiento si estaban inmóviles (efecto dinámico). En este
sentido la fuerza puede definirse como toda acción o influencia capaz de modificar el estado de movimiento o
de reposo de un cuerpo (imprimiéndole una aceleración que modifica el módulo o la dirección de su velocidad)
o bien de deformarlo.
Comúnmente nos referimos a la fuerza aplicada sobre un objeto sin tener en cuenta al otro objeto u objetos con
los que está interactuando y que experimentarán, a su vez, otras fuerzas. Actualmente, cabe definir la fuerza
como un ente físico-matemático, de carácter vectorial, asociado con la interacción del cuerpo con otros cuerpos
que constituyen su entorno.
El término fuerza se utiliza comúnmente para referirse a lo que mueve un objeto; por ejemplo la fuerza
necesaria para cargar un avión.
Historia
Busto de Arquímedes.
El concepto de fuerza fue descrito originalmente por Arquímedes, si bien únicamente en términos estáticos.
Arquímedes y otros creyeron que el "estado natural" de los objetos materiales en la esfera terrestre era el reposo
y que los cuerpos tendían, por sí mismos, hacia ese estado si no se actuaba sobre ellos en modo alguno. De
acuerdo con Aristóteles la perseverancia del movimiento requería siempre una causa eficiente (algo que parece
concordar con la experiencia cotidiana, donde las fuerzas de fricción pueden pasar desapercibidas).
Galileo Galilei (1564 - 1642) sería el primero en dar una definición dinámica de fuerza, opuesta a la de
Arquímedes, estableciendo claramente la ley de la inercia, afirmando que un cuerpo sobre el que no actúa
ninguna fuerza permanece en movimiento inalterado. Esta ley, que refuta la tesis de Arquímedes, aún hoy día no
resulta obvia para la mayoría de las personas sin formación científica
Se considera que fue Isaac Newton el primero que formuló matemáticamente la moderna definición de fuerza,
aunque también usó el término latino vis ('fuerza') para otros conceptos diferentes. Además, Isaac Newton
postuló que las fuerzas gravitatorias variaban según la ley de la inversa del cuadrado de la distancia.
Charles Coulomb fue el primero que comprobó que la interacción entre cargas eléctricas o electrónicas
puntuales también varía según la ley de la inversa del cuadrado de la distancia (1784).
En 1798, Henry Cavendish logró medir experimentalmente la fuerza de atracción gravitatoria entre dos masas
pequeñas utilizando una balanza de torsión. Gracias a lo cual pudo determinar el valor de la constante de la
gravitación universal y, por tanto, pudo calcular la masa de la Tierra.
Con el desarrollo de la electrodinámica cuántica, a mediados del siglo XX, se constató que la "fuerza" era una
magnitud puramente macroscópica surgida de la conservación del momento lineal o cantidad de movimiento
para partículas elementales. Por esa razón las llamadas fuerzas fundamentales suelen denominarse
"interacciones fundamentales".
Fuerza en mecánica newtoniana
La fuerza se puede definir a partir de la derivada temporal del momento lineal:
Si la masa permanece constante, se puede escribir:
que es la expresión tradicional de la segunda ley de Newton.
En el caso de la estática, donde no existen aceleraciones, las fuerzas actuantes pueden deducirse de
consideraciones de equilibrio.
Fuerza gravitatoria
Fuerzas gravitatorias entre dos partículas.
En mecánica newtoniana la fuerza de atracción entre dos masas, cuyos centros de gravedad están lejos
comparadas con las dimensiones del cuerpo,1 viene dada por la ley de la gravitación universal de Newton:
Donde:
es la fuerza que actúa sobre el cuerpo 2, ejercida por el cuerpo 1.
constante de la gravitación universal.
vector de posición relativo del cuerpo 2 respecto al cuerpo 1.
es el vector unitario dirigido desde 1 hacía 2.
masas de los cuerpos 1 y 2.
Cuando la masa de uno de los cuerpos es muy grande en comparación con la del otro (por ejemplo, si tiene
dimensiones planetarias), la expresión anterior se transforma en otra más simple:
Donde:
es la fuerza del cuerpo de gran masa ("planeta") sobre el cuerpo pequeño.
es un vector unitario dirigido desde el centro del "planeta" al cuerpo de pequeña masa.
es la distancia entre el centro del "planeta" y el del cuerpo pequeño..
Fuerzas internas y de contacto
FN representa la fuerza normal ejercida por el plano inclinado sobre el objeto situado sobre él.
En los sólidos, el principio de exclusión de Pauli conduce junto con la conservación de la energía a que los
átomos tengan sus electrones distribuidos en capas y tengan impenetrabilidad a pesar de estar vacíos en un 99%.
La impenetrabildad se deriva de que los átomos sean "extensos" por el principio de Pauli y que los electrones de
las capas exteriores ejerzan fuerzas electrostáticas de repulsión que hacen que la materia sea macroscópicamente
impenetrable. Lo anterior se traduce en que dos cuerpos puestos en "contacto" experimentarán superficialmente
fuerzas resultantes normales (o aproximadamente normales) a la superficie que impedirán el solapamiento de las
nubes electrónicas de ambos cuerpos.
Las fuerzas internas son similares a las fuerzas de contacto entre ambos cuerpos y si bien tienen una forma más
complicada, ya que no existe una superficie macroscópica a través de la cual se den la superficie. La
complicación se traduce por ejemplo en que las fuerzas internas necesitan ser modelizadas mediante un tensor
de tensiones en que la fuerza por unidad de superficie que experimenta un punto del interior depende de la
dirección a lo largo de la cual se consideren las fuerzas.
Lo anterior se refiere a sólidos, en los fluidos en reposo las fuerzas internas dependen esencialmente de la
presión, y en los fluidos en movimiento también la viscosidad puede desempeñar un papel importante.
Fricción
Artículo principal: Fricción
La fricción puede darse entre las superficies libres de sólidos, en el tratamiento de los problemas mediante
mecánica newtoniana la fricción entre sólidos frecuentemente se modeliza como una fuerza sobre el plano
tangente del contacto entre sólidos, de valor proporcional a la fuerza normal.
El rozamiento entre sólido líquido y en el interior de un líquido o un gas depende esencialmente de si el flujo se
considera laminar o turbulento, de la ecuación constitutiva
Si la fuerza de rozamiento Fr es proporcional a la normal N, y a la constante de proporcionalidad se la llama
:
Y permaneciendo la fuerza normal constante, se puede calcular dos coeficientes de rozamiento: el estático y el
dinámico como:
donde el coeficiente de rozamiento estático
corresponde al de la mayor fuerza que el cuerpo puede
soportar inmediatamente antes de iniciar el movimiento y el coeficiente de rozamiento dinámico
corresponde a la fuerza necesaria para mantener el cuerpo en movimiento una vez iniciado.
Dinamómetro
Dinamómetro.
Principio de funcionamiento de un
dinamómetro.
Se denomina dinamómetro a un instrumento utilizado para medir fuerzas. El dinamómetro tradicional,
inventado por Isaac Newton, basa su funcionamiento en la elongación de un resorte que sigue la ley de Hooke
en el rango de medición. Al igual que una báscula con muelle elástico, es una balanza de resorte, pero no debe
confundirse con una balanza de platillos (instrumento utilizado para comparar masas).
Estos instrumentos constan de un muelle, generalmente contenido en un cilindro que a su vez puede estar
introducido en otro cilindro. El dispositivo tiene dos ganchos o anillas, uno en cada extremo. Los dinamómetros
llevan marcada una escala, en unidades de fuerza, en el cilindro hueco que rodea el muelle. Al colgar pesos o
ejercer una fuerza sobre el gancho exterior, el cursor de ese extremo se mueve sobre la escala exterior,
indicando el valor de la fuerza.
Si la fuerza ejercida sobre el muelle es tal que se excede el límite elástico del mismo, entonces el resorte se
deforma plásticamente, es decir, adquiere una deformación permanente, lo que conlleva a la inutilización del
instrumento. Para evitar esto, muchos dinamómetros disponen de topes que evitan que el muelle de deforme más
allá del límite elástico.
Una forma común de dinamómetro es una balanza de resorte calibrada en newtons, la unidad de fuerza del
Sistema Internacional de unidades (SI).
Aplicaciones
Existen dinamómetros diseñados para diversas aplicaciones. Una de ellas es la de pesar, es decir, para medir el
peso de algo y por equivalencia determinar su masa. Esto conlleva a la necesidad de calibración el instrumento
cada vez que se cambia de ubicación, especialmente en medidas de precisión, debido a la variación de la
relación entre la masa y el peso, que es la aceleración de la gravedad y depende del emplazamiento.
donde
P es el peso, cuya unidad básica en el Sistema Internacional es el newton;
m es la masa, cuya unidad básica es el kilogramo;
g es la aceleración de la gravedad, cuya unidad básica es el m/s².
Algunas máquinas de ensayo de materiales someten las probetas a esfuerzos que pueden ser medidos con
dinamómetros u otros instrumentos de medición de fuerzas, como una célula de carga. Además miden otras
magnitudes como la deformación de la probeta en un ensayo de tracción, la penetración en un ensayo de dureza
o el número de ciclos en un ensayo de fatiga.
También se usan en ortodoncia para medir las fuerzas aplicadas durante el tratamiento.
Leyes de Newton
La primera y segunda ley de Newton, en latín, en la edición original de su obra Principia Mathematica.
Las Leyes de Newton, también conocidas como Leyes del movimiento de Newton,1 son tres principios a partir
de los cuales se explican la mayor parte de los problemas planteados por la dinámica, en particular aquellos
relativos al movimiento de los cuerpos. Revolucionaron los conceptos básicos de la física y el movimiento de
los cuerpos en el universo, en tanto que
constituyen los cimientos no sólo de la dinámica clásica sino también de la física clásica en general. Aunque
incluyen ciertas definiciones y en cierto sentido pueden verse como axiomas, Newton afirmó que estaban
basadas en observaciones y experimentos cuantitativos; ciertamente no pueden derivarse a partir de otras
relaciones más básicas. La demostración de su validez radica en sus predicciones... La validez de esas
predicciones fue verificada en todos y cada uno de los casos durante más de dos siglos.2
En concreto, la relevancia de estas leyes radica en dos aspectos:
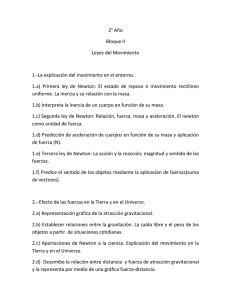
Por un lado, constituyen, junto con la transformación de Galileo, la base de la mecánica clásica;
Por otro, al combinar estas leyes con la Ley de la gravitación universal, se pueden deducir y explicar las
Leyes de Kepler sobre el movimiento planetario.
Así, las Leyes de Newton permiten explicar tanto el movimiento de los astros, como los movimientos de los
proyectiles artificiales creados por el ser humano, así como toda la mecánica de funcionamiento de las
máquinas.
Su formulación matemática fue publicada por Isaac Newton en 1687 en su obra Philosophiae Naturalis
Principia Mathematica.3
No obstante, la dinámica de Newton, también llamada dinámica clásica, sólo se cumple en los sistemas de
referencia inerciales; es decir, sólo es aplicable a cuerpos cuya velocidad dista considerablemente de la
velocidad de la luz (que no se acerquen a los 300,000 km/s); la razón estriba en que cuanto más cerca esté un
cuerpo de alcanzar esa velocidad (lo que ocurriría en los sistemas de referencia no-inerciales), más posibilidades
hay de que incidan sobre el mismo una serie de fenómenos denominados efectos relativistas o fuerzas ficticias,
que añaden términos suplementarios capaces de explicar el movimiento de un sistema cerrado de partículas
clásicas que interactúan entre sí. El estudio de estos efectos (aumento de la masa y contracción de la longitud,
fundamentalmente) corresponde a la teoría de la relatividad especial, enunciada por Albert Einstein en 1905.
Fundamentos teóricos de las leyes
Leyes representadas en el salto de una rana.
La base teórica que permitió a Newton establecer sus leyes está también precisada en sus Philosophiae naturalis
principia mathematica.
El primer concepto que maneja es el de masa, que identifica con "cantidad de materia". La importancia de esta
precisión está en que permite prescindir de toda cualidad que no sea física-matemática a la hora de tratar la
dinámica de los cuerpos. Con todo, utiliza la idea de éter para poder mecanizar todo aquello no reducible a su
concepto de masa.
Newton asume a continuación que la cantidad de movimiento es el resultado del producto de la masa por la
velocidad, y define dos tipos de fuerzas: la vis insita, que es proporcional a la masa y que refleja la inercia de la
materia, y la vis impressa (momento de fuerza), que es la acción que cambia el estado de un cuerpo, sea cual sea
ese estado; la vis impressa, además de producirse por choque o presión, puede deberse a la vis centripeta (fuerza
centrípeta), una fuerza que lleva al cuerpo hacia algún punto determinado. A diferencia de las otras causas, que
son acciones de contacto, la vis centripeta es una acción a distancia. En esta distingue Newton tres tipos de
cantidades de fuerza: una absoluta, otra aceleradora y, finalmente, la motora, que es la que interviene en la ley
fundamental del movimiento.
En tercer lugar, precisa la importancia de distinguir entre lo absoluto y relativo siempre que se hable de tiempo,
espacio, lugar o movimiento.
En este sentido, Newton, que entiende el movimiento como una traslación de un cuerpo de un lugar a otro, para
llegar al movimiento absoluto y verdadero de un cuerpo
compone el movimiento (relativo) de ese cuerpo en el lugar (relativo) en que se lo considera, con el movimiento
(relativo) del lugar mismo en otro lugar en el que esté situado, y así sucesivamente, paso a paso, hasta llegar a
un lugar inmóvil, es decir, al sistema de referencias de los movimientos absolutos.4
De acuerdo con esto, Newton establece que los movimientos aparentes son las diferencias de los movimientos
verdaderos y que las fuerzas son causas y efectos de estos. Consecuentemente, la fuerza en Newton tiene un
carácter absoluto, no relativo.
Las leyes
Primera ley de Newton o Ley de la inercia
La primera ley del movimiento rebate la idea aristotélica de que un cuerpo sólo puede mantenerse en
movimiento si se le aplica una fuerza. Newton expone que:
Todo cuerpo persevera en su estado de reposo o movimiento uniforme y rectilíneo a no ser que sea obligado a
cambiar su estado por fuerzas impresas sobre él.5
Esta ley postula, por tanto, que un cuerpo no puede cambiar por sí solo su estado inicial, ya sea en reposo o en
movimiento rectilíneo uniforme, a menos que se aplique una fuerza o una serie de fuerzas cuyo resultante no sea
nulo sobre él. Newton toma en cuenta, así, el que los cuerpos en movimiento están sometidos constantemente a
fuerzas de roce o fricción, que los frena de forma progresiva, algo novedoso respecto de concepciones anteriores
que entendían que el movimiento o la detención de un cuerpo se debía exclusivamente a si se ejercía sobre ellos
una fuerza, pero nunca entendiendo como esta a la fricción.
En consecuencia, un cuerpo con movimiento rectilíneo uniforme implica que no existe ninguna fuerza externa
neta o, dicho de otra forma, un objeto en movimiento no se detiene de forma natural si no se aplica una fuerza
sobre él. En el caso de los cuerpos en reposo, se entiende que su velocidad es cero, por lo que si esta cambia es
porque sobre ese cuerpo se ha ejercido una fuerza neta.
Segunda ley de Newton o Ley de fuerza
La segunda ley del movimiento de Newton dice que
el cambio de movimiento es proporcional a la fuerza motriz impresa y ocurre según la línea recta a lo largo de la
cual aquella fuerza se imprime.6
Esta ley explica qué ocurre si sobre un cuerpo en movimiento (cuya masa no tiene por qué ser constante) actúa
una fuerza neta: la fuerza modificará el estado de movimiento, cambiando la velocidad en módulo o dirección.
En concreto, los cambios experimentados en la cantidad de movimiento de un cuerpo son proporcionales a la
fuerza motriz y se desarrollan en la dirección de esta; esto es, las fuerzas son causas que producen aceleraciones
en los cuerpos. Consecuentemente, hay relación entre la causa y el efecto, esto es, la fuerza y la aceleración
están relacionadas. Dicho sintéticamente, la fuerza se define simplemente en función del momento en que se
aplica a un objeto, con lo que dos fuerzas serán iguales si causan la misma tasa de cambio en el momento del
objeto.
En términos matemáticos esta ley se expresa mediante la relación:
Donde es la cantidad de movimiento y
la fuerza total. Si suponemos la masa constante y nos manejamos
con velocidades que no superen el 10% de la velocidad de la luz podemos reescribir la ecuación anterior
siguiendo los siguientes pasos:
Sabemos que
velocidad.
es la cantidad de movimiento, que se puede escribir m.V donde m es la masa del cuerpo y V su
Consideramos a la masa constante y podemos escribir
anterior:
aplicando estas modificaciones a la ecuación
que es la ecuación fundamental de la dinámica, donde la constante de proporcionalidad, distinta para cada
cuerpo, es su masa de inercia. Veamos lo siguiente, si despejamos m de la ecuación anterior obtenemos que m
es la relación que existe entre
y . Es decir la relación que hay entre la fuerza aplicada al cuerpo y la
aceleración obtenida. Cuando un cuerpo tiene una gran resistencia a cambiar su aceleración (una gran masa) se
dice que tiene mucha inercia. Es por esta razón por la que la masa se define como una medida de la inercia del
cuerpo.
Por tanto, si la fuerza resultante que actúa sobre una partícula no es cero, esta partícula tendrá una aceleración
proporcional a la magnitud de la resultante y en dirección de ésta. La expresión anterior así establecida es válida
tanto para la mecánica clásica como para la mecánica relativista, a pesar de que la definición de momento lineal
es diferente en las dos teorías: mientras que la dinámica clásica afirma que la masa de un cuerpo es siempre la
misma, con independencia de la velocidad con la que se mueve, la mecánica relativista establece que la masa de
un cuerpo aumenta al crecer la velocidad con la que se mueve dicho cuerpo.
De la ecuación fundamental se deriva también la definición de la unidad de fuerza o newton (N). Si la masa y la
aceleración valen 1, la fuerza también valdrá 1; así, pues, el newton es la fuerza que aplicada a una masa de un
kilogramo le produce una aceleración de 1 m/s². Se entiende que la aceleración y la fuerza han de tener la misma
dirección y sentido.
La importancia de esa ecuación estriba sobre todo en que resuelve el problema de la dinámica de determinar la
clase de fuerza que se necesita para producir los diferentes tipos de movimiento: rectilíneo uniforme (m.r.u),
circular uniforme (m.c.u) y uniformemente acelerado (m.r.u.a).
Si sobre el cuerpo actúan muchas fuerzas, habría que determinar primero el vector suma de todas esas fuerzas.
Por último, si se tratase de un objeto que cayese hacia la tierra con una resistencia del aire igual a cero, la fuerza
sería su peso, que provocaría una aceleración descendente igual a la de la gravedad.
Tercera Ley de Newton o Ley de acción y reacción
Con toda acción ocurre siempre una reacción igual y contraria: o sea, las acciones mutuas de dos cuerpos
siempre son iguales y dirigidas en sentido opuesto.6
La tercera ley es completamente original de Newton (pues las dos primeras ya habían sido propuestas de otras
maneras por Galileo, Hooke y Huygens) y hace de las leyes de la mecánica un conjunto lógico y completo. 7
Expone que por cada fuerza que actúa sobre un cuerpo, este realiza una fuerza de igual intensidad y dirección,
pero de sentido contrario sobre el cuerpo que la produjo. Dicho de otra forma, las fuerzas, situadas sobre la
misma recta, siempre se presentan en pares de igual magnitud y opuestas en sentido.
Este principio presupone que la interacción entre dos partículas se propaga instantáneamente en el espacio (lo
cual requeriría velocidad infinita), y en su formulación original no es válido para fuerzas electromagnéticas
puesto que estas no se propagan por el espacio de modo instantáneo sino que lo hacen a velocidad finita "c".
Es importante observar que este principio de acción y reacción relaciona dos fuerzas que no están aplicadas al
mismo cuerpo, produciendo en ellos aceleraciones diferentes, según sean sus masas. Por lo demás, cada una de
esas fuerzas obedece por separado a la segunda ley. Junto con las anteriores leyes, ésta permite enunciar los
principios de conservación del momento lineal y del momento angular.
Cantidad de movimiento
La cantidad de movimiento, momento lineal, ímpetu o moméntum es una magnitud vectorial, unidad SI: (kg
m/s) que, en mecánica clásica, se define como el producto de la masa del cuerpo y su velocidad en un instante
determinado. En cuanto al nombre, Galileo Galilei en su Discursos sobre dos nuevas ciencias usa el término
italiano impeto, mientras que Isaac Newton usa en Principia Mathematica el término latino motus1
(movimiento) y vis (fuerza). Moméntum es una palabra directamente tomada del latín mōmentum, derivado del
verbo mŏvēre 'mover'.
En Mecánica Clásica la forma más usual de introducir la cantidad de movimiento es mediante definición como
el producto de la masa (kg) de un cuerpo material por su velocidad (m/s), para luego analizar su relación con la
ley de Newton a través del teorema del impulso y la variación de la cantidad de movimiento. No obstante,
después del desarrollo de la Física Moderna, esta manera de hacerlo no resultó la más conveniente para abordar
esta magnitud fundamental.
El defecto principal es que esta forma esconde el concepto inherente a la magnitud, que resulta ser una
propiedad de cualquier ente físico con o sin masa, necesaria para describir las interacciones. Los modelos
actuales consideran que no sólo los cuerpos masivos poseen cantidad de movimiento, también resulta ser un
atributo de los campos y los fotones.
La cantidad de movimiento obedece a una ley de conservación, lo cual significa que la cantidad de movimiento
total de todo sistema cerrado (o sea uno que no es afectado por fuerzas exteriores, y cuyas fuerzas internas no
son disipadoras) no puede ser cambiada y permanece constante en el tiempo.
En el enfoque geométrico de la mecánica relativista la definición es algo diferente. Además, el concepto de
momento lineal puede definirse para entidades físicas como los fotones o los campos electromagnéticos, que
carecen de masa en reposo. No se debe confundir el concepto de momento lineal con otro concepto básico de la
mecánica newtoniana, denominado momento angular, que es una magnitud diferente.
Finalmente, se define el impulso recibido por una partícula o un cuerpo como la variación de la cantidad de
movimiento durante un período de tiempo dado:
siendo pf la cantidad de movimiento al final del intervalo y p0 al inicio del intervalo.
Cantidad de movimiento en mecánica clásica
Mecánica newtoniana
Históricamente el concepto de cantidad de movimiento surgió en el contexto de la mecánica newtoniana en
estrecha relación con el concepto de velocidad y el de masa. En mecánica newtoniana se define la cantidad de
movimiento lineal como el producto de la masa por la velocidad:
La idea intuitiva tras esta definición está en que la "cantidad de movimiento" dependía tanto de la masa como de
la velocidad: si se imagina una mosca y un camión, ambos moviéndose a 40 km/h, la experiencia cotidiana dice
que la mosca es fácil de detener con la mano mientras que el camión no, aunque los dos vayan a la misma
velocidad. Esta intuición llevó a definir una magnitud que fuera proporcional tanto a la masa del objeto móvil
como a su velocidad.
Tomado de: http://es.wikipedia.org/wiki/Fuerza