- Ninguna Categoria
Método de decisión borrosa de si un efecto es impacto ambiental
Anuncio
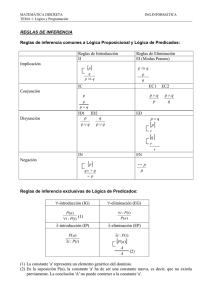
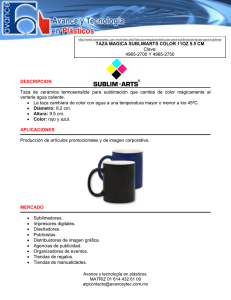
Método de decisión borrosa de si un efecto es impacto ambiental y su carácter Gallego Martín, Enrique - [email protected] González de Paula, Luis - [email protected] Garmendia Salvador, Luis - [email protected] Dpto. Ingeniería Software e Inteligencia Artificial. Facultad de Informática, Universidad Complutense de Madrid, Spain Garmendia Salvador, Alfonso - [email protected] Instituto Agroforestal Mediterráneo. Universidad Politécnica de Valencia. RESUMEN Se propone un método borroso para decidir si un efecto es impacto ambiental, y para decidir el carácter del mismo. Palabras claves: Evaluación de impacto ambiental, EIA, impacto ambiental, efecto ambiental, factor ambiental, evaluación de impacto, Xfuzzy, lógica borrosa. ABSTRACT A new method is proposed to decide whether an effect should be considered an environmental impact and to decide its character . Keywoards Environmental impact assessment; EIA; environmental impact; environmental effect; action execution; factor environmental; impact assessment; Xfuzzy; fuzzy logic. Jornadas Internacionales de Didáctica de las Matemáticas en Ingeniería 261 Método de decisión borrosa de si un efecto es impacto ambiental y su carácter 1. INTRODUCCIÓN En los últimos años, debido al aumento de los problemas ambientales, el medio ambiente cobra especial reconocimiento e importancia por lo que se hace indispensable incorporar el concepto medioambiental como factor de garantía del progreso. En este sentido, la evaluación de impacto ambiental (EIA) constituye una de las herramientas de protección ambiental que fortalece la toma de decisiones a nivel de políticas, planes, programas y proyectos, ya que incorpora variables que tradicionalmente no han sido consideradas durante su planificación, diseño o implementación. Definición 1.1. Factores ambientales [1]: Son los distintos componentes del Medio Ambiente entre los cuales se desarrolla la vida en nuestro planeta. Pueden ser modificados por las acciones humanas, en ocasiones, provocando grandes alteraciones que pueden ocasionar graves problemas, generalmente difíciles de valorar. Definición 1.2. Impacto ambiental [1]: La alteración, modificación o cambio en el ambiente, o en alguno de sus componentes de cierta magnitud y complejidad originando o producido por los efectos de la acción o actividad humana que produce un cambio, generalmente negativo, de la calidad ambiental. Esta acción puede ser parte de un proyecto de ingeniería, un programa, un plan, o una disposición administrativo-jurídica con implicaciones ambientales. Definición 1.3. Evaluación de Impacto Ambiental (EIA) [1]: Es un procedimiento jurídico-técnico-administrativo que tiene por objeto la identificación, predicción e interpretación de los impactos ambientales que un proyecto o actividad produciría en caso de ser ejecutado; así como la prevención, corrección y valoración de los mismos. Todo ello con el fin de ser aceptado, modificado o rechazado por parte de las distintas Administraciones Públicas competentes. Otra definición la considera como el conjunto de estudios y sistemas técnicos que permiten estimar los efectos que la ejecución de un determinado proyecto, obra o actividad, causa sobre el medio ambiente. Un impacto ambiental viene identificado por el efecto de una acción simple de una actividad sobre un factor ambiental y ambos elementos, acción y factor, deben quedar explícitos en la definición que se haga de él. Definición 1.4. Caracterización de los impactos [1]: Consiste en describir los impactos identificados y considerados significativos o notables, según una serie de atributos. Este artículo propone el uso de técnicas de lógica borrosa (fuzzy logic) para decidir si un efecto es impacto ambiental, y para decidir el carácter del mismo, lo cual 262 Jornadas Internacionales de Didáctica de las Matemáticas en Ingeniería Método de decisión borrosa de si un efecto es impacto ambiental y su carácter aumenta la potencia a la hora de modelar, inferir y decidir sobre conceptos de gran subjetividad. 1.1 INTRODUCCIÓN A LA LÓGICA BORROSA Y AL RAZONAMIENTO APROXIMADO La Teoría de los Conjuntos Difusos o Conjuntos Borrosos (“fuzzy sets” en inglés) se aplica con éxito para modelar información con falta de nitidez incertidumbre y para resolver problemas de control. Lotfi A. Zadeh [16] en 1965 escribe su artículo “Fuzzy Sets” en el que los conjuntos difusos, de frontera no precisa y cuya función de pertenencia indica un grado. Las lógicas borrosas necesitan generalizar las conectivas para definir la intersección, unión y negación entre conjuntos borrosos, para lo cual se utilizan diferentes familias de operadores llamadas normas triangulares, conormas triangulares y negaciones [12]. En control es habitual definir reglas borrosas para efectuar inferencias y razonamiento aproximado de la forma: Si ‘x es P’ entonces ‘y es Q’ ‘x es casi P‘ _____________________ ‘y es casi Q’ donde x, y son variables y P, Q son conjuntos borrosos y la regla es una relación borrosa que se puede definir con diferentes operadores de implicación [15]. 2. DECISIÓNES EN EIA Se considerarán dos casos de estudio relacionados entre sí: - Toma de decisión de si un efecto ambiental produce impacto o no. - Toma de decisión del carácter del impacto ambiental en los efectos ambientales que produzcan impacto. 2.1. Inferencia de efecto/impacto Se tratará de inferir mediante la utilización de lógica borrosa el simple enjuiciamiento de un efecto, es decir, si el mismo es despreciable o significativo (impacto). Para definir nuestro sistema partiremos inicialmente de las definiciones de los conceptos, con el fin de obtener los conjuntos borrosos y las reglas que se usarán para la inferencia. Jornadas Internacionales de Didáctica de las Matemáticas en Ingeniería 263 Método de decisión borrosa de si un efecto es impacto ambiental y su carácter 2.1.1. Descripción del modelo Podemos considerar las siguientes definiciones, incluidas en el libro “Evaluación de impacto ambiental” [1]. “Efecto ambiental notable: es aquel que es significativo y al que se considera un impacto ambiental. Es aquel que se manifiesta como una modificación del medio ambiente, de los recursos naturales, o de sus procesos fundamentales de funcionamiento…”. “Efecto ambiental mínimo (despreciable): aquel que puede demostrarse que no es notable”. 2.2. Inferencia del carácter del impacto En este segundo caso de estudio se tratará de inferir mediante lógica borrosa el carácter de un impacto, es decir, si es compatible, moderado, severo o crítico. Para definir nuestro sistema partiremos nuevamente de las definiciones de los conceptos. 2.2.1. Descripción del modelo Podemos considerar las siguientes definiciones, extraídas del mismo libro que en el caso de estudio anterior: “Impacto ambiental compatible: aquel cuya recuperación es inmediata tras el cese de la actividad, y no precisa prácticas protectoras o correctoras”. “Impacto ambiental crítico: aquel cuya magnitud es superior al umbral aceptable. Con él se produce una pérdida permanente de la calidad de las condiciones ambientales, sin posible recuperación, incluso con la adopción de medidas protectoras o correctoras”. “Impacto ambiental moderado: aquel cuya recuperación no precisa prácticas protectoras o correctoras intensivas, y en el que la consecución de las condiciones ambientales iniciales requiere cierto tiempo”. “Impacto ambiental severo: aquel en el que la recuperación de las condiciones del medio exige la adecuación de medidas protectoras o correctoras, y en el que, aun con esas medidas, aquella recuperación precisa un periodo de tiempo dilatado”. 264 Jornadas Internacionales de Didáctica de las Matemáticas en Ingeniería Método de decisión borrosa de si un efecto es impacto ambiental y su carácter 3.1 SISTEMAS DE DECISIÓN BORROSA DEL EFECTO/IMPACTO 3.1.1. Entradas del sistema - Modificación del medio ambiente. - Modificación de los recursos naturales. - Modificación de los procesos fundamentales de funcionamiento. 3.1.2. Salida del sistema - Juicio del efecto (despreciable/significativo). 3.1.3. Tipos a considerar Sobre cada variables se definen conjuntos borrosos, los cuales contienen funciones de pertenencia distribuidas a lo largo del universo de discurso que modelan un concepto. En caso de las variables de entrada se ha definido el tipo tModificacion, y para la variable de salida tEfecto. Para el caso del tipo tModificacion se ha considerado un universo de discurso en un intervalo booleano [0,1], dejando la cardinalidad por defecto (valor 256), definiendo así los diferentes conjuntos borrosos “poco” o “mucho”. A continuación se muestra en detalle la definición del tipo, incluyendo la función de distribución: Figura 1: Conjuntos borrosos “Poco” y “Mucho” sobre la variable Modificación Jornadas Internacionales de Didáctica de las Matemáticas en Ingeniería 265 Método de decisión borrosa de si un efecto es impacto ambiental y su carácter En el caso del tipo tEfecto se ha considerado de nuevo un universo de discurso en un intervalo [0,1], dejando la cardinalidad por defecto como en el caso anterior, definiendo así los conjuntos borrosos “despreciable” o “significativo”: Figura 2: Conjuntos borrosos “Despreciable” y “Significativo” sobre la variable Modificación 3.1.4. Reglas de inferencia A continuación es necesario modelar el sistema de inferencia, que estará basado en reglas del tipo condicional (if ‘variable entrada es conjunto borroso’ entonces ‘variable salida es conjunto borroso’). Para nuestro caso se definen las reglas que modelan el concepto de efecto despreciable y significativo obtenidas a partir de las definiciones teóricas indicadas anteriormente: 266 Figura 3: Reglas de inferencia borrosas Jornadas Internacionales de Didáctica de las Matemáticas en Ingeniería Método de decisión borrosa de si un efecto es impacto ambiental y su carácter Como podemos apreciar en la siguiente imagen, se han creado una serie de variables de entrada y salida según los tipos definidos anteriormente, a partir de las cuales se han definido las reglas: 3.1.5. Operadores Ahora se procede a definir el conjunto de operadores a usar, basado en la lógica del producto y de la suma, dejando el indicado en cada caso por defecto. Figura 4: Elección de operadores (de t-norma y t-conorma) 3.1.6. Motor de inferencia Procedemos a formalizar el motor de inferencia basado en las variables, operadores y reglas definidas anteriormente, conformando finalmente el sistema. Jornadas Internacionales de Didáctica de las Matemáticas en Ingeniería 267 Método de decisión borrosa de si un efecto es impacto ambiental y su carácter Figura 5: Motor de inferencia Finalmente se realizan una serie de pruebas de inferencia, a partir de las cuales podemos determinar el grado de pertenencia de cada regla al conjunto de salida, confirmando la correcta distribución de los mismos. 3.2. SISTEMA DE DECISIÓN BORROSA DEL CARÁCTER DE UN IMPACTO 3.2.1. Entradas del sistema - Tiempo/periodo de recuperación. - Se precisan medidas correctoras. 3.2.2. Salida del sistema - Carácter del impacto (compatible/moderado/severo/crítico). 3.2.3. Tipos a considerar En caso de las variables de entrada se ha definido el tipo tRecuperacion y tCorrectora y para la variable de salida tImpacto. Para el caso del tipo tRecuperacion se ha considerado un universo de discurso en un intervalo booleano [0,1], dejando la cardinalidad por defecto (valor 256), definiendo así los diferentes conjuntos borrosos “inmediata”, “dilatada” o “sin recuperación”. A 268 Jornadas Internacionales de Didáctica de las Matemáticas en Ingeniería Método de decisión borrosa de si un efecto es impacto ambiental y su carácter continuación se muestra en detalle la definición del tipo, incluyendo la función de distribución. Figura 6: Conjuntos borrosos sobre el tipo de recuperación Jornadas Internacionales de Didáctica de las Matemáticas en Ingeniería 269 Método de decisión borrosa de si un efecto es impacto ambiental y su carácter En el caso del tipo tCorrectora se ha considerado de nuevo un universo de discurso en un intervalo [0,1], dejando la cardinalidad por defecto como en el caso anterior, definiendo así los conjuntos borrosos “no” o “si”: Figura 7: Conjuntos borrosos sobre el tipo de medida correctora En el caso del tipo tImpacto se ha considerado un universo de discurso en un intervalo [0,1], dejando la cardinalidad por defecto como en los casos anteriores, definiendo así los conjuntos borrosos “compatible”, “moderado”, “severo” o “crítico”: Figura 8: Conjuntos borrosos sobre el carácter del impacto 3.2.4. Reglas de inferencia Se procede a modelar el sistema de inferencia, que estará basado en reglas del tipo condicional (if ‘premisa’ then ‘conclusion’). Para nuestro caso se definen las reglas a partir de las definiciones teóricas. 270 Jornadas Internacionales de Didáctica de las Matemáticas en Ingeniería Método de decisión borrosa de si un efecto es impacto ambiental y su carácter Figura 9: Reglas de inferencia para aprender el caracter del impacto 3.2.6. Motor de inferencia Procedemos a formalizar el motor de inferencia basado en las variables, operadores y reglas definidas anteriormente, conformando finalmente el sistema. Figura 10: Motor de inferencia para aprender el caracter del impacto Tras un proceso de ‘defuzzyficación’ de los conjuntos borrosos aprendidos se puede decidir el carácter del impacto. 4. EJEMPLOS A continuación se muestra una serie de ejemplos de uso de los motores de inferencia difusos obtenidos. Se han realizado en JAVA, como parte de la aplicación EIA09. Xfuzzy presenta la función de exportar el modelo difuso diseño a clases JAVA. 4.1. Ejemplo asistente difuso: efecto/impacto. Desde el software EIA09, en el momento de crear un efecto a partir de un factor y una acción determinada, se procede a lanzar el asistente de decisión difuso, para inferir si el efecto es impacto (significativo) o no (despreciable), para ello se contestarán a las Jornadas Internacionales de Didáctica de las Matemáticas en Ingeniería 271 Método de decisión borrosa de si un efecto es impacto ambiental y su carácter preguntas, ajustando la respuesta con ayuda de los slider. Una vez realizado este paso, pulsando en Inferir, obtendremos el resultado de la inferencia mediante el motor difuso. Por ejemplo, si indicamos: Que se modifica muy poco el medio ambiente, desplazando el slider hacia un valor de 0.1. Que se modifican poco los recursos naturales, desplazando el slider hacia un valor de 0.2. Que los procesos fundamentales de funcionamiento se modifican un término medio hacia poco, desplazando el slider hacia un valor de 0.4. El motor de inferencia nos estima que es un efecto despreciable, por lo que no es impacto, con un valor de 0.49. Figura 13: Asistente difuso efecto/impacto en EIA09 4.2. Ejemplo asistente difuso: carácter de impacto Desde el software EIA09, a partir de un impacto valorado completamente, se procede a lanzar el asistente de decisión difuso, para inferir el carácter de dicho impacto: compatible, moderado, severo o crítico. Por ejemplo, si indicamos: Que se tiende a precisar medidas correctoras, desplazando el slider hacia un valor de 0.8. 272 Jornadas Internacionales de Didáctica de las Matemáticas en Ingeniería Método de decisión borrosa de si un efecto es impacto ambiental y su carácter Que la recuperación del medio es dilatada, desplazando el slider hacia un valor de 0.5. El motor de inferencia nos estima que es un impacto severo, con un valor de 0.586. Figura 14: Asistente difuso carácter de impacto en EIA09 5. CONCLUSIONES Se ha modelado un sistema de inferencia borrosa para decidir el tipo de efecto y su caracter, modelando conjuntos borrosos con los conceptos relevantes y definiendo reglas de inferencia borrosa. En futuros trabajos se probarán dichos métodos de decisión con diferentes lógicas borrosas. 5. REFERENCIAS BIBLIOGRÁFICAS [1] GARMENDIA SALVADOR, A; SALVADOR ALCAIDE, A; CRESPO SÁNCHEZ, C; GARMENDIA SALVADOR, L; Evaluación de Impacto Ambiental. 1ª Edición (2005). Pretince Hall: Pearson Education. ISBN: 84-205-4398-5. Pág: 366-368. [2] IMSE Centro Nacional de Microelectrónica. Herramientas de CAD para Lógica Difusa. Xfuzzy 3.0. http://www.imse.cnm.es (2003). [3] KLIR G. and YUAN, B. (1995). “Fuzzy Sets and Fuzzy Logic Theory and its Applications” Prentice Hall. Jornadas Internacionales de Didáctica de las Matemáticas en Ingeniería 273 Método de decisión borrosa de si un efecto es impacto ambiental y su carácter [4] LEWIS, H.W. (1997), “The Foundations of Fuzzy Control”.,Springer. [5] NGUYEN, H.T. and WALKER, E. A., (1996). “A first course in Fuzzy Logic”. CRC Press. [6] OH, S., PEDRYCZ, W., PARK, B. (2002), “Hybrid identification of fuzzy rulebased models”. Int. Journal of Intelligent Systems, vol. 17 (1), pp.77-103. [7] PEDRYCZ, W., (1991), “Fuzzy Dynamic Systems”. IJCAI, Fuzzy Logic and Fuzzy Control, pp. 37-44, Sydney, Australia. [8] PEDRYCZ, W.: Modelling with fuzzy sets in fuzzy control. Fuzzy Days, 3-34, 1992. [9] PIEGAT, A., (2001). “Fuzzy Modeling and Control”. Springer [10] PRADERA, A., TRILLAS, E., CUBILLO, S., (2000) “On modus ponens generating functions” Int. J. Uncertain. Fuzziness Knowledge Based Systems 8, 1, pp. 7-19. [11] SUGENO, M., (1985), “An introductory survey of fuzzy control”. Information Sciences, n. 36, pp. 59-83. [12] SCHWEIZER B. and SKLAR, A., (1960), “Probabilistic Metric Spaces”. NorthHolland, New York. [13] TRILLAS E. and VALVERDE, L. (1985), “On mode and implication in approximate reasoning”, Approximate reasoning in expert systems, Eds. M. M. Gupta, North-Holland. pp. 157-166. [14] TRILLAS, E., ALSINA, C. and TERRICABRAS, J. M. (1995) “Introducción a la Lógica Borrosa”. Editorial Ariel. [15] TRILLAS, E., and VALVERDE, L. (1985). “On mode and implication in approximate reasoning”. Approximate reasoning in expert systems. Eds. M. M. Gupta. North-Holland. pp. 157-166. [16] ZADEH, L.A. (1965), “Fuzzy sets”. Proceedings of the IEEE (Information and Control), Vol:8: pp. 338-353. 274 Jornadas Internacionales de Didáctica de las Matemáticas en Ingeniería
 0
0
Anuncio
Documentos relacionados


Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados