Martinez, G. J. and Adamatzky, A. (2015) Comportamiento colectivo
no trivial en sistemas complejos con mini-robots. In: ESCOM IPN
seminar, Mexico City, Mexico, 8 September 2015. National Polytechnic Institute: LCCOMP Available from: http://eprints.uwe.ac.uk/26735
We recommend you cite the published version.
The publisher’s URL is:
http://uncomp.uwe.ac.uk/genaro/Papers/Talks.html
Refereed: Yes
(no note)
Disclaimer
UWE has obtained warranties from all depositors as to their title in the material
deposited and as to their right to deposit such material.
UWE makes no representation or warranties of commercial utility, title, or fitness for a particular purpose or any other warranty, express or implied in respect
of any material deposited.
UWE makes no representation that the use of the materials will not infringe
any patent, copyright, trademark or other property or proprietary rights.
UWE accepts no liability for any infringement of intellectual property rights
in any material deposited but will remove such material from public view pending investigation in the event of an allegation of any such infringement.
PLEASE SCROLL DOWN FOR TEXT.
COMPORTAMIENTO COLECTIVO NO
TRIVIAL EN SISTEMAS COMPLEJOS
CON MINI-ROBOTS
Genaro Juárez Martínez
http://uncomp.uwe.ac.uk/genaro/
Laboratorio de Ciencias de la Computación (LCCOMP)
Escuela Superior de Cómputo, Instituto Politécnico Nacional, México D.F.
International Center of Unconventional Computing (ICUC)
University of the West of England, Bristol, United Kingdom
Seminario de Investigación de ESCOM
México D.F., a 8 de septiembre de 2015
COLABORACIÓN EN MÉXICO
Estephania Molina Delgado
Luz Noé Oliva Moreno
Rosa Graciela Chávez Barrera
COLABORACIÓN EN INGLATERRA
Andrew Adamatzky
Jeff Jones
RESUMEN / INTRO
Se discutirá el problema del fenómeno comportamiento colectivo no trivial,
frecuentemente referido como auto-organización, en sistemas complejos
analizado a través de mini-robots. Durante la conferencia se presentarán
algunos prototipos desarrollados en la Escuela Superior de Cómputo del
Instituto Politécnico Nacional en conjunto con la University of the West of
England en el Reino Unido. Además se presentará el proyecto de
investigación swarm-robotics, que actualmente se está impulsado en
ESCOM.
NON-TRIVIAL COLLECTIVE BEHAVIOUR
videos source: youtube
NON-TRIVIAL COLLECTIVE BEHAVIOUR
videos source: youtube
CLASSES IN CELLULAR AUTOMATA
Stephen Wolfram defines his classification in simple
rules (1986), known as elementary cellular
automata. Also, this classification is extended to any
dimension.
• A CA is class I, if there is a stable state xi ∈ Σ,
such that all finite configurations evolve to the
homogeneous configuration.
• A CA is class II, if there is a stable state xi ∈ Σ,
such that any finite configuration become
periodic.
• A CA is class III, if there is a stable state, such
that for some pair of finite configurations ci and
cj with the stable state, is decidable if ci evolve to
cj, such that any configuration become chaotic.
video source: youtube
• Class IV includes all previous CA, also called
complex. [Culik II & Yu, 1988]
Stephen Wolfram, Cellular Automata and Complexity, Addison-Wesley Publishing Company, 1994.
Karel Culik II and Sheng Yu, Undecidability of CA Classification Schemes, Complex Systems 2, 177-190, 1988.
Harold V. McIntosh, One Dimensional Cellular Automata, Luniver Press, United Kingdom, 2009.
Genaro J. Martínez, A Note on Elementary Cellular Automata Classification, Journal of Cellular Automata 8(3-4) 233-259, 2013.
COMPLEXITY, CHAOS, PATTERNS, AND BEYOND …
Andrew Adamatzky (Ed.)
Game of Life Automata,
Springer, 2010.
Genaro J. Martínez, Andrew
Adamatzky, and Harold V.
McIntosh, Localization
dynamics in a binary twodimensional cellular
automaton: the Diffusion
Rule, Journal of Cellular
Automata 5(4-5), 289-313,
2010.
Andrew Wuensche, Exploring
Discrete Dynamics, Luniver
Press, United Kingdom, 2011.
6
H. Chafe and P.
formal setting, as local structure theory at order 1,12) a framework which provides
natural extensions to the simplest approximation. For the two-state rules considered
Manneville
here, the approximation produces an iterative map f for the concentration c of "1"
sites which is the expectation value of state "1":
COLLECTIVE BEHAVIOUR IN SPATIALLY EXTENDED SYSTEMS
following, a rule will thus be denoted as:
ct=Pr{A/=I}=I- Pr{A/=O}.
Spatially extended systems with local interactions
and synchronous updating are of fundamental
And since of
the rules
totalistic,
importance in trying to understand the nature
the are
complexity
exhibited by such phenomena
as
developed
and neural
dynamics.
the neighborhood
are clearly
definedpr{Ar
in the=I}=
context. S (C(l/)=S}.
if the
lattice andturbulence
'J/
1
s=o
The simple mean-field analysis described here is also known, in a somewhat more
formal setting, as local structure theory at order 1,12) a framework which provides
natural extensions to the simplest approximation. O.BFor the two-state rules considered
0.8
here, the approximation produces an iterative map f for the concentration c of "1"
0.6
sites which is the expectation value of state "1": 0.6
Mean field approximation
ct=Pr{A/=I}=I- Pr{A/=O}.
And since the rules are totalistic,
pr{Ar =I}=
'J/
S (C(l/)=S}.
1
s=o
0.4
0.4
0.2
0.2
o.0
x
O. 0
LLLL..L.L..L..L.L...L.L-'---.l-'---1..LJc.=I..J.....L..L.L..L..L..L..J
0.0
0.2
0.4
0.6
O.B
1.0
0.0
0.8
O.B
0.6
0.6
0.6
0.4
0.6
0.8
1.0
(b)
(a)
O.B
0.2
0.4
0.4
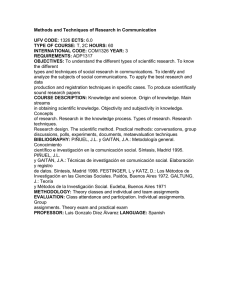
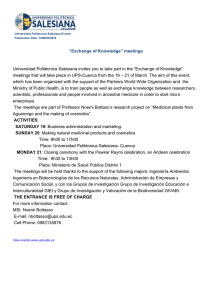
Hugues
Chaté and Paul Manneville, Collective0.4
Behaviours in Spatially Extended Systems with
Local
0.2 Interactions and Synchronous Updating,0.2
Progress of Theoretical Physics, Vol. 87, No. 1, 1992.
o.0
x
0.2
0.4
0.6
O.B
O. 0
0.0
LLLL..L.L..L..L.L...L.L-'---.l-'---1..LJc.=I..J.....L..L.L..L..L..L..J
0.0
0.2
1.0
0.2
0.4
O. 0
0.6
O.B
(c)
0.0
0.2
0.4
0.6
0.8
1.0
Fig.1. Three types of mean-field maps: (a) X =0 is
an unstable fixed point (Smln=l, map R2 3 ); (b)
the map has another attractor (chaotic) than X
=0 (map /]2 6 ); (c) X =0 is the only attract or
(map /128).
1.0
NON-TRIVIAL COLLECTIVE BEHAVIOUR IN CELLULAR AUTOMATA
Non-trivial collective behaviour in 2D cellular automata (von Neumann function)
Harold V. McIntosh, IX Verano de Investigation 1999, Verano de la Investigación Científica, Departamento Aplicación de
Microcomputadoras, UAP, 1999.
Genaro J. Martínez, Comportamiento colectivo no trivial en sistemas dinámicos caóticos, Verano de la Investigación
Científica, Departamento Aplicación de Microcomputadoras, UAP, 1998.
KILOBOT PROJECT, HARVARD UNIVERSITY, USA
video source: Harvard University and youtube.
SWARM ROBOTICS PROJECT, ESCOM-MEXICO, UWE-UK
Spatially extended systems with local interactions and synchronous updating are of fundamental
importance in trying to understand the nature of the complexity exhibited by such phenomena
as developed turbulence and neural dynamics.
Cubelets reprogramming
Low cost mini robots
SWARM ROBOTICS PROJECT, ESCOM-MEXICO, UWE-UK
SWARM ROBOTICS PROJECT, ESCOM-MEXICO, UWE-UK
CONCLUSIONES Y DEMOSTRACIÓN
Proyectos e investigación en progreso:
•
•
•
Implementación de nuevos algoritmos.
Experimentación para seguimiento autómatico con slime mould.
Implementación de un sistema de seguridad para ESCOM …
Andrew Adamatzky, Physarum Computers, World Scientific Press, 2010.
Jeff Jones, From Pattern Formation to Material Computation, Springer 2015.
FIN
Gracias por su atención!
Computer Science Laboratory (LCCOMP)
http://uncomp.uwe.ac.uk/LCCOMP/en/
International Center of Unconventional Computing (ICUC)
http://uncomp.uwe.ac.uk/
Complex Systems Group IPN (CCSIPN)
http://comunidad.escom.ipn.mx/sistemascomplejos/
 0
0


![[OLD] If to Registry Operator, addressed to: Sener Ingeniería](http://s2.studylib.es/store/data/006341224_1-6cf7f4124f09262d7ab9c034d2147df9-300x300.png)