Tensiones de Contacto-Fatiga Superficial-R00
Anuncio

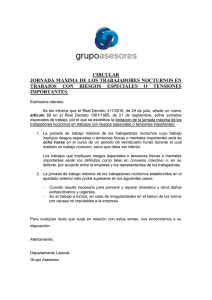
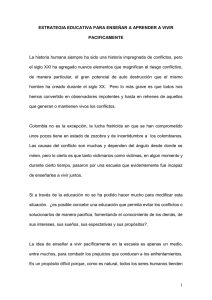
UNIVERSIDAD DE BUENOS AIRES - FACULTAD DE INGENIERÍA 67.12 MECANISMOS B - 2012 TENSIONES DE CONTACTO FATIGA SUPERFICIAL Autor: Ing. José María di Iorio =========================================================== 1 – Introducción En todas las estructuras y máquinas existen cuerpos sólidos en contacto, los cuales pueden tener movimiento relativo entre sí, o estar inmóviles, uno respecto del otro. La presión entre sólidos elásticos en contacto, en cualquiera de los dos casos anteriores, causa tensiones localizadas en un entorno de la superficie de contacto denominadas “Tensiones de Contacto”. Usualmente, las tensiones que en la mayoría de los elementos resistentes motivan la falla se presentan en zonas del cuerpo muy alejadas de la influencia de las tensiones de contacto. Sin embargo, en algunos casos, las tensiones de contacto son las más importantes y son las que determinan el modo de falla de uno o ambos cuerpos en contacto. Esta situación se presenta cuando los cuerpos en contacto están en movimiento relativo entre sí. Estos elementos de máquina o partes de elementos de máquina que trabajan en contacto entre sí, tienen movimiento relativo por rodadura, deslizamiento, o bien mediante una combinación de ambos tipos de movimiento. Tensiones de Contacto-Fatiga Superficial–R00 Página 1 de 14 Ejemplos: Elementos rodantes y aros en un rodamiento (rodadura idealmente) Rueda y riel (rodadura idealmente) Leva y seguidor (rodadura idealmente o deslizamiento, según sea el seguidor) Dientes de ruedas dentadas (rodadura y deslizamiento, según la zona del flanco del diente en que están haciendo contacto) Rodillos laminadores y material laminado (rodadura y deslizamiento) Cuando dos superficies ruedan, o bien ruedan y se deslizan una contra la otra, al cabo de un cierto tiempo, que dependerá de la intensidad de la fuerza de contacto, se producirá la falla en una o ambas superficies. El contacto entre dos sólidos elásticos con movimiento relativo repetido en el tiempo (por ejemplo, los elementos rodantes de un rodamiento que ruedan en contacto con los aros del mismo) genera tensiones de contacto que se repiten cíclicamente a lo largo del tiempo; estas tensiones son las causantes de la falla de uno o ambos sólidos. Este modo de falla se denomina “Fatiga Superficial”. Si bien no hay un acuerdo general respecto del mecanismo exacto de esta falla, se acepta que las tensiones tangenciales máximas debidas al contacto, las cuales se localizan un poco por debajo de la superficie, al cabo de un cierto número de ciclos de operación, son la causa de grietas que, con el tiempo, se van propagando hacia la superficie, produciendo el desprendimiento de partículas superficiales (“picado”). Una vez picada la superficie, su acabado superficial se deteriora y continúa el proceso de falla mediante el desprendimiento de grandes porciones superficiales de material (“descascarado”). El mecanismo de falla descripto es genérico, y puede modificarse según sean las condiciones de trabajo. La iniciación de la falla no necesariamente se origina por debajo de la superficie; puede producirse en la superficie si allí se encuentra una imperfección o discontinuidad. Otro factor que afecta al mecanismo de falla es la presencia o ausencia de lubricante. Cuando la grieta llega a la superficie, según sea su orientación y la viscosidad del lubricante, éste puede ingresar a la grieta a presión (debido al contacto entre las superficies), y producir el desprendimiento de material, lo cual concuerda con el mecanismo de falla descripto más arriba. En ensayos realizados operando en seco (sin lubricación), aún cuando se produjeron grietas superficiales, no ocurrieron picaduras. Las piezas con grietas superficiales continuaron operando durante una gran cantidad de ciclos, sin fallar. Tensiones de Contacto-Fatiga Superficial–R00 Página 2 de 14 No debe concluirse de esto que un modo viable para retrasar la falla por fatiga superficial consiste en no lubricar las superficies en contacto. Ello, además de la pérdida de energía que traería aparejada, promovería otros tipos de mecanismos de falla por desgaste. La recomendación es incrementar la viscosidad del lubricante, en la medida en que sea compatible con los requerimientos de la lubricación, para dificultar el ingreso del fluido en la grieta. Otras recomendaciones para retrasar la falla por fatiga superficial son aumentar la dureza en la superficie del material y mejorar su terminación superficial, reduciendo su rugosidad. El fenómeno de fatiga superficial es similar al fenómeno de fatiga debido a tensiones variables en todo el volumen del cuerpo, en tanto la falla se producirá, en ambos casos, al cabo de un tiempo que aumenta al disminuir la intensidad de las tensiones significativas en el fenómeno, pero difiere en un aspecto esencial: los aceros y otros materiales, sometidos a fatiga por tensiones variables en todo el volumen del cuerpo tienen un “Límite de Resistencia a la Fatiga”, el cual es un valor de tensión por debajo del cual el material no falla, independientemente de la cantidad de ciclos de operación. Por el contrario, ningún material muestra una propiedad equivalente cuando se lo somete a fatiga superficial. Por pequeñas que sean las tensiones presentes, siempre se producirá la falla por fatiga superficial, al cabo de un número suficiente de ciclos de operación. Esta es la razón por la cual, por ejemplo, los rodamientos, se seleccionan para una determinada cantidad de ciclos de vida, y no para vida infinita, ya que este concepto no es aplicable a elementos de máquina sometidos a fatiga superficial. Tensiones de Contacto-Fatiga Superficial–R00 Página 3 de 14 2 – Análisis de tensiones de contacto Los valores de las tensiones de contacto dependen de: 1- La geometría de los cuerpos en contacto (radios de curvatura máximo y mínimo de las superficies en el punto teórico de contacto). 2-Las constantes elásticas de los cuerpos en contacto (E: módulo de elasticidad longitudinal o módulo de Young y : módulo de Poisson). 3- La fuerza de contacto (F). 4- Las coordenadas del punto considerado, respecto de una terna con origen en el punto teórico de contacto. El caso general admite cualquier geometría tridimensional para cada cuerpo en contacto, y su resolución es extremadamente compleja. Sin embargo, hay dos casos particulares que son de interés práctico y de resolución más sencilla: Esfera sobre esfera Cilindro sobre cilindro El primer investigador que obtuvo resultados satisfactorios para estos casos fue Heinrich Hertz, en la segunda mitad del siglo XIX, por tal razón es que a veces se denomina a las tensiones de contacto “Tensiones de Hertz”. Los resultados que se presentarán a continuación corresponden al caso en que los elementos en contacto no tienen movimiento relativo entre sí, o se mueven con movimiento de rodadura pura. En muchos de los ejemplos mencionados al principio del apunte el movimiento es de rodadura pura o con deslizamiento no mayor al 1%, por lo cual las expresiones que se darán son aplicables a estos casos. No sucede así en los casos en que la componente de deslizamiento sea importante (por ejemplo, el contacto de dientes de ruedas dentadas o en el contacto entre rodillos laminadores y material laminado). En estos casos la componente de deslizamiento produce una distorsión del campo de tensiones. Las hipótesis generales efectuadas para la deducción de las expresiones que siguen son las siguientes: 1-Los cuerpos en contacto pueden ser de distintos materiales. 2-El material de cada uno de los cuerpos es homogéneo, isótropo y elástico lineal (responde a la ley de Hooke). Tensiones de Contacto-Fatiga Superficial–R00 Página 4 de 14 3-Antes de aplicar las cargas de compresión F, existe un plano tangente común a las superficies de ambos cuerpos en el punto de contacto. 4-Luego de aplicar las cargas de compresión F, se forma una pequeña superficie plana de contacto, entrando en contacto los puntos que estuvieron equidistantes del plano tangente común, siendo la frontera de la superficie de contacto una elipse (en el caso general). 2.1 – Contacto entre dos esferas macizas Superficie de contacto: La superficie de contacto es un círculo de radio a, siendo su expresión: Tensiones de Contacto-Fatiga Superficial–R00 Página 5 de 14 Presión en la superficie: La presión máxima en la superficie de contacto ocurre en su centro, y su expresión es: La presión media en la superficie es: Por tanto, la presión máxima en la superficie, en función de la presión media es: La distribución de presión es semielíptica a lo largo de los ejes X e Y: La huella de contacto elíptica corresponde a un caso general; cuando el contacto se produce entre esferas resulta a = b (huella de contacto circular). La distribución de presión en la superficie de contacto es semielipsoidal: Las expresiones anteriores también pueden aplicarse al caso de contacto entre una esfera y una superficie plana (d = ∞) y entre una esfera y una superficie esférica interna (d < 0). Tensiones normales (σ) a lo largo del eje Z: En un entorno de la superficie de contacto, a lo largo del eje Z las tensiones principales se encuentran en las direcciones X, Y y Z, siendo las tensiones normales mínimas (máximas en módulo, de compresión), las de dirección Z: Tensiones de Contacto-Fatiga Superficial–R00 Página 6 de 14 Estas tensiones normales son máximas (en módulo) en la superficie de contacto (Z = 0): Tensiones tangenciales máximas ( ) a lo largo del eje Z: Como a lo largo del eje Z es: Resulta: El valor máximo de las es: Y se localiza en la coordenada Z de valor: Tensiones de Contacto-Fatiga Superficial–R00 Página 7 de 14 Si los materiales en contacto son acero ( aproximadamente igual a 0,30), resultará: • La tensión tangencial máxima será, aproximadamente, 0,34 veces la presión máxima • La tensión tangencial máxima se ubicará, aproximadamente, a 0,63 veces el radio de la huella de contacto (a) por debajo de la superficie. Variación de σx, σy, σz y τmax a lo largo del eje Z (para Tensiones de Contacto-Fatiga Superficial–R00 = 0,30) Página 8 de 14 2.2 – Contacto entre dos cilindros macizos de longitud ℓ Superficie de contacto: La superficie de contacto es un rectángulo de longitud ℓ y semiancho b, siendo la expresión de b: b Presión máxima en la superficie: La presión máxima en la superficie de contacto ocurre en su centro, y su expresión es: La presión media en la superficie es: Tensiones de Contacto-Fatiga Superficial–R00 Página 9 de 14 Por tanto, la presión máxima en la superficie, en función de la presión media es: La distribución de presión es semielíptica a lo largo del eje X: La distribución de presión en la superficie de contacto es un prisma semielíptico: (En la expresión anterior y en la figura de la derecha debe interpretarse a = b, y L = ℓ) Las expresiones anteriores también pueden aplicarse al caso de contacto entre un cilindro y una superficie plana (d = ∞) y entre un cilindro y una superficie cilíndrica interna (d < 0). Tensiones normales (σ) a lo largo del eje Z: En un entorno de la superficie de contacto, a lo largo del eje Z las tensiones principales se encuentran en las direcciones X, Y y Z, siendo las tensiones normales mínimas (máximas en módulo, de compresión), las de dirección Z. En puntos del eje Z muy cercanos a la superficie (z < 0,436 b, aproximadamente): σx σy En puntos del eje Z más lejanos a la superficie (z > 0,436 b, aproximadamente) σy σx Tensiones de Contacto-Fatiga Superficial–R00 Página 10 de 14 Las expresiones de estas tensiones son las siguientes: Estas tensiones normales son máximas en la superficie de contacto (Z = 0): Tensión tangencial máxima sobre el eje Z: Para 0 ≤ z ≤ 0,436 b: Para z ≥ 0,436 b: Si los materiales en contacto son acero ( aproximadamente igual a 0,30), resultará: • La tensión tangencial máxima será, aproximadamente, 0,304 veces la presión máxima • La tensión tangencial máxima se ubicará, aproximadamente, a 0,786 veces la dimensión b por debajo de la superficie. Tensiones de Contacto-Fatiga Superficial–R00 Página 11 de 14 Variación de σx, σy, σz y τmax a lo largo del eje Z (para Tensiones de Contacto-Fatiga Superficial–R00 = 0,30) Página 12 de 14 3 – Aplicación al diseño – Caso de cilindros en contacto Buckingham y Talbourdet ensayaron superficies en contacto rodante, obteniendo para pares de materiales un valor denominado “Resistencia a la Fatiga de Contacto o Hertziana” (Sc), la cual es el valor de la presión máxima que produce falla en la superficie el cabo de 100 000 000 de ciclos de operación. Las ecuaciones de Hertz para cilindros en contacto, ya vistas, son: Considerando = 0,30, usando los radios de los cilindros, y pasando la raíz al primer miembro, la ecuación anterior queda (llamando w a la longitud del cilindro): Aplicando el concepto de Sc y la expresión de la presión máxima, para que no haya falla en 100 millones de ciclos deberá cumplirse: ≤ Reemplazando el valor de b en la expresión anterior queda: 2,857 Sc² ( 1/E1 + 1/E2 ) ≥ (F / w) (1/r1 + 1/r2) Siendo: K1 = 2,857 Sc² ( 1/E1 + 1/E2 ) el Factor de Carga y Esfuerzo de Buckingham, el cual depende de los dos materiales en contacto. Habiendo seleccionado los dos materiales, se conocen Sc, E1 y E2, y K1 se calcula con la expresión inmediata anterior. Conocido K1, la ecuación de diseño queda: K1 ≥ (F / w) (1/r1 + 1/r2) Tensiones de Contacto-Fatiga Superficial–R00 Página 13 de 14 Si se satisface la ecuación anterior no habrá falla por fatiga en la superficie en los primeros 100 millones de ciclos de operación. El valor de Sc para aceros puede obtenerse, en forma aproximada, de la expresión: Sc = 2,76 HB - 70 MPa En donde HB es el número de dureza Brinell. Si los dos materiales tienen distinto HB, se emplea el de menor valor. Bibliografía consultada: Diseño de Máquinas – 1ª. Ed. - Ed. Prentice-Hall – Autor: Norton Diseño en Ingeniería Mecánica - 5ª. Ed. – Ed. McGraw-Hill – Autores: Shigley-Mischke Curso Superior de Resistencia de Materiales - 2ª. Ed. – Ed. Nigar – Autores: Seely-Smith Tensiones de Contacto-Fatiga Superficial–R00 Página 14 de 14