tesis juliana reyes - ing. automotriz
Anuncio

UNIVERSIDAD TECNOLÓGICA EQUINOCCIAL
FACULTAD DE CIENCIAS DE LA INGENIERÍA
CARRERA DE INGENIERÍA AUTOMOTRIZ
CONSTRUCCIÓN DE UNA MAQUETA DE UN MOTOR
MONOCILÍNDRICO PARA DEMOSTRACIÓN DE LA
CINEMÁTICA DEL MOTOR EN EL MECANISMO
BIELA – MANIVELA
TRABAJO PREVIO A LA OBTENCIÓN DEL TÍTULO DE
INGENIERA AUTOMOTRIZ
JULIANA ALEJANDRA REYES NIETO
DIRECTOR: ING. CÉSAR PADILLA
Quito, Enero 2015
© Universidad Tecnológica Equinoccial. 2015
Reservados todos los derechos de reproducción
DECLARACIÓN
Yo, JULIANA ALEJANDRA REYES NIETO, declaro que el trabajo aquí
descrito es de mi autoría; que no ha sido previamente presentado para
ningún grado o calificación profesional; y, que he consultado las referencias
bibliográficas que se incluyen en este documento.
La Universidad Tecnológica Equinoccial puede hacer uso de los derechos
correspondientes a este trabajo, según lo establecido por la Ley de
Propiedad Intelectual, por su Reglamento y por la normativa institucional
vigente.
_________________________
Juliana Alejandra Reyes Nieto
C.I. 172430244-1
CERTIFICACIÓN
Certifico que el presente trabajo que lleva por título “Construcción de una
Maqueta de un Motor Monocilíndrico para Demostración de la
Cinemática del Motor en el Mecanismo Biela-Manivela”, que, para aspirar
al título de Ingeniera Automotriz fue desarrollado por Juliana Alejandra
Reyes Nieto, bajo mi dirección y supervisión, en la Facultad de Ciencias de
la Ingeniería; y cumple con las condiciones requeridas por el reglamento de
Trabajos de Titulación artículos 18 y 25.
________________________
Ing. César Padilla
DIRECTOR DEL TRABAJO
C.I. 170049392-5
DEDICATORIA
“Nadie dijo que fuera fácil, pero
prometieron que valdría la pena”
Dedico este trabajo, con mucho cariño:
A mis padres, Edwin y Sonia, y a mis
hermanos, Renata y Estefano, quienes me
han brindado su amor y apoyo, y han
sido
mi
pilar
fundamental
y
mi
motivación para luchar por mis metas.
A todos quienes están conmigo, gracias
por confiar en mí y nunca dejarme sola
en este largo camino que es la vida.
Juliana Reyes Nieto
AGRADECIMIENTOS
Agradezco infinitamente:
A Dios, por darme la vida y la salud para lograr
alcanzar mis metas.
A
mis
padres,
por
su
ejemplo
y
apoyo
incondicional para hacer de mí lo que ahora soy. A
mis hermanos por darme la fuerza y motivación
para seguir siempre adelante.
A mi tía, a mi novio y a mis amigos y familia en
general, quienes estuvieron siempre alentándome y
recordándome que yo sí podía.
A mis maestros, quienes me brindaron sus
conocimientos para hacer de mí una excelente
profesional.
Al Ing. César Padilla, por su guía, ayuda, paciencia
y dedicación en cada etapa de este trabajo, gracias
por ser un gran maestro.
ÍNDICE DE CONTENIDOS
RESUMEN
xvii
ABSTRACT
xix
1. INTRODUCCIÓN
21
1.1.
PROBLEMA
22
1.2.
JUSTIFICACIÓN
22
1.3.
OBJETIVOS DEL PROYECTO
23
1.3.1.
OBJETIVO GENERAL
23
1.3.2.
OBJETIVOS ESPECÍFICOS
23
1.4.
ALCANCE
2. MARCO TEÓRICO
2.1.
MOTOR DE COMBUSTIÓN INTERNA
2.1.1.
25
26
SISTEMÁTICA DE LOS MOTORES DE COMBUSTIÓN
INTERNA
2.1.2.
24
28
CLASIFICACIÓN DE LOS MOTORES DE COMBUSTIÓN
INTERNA
30
2.2.
PARÁMETROS GEOMÉTRICOS DEL MOTOR
33
2.3.
CONCEPTOS BÁSICOS DE CINEMÁTICA
39
2.4.
CINEMÁTICA DE MÁQUINAS Y MECANISMOS
42
2.4.1.
MECANISMOS DE TRANSMISIÓN DE MOVIMIENTO
2.4.1.1.
Mecanismos de transmisión lineal
43
44
vii
2.4.1.2.
2.4.2.
Mecanismos de transmisión circular
46
MECANISMOS DE TRANSFORMACIÓN DE MOVIMIENTO 49
2.4.2.1.
Mecanismos de transformación circular en lineal
49
2.4.2.2.
Mecanismos de transformación circular en lineal alternativo
51
2.4.3.
2.5.
OTROS MECANISMOS DE INTERÉS
CINEMÁTICA DEL MECANISMO BIELA – MANIVELA
3. METODOLOGÍA
54
56
67
3.1.
CARACTERÍSTICAS TÉCNICAS DEL MOTOR
68
3.2.
SISTEMA MECÁNICO
69
3.2.1.
SELECCIÓN DE MATERIALES
69
3.2.2.
DISEÑO DE LA MAQUETA Y SUS MECANISMOS
71
3.2.3.
MECANISMO PARA LONGITUD DE BIELA VARIABLE
73
3.2.4.
ALTURA VARIABLE DEL CILINDRO
75
3.2.5.
MOVIMIENTO DEL CIGÜEÑAL
76
3.2.6.
DISCO DE ÁNGULO DE GIRO
77
3.2.7.
ESCALA DE DESPLAZAMIENTO
78
3.2.8.
BASE DE BANCADAS DE CIGÜEÑAL Y ESTRUCTURA DE LA
MAQUETA
79
3.2.9.
83
MONTAJE DEL SISTEMA MECÁNICO DE LA MAQUETA
3.2.9.1.
Unión de la estructura mediante suelda GMAW (MIG)
3.2.10. ACABADOS
3.2.10.1. Capa antioxidante
83
85
85
viii
3.3.
3.2.10.2. Pintura electrostática
86
SISTEMA ELECTRÓNICO
88
3.3.1.
SELECCIÓN DE ELEMENTOS A UTILIZAR
88
3.3.1.1.
Arduino Mega
89
3.3.1.2.
Pantalla gráfica TFT LCD 3.2"
90
3.3.1.3.
Panel touch
91
3.3.1.4.
Sensor de revoluciones
93
3.3.1.5.
Variador de revoluciones
94
3.3.2.
ARMADO DEL CIRCUITO
95
3.3.3.
PROGRAMACIÓN
97
3.4.
PRUEBAS DE FUNCIONOMIENTO
4. RESULTADOS
4.1.
MANUAL DE USO Y FUNCIONAMIENTO DE LA MAQUETA
98
103
104
4.1.1.
COMPONENTES DEL EQUIPO
104
4.1.2.
PRECAUCIONES Y SEGURIDADES
104
4.1.3.
ESQUEMA Y DESCRIPCIÓN DEL SISTEMA
105
4.1.4.
ENCENDIDO Y APAGADO
106
4.1.5.
MANEJO DEL PROGRAMA
107
4.1.6.
UTILIZACIÓN DE LA MAQUETA MEDIANTE
FUNCIONAMIENTO MANUAL
108
4.1.7.
109
4.3.
PRUEBAS DE TALLER
GUÍAS PARA PRÁCTICAS EN EL TALLER
110
ix
4.4.
ANÁLISIS DE RESULTADOS
117
4.4.1.
DESPLAZAMIENTO, VELOCIDAD Y ACELERACIÓN
117
4.4.2.
RELACIÓN BIELA – MANIVELA (FACTOR λ)
118
4.4.3.
CINEMÁTICA Y MECANISMO BIELA - MANIVELA
118
5. CONCLUSIONES Y RECOMENDACIONES
119
5.1.
CONCLUSIONES
120
5.3.
RECOMENDACIONES
122
ANEXOS
123
NOMENCLATURA
140
BIBLIOGRAFÍA
143
x
ÍNDICE DE TABLAS
Tabla 1. Sistemática de la máquina de combustión
30
Tabla 2. Ventajas e inconvenientes de los motores según la relación S/D 34
Tabla 3. Valores habituales para la relación carrera – diámetro
35
Tabla 4. Valores habituales para la relación de compresión
38
Tabla 5. Movimientos y mecanismos
55
Tabla 6. Pruebas realizadas en la maqueta
98
Tabla 7. Datos de posiciones (x) del pistón en función del ángulo girado por
el cigüeñal (α) medidos manualmente y comparados con los obtenidos
mediante software
100
Tabla 8. Datos de la maqueta a 200 rpm obtenidos por software
101
xi
ÍNDICE DE FIGURAS
Figura 1. Diagrama de entradas y salidas de un MCI
26
Figura 2. Ciclos Termodinámicos Otto y Diésel
27
Figura 3. Curvas características del motor
28
Figura 4. Fases de un motor de 4 tiempos
31
Figura 5. Motores refrigerados por líquido (A) y por aire (B)
32
Figura 6. Ciclos de pistón rotativo vs pistón alternativo
32
Figura 7. Disposición de los cilindros de un motor
33
Figura 8. Comparación entre cilindros de distinto S/D, con igual cilindrada y
relación de compresión volumétrica
35
Figura 9. Dimensiones: longitud de biela, radio de manivela
36
Figura 10. Dimensiones: área del pistón, volumen de la cámara de
combustión, cilindrada, relación de compresión
38
Figura 11. Movimiento uniforme y movimiento variado
40
Figura 12. Movimiento alternativo del pistón
41
Figura 13. Tipos de sistemas de poleas
44
Figura 14. Tipos de palancas
45
Figura 15. Transmisión por correas
47
Figura 16. Tipos de engranajes en función de la forma de sus dientes
48
Figura 17. Esquema del mecanismo piñón – cremallera
50
xii
Figura 18. Sistema de tornillo – tuerca utilizado en gatas mecánicas
51
Figura 19. Esquema del sistema biela – manivela
52
Figura 20. Esquema del cigüeñal
53
Figura 21. Funcionamiento de una excéntrica
53
Figura 22. Mecanismo leva – seguidor
54
Figura 23. Sistema biela – manivela
56
Figura 24. Descentramiento del eje del bulón
57
Figura 25. Esquema básico de biela – manivela
58
Figura 26. Diagrama de desplazamiento del pistón
61
Figura 27. Diagrama de la velocidad del pistón
64
Figura 28. Diagrama de la aceleración del pistón en función de los ángulos
de rotación de la manivela
66
Figura 29. Motor de Suzuki GN 125
68
Figura 30. Esquema de la maqueta (incluido el motor eléctrico)
72
Figura 31. Esquema del mecanismo de longitud variable de la biela
74
Figura 32. Perforaciones en las placas y la biela para variar su longitud
74
Figura 33. Mecanismo de longitud de biela variable
75
Figura 34. Ubicación de soportes para altura variable del cilindro y esquema
de las piezas de aumento
75
Figura 35. Motor eléctrico DC a 24v
77
Figura 36. Disco indicador de ángulo de giro
78
Figura 37. Escala de desplazamiento y corte del cilindro
78
Figura 38. Esquema de las placas para la estructura
79
xiii
Figura 39. Esquema de la estructura
80
Figura 40. Perforaciones a las placas de la estructura
80
Figura 41. Doblado de las placas
81
Figura 42. Bancada del cigüeñal
81
Figura 43. Portabocines con bocines y retenedores
82
Figura 44. Rectificación de la superficie de la bancada del cigüeñal
82
Figura 45. Machuelado del agujero para vaciar el cárter
83
Figura 46. Soldadura de la maqueta
84
Figura 47. Unión por soldadura MIG
84
Figura 48. Pintura electrostática aplicada en las piezas
87
Figura 49. Placa Arduino Mega
89
Figura 50. Display TFT GLCD 3.2”
90
Figura 51. Shield para TFT
91
Figura 52. Panel touch para GLCD 3.2”
92
Figura 53. Estructura interna del panel táctil
92
Figura 54. Sensor de encoder con optoacoplador
93
Figura 55. Disco de encoder
94
Figura 56. Mosfet variador de tensión
95
Figura 57. Circuito mosfet para variación de tensión
95
Figura 58. Circuito transformador y rectificador de tensión
96
Figura 59. Conexión de elementos a la placa Arduino
96
Figura 60. Maqueta terminada
99
xiv
Figura 61. Gráfica de desplazamiento obtenida por software
101
Figura 62. Gráfica de velocidad obtenida por software
102
Figura 63. Gráfica de aceleración obtenida por software
102
Figura 64. Esquema de la maqueta y sus partes
105
Figura 65. Descripción del proceso de funcionamiento
106
Figura 66. Pantalla de inicio
107
Figura 67. Botones variadores de rpm
108
xv
ÍNDICE DE ANEXOS
ANEXO 1
Plano general del banco de pruebas
124
ANEXO 2
Plano del mecanismo de longitud variable de biela
125
ANEXO 3
Plano de fabricación de las placas para la estructura
126
ANEXO 4
Plano del montaje de la estructura
127
ANEXO 5
Plano de fabricación de bocines, portabocines y retenedores
128
ANEXO 6
Programa en Arduino
129
ANEXO 7
Maqueta terminada (varias vistas)
138
ANEXO 8
Costos del proyecto
139
xvi
RESUMEN
En este proyecto se construyó una maqueta funcional utilizando un motor
monocilíndrico, mediante la cual se puede comprender la aplicación de
conceptos cinemáticos en los parámetros principales para el diseño de un
motor y la geometría de su mecanismo biela – manivela.
La maqueta fue realizada tras identificar la necesidad de aprendizaje y
comprensión de cinemática aplicada al motor y será utilizada posteriormente
en prácticas por los alumnos de la carrera de Ingeniería Automotriz de la
Universidad Tecnológica Equinoccial en Quito – Ecuador.
Se realizó el diseño y la selección del motor y los materiales en base al uso
que se le iba a dar a dicha maqueta. Al construir la parte mecánica, se
utilizaron procesos, máquinas y herramientas propios del área mecánica.
Para el corte de las placas se requirió de una cizalla, se necesitó una
dobladora para darles a ciertas piezas la forma requerida, al realizar las
perforaciones se utilizó el taladro de pedestal, en varios procesos se
necesitó también un torno y una fresadora; soldadura, protección
antioxidante y pintura fueron los procesos utilizados en este trabajo;
machuelos, tarraja y calibrador pie de rey son algunas de las herramientas
que fueron útiles al construir la maqueta.
En cuanto a la realización de la parte electrónica del proyecto, se aplicaron
los conocimientos de electrónica automotriz pero también se tuvieron que
ampliar conocimientos dentro del área de programación. El sensor óptico fue
elegido ya que es el de mejores características para la aplicación requerida;
el motor eléctrico que da movimiento al sistema es de corriente continua con
caja reductora y fue escogido debido a su facilidad de control; se optó por el
uso de la plataforma Arduino ya que es de software libre, de fácil manejo y
con amplias opciones de aplicación.
xvii
Se realizó además un manual de uso y funcionamiento de la maqueta, así
como también una guía de práctica útil para los estudiantes.
Al finalizar, se logró crear un sistema amigable con el usuario, fácil de
entender y manipular, con el cual se obtuvieron datos que comprueban las
teorías del funcionamiento de mecanismos en base a conceptos cinemáticos
y que ayudará a mejorar la capacidad de aprendizaje y comprensión en
temas de cinemática aplicada en el diseño, construcción y modificación del
motor, específicamente enfocados en el sistema biela – manivela.
xviii
ABSTRACT
In this project, a functional model was constructed using a single – cylinder
engine, through which one can understand the application of concepts in the
main kinematic parameters for the design of an engine and the geometry of
the rod – crank mechanism.
The model was made after identifying the need for learning and
understanding of kinematics applied to the motor and will be used later in
practices by the Automotive Engineering students of the Universidad
Tecnológica Equinoccial in Quito – Ecuador.
Design and motor and materials selection was performed based on the use
that is going to give to this model. In constructing the mechanical part,
processes, machines and tools own from the mechanical area were used.
For cutting plates has required a shear, a bending tool was needed to give
the required form to certain parts, pedestal drill was used to make the
perforations, in various processes were also needed a lathe and a milling
machine; welding, rust protection and paint were the processes that were
used in this work; taps, tapper threading and caliper are some of the tools
that were useful in constructing the model.
As for the realization of the electronic part of the project, knowledge of
automotive electronics was applied but also had to expand knowledge in the
area of programming. The optical sensor was selected because it has the
best features for the required application; the electric motor that gives motion
to the system operates with DC and has a gearbox, it was chosen because of
its ease in control; it was decided to use the Arduino platform because it is an
open source, easy to use and with extensive application options.
It was also developed a handbook of usage and operation of the model, as
well as a useful practice’s guide for students.
xix
At the end, it was possible to create a user-friendly system, easy to
understand and manipulate, with which were obtained data that proves the
theories of performance of mechanisms based on kinematic concepts and
which will help improve the learning and understanding capacity with regard
to kinematic themes applied in engine design, construction and modification,
specifically focused on the rod – crank system.
xx
1.
INTRODUCCIÓN
1.1. PROBLEMA
Variables que Causan el Problema:
Dificultad al comprender y aplicar cálculos cinemáticos del motor en la
parte práctica.
Falta de material didáctico en la carrera de Ingeniería Automotriz para
poder comprender y aplicar las enseñanzas teóricas relacionadas con la
cinemática en el mecanismo biela – manivela.
1.2. JUSTIFICACIÓN
La cinemática es una de las materias básicas en el aprendizaje del
funcionamiento de máquinas y mecanismos, sobre todo en motores de
combustión interna.
El análisis cinemático permite relacionar el desplazamiento lineal del pistón y
su velocidad con el giro del mecanismo biela - manivela; determinar las
aceleraciones del pistón y del cuerpo de la biela, lo cual es fundamental para
su dimensionado, y del pie de biela que, multiplicadas por la masa del pistón
y de la parte de biela que puede considerarse constituyente del pie, dan las
fuerzas alternativas que deberán tomarse en cuenta para el equilibrado
posterior.
Dentro del aprendizaje de temas que tienen que ver con cálculos en el
diseño y funcionamiento de los motores y sus mecanismos, muchas veces
es algo complejo comprender la aplicación de dichos temas en el campo
práctico.
22
Para solucionarlo, se propone la construcción de una maqueta didáctica, que
servirá para prácticas de taller, en la cual se pueda observar todos los
parámetros que tienen relación a la cinemática del motor, tales como
desplazamiento del pistón, giro del cigüeñal, velocidad y aceleración
alcanzadas por el pistón, relación entre la longitud de la biela y su manivela;
lo cual es la geometría o arquitectura del motor.
Con esto se podrá ver de forma práctica la aplicación de la teoría, y ayudará
a la explicación y comprensión de estos temas.
1.3. OBJETIVOS DEL PROYECTO
1.3.1. OBJETIVO GENERAL
Construir una maqueta de un motor monocilíndrico para la demostración de
la cinemática del motor en el mecanismo biela – manivela.
1.3.2. OBJETIVOS ESPECÍFICOS
1. Diseñar la estructura y seleccionar los materiales adecuados para la
realización de un banco de pruebas (maqueta) de un motor monocilíndrico
que ayude a comprender los parámetros cinemáticos del funcionamiento del
motor.
23
2. Armar la maqueta de un motor monocilíndrico que permita demostrar
didácticamente la aplicación práctica de los cálculos que se deben realizar al
diseñar el mecanismo biela-manivela.
3. Realizar pruebas de funcionamiento de la maqueta para calibrarla,
comprobar su correcta operación y su utilidad al obtener datos y gráficos de
la variación cinemática y geométrica de los componentes del mecanismo
biela-manivela.
4. Elaborar el manual de uso y funcionamiento de la maqueta y las guías de
prácticas correspondientes al equipo, para su correcta utilización en las
prácticas de taller.
1.4. ALCANCE
Esta maqueta sirve para fines educativos (realización de prácticas para
aplicar conocimientos teóricos sobre cinemática aplicada en la geometría del
motor) dentro de la Universidad Tecnológica Equinoccial en la Carrera de
Ingeniería Automotriz.
24
2.
MARCO TEÓRICO
2.1. MOTOR DE COMBUSTIÓN INTERNA
Un motor de combustión interna alternativo (MCIA) es una máquina térmica
que genera su potencia al transformar la energía química obtenida por la
violencia de la reacción química de un combustible en energía mecánica,
como se muestra en la figura 1.
Un MCIA necesita como entrada aire y combustible (energía química),
además del aporte de sistemas auxiliares necesarios para su funcionamiento
como son los sistemas de lubricación, refrigeración y eléctrico, y
mecanismos en el interior del motor como sistema de distribución y
mecanismos pistón-biela-manivela; como productos de salida final se
obtiene la energía mecánica utilizable, además de residuos o productos de la
ineficiencia como los gases de la combustión y calor cedido al medio.
Figura 1. Diagrama de entradas y salidas de un MCI
La obtención de la energía química ocurre por la combustión (HC + O2 à
CO2 + H2O + energía), la cual sucede en una cámara cerrada dentro de la
26
misma máquina. La conversión de esta energía térmica se realiza mediante
su transmisión a un medio de trabajo (motor) cuya presión aumenta y que
realiza el trabajo cuando finalmente se expande (Bosch GmbH, Robert,
2005). Este proceso se realiza mediante un ciclo termodinámico, en el cual
la energía interna del sistema no cambia y el calor transferido (obtenido
mediante la combustión) se convierte en trabajo realizado por el sistema. En
la figura 2 se observa cómo trabajan estos ciclos en relación al volumen y la
presión del sistema.
Figura 2. Ciclos Termodinámicos Otto y Diésel
Gracias al ciclo termodinámico y el trabajo en general que realiza el motor se
logra obtener ciertas características o propiedades, las cuales se pueden
observar en la figura 3:
Rendimiento (η).- Relaciona la potencia útil generada por el motor y la
potencia absorbida.
Régimen de giro ( ).- Es la velocidad angular del cigüeñal, es decir las
revoluciones por minuto (rpm) a las que gira.
27
Potencia (P).- Es el trabajo que el motor es capaz de realizar en la unidad de
tiempo a una determinada velocidad de giro; se mide generalmente en HP,
CV, KW o PS.
Par motor o torque (T).- Es el momento de rotación que actúa sobre el motor
y determina su giro; se mide en N.m.
Figura 3. Curvas características del motor
(Mecánica Virtual, 2013)
2.1.1. SISTEMÁTICA DE LOS MOTORES DE COMBUSTIÓN INTERNA
Una vez comprendido el funcionamiento de un motor, se debe conocer su
sistemática. La sistemática se refiere a la división de las diferentes máquinas
de combustión, de acuerdo a su funcionamiento y las características de su
proceso de trabajo.
28
Un motor de combustión interna (MCI) es aquel en el que el proceso de
combustión del hidrocarburo para obtener energía se produce dentro del
mismo; en este caso, el gas de combustión se utiliza directamente como
medio de trabajo.
Si la obtención de trabajo mecánico debe realizarse continuamente debe
existir
una
secuencia
cíclica
(motor
de
émbolos)
o
continuada
(turbomáquina) de absorción de calor, expansión (obtención de trabajo) y
retorno del medio de trabajo a su estado de partida (proceso cíclico).
Si el medio de trabajo se modifica durante la absorción de calor al usar una
parte de sus componentes, el retorno al estado de partida solo se logra
sustituyendo el medio de trabajo. En este caso se tiene un proceso abierto y
un intercambio de gas en el funcionamiento cíclico, lo cual es la expulsión
del gas de combustión y el suministro de una carga fresca.
Cuando la formación de la mezcla se realiza fuera de la cámara de
combustión, la mezcla de aire y combustible es relativamente homogénea en
el momento del inicio de la combustión. Si el suministro de carburante se
realiza directamente dentro de la cámara, al momento de la combustión la
mezcla es heterogénea.
Se produce un autoencendido cuando la mezcla se inflama al superar su
temperatura de encendido durante la compresión o cuando se inyecta
combustible en aire en condiciones propicias para que dicho combustible se
inflame. Mientras que si el inicio de la combustión se da con ayuda de una
chispa (bujía) se tiene un encendido por chispa.
En la tabla 1 se observa esquemáticamente la sistemática de los motores de
combustión.
29
Tabla 1. Sistemática de la máquina de combustión
(Bosch GmbH, Robert, 2005)
2.1.2. CLASIFICACIÓN DE LOS MOTORES DE COMBUSTIÓN INTERNA
Luego de conocer la clasificación general de una máquina térmica o motor,
es necesario centrar el estudio en el motor de combustión interna, y conocer
su clasificación específica.
1) Por el tipo de encendido, los MCIA se distinguen entre:
Motores Otto.- Son motores de encendido provocado (MEP). Funcionan
preferentemente con gasolina; la mezcla se puede formar tanto fuera de
la cámara de combustión en sistemas de inyección indirecta (en el
colector de admisión, antes de entrar a la cámara) como dentro de la
cámara en sistemas de inyección directa; la combustión en el cilindro se
produce por encendido por chispa.
30
Motores Diésel.- Se los denomina motores de encendido por compresión
(MEC). Se impulsan con diésel o gasoil; la formación de la mezcla es
interior directa o indirecta, en una precámara ubicada en la culata, y la
combustión se da por el autoencendido del combustible provocado al
inyectarlo en el aire comprimido que se encuentra a alta presión y
temperatura dentro de la cámara (Bosch, 2010).
2) Por el modo de trabajar (forma de hacer renovación de carga) se dividen
en:
Motores de cuatro tiempos.- Tienen el cambio de gases “cerrado”
(separado) y para que se cumpla un ciclo de trabajo son necesarias 4
carreras del pistón o 2 giros del cigüeñal. Sus ciclos se explican en la
figura 4.
Motores de dos tiempos.- El cambio de gases es “abierto” y necesita 2
carreras o 1 giro del cigüeñal para un ciclo de trabajo.
Figura 4. Fases de un motor de 4 tiempos
(MecánicaMotor, 2012)
31
3) Por el tipo de refrigeración pueden ser:
Motores refrigerados por líquido
Motores refrigerados por aire
Figura 5. Motores refrigerados por líquido (A) y por aire (B)
(Mecánica Virtual, 2013)
4) Según el movimiento del pistón se clasifican en:
Motores de pistón con movimiento alternativo
Motores de pistón rotativo
Figura 6. Ciclos de pistón rotativo vs pistón alternativo
(Fueltech, 2013)
32
5) En cuanto a la disposición de los cilindros los motores son:
Motores de cilindros en línea
Motores de cilindros opuestos u horizontales
Motores de cilindros en V
Figura 7. Disposición de los cilindros de un motor
(GTZ, 1985).
2.2. PARÁMETROS GEOMÉTRICOS DEL MOTOR
Para que un motor funcione adecuadamente, existen ciertos parámetros que
se deben tener en cuenta para dimensionar adecuadamente su diseño.
Los parámetros geométricos son aquellos que permiten definir la geometría
básica de un motor de combustión interna alternativo (MCIA), es decir
caracterizar geométricamente las dimensiones de los elementos más
importantes. Estos parámetros se fijan al momento de diseñar un motor, lo
cual condiciona su posterior funcionamiento.
1)
Carrera del pistón (S).- Es el recorrido del pistón dentro del cilindro
durante su movimiento alternativo, el cual va desde el punto muerto superior
33
(PMS) hasta el punto muerto inferior (PMI). La carrera (S) es el doble de la
longitud de la manivela del cigüeñal (r), lo cual se expresa en la ecuación 1:
[1]
2)
Diámetro del cilindro (D).- Es el que caracteriza de mejor manera el
tamaño de un motor, junto con la carrera; se lo llama también calibre.
El diámetro del cilindro es ligeramente mayor al diámetro del pistón para
permitir que éste se deslice dentro procurando una fricción mínima; sin
embargo para efectos de cálculos se desprecia esa mínima diferencia y se
consideran iguales ambos diámetros.
3)
Relación carrera – diámetro (S/D).- Permite clasificar a los motores en
tres tipos: alargados cuando el diámetro es mayor que la carrera, cuadrados
cuando diámetro y carrera son iguales y supercuadrados cuando el diámetro
del pistón es mayor que su carrera.
Estas diferentes relaciones tienen ventajas y desventajas, las cuales se
detallan en la tabla 2.
Tabla 2. Ventajas e inconvenientes de los motores según la relación S/D
(Payri & Desantes, 2011)
En los MCIA, la relación carrera - diámetro permite relacionarse con el
volumen de la cámara de combustión, como se indica en la figura 8.
34
Figura 8. Comparación entre cilindros de distinto S/D, con igual cilindrada y
relación de compresión volumétrica
(Payri & Desantes, 2011)
Los valores más utilizados en las diferentes aplicaciones de los MCIA, los
cuales son útiles para efectos de diseño de motores e influyen en el
rendimiento de cada motor dependiendo de sus requerimientos, se muestran
en la tabla 3.
Tabla 3. Valores habituales para la relación carrera – diámetro
(Payri & Desantes, 2011)
4)
Longitud o radio de la manivela (r).- Se mide entre los centros del
muñón de bancada y el muñón de biela. La manivela es el elemento que
permite convertir el movimiento de la biela en una rotación alrededor del eje
del cigüeñal. Se une en un extremo con la biela, de la cual recibe la fuerza
por la expansión de los gases, y con el otro transmite el par de giro al
cigüeñal.
35
5)
Longitud de la biela (ℓ).- Es aquella que está entre el centro del muñón
de biela en el cigüeñal y el centro del bulón en el pistón. Lo más conveniente
sería que la longitud entre los centros de la biela sea mínima para reducir la
altura del motor, pero también se debe considerar que la falda del pistón no
choque con el cigüeñal en PMI.
Para obtener el valor de lambda (λ), que es la relación entre la longitud de la
biela (ℓ) con el radio del cigüeñal (r), se aplica la ecuación 2.
[2]
Este valor es adimensional y está establecido, por motivos de diseño que
serán demostrados en esta tesis, entre 0.2 a 0.4.
Estas dimensiones geométricas son las que se ven en la figura 9.
Figura 9. Dimensiones: longitud de biela, radio de manivela
(GTZ, 1986)
Dónde:
Radio de la manivela, semicarrera del pistón
ℓ
Longitud de la biela
36
ℓa
Longitud del arco en el círculo del cigüeñal
[3]
S
Carrera del pistón, diámetro de la manivela
Recorrido del pistón (correspondiente al arco la)
α
Ángulo girado por el cigüeñal en grados
β
Ángulo de la biela en grados
Velocidad de giro del cigüeñal
D
Diámetro del cilindro
6)
Área del pistón (Ap).- Es el área sobre la que se ejerce la presión de
los gases para obtener trabajo. La sección de las válvulas está limitada por
este parámetro. Se obtiene mediante la ecuación 4.
[4]
7)
Volumen de la cámara de combustión (Vc).- Es el volumen mínimo
que se alcanza al comprimir los gases en el cilindro cuando el pistón está en
PMS.
8)
Cilindrada (Vh, VH).- La cilindrada unitaria (Vh) es el volumen
desplazado por el pistón dentro del cilindro cuando va desde el PMS al PMI,
se calcula mediante la ecuación 5.
[5]
La cilindrada total (VH) del motor, calculada mediante la ecuación 6, es el
volumen unitario por el número de cilindros; está directamente relacionada
con la potencia del motor ya que define su capacidad para admitir aire.
37
[6]
Figura 10. Dimensiones: área del pistón, volumen de la cámara de
combustión, cilindrada, relación de compresión
(GTZ, 1986)
9)
Relación de compresión (ε).- Expresa las veces que se comprimió el
volumen de aire o mezcla aire – combustible en el cilindro hasta ocupar el
volumen de la cámara de combustión. En motores MEP (a gasolina) el valor
no debe ser excesivo para evitar el autoencendido, mientras que en motores
MEC (a diésel) debe ser el suficiente para producir autoencendido; estos
valores se pueden ver en la tabla 4.
[7]
Tabla 4. Valores habituales para la relación de compresión
(Payri & Desantes, 2011)
38
2.3. CONCEPTOS BÁSICOS DE CINEMÁTICA
El siguiente tema que es necesario comprender para el estudio referido en
esta tesis es la mecánica y cinemática.
Dentro de la ciencia de la física, la mecánica es aquella parte que tiene por
objeto estudiar el estado de movimiento de los cuerpos, buscar sus causas y
establecer las leyes que rigen estos movimientos; la cual se divide en dos
ramas: la cinemática y la dinámica.
La cinemática es la parte de la mecánica que se ocupa de la descripción del
movimiento de los cuerpos, en un espacio y tiempo determinados, sin tener
en cuenta las causas que lo producen (Giancoli, 2002). Estudia problemas
de trayectorias, posiciones, desplazamientos, velocidades, aceleraciones,
etc, desde un punto de vista gráfico o analítico (Grupo de Investigación de
Ingeniería Mecánica Aplicada y Computacional, 2006).
La posición de una partícula en el espacio constituye una magnitud vectorial
que permite establecer su localización dentro de un sistema coordenado de
referencia.
El desplazamiento de una partícula u objeto (Δx) es el cambio o variación de
posición de éste hacia un punto x2 con respecto al punto inicial de referencia
(x1), y está definido por la ecuación 8.
–
[8]
Trayectoria es la línea que describe la partícula en su movimiento al ir
ocupando distintas posiciones en el transcurso del tiempo. El tipo de
trayectoria permite considerar dos tipos de movimiento:
Movimiento rectilíneo, cuando la trayectoria es recta;
39
Movimiento curvilíneo, cuando la trayectoria es curva; un caso particular
es el movimiento circular, en el que la trayectoria es una circunferencia
(González Fernández, 2009).
El movimiento rectilíneo es de dos tipos:
Uniforme, cuando en espacios de tiempo iguales se recorren trayectos
iguales;
Variado, cuando en espacios de tiempo iguales se recorren trayectos de
magnitudes distintas entre sí ya que la velocidad aumenta o disminuye
(GTZ, 1985).
En la figura 11 se pueden apreciar los dos tipos de movimientos.
Figura 11. Movimiento uniforme y movimiento variado
(GTZ, 1985)
El movimiento alternativo es un tipo de movimiento variado ya que es un
movimiento de ida y vuelta con velocidad variable. Esto ocurre en el caso del
movimiento del pistón, el cual va de cero hasta una velocidad máxima para
luego tener una desaceleración que lo lleva de nuevo a cero, como se puede
ver en la figura 12.
40
Figura 12. Movimiento alternativo del pistón
(GTZ, 1986)
La velocidad expresa el cambio de posición del objeto o trayecto recorrido
(Δx) con relación al tiempo empleado (Δt). Se expresa con la ecuación 9:
[9]
Cuando un objeto rígido tiene una trayectoria circular éste tiene velocidad
angular, la cual se define como la relación del desplazamiento angular (Δθ)
de un objeto rígido al intervalo de tiempo Δt durante el que se presenta el
desplazamiento, y se expresa mediante la ecuación 10:
[10]
La aceleración se define como la rapidez de cambio de la velocidad (Δ ) de
un cuerpo con respecto al tiempo. Está expresada en la ecuación 11:
[11]
41
2.4. CINEMÁTICA DE MÁQUINAS Y MECANISMOS
Al entender a qué se refiere la cinemática en general, se debe también
conocer cómo se aplica a las máquinas y mecanismos.
En el ámbito de la teoría de máquinas y mecanismos se diferencian el
análisis y la síntesis de mecanismos. El análisis consiste en estudiar la
cinemática y la dinámica de un mecanismo según las características de los
elementos que lo constituyen. Por tanto, el análisis de un mecanismo
permitirá, por ejemplo, determinar la trayectoria de un punto de una barra o
una relación de velocidades entre dos miembros (Cardona Foix & Clos
Costa, 2001).
Una máquina es un conjunto de elementos que interactúan entre sí para
aprovechar, regular o dirigir la acción de una fuerza. Estos dispositivos
pueden recibir cierta forma de energía y transformarla en otra para generar
un determinado efecto. Los elementos que constituyen las máquinas se
llaman mecanismos. En función del número de mecanismos que conformen
la máquina se distinguen dos tipos de máquinas: simples y compuestas.
De acuerdo a sus fuentes de energía, las máquinas pueden clasificarse de
distintas formas. Las máquinas manuales son aquellas cuyo funcionamiento
requiere de la fuerza humana. Las máquinas eléctricas (como los
generadores), en cambio, transforman la energía cinética en otra energía
gracias a contar con circuitos magnéticos y circuitos eléctricos. Las
máquinas hidráulicas y las máquinas térmicas, por su parte, utilizan fluidos.
Entre los componentes de una máquina, suelen destacarse el motor (el
dispositivo que permite generar la energía para el desarrollo del trabajo
requerido), el mecanismo (los elementos mecánicos que transforman la
energía portada por el motor) y el bastidor (una estructura rígida que enlaza
42
el motor y el mecanismo). El conjunto de máquinas se conoce como
maquinaria (Real Academia Española, 2001).
Un mecanismo se define como la combinación de cuerpos resistentes
conectados por medio de articulaciones móviles para formar una cadena
cinemática cerrada con un eslabón fijo y cuyo propósito es transmitir o
transformar las fuerzas y el movimiento (Reuleaux, 1875). Una cadena
cinemática es un conjunto o subconjunto de miembros de un mecanismo
enlazados entre sí. Por ejemplo, la cadena de transmisión de un vehículo, el
mecanismo pistón-biela-manivela, etc. Los miembros de una cadena
cinemática se denominan eslabones (Cardona Foix & Clos Costa, 2001). La
multiplicación de esfuerzo conseguida por ese mecanismo se denomina
ventaja mecánica (Shigley & Uicker, 2001).
Los mecanismos pueden clasificarse de acuerdo a distintas variables:
* De acuerdo a la función pueden ser de transmisión o de transformación.
* De acuerdo al movimiento que ocasionan pueden ser lineales o circulares.
(Dpto. de Tecnología de Aragón, 2009).
2.4.1. MECANISMOS DE TRANSMISIÓN DE MOVIMIENTO
Son mecanismos que transmiten el movimiento, fuerza y potencia de un
punto a otro sin cambiar la naturaleza del movimiento, pueden ser de dos
tipos:
Mecanismos de transmisión lineal
Mecanismos de transmisión circular
43
2.4.1.1.
Mecanismos de transmisión lineal
Un mecanismo de transmisión lineal es aquel en el que tanto el elemento de
entrada como el de salida tienen movimiento lineal. Pueden ser poleas y
palancas.
a) Sistema de poleas
Una polea es una rueda con una ranura que gira alrededor de un eje por la
que se hace pasar una cuerda que permite vencer una resistencia R de
forma cómoda aplicando una fuerza F. De este modo podemos elevar pesos
hasta cierta altura. Es un sistema de transmisión lineal pues el movimiento
de entrada y salida es lineal. Tenemos cuatro posibles casos que se
observan en la figura 13: polea fija, polea móvil, polipasto potencial y
polipasto exponencial.
Figura 13. Tipos de sistemas de poleas
(Wikipedia, 2011)
44
b) Palanca
Es un sistema de transmisión lineal. La palanca es una barra rígida que gira
en torno a un punto de apoyo o fulcro. En un punto de la barra se aplica una
fuerza F, con el fin de vencer una resistencia R.
La palanca se encuentra en equilibrio cuando el producto de la fuerza (F) por
la distancia al punto de apoyo d (brazo de la fuerza) es igual al producto de
la resistencia a vencer (R) por la distancia al punto de apoyo r (brazo de la
resistencia).
[12]
Cuando la resistencia a vencer es mayor que la fuerza a aplicar se dice que
la palanca tiene ventaja mecánica.
Existen tres tipos de palancas, en función de la posición relativa entre fuerza,
resistencia y punto de apoyo, como se ve en la figura 14.
Figura 14. Tipos de palancas
(Dpto. de Tecnología de Aragón, 2009)
45
2.4.1.2.
Mecanismos de transmisión circular
Un mecanismo de transmisión circular es aquel en el cual tanto el elemento
de entrada como el de salida tienen movimiento circular La principal utilidad
de este tipo de mecanismos radica en poder aumentar o reducir la velocidad
de giro de un eje tanto cuanto se desee. Por ejemplo: el motor de una
lavadora gira a alta velocidad, pero la velocidad del tambor que contiene la
ropa, gira a menor velocidad. Es necesario, pues, este tipo de mecanismo.
Para desempeñar su misión, las máquinas disponen de partes móviles
encargadas de transmitir la energía y el movimiento de las máquinas
motrices a otros elementos. Estas partes móviles son los elementos
transmisores, que pueden ser directos e indirectos.
a) Ruedas de fricción
Son elementos de máquinas que transmiten un movimiento circular entre
dos árboles de transmisión gracias a la fuerza de rozamiento entre dos
ruedas que se encuentran en contacto directo. A este tipo de transmisión
también se le conoce como transmisión por fricción.
La relación de transmisión, expresada en la ecuación 13, es la relación de
velocidades entre la rueda conducida o receptor (n2) y la rueda conductora o
motriz (n1), o lo que es lo mismo, entre la rueda de salida y la rueda de
entrada, por lo que la velocidad del eje de salida será mayor cuanto menor
sea el diámetro de la rueda conducida.
[13]
Dónde:
Relación de transmisión
46
n1
Velocidad rueda motriz (rpm)
n2
Velocidad rueda conducida (rpm)
D1
Diámetro rueda motriz (rpm)
D2
Diámetro rueda conducida (rpm)
b) Poleas con correa
Se trata de dos ruedas situadas a cierta distancia, que giran a la vez por
efecto de una correa. Las correas suelen ser cintas de cuero flexibles y
resistentes. Las hendiduras de ambas poleas tienen el mismo tamaño y la
correa entre ambas debe tener la tensión adecuada para que se transmita el
movimiento. Existen multitud de tipos de correas siendo las más comunes la
plana, cilíndrica, trapezoidal y eslabonada.
Los diferentes sistemas de transmisión de movimiento mediante correas se
muestran en la figura 15.
Figura 15. Transmisión por correas
(GTZ, 1986)
47
c) Engranajes
Los engranajes son ruedas dentadas que encajan entre sí, de modo que
unas ruedas transmiten el movimiento circular a las siguientes. El tamaño de
los dientes de todos los engranajes debe ser igual. La transmisión de
movimiento por engranajes es adecuada para transmitir grandes fuerzas
porque los dientes de los engranajes no deslizan entre sí, por el contrario en
la transmisión por ruedas de fricción y poleas con correa se produce un
deslizamiento, aunque en ocasiones puede ser beneficioso para absorber
cambios bruscos de velocidad como acelerones o frenadas.
Hay diferentes tipos de engranajes, los cuales se pueden ver en la figura 16.
Figura 16. Tipos de engranajes en función de la forma de sus dientes
(Dpto. de Tecnología de Aragón, 2009)
d) Piñones con cadena
Este sistema de transmisión consiste en dos ruedas dentadas de ejes
paralelos, situadas a cierta distancia la una de la otra, y que giran a la vez
por efecto de una cadena que engrana a ambas. La relación de transmisión
se calcula como en el caso de los engranajes.
e) Tornillo sinfín y rueda
Se trata de un tornillo que se engrana a una rueda dentada, cuyo eje es
perpendicular al eje del tornillo. Por cada vuelta del tornillo sinfín acoplado al
48
eje motriz, la rueda dentada acoplada al eje de arrastre gira un diente. Este
sistema tiene una relación de transmisión muy baja, es decir, es un
excelente reductor de velocidad. Se emplea por ejemplo en las clavijas que
tensan las cuerdas de las guitarras. El elemento motriz es el tornillo, nunca
al revés, el sistema no es reversible. La relación de transmisión en este
sistema es:
siendo z el número de dientes de la rueda (Dpto. de
Tecnología Cejarosu, 2005).
2.4.2. MECANISMOS DE TRANSFORMACIÓN DE MOVIMIENTO
Este tipo de mecanismos transforman un movimiento circular en uno lineal, o
a la inversa. Pueden ser de dos tipos:
Mecanismos de transformación circular en lineal o a la inversa
Mecanismos de transformación circular en lineal alternativo o a la inversa
2.4.2.1.
Mecanismos de transformación circular en lineal
En un mecanismo de transformación de movimiento circular en lineal, el
elemento de entrada tiene movimiento circular, mientras que el elemento de
salida tiene movimiento lineal, o a la inversa.
a) Torno
Es un cilindro que consta de una manivela que lo hace girar, de forma que
es capaz de levantar pesos con menos esfuerzo. Se puede considerar como
una palanca de primer grado cuyos brazos giran 360º. Es una palanca cuyo
49
punto de apoyo es el eje del cilindro, el brazo de la fuerza d es la manivela y
el brazo de la resistencia r es el radio del cilindro. Como la longitud de la
manivela es mayor que el radio del torno, la palanca tendrá ventaja
mecánica.
b) Piñón – cremallera
Este sistema transforma el movimiento circular en rectilíneo por medio de
dos elementos dentados: un piñón que gira sobre su propio eje y una barra
dentada denominada cremallera. Los dientes pueden ser rectos o
helicoidales. Cuando la rueda dentada gira, la cremallera se desplaza con
movimiento rectilíneo tal como se indica en la figura 17; se trata de un
mecanismo reversible. Se utiliza en columnas de taladradoras, sacacorchos,
direcciones de automóviles, etc.
Figura 17. Esquema del mecanismo piñón – cremallera
(Santillana, 2013)
c) Tornillo – tuerca
Este sistema sirve como elemento de unión entre dos o más piezas. Pero,
además posee unas características que le permiten que se pueda utilizar
para transmitir el movimiento. Se compone de una varilla roscada y una
pieza con un agujero roscado de la misma métrica o medida, como en la
figura 18. Al girar la varilla, permaneciendo fija la tuerca, hace que esta
50
última se desplace en sentido longitudinal del eje, con lo que se consigue
transformar un movimiento circular uniforme en otro lineal. También se trata
de un mecanismo reversible. Un parámetro clave en este sistema es el paso,
que es la distancia en milímetros entre vuelta y vuelta.
Figura 18. Sistema de tornillo – tuerca utilizado en gatas mecánicas
(Santillana, 2013)
2.4.2.2.
Mecanismos
de
transformación
circular
en
lineal
alternativo
Un mecanismo de transformación de movimiento circular en lineal alternativo
es aquel en el que el elemento de entrada tiene movimiento circular,
mientras que el elemento de salida tiene movimiento lineal alternativo, o a la
inversa.
a) Sistema biela – manivela
Está formado una barra articulada por un extremo con una manivela y por el
otro con un pistón que describe un movimiento alternativo. Al girar el eje, la
51
manivela transmite un movimiento circular a la biela que experimenta un
movimiento de vaivén; este sistema también funciona a la inversa. Estos
movimientos se observan en la figura 19.
Fue fundamental en el desarrollo de la locomotora de vapor, y en la
actualidad se utiliza en motores de combustión interna, limpiaparabrisas,
máquinas herramientas, etc.
Figura 19. Esquema del sistema biela – manivela
(Santillana, 2013)
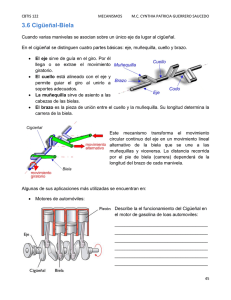
b) Cigüeñal
Es un sistema compuesto por la unión de múltiples manivelas en un mismo
eje acopladas a sus correspondientes bielas, tal como se ve en la figura 20.
Transforma un movimiento circular en los movimientos alternativos de vaivén
desacompasados de las diferentes bielas. También puede transformar los
movimientos de vaivén desacompasados de las diferentes bielas en un
movimiento circular. Los cigüeñales son empleados en todo tipo de
mecanismos que precisen movimientos alternativos sincronizados como por
ejemplo los motores de los autos.
52
Figura 20. Esquema del cigüeñal
(Santillana, 2013)
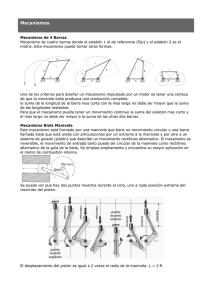
c) Excéntrica
Es una rueda que tiene una barra rígida unida en un punto de su perímetro.
Su eje de giro no coincide con su eje geométrico, por lo que transforma el
movimiento circular en rectilíneo alternativo. En la figura 21 se puede
apreciar cómo funciona este mecanismo.
Figura 21. Funcionamiento de una excéntrica
(Dpto. de Tecnología Cejarosu, 2005)
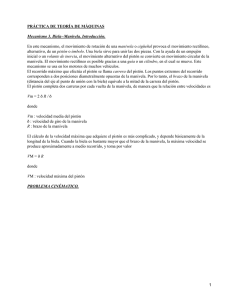
d) Leva
Es un elemento mecánico que va sujeto a un eje y tiene un contorno con
forma especial. De este modo, el giro del eje hace que el perfil o contorno de
la leva tope, mueva, empuje o conecte una pieza conocida como seguidor.
53
Permite obtener un movimiento alternativo, a partir de uno circular; pero no
nos permite obtener el circular a partir de uno alternativo (o de uno
oscilante); es por tanto un mecanismo no reversible. Este mecanismo se
emplea en motores de vehículos (para la apertura y cierre de las válvulas),
programadores de lavadoras (para la apertura y cierre de los circuitos que
gobiernan su funcionamiento), etc (Cabrera, 2013).
Figura 22. Mecanismo leva – seguidor
(Santillana, 2013)
2.4.3. OTROS MECANISMOS DE INTERÉS
Aparte de los mecanismos de transmisión y transformación de movimiento,
existen otros mecanismos entre los que se destacan los siguientes:
a)
Tornillo.- Es un plano inclinado, pero enrollado sobre un cilindro.
Cuando se aplica presión y se enrosca, se multiplica la fuerza aplicada, cada
filete de rosca hace de cuña, introduciéndose en el material con poco
esfuerzo. Los parámetros básicos de un tornillo son el paso, que es la
distancia entre vuelta y vuelta, y la métrica que es el diámetro del tornillo.
54
b)
Plano inclinado.- Es una rampa que sirve para elevar cargas
realizando menos esfuerzo. Cuanto menor sea la pendiente menor será la
fuerza a aplicar y mayor el recorrido.
c)
Trinquete.- Es un mecanismo que sirve para dirigir el movimiento,
permite a un engranaje girar hacia un lado, pero impide hacerlo en sentido
contrario, ya que lo traba con dientes en forma de sierra. (Dpto. de
Tecnología de Aragón, 2009).
Todos los mecanismos existentes pueden ser utilizados de distintas maneras
para conseguir variaciones de movimientos, tal como lo muestra la tabla 5.
Tabla 5. Movimientos y mecanismos
(Dpto. de Tecnología Cejarosu, 2006)
55
2.5. CINEMÁTICA DEL MECANISMO BIELA – MANIVELA
Por último, nos centraremos en el tema principal, que es la aplicación y el
estudio de la cinemática específicamente en el mecanismo biela – manivela
del motor de combustión interna alternativo.
Dentro del análisis de la cinemática del mecanismo biela – manivela se
busca determinar las posiciones, velocidades y aceleraciones de los
diferentes puntos del mecanismo.
El MCIA genera un movimiento alternativo del pistón, ocasionado por la
expansión de los gases de combustión, el cual se transforma en movimiento
circular del cigüeñal mediante un sistema de biela – manivela como los de la
figura 23.
Figura 23. Sistema biela – manivela
Se llama manivela o muñón de bancada a uno de los brazos del cigüeñal, el
cual une el punto de apoyo (centro) y la muñequilla o muñón de biela
(extremo del radio de giro del cigüeñal). La biela está articulada por su pie
con el bulón del pistón y por su cabeza con su muñón. Su misión es
transmitir la fuerza generada por los gases sobre el pistón hacia las
manivelas del cigüeñal y viceversa.
56
Normalmente, el mecanismo biela – manivela está descentrado, por lo que el
eje del cigüeñal no está en el mismo plano que el del cilindro o que el del
bulón.
El descentramiento se emplea principalmente para atenuar los choques del
pistón contra las paredes del cilindro. Por otra parte, el descentramiento
provoca que la inclinación de la biela sea diferente durante las carreras
descendente y ascendente del émbolo, por lo cual el esfuerzo lateral que
ejerce el pistón sobre las paredes del cilindro aumenta mientras más
inclinada está la biela.
La figura 24 muestra una de las situaciones más frecuentes, el bulón
descentrado hacia la cara de empuje del pistón, la cual es en la que se
apoya el pistón sobre el cilindro durante la carrera de expansión.
Figura 24. Descentramiento del eje del bulón
(Payri & Desantes, 2011)
La ecuación para el descentrado relativo, el cual tiene valores establecidos
en límites de diseño entre 0 a 0.15 es:
k
[14]
57
Donde
es el desplazamiento del eje del cilindro con respecto al eje del
cigüeñal y
es el radio de la manivela.
Ya que el valor del descentramiento es relativamente pequeño, se lo
despreciará en los cálculos cinemáticos.
En el estudio cinemático del mecanismo es usual trabajar con la velocidad
angular media del cigüeñal, por lo que no se tiene en cuenta ni la
irregularidad cíclica derivada de las variaciones del par motor ni los efectos
transitorios como una aceleración o una parada (Payri & Desantes, 2011).
La geometría simple de este mecanismo permite una aproximación directa al
análisis exacto de la posición, velocidad y aceleración de su corredera (biela)
con solo ecuaciones de trigonometría plana y escalares (Norton, 2009).
Para determinar la velocidad y la aceleración que alcanza el pistón se debe
determinar primeramente la ecuación de posición del pistón en función del
ángulo girado por el cigüeñal.
Figura 25. Esquema básico de biela – manivela
(Porras & Soriano, 2011)
58
Dónde:
ℓ
Longitud de biela
Radio de la manivela
S
Carrera del pistón
Posición del pistón referida al punto muerto superior
α
Ángulo girado por el cigüeñal contado desde el punto muerto superior
(PMS)
β
Ángulo que forma la biela con el eje del cilindro; oblicuidad de la biela
θ
Ángulo formado entre la biela y la manivela
Observando la figura 25 se puede obtener la ecuación 15:
[15]
Por relaciones trigonométricas se puede sacar que
despejando se puede obtener que
y
y
;
.
Reemplazando estas relaciones en la ecuación 15 se tiene que
, y despejando x y ordenando se llega a:
x = r*(1 – cos α) + ℓ *(1 – cos β)
[16]
(Payri & Desantes, 2011)
En la ecuación 16, el desplazamiento del pistón (x) se expresa en función de
α y de β pero necesitamos calcularlo solo en función del ángulo girado por el
cigüeñal, por lo que es necesario proceder así:
Al tener un lado común los triángulos cuyas hipotenusas son la biela y la
manivela del cigüeñal se puede establecer que:
59
[17]
Ya que λ es la relación entre la longitud de la manivela y la de la biela, que
define la transformación del movimiento alternativo del pistón y el
movimiento alternativo del cigüeñal, se tiene que:
[18]
De la ecuación anterior se obtiene β para cada posición α de la manivela, el
cual tendrá su valor máximo cuando α sea de 90° y 270° (por simetría).
Como
, se sustituye senβ por su valor en función de α y
se tiene que:
[19]
Sustituyendo este valor se tiene la expresión del desplazamiento del pistón
en función del ángulo girado por la manivela, cuya ecuación es:
[20]
(Porras & Soriano, 2011)
Ésta ecuación se puede expresar también por medio de un solo término, lo
cual es útil al momento de representar el papel que juega la velocidad de
giro del cigüeñal y sus armónicas como generadoras de vibraciones en el
motor; además de que es una forma un poco más simplificada con la que se
puede trabajar mejor.
Aplicando el teorema del binomio, el cual establece que
, a la expresión que se
encuentra en el radical de la ecuación 20 tomando en cuenta que
y
,
se tiene la siguiente expansión:
[21]
60
En términos prácticos, si se trunca la expansión en el segundo término y
teniendo en cuenta que el valor de λ en los motores modernos oscila entre
0,22 a 0,33, el error que se tendría sería de menos del 1%.
Así, se reemplaza la ecuación 21 en la 20:
, se reemplaza ℓ por
, y se agrupa por factor común
En virtud de ello, la ecuación del desplazamiento del pistón es:
[22]
La representación gráfica de la ecuación 22 en ejes cartesianos en los que
en abscisas se tome el ángulo girado por el cigüeñal y en ordenadas el valor
del desplazamiento angular del pistón, ofrece una gráfica (realizada en
fooplot.com) como la que se presenta en la figura 26.
Figura 26. Diagrama de desplazamiento del pistón
61
En el diagrama anterior se observa que para un movimiento angular de la
manivela α=90°, el pistón recorre una longitud mayor que la mitad de la
carrera. Esto significa que, si la velocidad de giro del cigüeñal es constante,
para recorrer la primera mitad de la carrera el motor emplea un tiempo
menor que para recorrer la segunda mitad.
Se puede encontrar el ángulo girado por el cigüeñal en el instante que el
pistón recorre la mitad de la carrera mediante el siguiente procedimiento:
en la mitad de la carrera, porque
ecuación de la posición del pistón
; lo cual se reemplaza en la
y se despeja
α, así:
[23]
La velocidad se calcula mediante la expresión
; es decir, hallando la
derivada del espacio con respecto al tiempo.
La
ecuación
anteriormente, también puede expresarse teniendo en cuenta que
hallada
,
como en la ecuación 24:
[24]
62
Como x está expresada en función de α y hay que calcular su derivada
respecto al tiempo, se debe expresar
.
Considerando la velocidad angular del cigüeñal constante, se tiene que
, por lo que se tiene la ecuación 25:
[25]
(Porras & Soriano, 2011)
Ecuación en la que la velocidad angular del motor ω se expresa en rad/s.
Como r es mucho más pequeño que ℓ y como
tiene como valor
máximo la unidad, es posible despreciar el término
, por lo que la
expresión
puede considerarse que tiende a 1. Por lo tanto, la
velocidad del pistón puede calcularse más fácilmente, de forma aproximada,
mediante la ecuación 26:
[26]
Como
, se puede expresar la velocidad mediante la
ecuación 27:
[27]
Si en unos ejes cartesianos, en los que se toman en abscisas el ángulo
girado por el cigüeñal y en ordenadas la velocidad del pistón, se obtiene la
representación gráfica de la ecuación de la velocidad (ecuación 27), ésta
ofrece una gráfica (elaborada en www.wolframalpha.com) como la que se
representa en figura 27.
63
Figura 27. Diagrama de la velocidad del pistón
La observación de la figura anterior indica que, tanto en el punto muerto
superior (PMS) como en el punto muerto inferior (PMI), la velocidad del
pistón es nula y que, a partir del PMS aumenta hasta llegar a un valor
máximo que coincide con el instante en el que biela y manivela son
perpendiculares, disminuyendo a continuación hasta que en el PMI se hace
de nuevo nula.
Se puede demostrar analíticamente que, en el instante que el pistón alcanza
su velocidad máxima, la biela y la manivela están formando 90°, mediante el
siguiente procedimiento:
Primero debemos obtener los máximos de la ecuación
mediante derivadas y luego despejar α:
64
; se omite la raíz con signo negativo debido a que el
coseno de un ángulo es positivo cuando su valor está entre 0º y 90º, lo cual
es lo que buscamos.
[28]
Para comprobar que efectivamente se trata de un máximo, se encuentra la
segunda derivada en la cual se reemplaza α;
debe ser mayor que cero.
Al obtener α se puede calcular β mediante la fórmula
.
Gracias a una de las propiedades de los triángulos obtenida por la geometría
euclidiana, que dice que la suma interna de sus ángulos es igual a 180° (π
radianes), se puede saber que θ=180°-α-β; lo cual, resolviendo, dará un
resultado de 90°.
Las variaciones de velocidad indican la existencia de aceleraciones, cuyo
.
valor vendrá dado por la derivada de la velocidad respecto al tiempo
Como la expresión de la velocidad es función del ángulo girado por el
cigüeñal, para poder derivar en función del tiempo se recurre a considerar:
[29]
Y como se expresó anteriormente ω =
, derivado se llega a que:
[30]
(Porras & Soriano, 2011)
65
La representación gráfica de la ecuación 30, en unos ejes cartesianos en los
que se toma en abscisas el valor del ángulo girado por el cigüeñal y en
ordenadas el de la aceleración del pistón, ofrece una gráfica (realizada en
www.wolframalpha.com) como la que se representa en la figura 28.
Figura 28. Diagrama de la aceleración del pistón en función de los ángulos
de rotación de la manivela
El análisis de la gráfica anterior indica que:
-
El valor de la aceleración es cero cuando es máxima la velocidad del
pistón,
instante
que
coincide
cuando
biela
y
manivela
son
perpendiculares.
-
La aceleración tiene un máximo en el PMS, que corresponde con α=0°,
cuyo valor es:
[31]
-
La aceleración tiene un mínimo en el PMI, que corresponde a
en el cual se tiene
y
,
, cuyo valor es:
[32]
(Porras & Soriano, 2011)
66
3.
METODOLOGÍA
Para la construcción del banco de pruebas que demuestre la aplicación de
los parámetros cinemáticos del motor en el mecanismo biela – manivela, se
pensaron varias alternativas. Después de tener en cuenta diferentes
variables se optó por realizar una maqueta utilizando un MCIA básico y
realizarle los cortes necesarios al cilindro para poder observar el mecanismo
interno, fabricar una estructura que cumpla la función de sostener dicho
mecanismo y permitir su funcionamiento, acoplar un mecanismo para el
movimiento del motor y adaptar un software que permita la obtención
electrónica de los valores cinemáticos del motor.
3.1. CARACTERÍSTICAS TÉCNICAS DEL MOTOR
Luego de analizar el costo, la disponibilidad y la facilidad de adaptación a la
necesidad requerida, se optó por utilizar el bloque cilindro, el pistón con sus
rines, la biela y el cigüeñal de un motor de una moto Suzuki modelo GN125
como el de la figura 29.
Figura 29. Motor de Suzuki GN 125
68
Es un motor monocilíndrico de 4 tiempos, SOHC con 2 válvulas y refrigerado
por aire; tiene una cilindrada de 124 cc y relación de compresión de 9.2:1;
entrega una potencia máxima de 12.5 HP a 9 000 rpm y un torque de 8,92
N.m a 6 500 rpm.
Los parámetros geométricos originales de este motor son:
Radio de la manivela
= 24 mm
Longitud de la biela ℓ = 109 mm
Relación radio – manivela (factor lambda)
Diámetro del cilindro D = 57 mm
Carrera del pistón S = 48 mm
Relación
--> motor supercuadrado
3.2. SISTEMA MECÁNICO
3.2.1. SELECCIÓN DE MATERIALES
Para la selección de los materiales que se deben utilizar en cualquier trabajo
es necesario tener en cuenta las siguientes consideraciones:
Consideraciones dimensionales, de forma y peso (diseño)
Consideraciones de resistencia mecánica
Conocimiento de condiciones de operación
69
Resistencia al desgaste
Facilidad y procedimientos de fabricación
Requisitos de durabilidad
Costos y disponibilidad
Para conocer qué tipo de acero se debe utilizar, existen diversas
clasificaciones de aceros según normas internacionales.
Los materiales comúnmente utilizados en ingeniería se pueden clasificar de
la siguiente manera:
* Materiales metálicos.- Aleaciones ferrosas, aleaciones no ferrosas.
* Materiales no metálicos.- Plásticos, cerámicos, materiales compuestos.
Las aleaciones ferrosas se pueden clasificar a su vez en aceros y
fundiciones de hierro (hierros colados). Los aceros, dependiendo de su
contenido de carbono y de otros elementos de aleación, se clasifican en
aceros simples, aceros aleados y aceros de alta aleación.
Los aceros simples, también llamados aceros dulces o aceros al carbono,
son una aleación de hierro con carbono con un contenido de éste último en
el rango de 0.02% hasta el 2% y con pequeñas cantidades de otros
elementos que se consideran como impurezas tales como P, S, Mn, Cu, Si,
etc. (Díaz del Castillo Rodríguez, 2008). Sus propiedades dependen de la
cantidad de carbono que contenga.
Este es un acero maleable, de alta resistencia y baja aleación, dúctil,
soldable, maquinable y barato. Sus principales aplicaciones son en
estructuras, elementos de máquinas (ejes, resortes, engranes, etc.), tornillos
y herramientas de mano.
Dentro de los aceros existentes, tanto estructurales como comerciales, los
aceros al carbono se usan forjados o en laminación. Para crear láminas de
acero se puede hacer mediante el proceso de laminación en frío o en
caliente.
70
El acero laminado en frío es más duro y resistente, tiene una terminación
suave y gris, es más liviano, de mayor durabilidad al no estar dañado por el
calor, y posee márgenes de tolerancia más precisos.
Las características que debe cumplir el acero, las cuales están determinadas
por las condiciones requeridas para este proyecto, son:
Resistir esfuerzos de fatiga
Tener bajo costo y facilidad de disponibilidad, fabricación y mantenimiento
Tener buena soldabilidad y
Poder ser resistente a la corrosión
Se determinó que el acero que mejor cumple dichas especificaciones es el
acero ASTM A-366. La especificación ASTM A-366 incluye bobinas y
láminas de acero al carbono laminado en frío, de calidad comercial. Este
material se recomienda para piezas tanto expuestas como protegidas, donde
pueden estar involucrados estampados, deformaciones moderadas y
soldaduras (ASTM, 2006-2013). Su composición química es: 0.02% a 0.15%
de carbono, 0.60% máximo de manganeso, 0.03% máximo de fósforo y
0.035% máximo de azufre. Dentro de sus propiedades mecánicas, tiene un
esfuerzo de fluencia de 2 530 kg/cm2 (250 MPa, 36 ksi), un esfuerzo mínimo
de ruptura en tensión de 4 080 kg/cm2 a 5 620 kg/cm2 (400 a 550 MPa, 58 a
80 ksi) y una dureza máxima de 60 HBR.
3.2.2. DISEÑO DE LA MAQUETA Y SUS MECANISMOS
Para empezar, se realizó un esquema general de la maqueta en AutoCAD,
tal como lo muestra la figura 30 y un plano con el diseño que se encuentra
en el anexo #I.
71
Figura 30. Esquema de la maqueta (incluido el motor eléctrico)
Se eligió dicho diseño en base a criterios de facilidad de construcción, es
decir que se buscó hacerla lo más práctica posible.
Los mecanismos y estructuras necesarias para lograr la funcionalidad de la
maqueta fueron:
Un mecanismo para modificar la longitud de la biela, la cual deberá tener
2 medidas establecidas con la finalidad de poder comparar el
comportamiento del motor entre estos 2 valores escogidos.
Un mecanismo para levantar el cilindro cuando se alargue la biela, con el
fin de mantener la posición inicial en la carrera del pistón.
Un medio para darle movimiento al cigüeñal y permitir el funcionamiento
del motor.
Un instrumento para medir manualmente el ángulo que gira el cigüeñal, el
cual debe encajar en el eje del cigüeñal y estar fijo a éste para que gire
junto con el mismo.
Un instrumento para medir la variación en la posición del pistón mientras
recorre su carrera.
72
Una estructura que sirva como bancada del cigüeñal y bases para
sostener todo el sistema.
3.2.3. MECANISMO PARA LONGITUD DE BIELA VARIABLE
En base al diseño del mecanismo, el cual debe ser capaz de aumentar la
longitud de la biela y mantenerla firme durante su funcionamiento, se realizó
un corte en la biela y se necesitaron 2 placas de acero laminado en frío de
especificación ASTM A-366 de 3 mm de espesor (debido a que debían ser lo
suficientemente delgadas como para entrar en el perfil de la biela y lo
suficientemente resistentes como para no deformarse), las cuales se limaron
dándoles la forma interna del perfil de la biela, hasta obtener el acoplamiento
buscado para ubicarlas a cada lado de la biela y así unir las 2 partes y
mantener su firmeza.
Cada placa tiene 4 perforaciones de 3mm de diámetro, 2 fijas y 2 deslizantes
tipo “ojo chino” con una diferencia de 5mm entre sus centros, tal como lo
muestran las figuras 31 y 33, y el plano del anexo #II, con el fin de permitir la
variación de la longitud de la biela en 2 posiciones, manteniendo fijo un
extremo de la biela y dejando que el otro se pueda deslizar desde el extremo
superior de la perforación deslizante (longitud original o mínima) al extremo
inferior de la misma (longitud máxima).
Para la sujeción se utilizaron 4 tornillos de 3mm de diámetro y tuercas.
Se decidió que la longitud cambie en 5 mm ya que al ser menor no serían
apreciables los cambios y si fuera mayor, el valor del factor λ resultaría más
bajo, además de que la biela podría rozar con las paredes del cilindro.
73
Figura 31. Esquema del mecanismo de longitud variable de la biela
Figura 32. Perforaciones en las placas y la biela para variar su longitud
74
Figura 33. Mecanismo de longitud de biela variable
3.2.4. ALTURA VARIABLE DEL CILINDRO
Considerando que, al aumentar la longitud de la biela también subirá la
ubicación del PMS, se diseñó un mecanismo para subir 5mm la posición del
cilindro cuando la biela sea también 5mm más larga. Para esto, tal como se
ve en la figura 34, se colocaron 4 soportes hechos con tuercas en las bases
de sujeción del cilindro, además de 4 aumentos de 5 mm que delimitan la
altura que se debe variar.
Figura 34. Ubicación de soportes para altura variable del cilindro y esquema
de las piezas de aumento
75
3.2.5. MOVIMIENTO DEL CIGÜEÑAL
Para darle el movimiento al cigüeñal se decidió utilizar un motor eléctrico. El
primer parámetro a considerar fue que se necesitaba un motor DC ya que
este tipo de motores es ideal para lograr un control electrónico de
velocidades. Después se determinó la potencia mínima requerida, lo cual se
realizó mediante la ecuación 33.
[33]
Dónde:
P
Potencia mínima requerida
T
Torque necesario
Revoluciones a las que debe girar
η
Rendimiento
Considerando que el peso del motor y sus mecanismos (el cual es de 4.5 kg)
produce una fuerza de 44.1 N, se requiere un torque de 12.35 N.m (la
distancia a la que estará ubicado el eje del motor eléctrico con respecto al
eje del cigüeñal es de 280 mm). Se estableció la velocidad nominal de
funcionamiento del motor en 200 rpm, para que sea una velocidad en la que
se pueda apreciar el movimiento del mecanismo. Reemplazando estos datos
en la ecuación 33 y estableciendo un rendimiento del motor de 80%, se
obtuvo una potencia mínima requerida de 0.20 Hp.
Se consiguió un motor eléctrico (figura 35), el cual funciona con corriente
directa a 24 voltios, entrega una potencia de 150 watts y un torque de hasta
55 N.cm, tiene una caja reductora con una relación de 15:1 para lograr una
velocidad de salida máxima de 200 rpm.
76
Figura 35. Motor eléctrico DC a 24v
Está acoplado al cigüeñal mediante piñones y una cadena de distribución.
Se eligió este mecanismo de transmisión de movimiento debido a que el
cigüeñal ya tiene mecanizado un piñón en su eje; se buscó otro piñón para
acoplarlo al eje del motor eléctrico, el cual tiene las mismas dimensiones que
es piñón en el cigüeñal (16 dientes, 35mm de diámetro exterior, 23 mm de
diámetro de fondo), logrando así una relación de transmisión de 1:1.
Además, se utilizó un transformador para poder conectarlo a 110V y un
circuito para variar las rpm de salida del motor eléctrico.
3.2.6. DISCO DE ÁNGULO DE GIRO
Para medir manualmente el ángulo que va girando el cigüeñal, se colocó una
catalina fija al eje del cigüeñal mediante un bocín y chavetas, la cual está
marcada cada 30° e indica también el punto inicial de giro cuando el pistón
está en el PMS (figura 36).
77
Figura 36. Disco indicador de ángulo de giro
3.2.7. ESCALA DE DESPLAZAMIENTO
Para poder indicar la posición y el desplazamiento que tiene el pistón
durante cada momento dentro del ciclo de funcionamiento se colocó una
escala graduada con precisión de 1 mm, la cual está ubicada en una de las
paredes del corte del cilindro del motor, tal como se observa en la figura 37.
Figura 37. Escala de desplazamiento y corte del cilindro
78
3.2.8. BASE DE BANCADAS DE CIGÜEÑAL Y ESTRUCTURA DE LA
MAQUETA
Para las bases de bancada y la estructura de la maqueta se debe tener en
cuenta, además de sus dimensiones, el peso del mecanismo y sus
elementos, el cual es de aproximadamente 4.5 kg (10 lb).
Las bases se realizaron con placas de acero de especificación ASTM A-366
de 3, 4 y 6 mm de espesor. La unión de dichas placas fue mediante pernos.
Con ayuda de una cizalla se cortaron las placas de acero de acuerdo a las
medidas exactas determinadas previamente e indicadas en los planos de los
anexos #III y #IV realizados en AutoCAD, y los esquemas que se muestran
en las figuras 38 y 39.
Figura 38. Esquema de las placas para la estructura
79
Figura 39. Esquema de la estructura
Luego se realizó perforaciones (figura 40) con brocas de ¼ plg de diámetro y
de 5 mm de diámetro. Para darles la forma requerida, se empleó una
dobladora para las placas pertenecientes al cárter (figura 41).
Figura 40. Perforaciones a las placas de la estructura
80
Figura 41. Doblado de las placas
Para las dos piezas que conforman la bancada del cigüeñal (figura 42) se
fabricaron bocines de bronce fosfórico SAE 40 (resistencia a la corrosión y
facilidad de maquinado) y portabocines de acero aleado con retenedores de
caucho de nitrilo, los cuales se observan en la figura 43 y en el anexo #V en
el cual se encuentra el plano de fabricación; los bocines son para evitar el
desgaste del cigüeñal al momento del giro y los retenedores para evitar el
derrame del lubricante que va dentro del “cárter” del motor.
Figura 42. Bancada del cigüeñal
81
Figura 43. Portabocines con bocines y retenedores
Además, para una correcta alineación, se rectificaron las superficies de
apoyo de la bancada tal como lo muestra la figura 44.
Figura 44. Rectificación de la superficie de la bancada del cigüeñal
En la base de la maqueta a la altura donde está ubicado el cárter se puso un
tapón (perno) para el vaciado del aceite. Para esto se realizó una perforación
con broca de 9mm de diámetro y luego se hizo el proceso de roscado
utilizando un machuelo, tal como lo muestra la figura 45, hasta dejarlo de 10
mm de diámetro x 1.5 mm de paso.
82
Figura 45. Machuelado del agujero para vaciar el cárter
3.2.9. MONTAJE DEL SISTEMA MECÁNICO DE LA MAQUETA
En base al diseño realizado anteriormente, se procedió a montar el
mecanismo biela – cigüeñal en las bancadas y el pistón en el cilindro y luego
poner cada estructura en la base, siguiendo los planos de los anexos #I y
#IV; después se acopló el motor eléctrico.
3.2.9.1.
Unión de la estructura mediante suelda GMAW (MIG)
Para la unión y refuerzo de ciertas partes de la maqueta se utilizó el método
de unión mediante soldaduras (figura 46).
83
Figura 46. Soldadura de la maqueta
La soldadura GMAW (soldadura por arco metálico bajo gas protector) utiliza
un hilo (alambre) para soldar que se alimenta automáticamente a una
velocidad constante; un gas protector, que en este caso fue el helio ya que
se utilizó la suelda MIG, protege la soldadura de la atmósfera y evita la
oxidación del metal base. Se genera un arco entre el metal base y el hilo, el
calentamiento resultante funde éste proporcionando la unión de las placas
base y dejando un cordón de soldadura como el de la figura 47.
Figura 47. Unión por soldadura MIG
Las ventajas de la soldadura GMAW - MIG, las cuales influyeron al momento
de elegir el método de unión por soldadura, son las siguientes:
84
Fácil de aprender a utilizar el equipo
Se puede soldar en todas las posiciones
No produce escoria
Buen acabado
Poca formación de gases contaminantes y tóxicos
Soldadura de buena calidad radiográfica
Soldadura de espesores desde 0,7 a 6 mm sin preparación de bordes
Alta productividad o alta tasa de metal adicionado
Mínimo desperdicio
Proceso semiautomático o automático (menos dependiente de la
habilidad del operador)
Mejor penetración lateral y mayor velocidad de soldeo (al utilizar helio
como gas protector).
3.2.10.
ACABADOS
Una vez finalizado el armado de la maqueta, se vio la necesidad de aplicar
tratamientos de acabado superficial para obtener una adecuada protección
contra la corrosión además de darle el acabado estético.
3.2.10.1.
Capa antioxidante
Las piezas metálicas expuestas al medio ambiente (cilindro, pistón, biela y
cigüeñal) necesitan un tratamiento para evitar su oxidación. Para esto se
utilizó un producto desoxidante y fosfatizante de la marca Dual Etch.
85
Un antioxidante es aquel que previene la oxidación de los metales contra la
acción que generan los ácidos y alcalinos, orgánicos e inorgánicos, sin que
esto sea una protección anticorrosiva.
El líquido desoxidante y fosfatizante que se usó es un tratamiento ácido para
superficies de acero, chapa galvanizada, aluminio, zinc o cobre; destinado a
eliminar óxidos ambientales y térmicos, además de mejorar el anclaje de la
primera capa de pintura a aplicar. Contiene adicionalmente componentes
desengrasantes que ayudaron a obtener una buena limpieza de la superficie
tratada. También contiene sales de zinc que determinan la óptima
composición y máxima adherencia de la capa de fosfatizado que se deposita
(Sherwin - Williams Company, 2013).
El desoxidante se aplicó diluido en agua. Para preparar la superficie primero
se eliminó todo el óxido de hierro que se pudo sacar manualmente con lija;
con un trapo humedecido en disolvente se sacaron los residuos de la
limpieza anterior, las grasas y demás contaminantes y se dejó secar bien.
El desoxidante se aplicó con una brocha, procurando que el producto
penetre bien en el metal; luego de aplicar se dejó secar y se limpió con un
trapo seco el polvillo que se formó por el fosfatizante.
3.2.10.2.
Pintura electrostática
En las placas metálicas que forman parte de la estructura de la maqueta se
realizó un proceso de acabado mediante el recubrimiento por pintura
electrostática o también llamada pintura en polvo para crear un acabado
estético, uniforme y duradero en los metales, el cual se aprecia en la figura
48.
86
Figura 48. Pintura electrostática aplicada en las piezas
Se eligió este tipo de acabado ya que es mucho más duradero que las
pinturas líquidas y es un proceso respetuoso del medio ambiente porque no
hay solventes que se evaporan en el aire o que vayan por el desagüe.
Las ventajas que se tienen se ven reflejadas en la eficiencia de aplicación, el
hecho de que no son inflamables, la reducción de área en el depósito siendo
comparativo con las mismas proporciones de pintura líquida, la reducción de
costos en la deposición de los residuos generados en el proceso, tiene un
reciclaje del 95% de la pintura que no queda aplicada a la pieza, es menos
peligrosa para la salud de los operarios en comparación con la pintura
líquida y tiene una resistencia físico-química muy superior frete a impactos,
rayones, dobleces y agentes químicos (Industrias GM, 2013).
Las piezas que se iban a pintar se conectaron eléctricamente a tierra. El
polvo seco compuesto por una mezcla homogénea de cargas minerales,
resinas y pigmentos se roció sobre las piezas mediante una pistola con bajo
amperaje y alto voltaje. Al rociar, las partículas de polvo cargadas son
87
atraídas con firmeza a la superficie de la parte puesta a tierra hasta que se
derrita; el curado de la pintura electrostática sobre la pieza se realizó por
medio de calor en un horno de curado, lo cual activó la reacción química del
sistema de resinas dando como resultado una capa lisa y uniforme de
pintura.
3.3. SISTEMA ELECTRÓNICO
Una vez listo el sistema mecánico, es necesario complementar el
funcionamiento de la maqueta mediante un control electrónico, el cual tendrá
la función de controlar la velocidad del motor eléctrico y de sensar dicha
velocidad, además de obtener los datos del motor para calcular el
desplazamiento, la velocidad y la aceleración del pistón y graficar dichos
parámetros.
3.3.1. SELECCIÓN DE ELEMENTOS A UTILIZAR
Para la selección de los elementos electrónicos se tomó en cuenta la
aplicación requerida, la disponibilidad y costo y la facilidad de programación
y manipulación tanto de software como de hardware.
Para lograr un software y hardware amigables con el usuario, de fácil
entendimiento y óptima utilidad, además de simplificar la forma de
programación debido a los conocimientos limitados sobre este tema y reducir
la cantidad de elementos necesarios, se eligieron elementos conocidos
dentro del área electrónica por cumplir dichas características.
88
El centro de control de todo el circuito electrónico se realizó utilizando una
placa Arduino Mega (figura 49) y una Pantalla GLCD (figura 50) con panel
touch (figura 52) para el control y visualización de funciones.
3.3.1.1.
Arduino Mega
Se decidió trabajar con Arduino debido a que es una plataforma de
electrónica abierta para la creación de prototipos basada en software y
hardware flexibles y fáciles de usar. Puede tomar información del entorno a
través de sensores y puede controlar luces, motores y otros actuadores
(Arduino, 2010).
Ya que se requería un buen procesador para graficar de manera correcta las
ecuaciones, se eligió la Arduino Mega, que es una placa microcontrolador
basada en ATmeg1280, la más avanzada dentro de la gama Arduino. Tiene
54 pines de entradas/salidas (de los cuales 14 proporcionan salida PWM),
16 entradas digitales, 4 UARTS (puertos serie por hardware), un cristal
oscilador de 16MHz, conexión USB, entrada de corriente, conector ICSP y
un botón de reset.
Figura 49. Placa Arduino Mega
(Arduino, 2010)
89
3.3.1.2.
Pantalla gráfica TFT LCD 3.2"
Se eligió este tipo de pantalla para obtener una buena visualización de las
gráficas. Una pantalla TFT-GLCD es una variante de la pantalla de cristal
líquido (LCD) de matriz activa que usa tecnología de transistor de película
delgada (TFT) para mejorar su calidad de imagen. La diferencia entre un
LCD de caracteres y un LCD gráfico (GLCD) es que mientras el LCD de
caracteres puede visualizar sólo caracteres alfanuméricos, el LCD gráfico
puede visualizar los mensajes en forma de dibujos y mapas de bits.
Figura 50. Display TFT GLCD 3.2”
(SainSmart, 2010)
Esta pantalla tiene una interfaz de 40 pines, además está diseñada con un
lector de flash o tarjeta SD. Tiene un controlador SSD1289 que soporta una
interfaz de datos de 8 y 16 bits. Entre sus características están: 320 x 240
pixeles, 16.000 colores, 3.2 pulgadas, amplio ángulo de visión.
Para conectar la pantalla directamente a la placa Arduino se necesitó un
adaptador o shield (figura 51), el cual trabaja a 3.3 voltios y es compatible
tanto con la pantalla como con la placa y sus pines e interfaz de datos. Este
90
shield es un elemento ya diseñado por Arduino para facilitar la tarea de
conexión de pantallas hacia la placa.
Figura 51. Shield para TFT
(SainSmart, 2010)
3.3.1.3.
Panel touch
Para evitar el uso de un teclado externo, se utilizó un panel touch incluido en
la pantalla.
El panel táctil es un fino panel autoadhesivo colocado sobre la pantalla
gráfica. Es muy sensible a la presión de manera que un suave toque provoca
algunos cambios en la señal de salida. Está compuesto por dos láminas
rígidas transparentes, formando una estructura “sándwich” como la de la
figura 53, que tienen una capa resistiva que no excede de 1kΩ en sus caras
internas. Los lados opuestos de las láminas disponen de contactos para
acceder a un cable plano. Para determinar la parte del panel que se presiona
se deben encontrar las coordenadas X y Y.
91
Figura 52. Panel touch para GLCD 3.2”
Para determinar la coordenada X, se conecta el contacto izquierdo de la
superficie A a masa y el contacto derecho a la fuente de alimentación, esto
permite obtener un divisor de tensión presionando el panel táctil. La tensión
variará en el rango de 0 V a la tensión suministrada por la fuente de
alimentación y depende de la coordenada X. Si el punto está próximo al
contacto izquierdo de la superficie A, la tensión estará próxima a 0 V. Para la
determinación de la coordenada Y, se conecta el contacto inferior de la
superficie B a masa, mientras que el contacto superior se conecta a la fuente
de alimentación. En este caso, la lectura de la tensión se hará en el contacto
izquierdo de la superficie A (Reyes, 2008).
Figura 53. Estructura interna del panel táctil
(MikroElektronika, 2014)
92
3.3.1.4.
Sensor de revoluciones
Para obtener la velocidad a la cual gira el motor se utilizó un circuito en el
cual se incluye el uso de un sensor de encoder óptico (figura 54) y un disco
de encoder (figura 55), los cuales son los más utilizados en electrónica para
estas aplicaciones, además del uso en conjunto de la placa Arduino y la
pantalla GLCD.
Hay dos tipos principales de encoders: absoluto e incremental (relativo). La
salida de los encoders absolutos indica la posición actual del eje,
convirtiéndolos en transductores de ángulo. La salida de los encoders
incrementales, el cual es el tipo de encoder que se utilizó en este trabajo,
proporciona información sobre el movimiento del eje, lo cual suele ser
procesado adicionalmente en información como velocidad, distancia y
posición (Arduino, 2014).
El sensor está conformado por un optoacoplador, el cual es un dispositivo
mediante el cual se obtiene un acoplamiento óptico y a la vez un aislamiento
eléctrico; combina en una misma base un led que actúa de emisor y un
fotodetector.
Figura 54. Sensor de encoder con optoacoplador
93
Se acopló un disco ranurado al eje de salida del cigüeñal y se dispuso el
optoacoplador de tal manera que éste recepte el haz de luz al pasar por
cada ranura del disco, de esta manera se puede medir la frecuencia con la
que la señal es emitida y así determinar la velocidad a la que gira el motor.
Figura 55. Disco de encoder
3.3.1.5.
Variador de revoluciones
La velocidad de giro del motor eléctrico se controla gracias al circuito de
mosfet visualizado en la figura 56 y un control electrónico por programación,
el cual se encuentra detallado dentro del anexo #VI.
El mosfet sirve para restringir o permitir el paso de tensión en forma
controlada, mediante lo cual se varía el voltaje de entrada al motor para así
variar las rpm de 0 a 200 gracias a 2 botones; el rango de voltaje va de 0 a
24V.
94
Figura 56. Mosfet variador de tensión
3.3.2. ARMADO DEL CIRCUITO
Los circuitos necesarios en el proyecto, diseñados primeramente en Proteus,
fueron un circuito de mosfet (figura 57) para controlar la velocidad del motor
eléctrico y un circuito rectificador de corriente (figura 58) para el
transformador.
Además, se realizaron todas las conexiones de cada elemento hacia la placa
Arduino tal como lo muestra la figura 59, las cuales están determinadas
dentro de la misma programación (indica a qué pin va conectada cada señal
de entrada y salida).
Figura 57. Circuito mosfet para variación de tensión
95
Figura 58. Circuito transformador y rectificador de tensión
Figura 59. Conexión de elementos a la placa Arduino
96
3.3.3. PROGRAMACIÓN
El programa realizado para este proyecto tiene la función de recibir la señal,
leer y traducir los datos obtenidos mediante el sensor encoder y con esa
información
obtener,
mediante
las
fórmulas
correspondientes,
los
respectivos valores y gráficas de desplazamiento, velocidad y aceleración
del pistón en base al ángulo medido.
Además, determina el funcionamiento de la pantalla táctil y recibe y envía los
pulsos para controlar la variación de velocidad del motor eléctrico.
La programación en lenguaje y plataforma Arduino tiene varios elementos y
partes principales.
La parte de código representada como void setup() se ejecuta una sola vez
cuando comienza el programa. Es el método encargado de recoger la
configuración.
La función void loop() se ejecuta de forma ininterrumpida, una y otra vez.
Con este bucle se logra que el programa responda ante los distintos eventos
que se produzcan.
Las llaves { } delimitan bloques de código como funciones, sentencias if, etc,
marcando el comienzo y el fin del mismo.
El punto y coma se emplea para poner fin a una declaración, o limitar los
distintos elementos que constituyen un bucle for. (rDuinoStar, 2012).
El código completo del programa, así como la estructura del mismo, se
detallan en el Anexo #VI.
97
3.4. PRUEBAS DE FUNCIONOMIENTO
A lo largo de todo el tiempo que se estuvo desarrollando el proyecto, se
realizaron diversas pruebas para verificar el correcto funcionamiento de la
maqueta, las cuales se detallan en la tabla 6:
Tabla 6. Pruebas realizadas en la maqueta
PRUEBA
Alineación de
montaje
Movimiento manual
de mecanismo
Fugas
Movimiento con
motor eléctrico
Sujeción a la base
Funcionamiento de
sensores y circuitos
Efectividad de
programación
Obtención de
gráficas
1RA
2DA
3RA
O
P
P
O
P
P
O
P
P
O
O
P
P
P
P
P
P
P
O
P
P
O
P
P
(O) No pasa
(P) Pasa
Al finalizar el proyecto (costos del cual se encuentran detallados en el anexo
# VIII) se construyó un banco de pruebas funcional y didáctico, que es el que
se encuentra en la figura 60 y se puede observar más detalladamente en el
anexo # VII, en el cual se puede observar y entender de manera práctica la
98
influencia de parámetros cinemáticos en el diseño de un motor de
combustión interna alternativo y su mecanismo biela – manivela.
Figura 60. Maqueta terminada
Una vez terminada la maqueta, se realizaron las pruebas finales de
funcionamiento general, en las cuales se probó cómo trabaja el sistema
mecánico en conjunto con el software, obteniéndose los siguientes
resultados:
Primeramente se midió manualmente el desplazamiento del pistón en
función del ángulo girado por el cigüeñal, ubicando la longitud de la biela en
ℓ1 = 109 mm, y después se comparó los valores medidos con los valores
obtenidos por software; los datos recopilados son los de la tabla 7. Debido a
que la tolerancia de la escala para medición manual es de 1 mm mientras
que la tolerancia de las mediciones de software es de 0.01 mm, existen
pequeñas variaciones entre dichos valores.
99
Tabla 7. Datos de posiciones (x) del pistón en función del ángulo girado por
el cigüeñal (α) medidos manualmente y comparados con los obtenidos
mediante software
xmanual
xsoftware
(mm)
(°)
(mm)
0
0
0
4
30
3.87
14
60
13.97
27
90
26.62
387
120
37.96
46
150
45.43
48
180
48
47
210
46.46
39
240
38.02
28
270
26.70
15
300
14.04
4
330
3.92
0
360
0
El banco de pruebas permite variar las revoluciones del motor y el ángulo
girado por el cigüeñal, por lo cual las gráficas y los valores individuales que
se obtienen también varían en relación a este parámetro.
En este motor, para una velocidad angular de 200 rpm (elegida como
muestra) y valores de relación biela – manivela (
) de 0.22 y 0.21
obtenidos al variar ℓ en las 2 medidas establecidas (
), se calcularon los datos detallados en la tabla 8:
100
Tabla 8. Datos de la maqueta a 200 rpm obtenidos por software
Además, las gráficas obtenidas mediante el software son las visualizadas en
las figuras 61, 62 y 63.
La gráfica de desplazamiento muestra una curva simétrica en la que se
observa que para un ángulo del cigüeñal de 90º el pistón ha recorrido un
poco más de la mitad de su carrera y a los 180º (PMI) ya ha completado el
recorrido de ida por lo que desde ese punto comienza a descender hasta
llegar a 0 mm en los 360º (PMS).
Figura 61. Gráfica de desplazamiento obtenida por software
101
La gráfica de velocidad muestra cómo la velocidad máxima alcanzada por el
pistón se da antes de que el cigüeñal haya girado 90º mientras que a los
180º la velocidad es 0.
Figura 62. Gráfica de velocidad obtenida por software
La gráfica de aceleración muestra una curva en la que se observa que la
aceleración es máxima cuando el pistón está en su PMS (0º y 360º) mientras
que la aceleración mínima se da a los 180º, la aceleración es nula antes de
los 90º, lo cual coincide con el punto de máxima velocidad.
Figura 63. Gráfica de aceleración obtenida por software
102
4.
RESULTADOS
4.1. MANUAL
DE
USO
Y
FUNCIONAMIENTO
DE
LA
MAQUETA
Asegúrese de leer este manual antes de manipular la maqueta, incluida la
sección de precauciones y seguridad. La lectura de este manual le ayudará
a utilizar el equipo correctamente.
4.1.1. COMPONENTES DEL EQUIPO
La maqueta cuenta con las siguientes partes:
Cilindro, pistón, biela de longitud variable y cigüeñal de un motor de moto
Motor eléctrico con transformador, variador y cable para conexión a AC
Cadena de distribución
Cuatro (4) aumentos para bases del cilindro
Regla para medición de desplazamiento del pistón
Disco para medición de ángulo de giro del cigüeñal
Placa Arduino con pantalla GLCD y adaptador para conexión a AC
Sensor de rpm y de ángulo de giro (encoder)
4.1.2. PRECAUCIONES Y SEGURIDADES
Este es un equipo que consta de una parte mecánica y una parte
electrónica; se requiere de una manipulación cuidadosa de sus elementos,
además de los siguientes cuidados:
104
Sistema de control electrónico y eléctrico
Colocar la maqueta en un lugar seguro y estable.
No someterla a fuertes golpes.
No dejar a la intemperie.
Mantener limpios los elementos electrónicos.
No someter los cables a tensión o corte.
Sistema Mecánico
Aceitar las paredes del cilindro y demás partes móviles cada vez que se
va a utilizar la maqueta.
Purgar el aceite del cárter cada cierto tiempo para evitar impurezas que
puedan dañar el mecanismo.
Leer el manual de usuario antes de manipular el equipo.
4.1.3. ESQUEMA Y DESCRIPCIÓN DEL SISTEMA
Figura 64. Esquema de la maqueta y sus partes
105
•Sensor de rpm
•Botones variadores de rpm
•Botón touch para selección
de ℓ.
•Botones touch para variación
de .
Proceso
•Circuitos
•Programación
Entradas
•Control de velocidad
•Valor de rpm
•Ángulos
•Valores de x,v y a
•Gráficas
Salidas
Figura 65. Descripción del proceso de funcionamiento
4.1.4. ENCENDIDO Y APAGADO
Encendido
Primero, conectar el adaptador de la placa Arduino y el transformador del
motor eléctrico a una toma de corriente de 110V.
Activar el switch para encender el motor.
Empezar a subir o bajar las rpm del motor utilizando los botones asignados.
Apagado
Al finalizar las prácticas, desactivar el switch del motor y desconectar todo el
sistema eléctrico.
106
4.1.5. MANEJO DEL PROGRAMA
Al momento de encender la placa Arduino, la pantalla de inicio (figura 66)
pide presionar el botón [Sel], el cual cambia la gráfica que se va a visualizar:
permite ver gráficas de desplazamiento, velocidad y aceleración del pistón.
Figura 66. Pantalla de inicio
El botón [Drw] se emplea en el caso de que se necesite resetear la gráfica
dinámica para evitar la doble línea que se puede formar al variar las rpm.
El botón de Longitud [L] permite cambiar dicho parámetro para efectos de
cálculos y gráficas; se puede escoger trabajar con L1=109mm o L2=114mm.
El programa también indica f(x) que es el valor de desplazamiento, velocidad
o aceleración del pistón correspondiente al ángulo indicado, el cual varía
utilizando los botones [+] y [–].
En la pantalla se puede visualizar las rpm a las que está girando el motor,
las cuales son variables gracias a los botones físicos indicados en la figura
67.
107
Figura 67. Botones variadores de rpm
4.1.6. UTILIZACIÓN DE LA MAQUETA MEDIANTE FUNCIONAMIENTO
MANUAL
La escala de desplazamiento y el disco de ángulo de giro están ubicados
para efectos de cálculo de desplazamiento del pistón sin utilizar el software.
Para esto debe estar desconectado todo el sistema por motivos de
seguridad. Luego se fija la longitud de la biela en el valor que se quiera
trabajar (máximo o mínimo), aflojando los tornillos hasta que se pueda
modificar este parámetro y volviendo a ajustarlos bien.
El motor se debe girar en sentido horario, moviendo el disco graduado en
este sentido.
Observar a qué valor de desplazamiento en la escala corresponde el ángulo
girado en el disco (debido al juego existente en el giro del cigüeñal, para una
mejor medición se debe fijar el ángulo y después mover el disco un poco a la
izquierda).
La escala tiene una tolerancia de 1mm y el disco de 30º.
Se puede comprobar estos valores utilizando el software, lo cual tiene un
margen de error de ± 0.05 mm.
108
4.1.7. PRUEBAS DE TALLER
En la maqueta se pueden realizar las siguientes pruebas:
Medición manual del desplazamiento del pistón con respecto al ángulo
girado por el cigüeñal.
Obtención, mediante software, de valores de desplazamiento, velocidad y
aceleración en relación al ángulo girado por el cigüeñal.
Obtención de gráficas de desplazamiento, velocidad y aceleración del
pistón.
Variación de las rpm del motor.
Variación de la relación biela – manivela (factor λ), variando la longitud de
la biela.
109
4.3. GUÍAS PARA PRÁCTICAS EN EL TALLER
UNIVERSIDAD TECNOLÓGICA EQUINOCCIAL
FACULTAD DE CIENCIAS DE LA INGENIERÍA
INGENIERÍA AUTOMOTRIZ
Autor: Juliana Reyes
Fecha: Enero-2015
PRÁCTICA Nº 01
“COMPORTAMIENTO DEL DESPLAZAMIENTO DEL PISTÓN
DE UN MOTOR DE COMBUSTIÓN INTERNA”
1. OBJETIVOS
Objetivo General:
Medir y determinar de manera práctica la posición del pistón y comprender la
influencia de este parámetro cinemático en el diseño y funcionamiento del
motor.
Objetivos Específicos:
Medir la posición del pistón mediante el funcionamiento manual.
Obtener los datos y las gráficas de posición del pistón con las 2
diferentes medidas de la longitud de biela.
Comparar el comportamiento de las gráficas obtenidas.
Determinar y analizar las variaciones en dichas gráficas.
2. BASES CONCEPTUALES
Cinemática del Motor.- Analiza el movimiento de los elementos del motor (sin
considerar las fuerzas que actúan sobre este).
Posición del Pistón.- Es la localización del pistón en cada punto que recorre
durante su trayectoria.
110
Factor Lambda.- Es la relación entre el radio de la manivela y la longitud de
la biela.
3. MATERIAL
Maqueta
4. MÉTODO
Medir manualmente la posición en función al ángulo girado, moviendo
el disco graduado en sentido horario y observando el desplazamiento
en la escala.
Conectar el motor eléctrico y el módulo de control Arduino.
Encender el switch del motor eléctrico.
Escoger en la pantalla la gráfica que se quiere visualizar
(desplazamiento).
Definir el valor de ℓ con el que se va a trabajar.
Con los botones correspondientes, empezar a variar las rpm del
motor.
Variar los ángulos para determinar los valores de posición
correspondientes.
Observar los cambios en las gráficas y en los valores al variar tanto
las rpm como el valor de ℓ.
Apagar todo el sistema.
Anotar todos los datos y sacar conclusiones.
5. CUESTIONARIO DE INVESTIGACIÓN
Describa los cambios en las gráficas en base a la variación del factor
lambda.
Describa los cambios en las gráficas en base a la variación de las rpm
del motor.
¿Qué ángulo ha girado el cigüeñal cuando el pistón está en la mitad
de su carrera?
6. BIBLIOGRAFÍA
Payri, F., & Desantes, J. M. (2011). Motores de Combustión Interna
111
Alternativos. Valencia: Reverté.
Porras, A., & Soriano, M. L. (s.f.). Universidad de Castilla - La
Mancha.
Recuperado
el
10
de
diciembre
de
2012,
de
http://www.uclm.es/profesorado/porrasysoriano/motores/temas/cinem
atica_y_dinamica.pdf
UNIVERSIDAD TECNOLÓGICA EQUINOCCIAL
FACULTAD DE CIENCIAS DE LA INGENIERÍA
INGENIERÍA AUTOMOTRIZ
Autor: Juliana Reyes
Fecha: Enero-2015
PRÁCTICA Nº 02
“COMPORTAMIENTO DE LA VELOCIDAD DEL PISTÓN DE
UN MOTOR DE COMBUSTIÓN INTERNA”
1. OBJETIVOS
Objetivo General:
Determinar de manera práctica la velocidad del pistón y comprender la
influencia de este parámetro cinemático en el diseño y funcionamiento del
motor.
Objetivos Específicos:
Obtener los datos y las gráficas de velocidad del pistón con las 2
diferentes medidas de la longitud de biela.
Comparar el comportamiento de las gráficas obtenidas.
Determinar y analizar las variaciones en dichas gráficas.
2. BASES CONCEPTUALES
Cinemática del Motor.- Analiza el movimiento de los elementos del motor (sin
112
considerar las fuerzas que actúan sobre este).
Velocidad del Pistón.- Expresa el desplazamiento del pistón en función del
tiempo empleado.
Velocidad Angular del Motor (ω).- Es el régimen (revoluciones por minuto) al
cual opera el motor.
Factor Lambda.- Es la relación entre el radio de la manivela y la longitud de
la biela.
3. MATERIAL
Maqueta
4. MÉTODO
Conectar el motor eléctrico y el módulo de control Arduino.
Encender el switch del motor eléctrico.
Escoger en la pantalla la gráfica que se quiere visualizar (velocidad).
Definir el valor de ℓ con el que se va a trabajar.
Con los botones correspondientes, empezar a variar las rpm del
motor.
Variar los ángulos para determinar los valores de velocidad
correspondientes.
Observar los cambios en las gráficas y en los valores al variar tanto
las rpm como el valor de ℓ.
Anotar todos los datos y sacar conclusiones.
Apagar todo el sistema.
5. CUESTIONARIO DE INVESTIGACIÓN
Describa los cambios en las gráficas en base a la variación del factor
lambda.
Describa los cambios en las gráficas en base a la variación de las rpm
del motor.
¿Qué ángulo ha girado el cigüeñal en el momento en el que la biela y
la manivela están perpendiculares?
¿Cuál es la velocidad máxima del pistón?
113
¿Cuál es el valor máximo del ángulo β?
¿Cuál es la velocidad máxima de diseño de un pistón y por qué?
6. BIBLIOGRAFÍA
Payri, F., & Desantes, J. M. (2011). Motores de Combustión Interna
Alternativos. Valencia: Reverté.
Porras, A., & Soriano, M. L. (s.f.). Universidad de Castilla - La
Mancha.
Recuperado
el
10
de
diciembre
de
2012,
de
http://www.uclm.es/profesorado/porrasysoriano/motores/temas/cinem
atica_y_dinamica.pdf
UNIVERSIDAD TECNOLÓGICA EQUINOCCIAL
FACULTAD DE CIENCIAS DE LA INGENIERÍA
INGENIERÍA AUTOMOTRIZ
Autor: Juliana Reyes
Fecha: Enero-2015
PRÁCTICA Nº 03
“COMPORTAMIENTO DE LA ACELERACIÓN DEL PISTÓN DE
UN MOTOR DE COMBUSTIÓN INTERNA”
1. OBJETIVOS
Objetivo General:
Determinar de manera práctica la aceleración del pistón y comprender la
influencia de este parámetro cinemático en el diseño y funcionamiento del
motor.
Objetivos Específicos:
Obtener los datos y las gráficas de aceleración del pistón con las 2
diferentes medidas de la longitud de biela.
114
Comparar el comportamiento de las gráficas obtenidas.
Determinar y analizar las variaciones en dichas gráficas.
2. BASES CONCEPTUALES
Cinemática del Motor.- Analiza el movimiento de los elementos del motor (sin
considerar las fuerzas que actúan sobre este).
Aceleración del Pistón.- Es el ritmo con el que cambia la velocidad del
pistón.
Velocidad Angular del Motor (ω).- Es el régimen (revoluciones por minuto) al
cual opera el motor.
Factor Lambda.- Es la relación entre el radio de la manivela y la longitud de
la biela.
3. MATERIAL
Maqueta
4. MÉTODO
Conectar el motor eléctrico y el módulo de control Arduino.
Encender el switch del motor eléctrico.
Escoger en la pantalla la gráfica que se quiere visualizar
(aceleración).
Definir el valor de ℓ con el que se va a trabajar.
Con los botones correspondientes, empezar a variar las rpm del
motor.
Variar los ángulos para determinar los valores de posición, velocidad
o aceleración.
Observar los cambios en las gráficas y en los valores al variar tanto
las rpm como el valor de ℓ.
Anotar todos los datos y sacar conclusiones.
Apagar todo el sistema.
5. CUESTIONARIO DE INVESTIGACIÓN
Describa los cambios en las gráficas en base a la variación del factor
lambda.
115
Describa los cambios en las gráficas en base a la variación de las rpm
del motor.
¿Cuál es la aceleración máxima?
¿Cuál es la aceleración mínima?
6. BIBLIOGRAFÍA
Payri, F., & Desantes, J. M. (2011). Motores de Combustión Interna
Alternativos. Valencia: Reverté.
Porras, A., & Soriano, M. L. (s.f.). Universidad de Castilla - La
Mancha.
Recuperado
el
10
de
diciembre
de
2012,
de
http://www.uclm.es/profesorado/porrasysoriano/motores/temas/cinem
atica_y_dinamica.pdf
116
4.4. ANÁLISIS DE RESULTADOS
En base a los datos obtenidos mediante el banco de pruebas, los cuales se
encuentran detallados en las tablas 7 y 8, y explicados en el capítulo 3.4, se
obtuvieron los siguientes resultados con respecto a los parámetros
cinemáticos y geométricos de un motor.
4.4.1. DESPLAZAMIENTO, VELOCIDAD Y ACELERACIÓN
Se demostró que la variación de la velocidad angular del motor no afecta al
desplazamiento del pistón, mientras que sí lo hace sobre la velocidad y la
aceleración del mismo.
Por otro lado, al modificar la geometría del mecanismo biela-manivela
variando la longitud de la biela, se observa que el desplazamiento también
cambia su relación de variación; es decir que mientras más corta es la biela
menos tiempo se demora en realizar el recorrido de bajada, por lo que se
tiene un motor más eficiente en los tiempos de admisión y trabajo.
La velocidad máxima del pistón, tomando en cuenta los parámetros
cinemáticos únicamente, está determinada por la geometría del mecanismo
biela – manivela, y la longitud de la biela está limitada por razones
constructivas ya que ésta debe ser como mínimo mayor al radio de la
manivela. Al aumentar la velocidad media crecen también las aceleraciones
lo cual tiene efectos dinámicos sobre los pistones que pueden provocar
roturas.
4.4.2. RELACIÓN BIELA – MANIVELA (FACTOR λ)
En base a las pruebas de funcionamiento, se determinó que mientras mayor
es el factor lambda, la velocidad máxima del pistón está más cerca de
=90°.
Después de la observación del funcionamiento de la maqueta y del análisis
de los datos obtenidos, se comprobó que la relación biela–manivela
determina la forma de la evolución del movimiento del pistón con respecto al
giro del cigüeñal; esto define y condiciona la transformación entre el
movimiento alternativo del pistón y el rotativo del cigüeñal.
Estos datos son muy útiles no solo al momento de diseñar un nuevo motor,
sino también para modificar motores ya existentes mejorando así su
rendimiento. Para esto es necesario poner mucha atención a cada
parámetro geométrico y cinemático dependiendo del resultado que se quiere
obtener, ya que cada modificación afectará al funcionamiento en conjunto
del motor.
4.4.3. CINEMÁTICA Y MECANISMO BIELA - MANIVELA
Los parámetros geométricos del mecanismo biela – manivela influyen
directamente en la velocidad alcanzada por el pistón; los problemas que
aparecen por una elevada velocidad del pistón afectan sobre todo a la
lubricación de los cilindros y a la selección de materiales (tanto para los
cilindros como para los pistones) que deben ser resistentes especialmente al
desgaste.
5.
CONCLUSIONES Y RECOMENDACIONES
5.1. CONCLUSIONES
Estudiar el mecanismo biela – manivela desde el punto de vista
cinemático;
es
decir,
determinar
las
posiciones,
velocidades
y
aceleraciones de sus diferentes puntos, sirve como un paso previo para
realizar el estudio dinámico, en el cual se determinan las fuerzas y
momentos aplicados sobre los distintos componentes del motor. A su vez,
la dinámica sirve de base para realizar cálculos de resistencia mecánica
de componentes, fricción, lubricación, vibraciones y equilibrado del motor.
Cuanto menor sea λ, menor será la fuerza lateral del pistón sobre la pared
del cilindro, con lo que se puede reducir la falda del mismo y así su masa;
por otro lado aumenta la longitud de la biela y con ello su masa, que al
estar sometida a un movimiento alternativo provoca un aumento de las
fuerzas de inercia. Si se reduce estas fuerzas disminuyendo la longitud de
la biela, λ aumenta y las fuerzas laterales del pistón sobre el cilindro
también.
Si se busca variar la geometría del motor reduciendo el radio de la
manivela se obtendrá un motor con carrera corta, el cual admite girar a
elevadas rpm sin que el pistón suba excesivamente de velocidad; esto
permite disponer de buena potencia, sin embargo el reducido codo del
cigüeñal no ofrece elevados valores de par a bajas y medias rpm.
El análisis previo, tanto de materiales como de diseño y funcionamiento,
facilitó el desarrollo del trabajo al evitar reprocesos y gastos innecesarios.
Al realizar la maqueta, se mejoraron las destrezas en el uso de máquinas
y herramientas, así como se profundizaron los conocimientos sobre
electricidad, electrónica y programación básica.
120
Se determinó que para accionar sistemas mecánicos en los que se
requiera trabajar con variación de velocidades y buen torque es necesario
utilizar motores de corriente continua, preferentemente con caja
reductora.
Debido a la poca variación en el factor λ, las diferencias en los valores de
posición, velocidad y aceleración no son perceptibles en las gráficas; sin
embargo sí se puede apreciar en los valores obtenidos por cálculo.
En base a las pruebas de funcionamiento, se demostró la construcción de
un sistema amigable con el usuario, el cual facilita su uso en prácticas y
mejora la comprensión de la importancia de la cinemática dentro del
diseño, construcción y modificación de un MCIA, así como también
constituye un paso previo al estudio de su influencia dentro de la
dinámica.
121
5.3. RECOMENDACIONES
Las variaciones en la aceleración de los mecanismos del motor producen
en éste fuerzas y vibraciones que son necesarias considerar. En el
estudio dinámico y en el equilibrado se deben tomar en cuenta las fuerzas
de inercia de las masas en movimiento, por lo que influye aquí la
velocidad y aceleración del mecanismo biela – manivela.
Manipular con cuidado el equipo, y hacerlo después de haber recibido los
conocimientos teóricos necesarios sobre cinemática del motor,
para
evitar daños en el sistema de control electrónico y en el sistema
mecánico, y de esta manera evitar la causa de accidentes por mala
manipulación.
Como complemento al proyecto realizado se sugiere la ejecución de un
proyecto enfocado a la dinámica del motor para poder medir las fuerzas
ejercidas durante su funcionamiento.
Los parámetros cinemáticos de un motor son importantes no solo en el
diseño, sino también en el trucaje de motores, por lo que es importante
tener en cuenta la influencia de la modificación de la geometría del
mecanismo en la dinámica, el funcionamiento y la resistencia de los
materiales a los esfuerzos del motor.
122
ANEXOS
124
125
126
127
128
ANEXO # VI
PROGRAMA EN ARDUINO
Primero se debe llamar e inicializar las librerías que se van a activar:
Después se declaran (crean) las variables:
129
Se inician las subrutinas:
130
Y se empieza a ejecutar el programa principal:
131
132
133
134
135
136
137
ANEXO # VII
MAQUETA TERMINADA (VARIAS VISTAS)
138
ANEXO # VIII
COSTOS DEL PROYECTO
Rubro
USD($)
Cigüeñal, biela, pistón y 75
cilindro de motor Suzuki
GN125
Motor eléctrico
Piñón
y
100
cadena
de 25
distribución
Placas de acero
Arduino
Mega,
20
pantalla 90
GLDC con touch y shield
Bocines,
portabocines
y 85
retenedores
Utilización de equipos para 20
corte, doblado y soldadura
Pernos y tuercas
10
Sensor, material para los 80
circuitos
eléctricos
y
electrónicos
Programación
650
Total:
1155
139
NOMENCLATURA
Símbolos Genéricos
aceleración
m/s2
distancia
m
F
fuerza
N
T
Torque
N.m
régimen de giro
rpm
Potencia
W, HP
tiempo
s
velocidad
m/s
posición
m, mm
P
Δ
incremento
η
rendimiento
ω
velocidad angular
rad/s
Símbolos Específicos
Ap
área del pistón
cm2
140
D
diámetro del cilindro
mm
desplazamiento del eje del bulón con respecto al eje del cigüeñal
relación de transmisión
descentrado relativo del pistón
ℓ
longitud de la biela
mm
radio de la manivela del cigüeñal
mm
S
carrera del pistón
mm
S/D
relación carrera – diámetro
Vc
volumen de la cámara de combustión
cm3
Vh
cilindrada unitaria
cm3
VH
cilindrada total
cc, lt
número de cilindros
α
ángulo girado por el cigüeñal
°
β
oblicuidad de la biela
°
ε
relación de compresión
θ
ángulo formado entre la biela y la manivela
λ
proporción biela – manivela
°
Siglas
ASTM
(American Society for Testing and Materials)
141
GLCD
pantalla gráfica de cristal líquido
GMAW
soldadura por arco metálico bajo gas protector
MAG
soldadura con gas activo
MCIA
motor de combustión interna alternativo
MEC
motor de encendido por compresión
MEP
motor de encendido provocado
MIG
soldadura bajo gas inerte
PMI
punto muerto inferior
PMS
punto muerto superior
PWM
modulación por ancho de pulsos
SOHC
árbol de levas en el cabezote
TFT
pantalla de transistor de película delgada
UARTS
puertos serie por hardware
142
BIBLIOGRAFÍA
Arduino. (2010). Arduino. Recuperado el 10 de noviembre de 2013, de
http://www.arduino.cc/es/
Arduino. (2014). Rotary Encoders. Recuperado el 12 de mayo de 2014, de
http://playground.arduino.cc/Main/RotaryEncoders
ASTM. (2006-2013). ASTM International. Recuperado el 30 de septiembre
de 2013, de http://www.astm.org/
AWS. (2013). American Welding Society. Recuperado el 10 de noviembre de
2013, de http://www.aws.org/w/a/
Bosch. (2010). Tecnología del Automóvil de Bosch. Recuperado el 25 de 06
de 2013, de http://www.boschautomotivetechnology.com/es/com/home/homepage_com.html
Bosch GmbH, Robert. (2005). Manual de la Técnica del Automóvil (4ta ed.).
Alemania: Bosch.
Cabrera, G. (09 de abril de 2013). Aprendemos Tecnología. Recuperado el
04 de mayo de 2013, de http://aprendemostecnologia.org/
Cardona Foix, S., & Clos Costa, D. (2001). Teoría de Máquinas. Barcelona:
UPC.
Datasheet. (2013). Datasheet Archive. Recuperado el 10 de noviembre de
2013, de http://www.datasheetarchive.com/
Díaz del Castillo Rodríguez, F. (2008). Lab. de Tecnología de Materiales
Unam. Recuperado el 18 de julio de 2013, de Materiales y sus
Propiedades:
http://olimpia.cuautitlan2.unam.mx/pagina_ingenieria/mecanica/mat/m
at_mec/m1/materiales_1.pdf
143
Dpto. de Tecnología Cejarosu. (2005). MecanEso. Recuperado el 04 de
mayo de 2013, de
http://concurso.cnice.mec.es/cnice2006/material107/
Dpto. de Tecnología Cejarosu. (2006). Tecnología y TIC en la Enseñanza
Secundaria. Recuperado el 01 de mayo de 2013, de
http://concurso.cnice.mec.es/cnice2006/material107/imprenta/Textos/t
x_maquinas.pdf
Dpto. de Tecnología de Aragón. (2009). Recuperado el 27 de marzo de
2013, de
http://tecnologiamolina.webcindario.com/Tema%203%20Mecanismos
%20y%20maquinas.pdf
Fueltech. (2013). Fueltech. Recuperado el 09 de mayo de 2013, de
http://www.fueltech.net/es
Giancoli, D. C. (2002). Física para Universitarios (3ra ed.). Prentice Hall.
González Fernández, C. F. (2009). Fundamentos de Mecánica. Barcelona:
Reverté.
Grupo de Investigación de Ingeniería Mecánica Aplicada y Computacional.
(2006). Universidad Pública de Navarra - Dpto. de Ingeniería
Mecánica, Energética y de Materiales. Recuperado el 30 de abril de
2013, de
http://www.imac.unavarra.es/web_imac/pages/docencia/asignaturas/t
m/pdfdoc_th/apuntes/
GTZ. (1985). Tecnología del Automóvil - Tomo 1 (Vol. 1). Barcelona:
Reverté.
GTZ. (1985). Tecnología del Automóvil - Tomo 2 (Vol. 2). Barcelona:
Reverté.
GTZ. (1986). Matemática Aplicada para la Técnica del Automóvil. Barcelona:
Reverté.
144
GTZ. (1986). Tablas de la Técnica del Automóvil. Barcelona: Reverté.
Industrias GM. (2013). Pintura Electrostática. Recuperado el 16 de abril de
2014, de
http://www.igm.mex.tl/imagesnew2/0/0/0/0/1/6/9/7/5/8/Pintura%20Elec
trostatica.pdf
MCBtec. (12 de enero de 2008). El Encoder. Recuperado el 16 de abril de
2014, de http://www.mcbtec.com/pdf/Funcionamiento_Encoder.pdf
Mecánica Virtual. (2013). Aficionados a la Mecánica. Recuperado el 23 de
octubre de 2013, de Términos Utilizados para el Estudio del Motor:
http://www.aficionadosalamecanica.net/cur_mec_cilindrada.htm
MecánicaMotor. (2012). Mecánica y Motores. Recuperado el 14 de mayo de
2013, de http://www.mecanicaymotores.com/el-ciclo-otto.html
Microchip Technology Inc. (2007). Microchip. Recuperado el 10 de
noviembre de 2013, de
http://ww1.microchip.com/downloads/en/devicedoc/40044f.pdf
MikroElektronika. (2014). MikroElektronika. Recuperado el 27 de mayo de
2014, de http://www.mikroe.com
Norton, R. L. (2009). Diseño de Maquinaria: Síntesis y Análisis de Máquinas
y Mecanismos (4ta ed.). Editorial McGraw-Hill.
Orovio Astudillo, M. (2010). Tecnología del Automóvil. Madrid, España:
Paraninfo.
Payri, F., & Desantes, J. M. (2011). Motores de Combustión Interna
Alternativos. Valencia: Reverté.
Porras, A., & Soriano, M. L. (2011). Universidad de Castilla - La Mancha.
Recuperado el 10 de diciembre de 2012, de
http://www.uclm.es/profesorado/porrasysoriano/motores/temas/cinem
atica_y_dinamica.pdf
145
rDuinoStar. (18 de octubre de 2012). Estructura de un Sketch. Recuperado
el 21 de enero de 2014, de
http://rduinostar.com/documentacion/programacionarduino/estructura-de-un-sketch/
Real Academia Española. (2001). Diccionario de la Lengua Española (22da
ed.).
Reuleaux, F. (1875). Kinematics of Machinery.
Reyes, C. A. (2008). Microcontroladores PIC Programación en Basic (3ra
ed., Vol. 1). Quito: Rispergraf.
Rowe, R., & Jeffus, L. (2008). Manual de Soldadura GMAW (MIG-MAG).
Madrid: Paraninfo.
SainSmart. (2010). SainSmart. Recuperado el 28 de mayo de 2014, de
http://www.sainsmart.com/
Santillana. (2013). Kalipedia. Recuperado el 28 de 07 de 2013, de
http://www.kalipedia.com/tecnologia/tema/mecanismostransformacion.html?x=20070822klpingtcn_62.Kes
Sherwin - Williams Company. (2013). Pinturas Cóndor. Recuperado el 12 de
01 de 2014, de
http://mail.pinturascondor.com/Aplicaciones/documentosMSDS.nsf/6f6
c895bd8b956e8052577c9005d1461/306d0ce27a7b43b605257a6b00
629eb7?OpenDocument
Shigley, J., & Uicker, J. (2001). Teoría de Máquinas y Mecanismos. México:
McGraw-Hill.
Universidad Politécnica de Cataluña. (2005). Motores Alternativos de
Combustión Interna. Barcelona: UPC.
Wikipedia. (02 de diciembre de 2011). Wikipedia. Recuperado el 10 de
marzo de 2013, de http://www.wikipedia.org/
146