fundamentos físicos de la ingenieria tercera sesión de prácticas
Anuncio

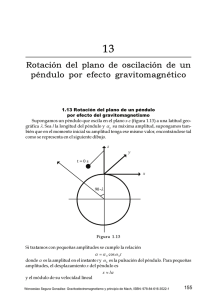
DEPARTAMENTO DE FÍSICA APLICADA ESCUELA TÉCNICA SUPERIOR DE INGENIEROS AGRÓNOMOS Y DE MONTES UNIVERSIDAD DE CÓRDOBA FUNDAMENTOS FÍSICOS DE LA INGENIERIA TERCERA SESIÓN DE PRÁCTICAS 7.- Coeficiente de rozamiento 8.- El giroscopio 9.- Determinación de la aceleración de la gravedad 7 .- Coeficiente de rozamiento Objeto: Determinar los coeficientes de rozamiento estático y cinético entre distintas superficies y comprobar la dependencia de la fuerza de rozamiento máxima respecto a la fuerza normal entre las superficies. Material: Superficie plana horizontal. Piezas con diferentes superficies de contacto (plástico, fieltro, goma espuma). Dinamómetros de 100 y 250 pondios. Pesas de 100 g y 200 g. Fundamento: Las fuerzas de rozamiento surgen entre dos cuerpos puestos en contacto cuando se intenta deslizar uno respecto al otro. Se deben, en parte, a las rugosidades o asperezas de las superficies en contacto y también a la tendencia de dichas superficies a formar enlaces atómicos que las adhieren entre sí. Estas fuerzas de rozamiento son de magnitud limitada y no serán suficientes para impedir el movimiento cuando las fuerzas aplicadas sean suficientemente grandes. Supongamos un bloque de masa m colocado sobre una superficie plana horizontal al que aplicamos una fuerza F también horizontal. Si F es pequeña el bloque no se moverá y el equilibrio se mantiene. En este caso la fuerza de rozamiento estática fs entre las superficies es igual a F. Si F aumenta F progresivamente también lo hará fs y llegará un mg f momento en que nos acercamos a una situación en la que el movimiento es inminente y el equilibrio está a punto de romperse, es decir la fuerza de rozamiento N alcanza su valor máximo fsmax . Este valor máximo se Figura 7-1 ha comprobado experimentalmente que es proporcional a la fuerza normal entre las superficies en contacto. El coeficiente de proporcionalidad es el coeficiente de rozamiento estático, µs f s ≤ µs N (7.1) Si F aumenta ligeramente, la fuerza de rozamiento ya no puede equilibrarla y se inicia el movimiento, que generalmente puede observarse que es acelerado. Es decir, cuando las dos superficies se deslizan una respecto a otra f desciende desde fsmax hasta fk, a esta última se llama fuerza de rozamiento cinético y permanece aproximadamente constante. f k = µk N 7.1 (7.2) Los coeficientes µs y µk no dependen del área de las superficies en contacto, dependen fundamentalmente de la naturaleza de las superficies y de su grado de pulimentación. Debe observarse que ambos coeficientes son el cociente de dos fuerzas perpendiculares, por lo que son adimensionales y representan la tangente que la resultante de ambas fuerzas forma con la normal a las superficies. f Equilibrio Movimiento fsmax = µ s N Una vez iniciado el movimiento, si F es justamente igual a f k = µk N , el movimiento es uniforme y por lo tanto la velocidad constante, recorriéndose espacios iguales en tiempos iguales. fk F Figura 7-2 Fuerza de rozamiento Método: m Para cada pareja de superficies (i) Determinar el peso del bloque con el dinamómetro, anotarlo con sus unidades y el error. Figura 7-3 (ii) Colocar el sistema según el esquema de la Figura 7-3 . (iii) Usando el dinamómetro, medir la máxima fuerza de tracción horizontal a la que el bloque permanece en equilibrio. Esta es la máxima fuerza de rozamiento estática fsmax = µ s N . Anotarla con sus unidades y error. (iv) Medir la fuerza de tracción horizontal que mantiene un movimiento uniforme sobre la superficie. Esta es la fuerza de rozamiento por deslizamiento fk = µ k N . (v) Repetir las medidas (iii) y (iv) añadiendo 100 g, 200g y 300g sobre el bloque. Anotar los pesos totales y los valores de las fuerzas de tracción obtenidos en cada caso en la tabla. (vi) Representar los pares de valores N, fs y N, fk obtenidos para cada par de superficies en una gráfica, representando en ordenadas la fuerza de rozamiento y en abscisas la fuerza normal. Ajustar una recta a cada conjunto de datos (superficie y tipo de rozamiento). Comprobar que los coeficientes de rozamiento estático y cinético son las pendientes de las rectas respectivas para cada superficie. 7.2 Resultados: Superficie: N( ) fs ( ) fk ( ) µs = fs N µk = fk N fs ( ) fk ( ) µs = fs N µk = fk N Valores medios Superficie: N( ) Valores medios Cuestiones: (1) Un bloque de 250 g descansa sobre una superficie horizontal. Se tira de él con una fuerza horizontal F progresivamente creciente, iniciándose el movimiento cuando F = 1.2 N. a) Cuál es el coeficiente de rozamiento estático. b) Si en lugar de tirar del bloque inclinamos el plano sobre el que está situado el bloque, ¿cuál sería el ángulo de inclinación del plano al que la masa empezaría a deslizarse?. 7.3 (2) Un bloque de 4 N de peso descansa sobre un plano horizontal. El coeficiente de rozamiento estático entre ambas superficies es µs = 0.4 y el cinético µk = 0.35. Determinar la fuerza de rozamiento que opone el plano al bloque cuando se aplica a éste: a) Una fuerza horizontal de 1 N. b) Una fuerza horizontal de 3 N. c) Una fuerza de 3 N inclinada 45º sobre la horizontal. 7.4 8 .- El giroscopio Objeto: Estudiar el movimiento de precesión del giroscopio. Utilización del estroboscopio. Material: Giroscopio Magnus con sus accesorios. Cronómetro. Estroboscopio. Fundamento: El giroscopio Entendemos por giroscopio una peonza simétrica montada sobre anillas en suspensión Cardan de modo que el eje de simetría esté exento de ligaduras, mientras que el centro de masa permanece estacionario. En la Figura 8-1 se muestra vertical esquemáticamente un giroscopio tipo, de z los dedicados a la enseñanza. El momento y volante de inercia del volante es grande por llevar en su periferia una llanta de plomo. El A B centro de masa del volante coincide con el punto de intersección de los ejes xyz, de anilla x modo que el peso del volante queda compensado por las fuerzas de reacción en peso los apoyos, cualquiera que sea la horquilla orientación del eje del volante en el soporte espacio. Obsérvese que el referencial xyz no se mueve solidariamente con el giroscopio, sino que se mueve solidariamente con la anilla. Los ejes xyz se mantienen siempre perpendiculares entre sí, pero pueden orientarse de Figura 8-1 cualquier forma respecto a los ejes inerciales (no representados en la Figura 8-1), lo que se comprende fácilmente observando las distintas articulaciones de la suspensión. Los rozamientos son muy pequeños (debido al empleo de rodamientos a bolas) de modo que imprimiendo un rápido movimiento de rotación al volante el movimiento se mantiene durante largo tiempo. El giroscopio de Magnus, representado en la Figura 8-2, se pone en rápida rotación mediante una manivela acoplable al eje del volante y dispone de Figura 8-2 8-1 numerosos accesorios para ilustrar el funcionamiento y las diversas aplicaciones del giroscopio. Cuando el volante está girando alrededor de su eje de simetría, puesto que no existe ningún par gravitatorio neto con respecto a su centro de masa, el momento angular se mantiene constante. Esto es, el eje de rotación (eje x, en el Figura 8-1) mantiene una dirección constante en el espacio. Por tanto, el giroscopio puede utilizarse como estabilizador de dirección, ya que proporciona una dirección de referencia independiente de la del vehículo que lo transporte. Si desplazamos el giroscopio en el laboratorio observaremos que el eje de rotación x señala siempre la misma dirección. El eje de rotación presenta una gran estabilidad, cosa que podemos poner de manifiesto comprobando que su dirección no se modifica sensiblemente al golpear la anilla o la horquilla o al girar el soporte. Si el momento aplicado al giroscopio no es nulo, el momento angular no se mantendrá constante (y tampoco el eje de rotación x). Durante un tiempo infinitesimal dt el cambio en el momento angular viene dado por dL = M dt (8.1) de modo que dL tiene la misma dirección del momento M aplicado. Si el momento es perpendicular al momento angular, el cambio dL es también perpendicular a L, y el momento angular cambiará de dirección pero no de magnitud. El resultado es la precesión del momento angular alrededor de una dirección fija en el espacio. Ω Así, si cuando el volante se encuentra en rápida rotación colgamos un peso P del ganchito de la anilla, a primera vista parece que el eje de rotación debería inclinarse hacia el lado donde está el peso, sin embargo no ocurre así, sino que el giroscopio (horquilla, anilla y volante) empieza a girar lenta y uniformemente en torno al eje fijo vertical z, manteniéndose el eje de rotación x en un plano horizontal. z M y L+dL L dL x dθ Para comprender lo anterior, hay que tener en cuenta que el momento aplicado, Figura 8-3 i.e., el momento del peso P con respecto al centro de masa del volante tiene la dirección del eje y, por lo que es M ⊥ L, como se ilustra en la Figura 8-3, y por tanto, el cambio dL en el momento angular, durante un tiempo dt es perpendicular a L. En consecuencia, el momento angular mantiene constante su módulo y precesa alrededor del eje fijo vertical con una velocidad angular de precesión Ω. En estas condiciones, la derivada temporal del momento angular, i.e., el momento aplicado, se puede expresar en la forma M = dL = Ω× L dt (8.2) y el módulo del momento aplicado es M =Ω L de donde 8-2 (8.3) Ω= M M = L Iω (8.4) siendo I el momento de inercia del volante con respecto a su eje de rotación y ω la velocidad angular del volante. La expresión anterior pone de manifiesto que cuanto mayor sea la velocidad angular de rotación del volante, menor será la velocidad angular de precesión. De igual modo, se puede comprobar que si se suprime la pesa P, y estando el volante en rápida rotación se coge la horquilla con las manos y se hace girar en el sentido de x a y, entonces el eje de rotación se va levantando, girando en torno al eje y, hasta ponerse vertical. Examinando los resultados anteriores, podemos llegar a la siguiente conclusión: La dirección del momento angular del giroscopio tiende a coincidir con la del momento externo aplicado; para ello el eje del volante se desvía perpendicularmente a las fuerzas que aplicamos. Foucault estableció el principio en que se M 3 basa la brújula giroscópica. Supongamos un giroscopio en el que el eje del volante está obligado a mantenerse en un plano horizontal ω 2 (esto se puede conseguir en el giroscopio de la W N Figura 8-1 suprimiendo la rotación al eje y). Supongamos que inicialmente el eje del E giroscopio señala la dirección Este-Oeste. S Conforme la Tierra gira, el plano horizontal y la N dirección Este-Oeste giran de la misma manera. El eje del giroscopio tendería a girar como indica S la flecha 2 (Figura 8-4), lo que equivale a aplicar un momento en la dirección Sur-Norte. Por lo 1 tanto, el eje del giroscopio, bajo la acción de ese momento, girará alrededor de la vertical del lugar (como indica la flecha 3) hasta señalar la Figura 8-4 dirección Norte. La brújula giroscópica presenta la ventaja sobre la brújula magnética de señalar la dirección del Norte geográfico, que no coincide con el Norte magnético, y de no estar sujeta a las anomalías magnéticas locales. El estroboscopio El estroboscopio es un instrumento que permite visualizar un objeto que está girando como si estuviera parado o girando muy lentamente. En esencia un estroboscopio está dotado de una lámpara, normalmente del tipo de descarga gaseosa de xenon similar a las empleadas en los flashes de fotografía, con la diferencia de que en lugar de un destello, emite una serie de ellos consecutivos y con una frecuencia regulable. 8-3 Si tenemos un objeto que está girando a N revoluciones por minuto y regulamos la frecuencia del estroboscopio a N destellos por minuto e iluminamos con él el objeto giratorio éste, al ser iluminado siempre en la misma posición, aparecerá a nuestros ojos como parado. Si la frecuencia de los destellos no coincide exactamente con la de giro, pero se aproxima mucho a ella, veremos el objeto moverse lentamente, hacia adelante o hacia atrás según que la frecuencia de destello del estroboscopio sea, respectivamente, inferior o superior a la de giro. El estroboscopio se utiliza para verificar la velocidad de giro de máquinas y motores de diversas clases, sin necesidad de efectuar acoplamiento eléctrico o mecánico alguno. Método: (i) Con el volante sin rotación, observar los movimientos que permite la suspensión Cardan. Comprobar que el volante está bien equilibrado, lo que permitirá orientar su eje en cualquier dirección del espacio. (ii) Comunicar al giroscopio una rápida rotación mediante el dispositivo previsto para ello (manivela). (iii) Obsérvese la estabilidad del movimiento cuando desplazamos el giroscopio, sujeto por su base, por el laboratorio. Obsérvese la constancia del momento angular. (iv) Con el volante en rotación, intentar orientar su eje en cualquier dirección del espacio, como en el primer apartado. Observar y explicar lo que ocurre. (v) Con el volante en rotación, añadir una pesa en el extremo del eje de rotación del volante, como se indica en la Figura 8-1. Observar y explicar el movimiento de precesión. (vi) Medir las velocidades angulares de rotación del volante (ω) y de precesión (Ω). Medida de ω.- Se medirá con el estroboscopio, fijando la marca de color que tiene el volante. Para ello, hay que hacer coincidir la frecuencia de rotación del volante con la de los destellos del estroboscopio. Hay que asegurarse que el movimiento del volante queda “congelado” para la frecuencia más baja posible. Medida de Ω.- Con el cronómetro, se medirá en tiempo empleado en 5 vueltas en el movimiento de rotación. (vii) Repetir las medidas varias veces para diferentes velocidades angulares de rotación. Representar gráficamente los valores de Ω versus los de 1/ω. Ajustar una recta a los puntos experimentales. (viii) Eliminar la rotación alrededor del eje y, mediante el dispositivo previsto para ello (muelles tensados) y observar que el momento angular del volante se orienta en la dirección Norte (brújula giroscópica). Resultados: El alumno presentará un breve resumen de las experiencias realizadas con el giroscopio. 8-4 Cuestiones: (1) Explicar porque no se inclina el eje de rotación del giroscopio cuando colgamos una pesa en uno de sus extremos. (2) Explicar en que consiste el movimiento de precesión. (3) ¿Qué operación hay que efectuar sobre el giroscopio de Magnus para que se comporte como una brújula? Respuestas: 8-5 9 .- Determinación de la aceleración de la gravedad Objeto: La determinación del valor de la aceleración de la gravedad. Material: Péndulo de Kater con dos masas 1000 y 1400 g. Sistema formado por fotocélula reflexiva, autómata programado y reloj, para la medida del período de oscilación. Fundamento: Unas de las magnitudes físicas que con mayor frecuencia se presentan en la resolución de problemas de todo tipo es la aceleración de la gravedad. De ahí que su determinación tenga una gran importancia, tanto desde el punto de vista teórico, como práctico. El valor medido de la aceleración de la gravedad no es constante de un lugar a otro de la Tierra, depende de la latitud del lugar y de la altura sobre el nivel del mar. Los valores extremos son: • 9.78 m/s2, medido en el ecuador y al nivel del mar. • 9.83 m/s2, en los polos. Esta variación de un lugar a otro de la Tierra se debe a que la gravedad es la composición de dos aceleraciones...., la aceleración debida a la fuerza gravitacional terrestre, y la aceleración debida al movimiento de rotación diurno terrestre (aceleración centrífuga). En general, se toma un valor medio para g cuando no se requiere una gran precisión en los resultados. Este valor medio estándar es: g = 9.81 m/s2 La determinación del valor de g por medida directa, mediante la observación de un cuerpo en caída libre en el vacío es difícil debido a que el tiempo de caída a lo largo de una distancia razonable es demasiado corto para medidas sencillas. Por ello hay que recurrir a métodos indirectos, como es la utilización de un péndulo. En esta práctica, se determinará el valor de la gravedad utilizando el péndulo físico de Kater. Péndulo físico.- Se puede considerar un péndulo físico cualquier cuerpo rígido situado de manera que pueda oscilar en un plano vertical, en torno a un eje que pase por algún punto del cuerpo diferente del centro de masas. La posición del péndulo físico queda determinada, en cualquier instante, por el ángulo θ que forma el plano determinado por el eje de rotación (O) y el centro de gravedad (G) del péndulo con el plano vertical que pasa por el eje de rotación. Se llamará h a la distancia del centro de gravedad (G) del péndulo al eje de rotación (O). Cuando el péndulo está desviado de su posición de equilibrio (estable) un ángulo θ (Figura 9-1), actúan sobre él dos fuerzas el peso y la reacción en el eje cuyo momento resultante con respecto al eje de rotación es un vector dirigido a lo largo del eje de rotación, en el sentido negativo del mismo; i.e. 9-1 M e = −mgh sen θ (9.1) Si I0 es el momento de inercia del péndulo respecto al eje de suspensión (O) y llamando θ a la aceleración angular del mismo, el teorema del momento cinético, o momento angular permite escribir la ecuación diferencial del movimiento de rotación del péndulo: −mgh sen θ = I 0 θ (9.2) que se puede escribir de la siguiente forma, como ecuación diferencial de segundo orden: mgh θ + sen θ = 0 I0 N O θ h G mg λ (9.3) h' O’ En el caso de que la amplitud angular de las oscilaciones sea pequeña, se puede usar la aproximación sen θ ≈ θ y la ecuación (9.3) adopta la forma Figura 9-1 θ + o sea θ + ω 2θ = 0 mgh θ =0 I0 con ω2 = (9.4) mgh I0 (9.5) que, como se sabe, corresponde a un movimiento armónico simple. El período de las oscilaciones es I0 mgh T = 2π (9.6) Siempre es posible encontrar un péndulo simple cuyo período sea igual al de un péndulo físico dado; tal péndulo simple recibe el nombre de péndulo simple equivalente y su longitud λ recibe el nombre de longitud reducida del péndulo físico. Utilizando la expresión del período del péndulo simple de longitud λ, se puede escribir T = 2π y, por lo tanto, se tiene que λ I0 = 2π mgh g λ= I0 mh (9.7) (9.8) Así, en lo que concierne al período de las oscilaciones de un péndulo físico, la masa del péndulo puede imaginarse concentrada en un punto (O’) cuya distancia al eje de suspensión es λ. Tal como recibe el nombre de centro de oscilación. Todos los péndulos físicos que tengan la misma longitud reducida λ (respecto al eje de suspensión) oscilarán con la misma frecuencia, la frecuencia del péndulo simple equivalente, de longitud λ. Es conveniente sustituir en la expresión (9.7) el valor del momento de inercia I0 del péndulo respecto al eje de suspensión (O) por el momento de inercia IG del cuerpo 9-2 respecto a un eje paralelo al anterior que pase por el centro de gravedad (G). Así, usando el teorema de Steiner, y llamando K al radio de giro del cuerpo a este último eje, se puede escribir I 0 = I G + mh 2 = mK 2 + mh 2 = m (h 2 + K 2 ) (9.9) de modo que la expresión (9.7) se transforma en h2 + K 2 T = 2π gh (9.10) En la Figura 9-2 se ha representado gráficamente la función T(h). Se obtiene una curva con dos ramas, que corresponden a colocar el eje de suspensión a un lado u otro del centro de gravedad del cuerpo. Como ambas ramas son simétricas respecto al eje vertical, en la práctica bastará con hacer T observaciones a un solo lado del c.d.g. Como queda bien manifiesto en la representación gráfica de la función T(h) dada por (9.10), el período de las oscilaciones presenta un valor mínimo para un cierto valor de la distancia h existente entre el centro de gravedad y el eje de suspensión. A partir de la expresión (9.10) λ λ es fácil demostrar que el valor mínimo del período se presenta cuando h = K, esto es, K’ O’G Q’ K h Q O cuando la distancia entre el c.d.g. y el eje de suspensión coincide con el radio de giro respecto a un eje que pasa por el c.d.g. Figura 9-2 La gráfica de la Figura 9-2 también pone de manifiesto que para un valor del período T > Tmin existen cuatro puntos (O,O’,Q,Q’) tales que al hacer pasar por ellos el eje de suspensión (en direcciones paralelas entre sí) las oscilaciones del péndulo físico tendrán el mismo período. De la simetría de la gráfica de la Figura 9-2 se deduce que los puntos O y Q, son equidistantes del centro de gravedad del cuerpo, y que lo mismo ocurre para los puntos O’ y Q’. Además, dado que la distancia que separa los puntos O u O’, estos es, OO’ = λ, es la misma que separa los puntos Q y Q’ (QQ’ = λ), se dice que los puntos O y O’ son conjugados entre sí, a igual que los puntos Q y Q’. A continuación se verá a qué obedece tal denominación. Cuando el péndulo oscila alrededor de un eje horizontal que pasa por el punto O, dicho punto recibe el nombre de centro de suspensión, y el punto O’, que se encuentra a una distancia λ del punto O, recibe el nombre de centro de oscilación. Si ahora se hace pasar el eje de suspensión por el punto O’, de modo que sea paralelo al anterior eje de suspensión, el punto O’ pasa a ser el punto de suspensión, en tanto que el punto O pasa a ser el centro de oscilación. Ambos puntos han permutado entre sí sus papeles; por eso se dice que son conjugados. Lo mismo se puede decir para los puntos Q y Q’. Los resultados anteriores constituyen el llamado TEOREMA DE HUYGENS (1629-1695), que se puede enunciar en la forma siguiente: La longitud reducida de un péndulo físico no varía cuando el centro de oscilación O’ pasa a ser centro de suspensión (O), pues ambos puntos 9-3 permutan entre sí sus papeles. El período del péndulo será el mismo en ambos casos. Esta propiedad se aprovecha para la construcción del llamado péndulo reversible de Kater, instrumento que permite medir el valor de la aceleración gravitatoria con gran precisión. Péndulo de Kater.- El péndulo de Kater es un péndulo compuesto que está formado por una barra metálica rígida provista de dos cuchillas (O y O’) con sus bordes enfrentados, como se indica en la Figura 9-3. Las cuchillas, apoyadas por sus bordes sobre un soporte rígido y robusto, sirven como centros (ejes) de suspensión. Dos discos metálicos (A y B) pueden desplazarse a lo A largo de la barra del péndulo. El disco de menor masa (A) está situado en uno de los extremos de la barra, fuera de las cuchillas, el O otro (B), más pesado, está colocado entre las cuchillas. h G h' B O’ λ Ajustando convenientemente las posiciones de las masas deslizantes sobre la barra del péndulo, puede conseguirse que sean iguales los períodos de oscilación del péndulo cuando está suspendido de la cuchilla O o de la cuchilla O’; en estas condiciones, los puntos O y O’ son conjugados y la distancia que los separa es la longitud reducida λ del péndulo. En consecuencia, se puede determinar el valor de la intensidad del campo gravitatorio, g, a partir de la expresión (9.7). Medida de g. Método de Bessel.- Bessel demostró que, para la determinación exacta del valor de g no es necesario el lento Figura 9-3 proceso que nos llevaría a conseguir que los dos períodos de oscilación, T y T’, sean exactamente iguales. Es suficiente que sean aproximadamente iguales, i.e., que la diferencia T-T’ sea muy pequeña, ya que entonces, de (9.10), podemos obtener: ghT 2 = h2 + K 2 4π 2 gh 'T ' 2 = h '2 + K 2 4π 2 (9.11) de modo que, restando miembro a miembro, tenemos: 4π 2 hT 2 − h 'T ' 2 T 2 + T ' 2 T 2 − T ' 2 = = + g h 2 − h '2 2(h − h ') 2(h − h ') (9.12) Entonces, si el centro de gravedad (G) del péndulo se encuentra más cerca de una cuchilla que de la otra, la diferencia (h-h’) no es pequeña y, puesto que T es aproximadamente igual a T’, el segundo término de la expresión anterior será despreciable en comparación con el primero, por lo que el valor de g puede obtenerse mediante la fórmula: g = 8π 2 h + h' T 2 + T '2 9-4 (9.13) Método: (i) La distancia λ = h + h’ entre las dos cuchillas de apoyo O y O’ es λ = 0.9939m. (ii) Manteniendo la pesa de 1400 g en la posición fijada, colocar la pesa de 1000 g en la posición 1 marcada.. (iii) Suspender el péndulo de una de sus cuchillas (O) y determinar el período de sus oscilaciones a partir de la medida de 10 oscilaciones. (iv) Suspender el péndulo de la otra cuchilla (O’) , y volver a determinar el período de sus oscilaciones. (v) Representar en la Gráfica 1 los períodos obtenidos en los dos puntos anteriores, en color diferente para los períodos correspondientes a cada cuchilla. (vi) Repetir los procesos (iii), (iv) y (v) en cada una de las posiciones marcadas para la masa de 1000 g. (vii) Ajustar a una curva los puntos correspondientes a los períodos de oscilación respecto a la cuchilla O, representados en la Gráfica 1. Ídem para los puntos correspondientes a los períodos de oscilación respecto a la cuchilla O’. (viii) Colocar las pesa de 1000 g en la posición aproximada correspondiente al punto de corte de las dos curvas representadas en la gráfica. Medir los períodos de oscilación del péndulo sujeto en ambas cuchillas y comprobar que dichos períodos son iguales (o casi). (ix) Calcular el valor de la aceleración de la gravedad en el lugar de la experiencia a partir de la expresión(9.7) y (9.13). 9-5 Resultados: Período (s) 2.040 2.030 2.020 2.010 2.000 1.990 1.980 1.970 1.960 1 2 4 3 5 Gráfica 1. Período de las oscilaciones para distintas posiciones de la pesa de 1000 g λ= T= T’ = Cálculo de g: A partir de (9.7): A partir de (9.13): 9-6 6 Posición pesa 1000 g Cuestiones: a) Definir el concepto de radio de giro. b) Demostrar que el valor mínimo de la función T=f(h) se presenta cuando h = K. c) ¿Qué se entiende por longitud reducida del péndulo físico? d) ¿Qué interés práctico presenta el péndulo de Kater? Respuestas: 9-7