Cap´ıtulo 3 Composición de movimientos
Anuncio

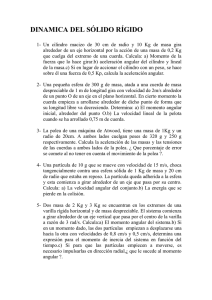
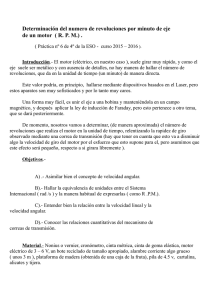
Capı́tulo 3 Composición de movimientos 3.1. Composición de movimientos Además de los problemas y ejercicios de este capı́tulo, es conveniente resolver los del anterior con las técnicas de composición de movimientos, y comparar las ventajas de uno u otro camino. Ejercicio 3.1.1: Un disco de radio r (sólido 2) rueda sin deslizar por el interior de una circunferencia fija de radio 2r y centro O (Sólido 1). El eje Ox0 del sistema intermedio 0 contiene en todo momento al centro del disco C. En un instante genérico, se pide: Velocidades angulares relativa y absoluta. Aceleración del punto de contacto I por composición de movimientos. Aceleración de I mediante el campo de aceleraciones del sólido 2. x0 I Razonar los pasos que habrı́a que dar para calcular la aceleración de I derivando su vector posición. Se trabajará en ejes 0, dejando los resultados en función de las derivadas del ángulo θ que forman Ox1 y Ox0 . C θ x1 O Ejercicio 3.1.2: Sea S1 un sistema de referencia con origen en el Sol y direcciones fijas en el espacio; el eje Sz1 es normal a la órbita de la Tierra. Sea S0 un sistema con origen en el Sol, eje Sz0 ≡ Sz1 , y el eje Sx0 pasa siempre por el centro de la Tierra. Finalmente, sea S2 un sistema de referencia unido a la Tierra, con origen en su centro. Se llama dı́a solar al periodo de rotación de la Tierra respecto al radio vector desde el Sol Sx0 . Se llama dı́a sidéreo a su periodo de rotación respecto a los ejes de direcciones fijas. z1 ≡ z0 Se supondrá, para simplificar, que el eje de rotación absoluta de la Tierra ω 21 (Eje de y0 polos) es paralelo a Sz1 . Se supondrá también que la órbita de la Tierra es circular y se ω 21 recorre con velocidad uniforme. Inicialmente coinciden S1 y S0 . Sabiendo que el periodo de la órbita (año) vale aproximadamente 365,25 y1 dı́as y que el dı́a solar dura 24 horas, calcular x1 x0 la duración del dı́a sidéreo. 9 10 CAPÍTULO 3. COMPOSICIÓN DE MOVIMIENTOS Ejercicio 3.1.3: Se repetirá el ejercicio anterior, pero teniendo en cuenta la inclinación del eje polar: la dirección de la velocidad angular absoluta de la Tierra ω 21 es paralela al plano Sx1 z1 y forma un ángulo θ = 23,45o con Sz1 , en la dirección negativa de Sx1 . Comparar la duración del dı́a sidéreo con la calculada antes. (El International Earth Rotation Service da un valor |ω21 | = 0,000072921 rad/s). z1 ≡ z0 y0 θ ω 21 y1 x1 x0 z1 Ejercicio 3.1.4: Un disco S2 de radio R rueda y pivota sin deslizar sobre un plano fijo Ox1 y1 manteniéndose siempre perpendicular a él. Sean (x, y) las coordenadas en ejes S1 de la proyección del centro del disco. Expresar en función de estas coordenadas, de los ángulos de Euler y de sus derivadas la condición cinemática de no deslizamiento. z0 ϕ ψ̇ C ϕ̇ x1 ψ y0 y1 I x0 z1 Ejercicio 3.1.5: Un disco S2 de radio R rueda y pivota sin deslizar sobre un plano fijo Ox1 y1 . Sean (x, y) las coordenadas en ejes S1 de la proyección del centro del disco. Expresar en función de estas coordenadas, de los ángulos de Euler y de sus derivadas la condición cinemática de no deslizamiento. z0 ϕ ψ̇ ϕ̇ θ C x1 ψ y0 y1 I θ̇ x0 Ejercicio 3.1.6: Una esfera de radio R (sólido S2 ) rueda y pivota sin deslizar sobre un plano fijo Ox1 y1 . Sean (x, y, R) las coordenadas de su centro en dichos ejes. Expresar la condición cinemática de no deslizamiento en función de las coordenadas, de los ángulos de Euler de la esfera, y de sus derivadas. Ejercicio 3.1.7: En la pelı́cula 2001: Una odisea del espacio, se presenta un sistema para crear gravedad artificial en una astronave. Se trata de un cilindro girando alrededor de su eje, y los astronautas viven en la superficie interior. La fuerza centrı́fuga proporciona una sensación de gravedad. Suponiendo un radio de 10m, calcular la velocidad angular del cilindro en rpm para obtener una gravedad de 0,1g. Sea un caso genérico con un cilindro de radio R girando con velocidad angular ω. Un astronauta corre por la superficie interior del cilindro con velocidad constante en el mismo sentido de la rotación. Calcular la gravedad que experimenta (se puede despreciar la altura del astronauta frente al radio del cilindro. Supóngase ahora que corre en sentido opuesto a la rotación. ¿A qué velocidad empezarı́a a flotar? Problema 3.1.1: La rueda de un ferrocarril de radio r se mueve rodando sin deslizar 3.1. COMPOSICIÓN DE MOVIMIENTOS 11 sobre un raı́l que traza una circunferencia de radio R en el plano horizontal. El plano que define la rueda es en todo momento tangente al raı́l y perpendicular al plano horizontal. Supongamos que el centro geométrico O de la rueda se mueve con una velocidad de módulo constante (v0 ). Consideremos un sistema de referencia S0 ligado al movimiento de la rueda: su origen está en el centro de la rueda, el eje Z0 es perpendicular a su superficie, Y0 es vertical y X0 es perpendicular a los dos anteriores. Utilizar coordenadas cartesianas referidas a estos ejes para responder a las siguientes preguntas: 1) Velocidad angular y aceleración angular de la rueda respecto al sistema de referencia S0 y respecto a otro fijo en la vı́a. (7 puntos) 2) Velocidad y aceleración del punto más alto de la rueda respecto al sistema de referencia S0 y respecto al fijo en la vı́a. (7 puntos) Z0 X0 r R O 3) Eje instantáneo de rotación y mı́nimo deslizamiento de la rueda, ası́ como su velocidad de mı́nimo deslizamiento. (6 puntos) Problema 3.1.2: Un proyectil cilı́ndrico gira con velocidad angular constante Ω alrededor de su eje. A su vez, el centro geométrico O del cilindro describe, respecto a un sistema de referencia absoluto S1 , una trayectoria plana que es tangente en todo momento al eje del cilindro. Definimos un sistema de referencia S0 asociado al movimiento YO del proyectil: está centrado en el punto O de forma que el eje Ω XO XO coincide con el eje de simetrı́a del cilindro. El eje YO está en Y 1 todo momento contenido en el plano del movimiento del centro O del cilindro, y es perpendicular a la trayectoria que describe el punto O. Finalmente ZO se define de forma que el sistema de ejes está orientado positivamente (a derechas). Estudiaremos O1 X1 dos casos: 1) El punto O describe una circunferencia de radio R con velocidad de módulo constante v0 . Expresar en el sistema de ejes SO : a) Velocidad y aceleración angular absolutas del proyectil (7/20). b) Eje instantáneo de rotación y mı́nimo deslizamiento. Velocidad de mı́nimo deslizamiento (6/20). 2) El punto O describe la trayectoria correspondiente a un tiro parabólico de ángulo 45◦ sobre la horizontal y velocidad inicial v0 , sometido a un valor arbitrario g de la aceleración de la gravedad. Expresar en el sistema de ejes SO : c) Velocidad angular absoluta del proyectil en el punto más alto de la trayectoria (7/20). Problema 3.1.3: Un disco de radio R gira sobre el plano horizontal con velocidad angular constante Ω alrededor de un eje vertical que pasa por su centro. Lo ejes dibujados en la figura pertenecen a un sistema de referencia S0 solidario al movimiento del disco. Sobre el disco hay dos barras, AB y CD, con las siguientes propiedades: 12 CAPÍTULO 3. COMPOSICIÓN DE MOVIMIENTOS Durante el movimiento del disco ambas barras permanecen en el plano Y0 Z0 . La barra AB tiene una longitud 2R y su extremo A está unido al borde del disco. La barra CD tiene una longitud R. Gira con velocidad angular constante 2 ω en el plano Y0 Z0 de forma que su extremo C permanece fijo en el centro del disco y el extremo D desliza a lo largo de la barra AB mediante una corredera. Z0 D 2ω θ A B Y0 C R X0 Se pide calcular: 1) Velocidad angular de la barra AB relativa al sistema de referencia S0 ligado al disco (4 puntos). 2) Eje instantáneo de rotación y mı́nimo deslizamiento de la barra AB respecto al sistema de referencia absoluto. Hallar la velocidad de deslizamiento (4 puntos). 3) Velocidad y aceleración del punto B relativas al sistema S0 . Velocidad y aceleración absolutas del punto B (2 puntos). Problema 3.1.4: Se quiere estudiar el movimiento de las hélices durante el despegue y transición a vuelo horizontal de la aeronave de rotores pivotantes Osprey. Para simplificar se supondrá que los rotores son sólidos rı́gidos, que giran con velocidad angular constante respecto a ejes ligados a la barquilla, ωr i0 el derecho y −ωr i0 el izquierdo. Inicialmente los motores están verticales (θ = π/2), y se van inclinando hasta alinearse con el eje longitudinal del aparato Ox1 , según una ley conocida θ(t). zT x0 θ O x1 z1 OT xT Los ejes ligados al aparato, Ox1 y1 z1 se mantienen siempre paralelos a los fijos en tierra, y a todos los efectos se considerarán como fijos. Se conoce OA = a, AB = b y BC = R. Todos los resultados se proyectarán en los ejes 0. Se pide: 1. Velocidad angular absoluta del rotor derecho (sólido 2), ω 21 , proyectada en los ejes Ox0 y0 z0 solidarios a las barquillas de los motores, en función de ωr y las derivadas de θ. 2. Aceleración angular absoluta de este rotor, α21 . 3. En el instante inicial, aceleración respecto al sistema fijo 1 (ejes aparato) del extremo C de la pala, que en ese momento se encuentra en (b, a + R, 0), aplicando las expresiones del campo de aceleraciones del sólido 2. 4. Calcular esa misma aceleración ~aC 21 mediante la composición de movimientos 2/0 + 0/1, y comprobar que se obtiene la misma expresión. 3.1. COMPOSICIÓN DE MOVIMIENTOS 13 x0 −ωr C ωr θ B O x1 A y1 ≡ y0 z0 θ z1 Problema 3.1.5: Un vehı́culo rectangular (sólido 0), de 4R de largo y 2R de ancho, tiene cuatro ruedas de radio R en los vértices. Todas están contenidas en planos verticales, y ruedan y pivotan sin deslizar sobre el plano horizontal O5 x5 y5 . Las dos delanteras (1 y 2) son directrices y sus planos forman ángulos φ1 y φ2 con Ox0 z0 . Las dos traseras (3 y 4) son motrices y sus planos están fijos respecto a 0. Para que no deslicen en las curvas, el motor las mueve a través de un diferencial, de modo que sus velocidades angulares de r r rodadura cumplen la relación ω45 + ω35 = 2ω, siendo ω constante. Se pide: 1. Determinar φ2 en función de φ1 para que el movimiento 0/5 sea posible. r r 2. Determinar ω45 , ω35 y la velocidad angular del vehı́culo en función de ω y φ1 . 3. En el caso tan φ1 = 2, hallar razonadamente la base y ruleta del movimiento del vehı́culo y la trayectoria de O (punto medio del eje trasero). En el instante inicial, O está sobre O5 y los ejes tienen las mismas direcciones. Con las mismas condiciones iniciales, y manteniendo ω constante, el vehı́culo se mueve de modo que O recorre el arco de cicloide x = R(1 − cos u), y = R(u − sin u), u ∈ [0, 2π]. Se pide: 4. Determinar la ley horaria u = u(t). 5. Hallar la ley de mando de la rueda, φ1 (t), para que O recorra dicha trayectoria. 14 CAPÍTULO 3. COMPOSICIÓN DE MOVIMIENTOS φ2 y5 x0 2 φ1 y0 3 1 O 4 ψ x5 O5 Problema 3.1.6: Un sistema material (un ratón de bola) está apoyado sobre el plano fijo O1 x1 y1 y consta de: Un paralelepı́pedo (S0 ) que se apoya y desliza sobre el plano fijo; lleva asociado el sistema Oxyz de ejes paralelos a los lados. z O Una esfera de radio R (S2 ) cuyo centro está fijo en el punto O de S0 ; rueda y pivota sin deslizar sobre el plano fijo. Dos discos de radio r (S3 y S4 ) que pueden girar libremente alrededor de ejes fijos en S0 ; sus centros son (R + r, 0, 0)0 y (0, R + r, 0)0 , respectivamente, y sus velocidades angulares relativas ω30 = (0, α̇, 0) y ω40 = (β̇, 0, 0); están en contacto sin deslizamiento con la esfera en los puntos A y B respectivamente. z A β α x O B y z1 z y O β̇ b α̇ x1 θ (ξ, η, 0) y1 x Se usarán: (ξ, η), coordenadas en ejes fijos de la proyección de O; θ, ángulo entre O1 x1 y una paralela a Ox; ángulos α y β girados por los discos S3 y S4 alrededor de sus respectivos ejes (ver figuras); velocidad angular absoluta de la esfera, proyectada en ejes S0 : ω21 = (ωx , ωy , ωz )0 . Los resultados se proyectarán en ejes S0 , salvo los que por definición exigen otros. Se pide: 1. Ecuaciones de la ligadura de no deslizamiento de la esfera sobre el plano fijo, proyectadas en ejes S0 . 2. Expresar las componentes de la velocidad angular ω21 en función de α̇, β̇ y θ̇. 3. A continuación se estudia un movimiento particular: Se coloca O sobre el eje O1 z1 , O con los ejes S0 paralelos a los fijos, y se mueve el ratón de modo que v01 = Ω R i1 y θ̇ = Ω, ambos constantes. Calcular ω21 (t). 4. Ecuaciones paramétricas de la axoide fija de la esfera, rAF (t, λ) 5. Identificar qué superficie es. 6. Por razonamientos geométricos, identificar la axoide móvil. 7. Obtener α(t) y β(t), suponiendo que ambas sean nulas en t = 0. 8. Calcular la aceleración angular relativa de la esfera, ω̇20 . 3.1. COMPOSICIÓN DE MOVIMIENTOS 15 Problema 3.1.7: Una esfera de radio a rueda y pivota sin deslizar por el interior de una superficie cónica de revolución de eje Oz1 y semiángulo cónico 60o . El centro C de la esfera describe, con velocidad angular ω constante, una circunferencia de radio a contenida en un plano perpendicular a Oz1 y con centro sobre este eje. Una figura representa la vista general del sistema y la otra es un corte por el plano auxiliar xOz que contiene el centro de la esfera y que gira alrededor de Oz en el curso del movimiento con velocidad angular ω. Se pide: 1. Demostrar que con las condiciones impuestas, el vector velocidad angular de la esfera Ω ha de quedar contenido en el plano xOz. En lo sucesivo supondremos que la relación entre las velocidades de rodadura y de pivotamiento se mantiene constante a lo largo del movimiento. 2. Demostrar que con esta nueva condición el eje instantáneo de rotación de la esfera corta a Oz1 en un punto fijo. 3. Determinar las superficies axoides y la velocidad angular Ω en los siguientes movimientos particulares: a) Cuando en todo momento la velocidad de pivotamiento es nula. b) Cuando la axoide fija se reduce a un plano. c) Cuando el movimiento de la esfera es un movimiento plano. d ) Cuando el punto de tangencia H de la esfera y el eje Oz1 se mantiene fijo. 4. Calcular dΩ/dt en el movimiento particular a). 5. calcular la aceleración de H en este caso particular. Problema 3.1.8: El sistema material de la figura está constituido por: a) Un cono circular recto (Sólido 1) fijo en el espacio de semiángulo en el vértice 30o , radio de la base R y eje vertical Oz1 . b) Un cilindro circular recto (Sólido 2) móvil de altura R y radio de la base R/2. El cilindro rueda, pivota y desliza sobre la superficie exterior del cono de forma que en todo momento tienen una generatriz común. Se sabe que la generatriz de contacto cilindro/cono gira con velocidad angular constante ω alrededor del eje Oz1 , y que la base inferior del cilindro rueda sin deslizar sobre la base del cono. En el movimiento cilindro/cono descrito se pide: 1. Eje instantáneo de rotación y deslizamiento. 2. Velocidad angular. 3. Velocidad angular de rodadura y pivotamiento. 16 CAPÍTULO 3. COMPOSICIÓN DE MOVIMIENTOS 4. Axoides fija y móvil. 5. Aceleración angular. 6. Velocidad del punto M situado en la base superior del cilindro según se indica. Nota: todos los cálculos deben realizarse en los ejes Ox0 y0 z0 que se indican en la figura y que en todo momento acompañan a la generatriz de contacto cilindro/cono. Problema 3.1.9: Se considera el sistema material constituido por: a) Una esfera E, de centro O1 y radio R (sólido 3) cuyo movimiento respecto a un sistema fijo (sólido 1) es una rotación pura de valor ω constante alrededor de un diámetro vertical AB. b) Un plano horizontal π (sólido 4) cuyo movimiento respecto al sólido 1 es también una rotación pura de valor Ω constante alrededor de la vertical AB. Dicho plano está situado a una distancia 2R por debajo del centro O1 de la esfera E. c) Un cono circular recto C (sólido 2) de vértice el punto O (intersección de la recta AB y el plano π), que rueda sin deslizar por el exterior de la esfera y por la cara superior del plano π. En la figura se representa la sección meridiana del sistema material considerado. Los ejes Ox0 y0 z0 están ligados a dicha sección y deben utilizarse para el cálculo de todas las magnitudes vectoriales que intervienen en el problema. Se pide: 1. Velocidad angular absoluta del eje del cono. 2. Velocidad angular absoluta del movimiento absoluto del cono. 3. Axoides fija y móvil del movimiento absoluto del cono. 4. Aceleración angular absoluta del cono. Para el caso en que Ω = −ω/2. 5. ¿Cuáles son las superficies axoides? 6. Aceleración del punto M del cono en contacto con la esfera. 3.1. COMPOSICIÓN DE MOVIMIENTOS 17 Problema 3.1.10: Un diferencial de automóvil está formado por dos conos iguales (sólidos 1 y 2) de eje común y semiángulo en el vértice de 30o . Dichos conos pueden girar libremente alrededor de su eje con movimientos independientes. El tercer cono (sólido 3) de semiángulo en el vértice de 60o , puede moverse sobre los conos anteriores girando alrededor de su eje OE3 y rodando sin deslizar sobre las generatrices de contacto con los conos 1 y 2. El eje del cono 3, OE3 , es un radio fijo de una corona circular (sólido 4) cuyo plano es constantemente perpendicular al eje de los conos 1 y 2, y a la que se comunica una velocidad angular constante Ω4 . Si la velocidad angular del cono 1 es Ω1 , se pide: 1. Velocidades angulares ω 30 y ω 20 . 2. Eje instantáneo de rotación en el movimiento del sólido 3. 3. Axoides fija y móvil del movimiento anterior. 4. Para una velocidad angular Ω4 dada, ¿qué valor debe tomar Ω1 para que el módulo de ω34 sea mı́nimo? ¿Cuál será en ese caso la velocidad angular ω20 ? 5. Representar gráficamente ω20 en función de Ω1 para una Ω4 dada y determinar el valor de Ω1 que hace máxima la rotación de ω20 . Problema 3.1.11: Un disco infinitamente delgado (sólido 2), de radio R, rueda y pivota sin deslizar sobre un plano fijo Ox1 y1 (sólido 1). Sea I el punto de contacto del disco y el plano. Para especificar su configuración se usarán: ξ, η coordenadas en ejes 1 de la proyección del centro del disco C sobre el plano; ψ, θ y ϕ, ángulos de precesión, nutación y rotación propia del disco, respectivamente. Los resultados se proyectarán en los ejes auxiliares Ix0 y0 z0 (sólido 0), con origen en el punto de contacto y girado el ángulo de precesión respecto a S1 . Para el caso general, se pide: 1. Velocidad angular del disco en función de los ángulos de Euler y sus derivadas. 2. Obtener ξ˙ y η̇ en función de los ángulos de Euler y sus derivadas. Del movimiento del disco se sabe que la axoide fija es un cono circular con centro en el origen, eje Oz1 , radio de la base R, y semiángulo en el vértice 30o . En el instante inicial el punto I está sobre el eje Oy1.√La proyección de C se mueve sobre el plano con velocidad de módulo constante ω R 1 + 3/2 . Para este movimiento, se pide: 18 CAPÍTULO 3. COMPOSICIÓN DE MOVIMIENTOS 3. Basándose en las propiedades de las axoides, deducir razonadamente: a) Dirección del vector velocidad angular en el momento inicial b) Axoide móvil c) Valores de los ángulos de Euler en el momento inicial. 4. Velocidad angular del disco. 5. Aceleración angular del disco z0 z1 ϕ y3 z1 z3 θ C θ y0 ψ x1 y1 y1 I O I x0 ≡ x3 Problema 3.1.12: Una esfera de radio a y centro C (S2 ) rueda y pivota sin deslizar sobre un cilindro circular fijo de radio R (S1 ). El punto de contacto M recorre sobre el cilindro la hélice z M z0 β b b C R (cos θ i1 + sin θ j1 + θ tan α k1 ) con velocidad Rω. Sobre la esfera recorre una circunferencia de radio a cos β. De las dos posiciones posibles, la circunferencia queda por encima del centro C. En la resolución convendrá usar los ejes intermedios Mx0 y0 z0 asociados a las coordenadas cilı́ndricas del punto de contacto. Salvo que algún resultado exija otra cosa, las soluciones vectoriales se proyectarán en estos ejes. Se pide: y0 Mb b C θ x0 y x 1. Velocidad angular de Mx0 y0 z0 . 2. Eje instantáneo de rotación del movimiento 2/0. 3. Módulo de la velocidad angular ω20 . 4. Aceleración angular absoluta α21 5. Axoide fija del movimiento 2/1. Problema 3.1.13: Una esfera de radio a se mueve sobre un cilindro circular fijo, de eje vertical y radio R, de manera que: 3.1. COMPOSICIÓN DE MOVIMIENTOS 19 La esfera rueda sin deslizar sobre el cilindro. La velocidad angular de la esfera es un vector de módulo ω(t), contenido en el plano tangente común a los dos sólidos, y que forma un ángulo θ constante con la vertical. En un instante arbitrario la posición del punto geométrico de contacto M viene dada por sus coordenadas cilı́ndricas (ψ, z), y su velocidad v forma un ángulo α con la horizontal. Se pide: 1. Trabajando en los ejes auxiliares Mx0 y0 z0 , determinar la condición de no deslizamiento de la esfera sobre el cilindro, en función de ω, θ, α y v. 2. Hallar v y α en función de ω y θ. Identificar la trayectoria del punto √ M sobre el √ 2 2 cilindro para las condiciones iniciales ψ(0) = 0, z(0) = 0, v(0) = v 2 j1 + 2 k1 . 3. Identificar la trayectoria de M sobre la esfera. Para ello puede ser útil introducir como sistema intermedio el triedro intrı́nseco de la trayectoria de M sobre el cilindro. 4. Ecuaciones paramétricas de la axoide fija. Identificar la axoide móvil, sin necesidad de hallar su ecuación. 5. Aceleración del punto M considerado como de la esfera en el movimiento absoluto. 6. Se estudia ahora el movimiento de la esfera respecto a unos ejes paralelos a los fijos con origen en el centro de la esfera: identificar las axoides fija y móvil, sin hallar sus ecuaciones. 20 CAPÍTULO 3. COMPOSICIÓN DE MOVIMIENTOS 3.2. Movimiento plano Ejercicio 3.2.1: En un movimiento plano, una recta del plano móvil pasa siempre por un punto fijo O, y un punto de la recta describe una circunferencia que pasa por O. Hallar la base y la ruleta. Ejercicio 3.2.2: La base de un movimiento es una recta, y un punto del plano móvil recorre otra recta que forma un ángulo ϕ con la anterior. Hallar la ruleta. Ejercicio 3.2.3: En un cuadrilátero plano ABCD, AB = CD = a, BD = AC = b > a, CD es fijo. Hallar la base y la ruleta del movimiento de AB. Ejercicio 3.2.4: Repetir el ejercicio anterior para el caso b < a. Ejercicio 3.2.5: En un movimiento plano la base es una recta y un punto del plano móvil describe una circunferencia tangente a la base. Hallar la ruleta. Ejercicio 3.2.6: En un movimiento plano, la base es una recta y un punto describe la catenaria y = a cosh xa . Hallar la ruleta. Ejercicio 3.2.7: En un movimiento plano, una circunferencia del plano móvil pasa siempre por un punto fijo P , y un punto M de esta circunferencia describe una recta r que pasa por P . 1. Hallar la base y la ruleta del movimiento. 2. Ecuación del movimiento del punto que tiene trayectoria rectilı́nea admitiendo que la velocidad de sucesión de los centros instantáneos es una constante v. Problema 3.2.1: Los engranajes A, B, C, que aparecen en la figura, están unidos por un pasador en su centro a la barra ABC. El engranaje A es fijo, mientras que la barra ABC gira en sentido contrario a las agujas del reloj con una velocidad angular ω constante. Sabiendo que en su movimiento los engranajes ruedan sin deslizar sobre sus circunferencias primitivas de radios RA > RB > RC , calcular: 1. Velocidad angular del engranaje B en su movimiento absoluto. 2. Base y ruleta del engranaje B en dicho movimiento. 3. Velocidad angular del engranaje C en su movimiento absoluto. ¿Depende del tamaño del engranaje intermedio? 4. Velocidad del engranaje C respecto del engranaje B. 5. Base y ruleta del engranaje C en su movimiento absoluto. 6. Aceleración lineal del diente del engranaje C situado en cada instante en el punto de tangencia entre las circunferencias primitivas de los engranajes C y B. 3.2. MOVIMIENTO PLANO 21 Problema 3.2.2: La figura representa un tren de engranajes planetario con los siguientes elementos: Sol: Rueda de radio 2r que gira respecto de su eje fijo a tierra. Planetarios: Ruedas de radio r cuyos ejes están articulados al brazo AB. Brazo: Barra AB articulada tanto al engranaje sol como a los planetarios. Posee una velocidad angular constante ω0 en el sentido de las agujas del reloj. Corona: Engranaje estático y concéntrico con el sol. Teniendo en cuenta que durante la transferencia del movimiento rotatorio las ruedas acopladas ruedan sin deslizar, calcular: 1. Velocidad angular de los engranajes planetarios respecto al brazo. 2. Velocidad angular absoluta de los engranajes planetarios. 3. Velocidad angular absoluta del engranaje sol. 4. Velocidad lineal absoluta del punto C del planetario. 5. Aceleración lineal absoluta del punto C del planetario. NOTA: se recomienda utilizar los ejes OXY Z ligados al brazo y la numeración de sólidos de la figura. Problema 3.2.3: Una varilla AB, de longitud 2a, se mueve en un plano, referido a unos ejes ortogonales O1 X1 Y1 de forma que su extremo A describe el eje O1 X1 con velocidad constante v, mientras que la velocidad del extremo B forma con la varilla el mismo ángulo que esta forma con el eje O1 X1 . 22 CAPÍTULO 3. COMPOSICIÓN DE MOVIMIENTOS En el instante inicial la varilla está situada sobre el eje O1 Y1 encontrándose el extremo B en la parte negativa de dicho eje. Se pide: 1. Determinar en función del tiempo la velocidad angular y1 de la varilla. 2. Determinar la base y la ruleta correspondientes al movimiento de la varilla. 3. Determinar el valor máximo de la aceleración angular de la varilla. O1 θ vB θ A v x1 B Problema 3.2.4: Consideremos un plano horizontal referido a dos ejes ortogonales Oxy. Sea Oz la vertical que pasa por O. Sobre los ejes Ox, Oy ruedan sin deslizar dos discos iguales A y B de radio R que quedan contenidos respectivamente en los planos Oxz, Oyz. Sean x, y las distancias de los centros de los discos al eje Oz. Un plano P que se mantiene horizontal en todo momento se apoya en ambos discos rodando y pivotando sobre ellos sin deslizamiento. El movimiento del disco B viene determinado por la ecuación y = a sin ω t y el disco A vendrá obligado por las ligaduras cinemáticas que tiene impuestas. Si inicialmente vale x = a, se pide: 1. Demostrar que la distancia entre los centros de ambos discos se mantiene constante a lo largo del movimiento verificándose la relación x2 + y 2 = a2 . 2. Calcular la velocidad angular Ω del plano P . 3. Determinar la base del plano P . 4. Determinar e identificar la trayectoria del punto de P que inicialmente se proyecta en O. 5. Determinar la ruleta del movimiento de P .