Reconstrucción 3D
Anuncio

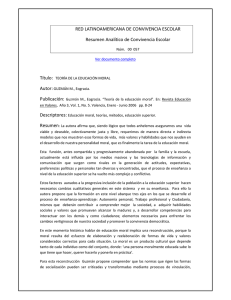
Reconstrucción 3D MoBiVAP Research Group c 2013 MoBiVAP Research Group Copyright P UBLISHED BY M O B I VAP WWW. MOBIVAP. UVA . ES Licensed under the Creative Commons Attribution-NonCommercial 3.0 Unported License (the “License”). You may not use this file except in compliance with the License. You may obtain a copy of the License at http://creativecommons.org/licenses/by-nc/3.0. Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an “AS IS” BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License. First printing, July 2013 Contents 1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 1.1 Problemática y justificación 15 1.2 Aplicaciones 15 Prefacio El módulo 2 del CEViC está enfocado hacia la Reconstrucción 3D a partir de varias vistas. En una primera aproximación, la Reconstrucción 3D es el proceso por el cual se recupera la forma y las apariencias de un objeto tridimensional Bα o de una escena volumétrica E mediante el análisis de la información digital proporcionada por diferentes tipos de sensores. Los sensores pueden ser pasivos (no interactúan con el objeto, como los diferentes tipos de cámaras basadas en la luz del espectro visible) o activos (la interacción procede de una respuesta del objeto en forma de onda reflejada que es capturada por el dispositivo). Este módulo 2 está centrado sobre todo en la información proporcionada por sensores pasivos (cámaras convencionales), relegando el uso de sensores activos al módulo 5 (en relación con la Reconstrucción Activa, incluyendo el caso móvil) y el Curso de Fotogrametría impartido por el Laboratorio de Fotogrametría Arquitectónica en el Máster de la SEAV (Sociedad Española de Arqueología y Patrimonio Virtual). Figure 1: Ortofoto obtenida a partir de Reconstrucción 3D del patio interior del Palacio Santa Cruz de la Universidad de Valladolid La Reconstrucción 3D a partir de imágenes es un tópico ha recibido una atención intensiva 6 desde finales de los ochenta y sobre todo a lo largo de los noventa que culmina en el libro de R. Hartley y A. Zisserman (2000). Este trabajo (citado en lo sucesivo como [Har00], a pesar de reediciones posteriores) proporciona un marco geométrico común que facilita la comprensión y el intercambio de información presentes en la pléyade de aproximaciones y resultados parciales existentes en la época. El carácter exhaustivo y la excelente organización de materiales contenidos en [Har00] hace difícil realizar aportaciones significativas en un curso de carácter introductorio como el actual. Por ello, además de glosar algunos resultados contenidos en dicho libro, el propósito adicional de este módulo 2 del CEViC es llamar la atención sobre aspectos presentados más recientemente que prolongan los modelos y herramientas desarrolladas para la Reconstrucción presentados en [Har00]. Estos modelos y herramientas están relacionadas con aplicaciones vinculadas a • el modelado avanzado 3D incluyendo virtualización de escenarios virtuales o aumentados; algunos de estos tópicos se desarrollan de forma más detallada en el Curso de la Sociedad Española de Arqueología y Patrimonio Virtual (SEAV); • la renderización basada en imagen o en vídeo incluyendo efectos vinculados a la iluminación y que se desarrolla de forma más detallada en el curso sobre renderizado y simulación • las relaciones con otros módulos del CEViC. Entre estas últimas cabe destacar las conexiones con los módulos dedicados al – el movimiento con especial atención a la reconstrucción a partir de video (Structure/Shape from Motion); – el reconocimiento de objetos y escenas, como base para una realimentación entre reconstrucción y reconocimiento en relación asimismo con interacción avanzada; – la Visión Estéreo como Reconstrucción dinámica de objetos en movimiento (sobre todo personajes) orientado hacia la simplificación en tareas de post-producción digital. Figure 2: Reconstrucción 3D de la fachada barroca de la Universidad de Valladolid Los aspectos mencionados ponen de manifiesto que, a pesar del espléndido trabajo realizado en [Har00], la Reconstrucción 3D está lejos de ser un área cerrada para la I+D+i. En particular, la demanda creciente del sector de producción de contenidos digitales en áreas de documentación 7 o bien de ocio y entretenimiento es una fuente permanente de inspiración para el desarrollo de métodos y herramientas vinculados de una u otra forma a la Reconstrucción 3D. En estas notas se desarrolla el módulo 2 que esta enfocado hacia la Reconstrucción 3D y está organizado de acuerdo con el siguiente esquema: 1. Conceptos básicos. Modelos de perspectiva. Estimación de elementos estructurales. 2. Calibración de cámaras. Reconstrucción euclídea 3. Geometría epipolar. Reconstrucción a partir de 2 vistas. 4. Reconstrucción a partir de múltiples vistas. 5. Reconstrucción a partir de una sola vista. Movimientos rígidos. 6. Reconstrucción a partir de vídeo (Structure From Motion) En los apartados siguientes presentamos algunos detalles relativos a materiales, estrategias y aplicaciones de la Reconstrucción 3D. Para llevar a cabo las seis tareas mencionadas más arriba es necesario construir una colección de datos significativos para la reconstrucción a partir de (una extensión de) las herramientas de Procesamiento y Análisis presentadas en el módulo 1. Sin embargo, una diferencia importante en relación con el enfoque precedente radica en la utilización de primitivas geométricas de dimensión ≥ 1: • en el caso lineal a trozos (PL: Piecewise Linear) las primitivas básicas son puntos p, líneas `, planos π, etc verificando condiciones de incidencia del tipo p ∈ ` ⊂ π ⊂ . . .; • en el caso curvado suave a trozos (PS: Piecewise Smooth) las primitivas básicas son puntos p, curvas C, superficies S, etc verificando condiciones de incidencia del tipo p ∈ C ⊂ S ⊂ . . .. Toda la información capturada es discreta y está contenida en imágenes digitales; por ello, todos los elementos geométricos se generan a partir de ”trozos” de primitivas geométricas básicas construidas mediante herramientas de Análisis de Imagen. Obviamente, en una imagen la dimensión máxima corresponde a regiones rα ; por ello, los datos volumétricos relativos a regiones Rα en el espacio o las superficies que las acotan deben ser inferidas a partir de modelos y construidas de forma explícita. Una diferencia importante con respecto al enfoque presentado en el módulo 1 radica en la diferente concepción de la imagen. Para cuestiones de Procesamiento y Análisis, una imagen es un mapa de bits y por ello predomina el enfoque analítico para el modelado; sin embargo, para cuestiones de Reconstrucción, una imagen es el resultado de una proyección de una porción del espacio sobre un plano y por ello predomina el enfoque geométrico (Geometría Proyectiva para objetos rígidos o Geometría Diferencial para objetos deformables). Obviamente, en ambos casos es necesario estimar todos los datos, lo cual da entrada diferentes técnicas de estimación vinculadas al Análisis o la Geometría. El diseño e implementación de los algoritmos correspondientes es una componente crucial para garantizar la eficiencia computacional de las soluciones propuestas. El objetivo de la Reconstrucción 3D es la generación de nuevas vistas y el modelado tridimensional de objetos Bα o de escenas E a partir de la información (analógica o digital) proporcionada por cámaras pasivas o bien de sensores de rango (infrarrojos, láser, rádar, LIDAR, rayos X, etc). La captura de los datos condiciona a menudo el tipo de modelado o de representación. Así, p.e. la percepción visual contenida en fotografías es continua y ello sugiere la utilización de modelos continuos, aunque el procesamiento de la información digital contenida en fotos dé lugar a toda clase de discontinuidades. Por el contrario, los inputs asociados los sensores de rango son discretos, por lo que la primera tarea del modelado para la Reconstrucción 3D 8 consiste en superponer modelos continuos a partir de nubes de puntos (con una densidad y una distribución muy variables); los modelos continuos. La posibilidad de generar en tiempo real una reconstrucción 3D a partir de varias vistas está dando lugar a una demanda creciente de aplicaciones de altas prestaciones relacionadas con la navegación automática en entornos parcialmente estructurados, la realidad virtual o aumentada, el desarrollo de herramientas de visualización avanzada que incluyan la posibilidad de consulta o la generación de informes a partir de la interacción con objetos 3D. Las prestaciones más eficientes afectan a resultados muy precisos (reconstrucción interna de órganos en Medicina, p.e.) que requiere la calibración ce cámaras, la visualización avanzada (alta calidad para las imágenes generadas de forma sintética para la representación 3D de la escena) y a la interacción (capacidad de respuesta en presencia de una interacción con objetos reales o virtuales). Por ello, este área de la Visión Computacional se solapa con otras procedentes de la Fotogrametría, Informática Gráfica y Sistemas Expertos. Figure 3: Recreación del aspecto del Alcazarejo mediante Realidad Aumentada Si se atiende a los aspectos geométricos relativos a la escena, el problema fundamental es una fusión precisa y rápida de información 2D y 3D. La información 2D de cada vista se puede proyectar sobre una nube densa de puntos 3D procedente de la Reconstrucción convencional o bien de dispositivos de rango (incluyendo láser 3D). Diferentes aproximaciones a la reconstrucción Existe una gran diversidad de aproximaciones a la Reconstrucción 3D automática de un objeto o de una escena a partir de una o varias imágenes o bien a partir de una secuencia de vídeo. En la primera parte de este módulo se desarrolla una introducción básica orientada a mostrar algunas de las aproximaciones más habituales de carácter estático en diferentes marcos geométricos, con especial atención a las basadas en aspectos geométricos con respecto a un plano común de 9 referencia (de interés para la fotogrametría). El enfoque dinámico estuvo presente prácticamente desde el principio del desarrollo de la Reconstrucción 3D; en efecto, Tomasi y Kanade (199192) proporcionan los primeros desarrollos del enfoque dinámico asociado a una secuencia de vídeo para la Reconstrucción 3d correspondiente a una proyección ortográfica y que se abordan en el capítulo del módulo dedicado a SFM/sfm (Structure/shape from motion). El desarrollo de herramientas para recuperar la trayectoria de la cámara utilizando la ”consistencia global” (verdad del fondo) en una colección de vistas proporciona una realimentación entre S (Structure / Shape) y M (movimiento) de gran interés para multitud de aplicaciones, incluyendo simulación y animación que exceden los límites del Curso. La introducción de sensores activos de tipo óptico (basados en luz estructurada incluyendo dispositivos láser 3D) permite incorporar off-line una gran precisión sobre nubes de miles o millones de puntos, lo cual resuelve el problema de la densidad en la representación precisa de escenas. Utilizando esta información, es posible referenciar la localización (posición y orientación) de cámaras convencionales con respecto a un modelo preciso de la escena. Algunas de las líneas de investigación más recientes están orientadas hacia la fusión online de información procedente de imagen y de rango; en este último caso, la información de rango procede de dispositivos de escaneo láser de línea con direcciones prefijadas (horizontal y vertical, habitualmente). Esta fusión está siendo aplicada actualmente en Robótica donde originalmente (años ochenta y noventa) se utilizaron otros sensores activos de tipo infrarrojo o ultrasonidos, o bien sensores de tipo magnético (para dispositivos hápticos, p.e.). La integración de la información correspondiente a sensores pasivos y activos es un problema con un gran número de cuestiones por resolver. La necesidad más reciente de una interacción en tiempo real en entornos 3D semi-inmersivos requiere el desarrollo de modelos y herramientas que permitan empaquetar y gestionar la información en primitivas (geométricas o radiométricas) con objeto de simplificar la gestión de escenas complejas en relación con requerimientos cambiantes del usuario y con un relativamente bajo coste computacional. Para ello, se requieren técnicas de muestreo inteligente, generación de primitivas 3D a partir de bases de datos de mallas deformables 3D asociadas a un número ”suficiente” de puntos de control (correspondientes a la localización de la cámara virtual o a la interacción requerida) que sean seleccionables por el usuario. Un ejemplo elemental corresponde a los avatares de SecondLife de mediados de la primera década del siglo XXI, pero actualmente se dispone de soluciones para entornos realistas mucho más complejos y de personajes con una representación y una capacidad de respuesta mucho mayor. Las necesidades actuales van más allá y requieren la incorporación en tiempo real de propiedades radiométricas (color y texturas) sobre formas 3D, en presencia de malas condiciones de iluminación, teniendo en cuenta que la apariencia cambia con la navegación o la inspección visual de los objetos 3D reales o simulados. Actualmente, ello sólo es posible limitándose a un pequeño número de objetos para los cuales se dispone de modelos mallados deformables gracias a la existencia de ”buenas parametrizaciones” (por mallas cuadrangulares). La integración y gestión de esta información relativa a objetos sólidos (correspondientes a la escena) y deformables (agentes reales o virtuales que interactúan dentro de la escena 3D) plantea nuevos retos a los que estas notas pretenden contribuir, proporcionando un soporte desde el punto de vista del modelado físico-matemático y su implementación computacional. Una de las áreas en la que se están produciendo la integración de conocimientos procedentes de dichas áreas es el video 3D y sus aplicaciones a la TV digital 3D personalizada (navegable de forma individual por cada ”espectador”). La generación de modelos 3D interactivos consiste 10 en ofrecer un ”fondo volumétrico navegable” (extendiendo el tradicional background plano) que pueda funcionar como un soporte en el que los actores 3D puedan ser sumergidos y con los que pueda haber diferentes grados de interacción. Ello requiere una adquisición 3D (basada en diferentes dispositivos de captura de imagen y de rango), una visualización semi-inmersiva 3D (herramientas para la navegación y consulta en escenarios 3D) y una capacidad de respuesta interactiva con actores o personajes virtuales en la escena (extendiendo los avatares sencillos ya existentes en SecondLife o similares). Reconstrucción para el modelado 3D El modelado 3D es un área de gran demanda para multitud de aplicaciones CAD/CAM relacionadas con Arquitectura, Urbanismo, Diseño Industrial, Informática Gráfica, Renderización o Visualización, entre otras. El enfoque tradicional del modelado es de tipo interactivo. Además de su interés intrínseco, la Reconstrucción 3D aporta elementos para asistir el modelado 3D, automatizar algunos procesos y abaratar los costes de producción resultantes. Para ello, utiliza modelos y herramientas que permiten extraer características geométricas a partir de un procesamiento y análisis de imagen centrado en las primitivas geométricos. En esta sección se revisan algunas cuestiones generales relacionadas con diferentes formas de abordar el modelado que tienen interés para las áreas señaladas anteriormente. Para disponer de modelos robustos y mejorar la eficiencia computacional de los algoritmos es necesario un desarrollo de propiedades relativas a la visualización de los objetos que sea independiente de la posición del observador y, a poder ser, de las condiciones ambientales; la primera cuestión afecta al carácter invariante de la geometría con respecto a (grupos de) transformaciones; la segunda condición afecta a un control de la radiometría vinculado a operadores que afectan a diferentes condiciones de iluminación de objetos Bα o escenas E tridimensionales. En este módulo 2 se muestran conexiones con diferentes tipos de modelado geométrico (para objetos rígidos), radiométrico (para la respuesta de los materiales con respecto a la luz), óptico-geométrico (para un mejor control de las condiciones de iluminación) y topológico (relativo a objetos deformables). El modelado cinemático (de interés para la reconstrucción a partir del movimiento) se aborda en la última lección y se desarrolla con más detalle en el módulo 3 (movimiento). Para resolver algunos problemas de Reconstrucción de objetos complejos es necesario combinar varios tipos de modelado, aproximación que etiquetamos como modelado híbrido. Esta combinación incluye no sólo aspectos relativos a la estructura y las apariencias superficie, sino también a las componentes que forman parte de dichos objetos. La gestión de un objeto complejo eventualmente deformable en términos de sus componentes, es conveniente recurrir a representaciones simbólicas que se gestionan mediante grafos. Algunos problemas importantes de la Reconstrucción 3D Los datos que se toman como referencia pueden ser relativos a objetos rígidos o deformables Bα proyectados sobre las vistas, en la escena E o relativos a la percepción visual (diferentes tipos de cámara para el caso artificial). De acuerdo con esta distinción, algunos de los problemas más importantes de Visión Computacional que afectan a la Reconstrucción 3D aparecen asociados a la 11 1. Puesta en correspondencia: Identificar, comparar y pegar elementos homólogos en diferentes vistas procedentes de diferentes proyecciones de un escenario 3D. Un pegado coherente debe estimar y corregir de forma automática las distorsiones, para lo cual es necesario levar a cabo una ”calibración” de la cámara (estimación de parámetros). 2. Recuperación de la estructura 3D del objeto o la escena a partir de proyecciones: Estimación de las restricciones estructurales (matriz fundamental para el caso afín, matriz esencial para el caso euclídeo). 3. Reproyección: Generación de nuevas vistas que sean consistentes con las precedentes. Pegado de objetos curvados (contornos de regiones) a partir de sus proyecciones planares (siluetas). No existe una única estrategia para resolver estos problemas y en este módulo se describe una introducción a algunas de las más utilizadas. En este módulo se lleva a cabo una introducción a los aspectos básicos de algunas de las técnicas más utilizadas con especial atención al diseño de algoritmos; una referencia bastante más completa es [Har00]. Los algoritmos a diseñar e implementar dependen del tipo de requerimientos planteados: velocidad vs. precisión, dispersión vs. densidad, precisión vs. exactitud, etc. El diseño de algoritmos para la Reconstrucción 3D debe tener en cuenta diferentes aspectos. A la vista de la diversidad de problemas y estrategias de resolución no hay una estrategia única para el diseño e implementación de algoritmos. Por ello, frecuentemente se utiliza una aproximación híbrida que debe ajustarse dependiendo de diferentes factores tales como las características del problema, los inputs disponibles y el objeto/escena a reconstruir. Algunas de las estrategia más frecuentes para el diseño e implementación utilizan el modelado y resolución del problema óptico-geométrico, se vinculan el tipo de agregación, utilizan estrategias de optimización (con especial atención a problemas de pegado) o bien parten de un modelado y minimización del error. Contenido del módulo 2 Un marco geométrico para la reconstrucción En este capítulo se presentan los fundamentos geométricos y la jerarquía natural entre las diferentes geometrías que proporcionan un soporte para los diferentes procesos de Reconstrucción 3D basada en sensores pasivos. La jerarquía entre las diferentes aproximaciones al problema de la Reconstrucción 3D procede de una relación muy simple entre los ”grupos estructurales” correspondientes a las transformaciones asociados a cada una de las geometrías. Reconstrucción Euclídea y Calibración La recuperación de la información métrica se lleva a cabo clásicamente (Fotogrametría Terrestre) mediante la estimación de los parámetros de la cámara. Los 5 parámetros intrínsecos corresponden a las características ópticas del dispositivos utilizado; los 6 parámetros extrínsecos corresponden a la localización geométrica (posición y orientación) de la cámara. Los 11 = 5 + 6 parámetros proporcionan una interpretación métrica de la información asociada a la (3 × 4)matriz asociada a una proyección genérica que está determinada por 11 parámetros (doce salvo factor de escala). La reinterpretación de la matriz de calibración interna K de la cámara en términos proyectivos (invarianza de la cónica absoluta) permite conectar la Fotogrametría con el enfoque Proyectivo. 12 Figure 4: Transformaciones euclídeas, afines y proyectivas De este modo, el método clásico del ajuste de haces proporciona un soporte común para Fotogrametría (basada en pares Estéreo) y la Reconstrucción Proyectiva. Geometría Epipolar para dos vistas La Geometría Epipolar proporciona el modelo estructural que facilita la puesta en correspondencia entre pares de puntos homólogos (p, p0 ) pertenecientes a dos vistas con ”suficiente solapamiento”. La restricción epipolar es una relación bilineal entre puntos homólogos que permite reducir drásticamente el tipo de búsqueda automática entre elementos homólogos, incluyendo el caso no-calibrado. En este capítulo se presenta el modelo epipolar para los casos euclídeo y afín, y se muestra cómo generar nuevas vistas sintéticas utilizando dicha restricción. Esta aproximación resuelve el primer problema de la Reconstrucción 3D asociado a la síntesis de vistas, sin necesidad de obtener un verdadero modelo 3D. Asimismo, se revisan propiedades relacionadas con los diferentes tipos de estructura geométrica (euclídea, afín, proyectiva) y su relación para conectar diferentes modelos de perspectiva. Se muestra cómo es posible obtener información métrica en relación con ”elementos invariantes del infinito” (cónica absoluta) correspondientes a una complección del espacio ordinario en el espacio proyectivo P3 ; este tipo de resultados proporciona una conexión estructural entre los aspectos proyectivo y métrico de la Reconstrucción 3D. Reconstrucción a partir de múltiples vistas La incorporación de una tercera vista resuelve el problema de ambigüedad en la Reconstrucción 3D a partir de dos vistas. En este caso, la solución satisface una colección de restricciones trilineales que recibe el nombre de tensor trifocal. Estas restricciones representan condiciones de incidencia invariantes para puntos, líneas o una combinación de ambas. Actualmente, es posible llevar a cabo la Reconstrucción 3D a partir de un número arbitrario n de vistas que tengan algún tipo de solapamiento y sin información previa sobre la calibración de ninguna cámara. Ello permite incorporar información procedente de archivos históricos correspondientes a vistas antiguas para objetos o escenas que ya no existen. La resolución del problema requiere técnicas más avanzadas para la fusión de información (basadas en Programación Dinámica, p.e.) que extienden el enfoque clásico basado en el ajuste de haces presentado en el capítulo anterior. Este tipo de Reconstrucción plantea la cuestión de a partir de qué momento la incorporación 13 de nuevas vistas no añade información sustancial a la solución. La respuesta se conoce desde finales de los noventa y corresponde a 4 vistas. Por ello, el tensor cuadrifocal juega un papel fundamental en relación con la generación de nuevas vistas para la navegación de vehículos (robots inicialmente, automóviles ”inteligentes” más recientemente) equipados con un dispositivo estéreo o bien para retransmisiones en las que se cuenta con una cantidad elevada de cámaras (a menudo más de veinte). Ello justifica la atención especial que se dedica en este capítulo al tensor cuadrifocal. Reconstrucción 3D a partir de una sola vista La existencia de modelos de perspectiva en grabados antiguos o la detección de dichos modelos a partir de imágenes correspondientes a escenarios ya desaparecidos proporciona materiales para la recreación de escenarios arquitectónicos en el caso de una sola vista. El objetivo principal de este capítulo es la generación de un modelo volumétrico a partir de un modelo de perspectiva elaborado de acuerdo con las reglas de la Geometría Proyectiva. En este capítulo se presentan algunas aplicaciones correspondientes a escenarios arquitectónicos. Se discuten los diferentes modelos de perspectiva y las herramientas que proporcionan una estimación atendiendo a los diferentes requerimientos de rapidez (tiempo real) o precisión (incorporación de propiedades métricas salvo escala). Para minimizar las distorsiones en la visualización es conveniente evaluar la transformación de un rectángulo en un cuadrilátero mediante la estimación de una transformación afín (afinidad) o bien proyectiva (homografía). Reconstrucción a partir del movimiento La recuperación de la forma (shape) o de la estructura de una escena a partir de una secuencia de vídeo proporciona soporte a un tipo de reconstrucción activa (navegación controlada por el operador) con un sensor pasivo (cámara de vídeo). Las estrategias SFM (Structure from Mtion) y sfm (shape from motion) se basan en el seguimiento de trayectorias para una colección significativa de puntos (máximos de intensidad, esquinas); este método permite gestionar de forma más eficiente que otros los problemas relacionados con las autooclusiones y proporciona soporte para una gran cantidad de aplicaciones multimedia. En este capítulo se presentan las aproximaciones siguiendo un orden histórico con algunas de las motivaciones iniciales vinculadas objetos con marcas (trajes con sensores eventualmente activos) o a los desarrollos llevados a cabo por T.Kanade y sus colaboradores. Se incluyen las versiones métrica para el entorno más próximo y afín para rango intermedio. El primer paso consiste en estimar el movimiento propio de la cámara, entendido como una transformación rígida (composición de una rotación y una traslación) en el espacio ordinario. Se incorporan refinamientos posteriores utilizando diferentes tipos de restricciones estructurales (epipolar, trifocal, cuadrifocal) expuestas en capítulos anteriores. Las innovaciones más significativas con respecto a los materiales presentados anteriormente afectan a la incorporación de elementos robustos (movimiento de configuraciones de rectas en el espacio, según P. Sturm y A. Bartoli, inicialmente) o bien la utilización de grupos de transformaciones para gestionar la información de manera simultánea (Y.Ma et al). Modelado 3D basado en reconstrucción En este capítulo se presentan los diferentes tipos de modelado matemático 3D para objetos rígidos o bien libres de forma. Se discute la formulación más apropiada (paramétrica o implícita) dependiendo del tipo de objeto, así como las limitaciones del ajuste por polinomios de grado bajo. Ello plantea el problema del ”pegado” de datos locales que se resuelve introduciendo técnicas de optimización para una representación lineal de las superficies de grado bajo. 14 El enfoque adoptado está relacionado con la Reconstrucción 3D para objetos volumétricos curvados con una geometría complicada a partir de una sola vista; la distorsión se evalúa en términos de la deformación de una sección circular (forma elíptica) generada de forma artificial a partir de una sección plana (eventualmente variable) a lo largo de un perfil. Esta observación permite extender la reconstrucción 3D a partir de una sola vista a volúmenes más complejos que las escenas arquitectónicas, como las de actores virtuales de gran interés para aplicaciones multimedia. Se muestran aplicaciones para objetos rígidos; el caso correspondiente a objetos deformables se aborda en el módulo 5 del CEViC. Problemática y justificación Aplicaciones 1 — Introducción 1.1 Problemática y justificación 1.2 Aplicaciones