2 OBJETIVOS, SOLUCIÓN Y JUSTIFICACIÓN
Anuncio

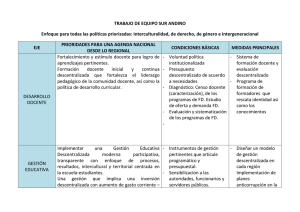
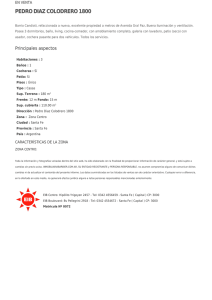
2 OBJETIVOS, SOLUCIÓN Y JUSTIFICACIÓN 2.1 PUNTO DE PARTIDA Y OBJETIVOS. El objetivo será el siguiente: Partiendo de esta simple instalación, se desea controlar el encendido y apagado automático de las luces, mediante el uso de un programa de ordenador. Por medio del TS2 podrá controlarse el encendido y apagado manual, sin embargo, se desea ampliar esta capacidad mediante un control automático, en el que la bombilla pueda encenderse y apagarse cuando se estime oportuno, así como también se desea programar su funcionamiento y por extensión, pueda hacerse lo mismo con cualquier otro dispositivos cuya funcionalidad sea on/off. Lo que se desea es el poder controlar dispositivos comunes como, luces, persianas, electrodomésticos, etc, mediante dispositivos domóticos. Para ello, construiremos una plataforma software que nos permitirá realizar este control de una forma intuitiva y sencilla. Ésta última características (permitir hacer un control centralizado de una forma lo suficientemente sencilla e intuitiva, que cualquier persona, por inexperta que sea, se vea capaz de usar la domótica y el software) será la que diferencia nuestro proyecto de otros. Partimos de una serie de dispositivos domóticos que siguen el estándar EIB, que como veremos en el ultimo punto de este capítulo, es totalmente compatible con KNX, sistema que agrupa a los tres más utilizados en Europa. Los dispositivos tienen capacidad de actuación propia, ya que EIB es un sistema distribuido, en el que una vez configurados los equipos, estos podrán interactuar unos con otros de forma autónoma, sin necesidad de una unidad central que vigile el correcto funcionamiento de todos ellos. El sistema EIB que se va montar es el sistema más simple que se pueda tener. Así, constará de una única línea, a la que se conectarán los diferentes equipos. Además, se partirá de unos conmutadores on/off y un interfaz adaptador para conmutadores normales (interruptores de la luz normales y corrientes). Según esto, los elementos necesarios para el montaje serán: Elementos EIB ● Una fuente de alimentación, para los dispositivo del bus. ● Una interfaz RS-232, para configurar inicialmente los dispositivos con un PC normal. ● Conmutadores sobre los que actuar. ● Interfaz adaptador para interruptores normales. ● Cable bus. Elementos eléctricos comunes. ● Cable serie, para comunicación con el PC. ● Cable de alimentación normal. Página 1 de 7 ● Bombillas. ● Interruptor de pared normal. En la instalación que se pretende montar, al ser tan simple, no necesitará de ningún tipo de acoplador, ya que solamente se va a tener una línea EIB. Los dispositivos de los que se parte son: El NTA6F16H+COM. Este dispositivos son tres dispositivos en uno. Tiene las funcionalidades de fuente de alimentación, interfaz serie RS-232 y conmutador en un sólo dispositivos , puede verse en la figura 3.1 y su fabricante el Lingg & Janke. Posee seis conmutadores dobles, por lo que en realidad se le podrán conectar 12 elementos cuya funcionalidad sea apagado/encendido. Sin embargo, el numero de direcciones de grupo que se le podrá asignar, es el número de conmutadores diferentes (Un total de 6). Como es un único equipo, la dirección física es única, pero podrá tener seis direcciones de grupo para direccionar sus conmutadores on/off de forma independiente. La interfaz RS-232, es una interfaz serie de nueve pines con un conector hembra. Esta interfaz serie, nos va a permitir configurar inicialmente el sistema, haciendo uso de un software preparado para esta tarea. Además, a través de esta conexión, vamos a poder mandar comandos EIB a los diferentes dispositivos de la instalación, pudiendo de esta forma interactuar con dichos elementos. En cuanto a la fuente de alimentación, es una fuente de 24 V y 16 A y nos permitirá alimentar los equipos EIB, que hay en nuestra instalación. La hoja de catalogo con las características funcionales y eléctricas, se incluyen como parte del pliego de condiciones. Conexión a alimentación: negativo, fase y neutro Interruptor de reset Conexión para los dispositivos físicos. Relés Puerto RS-232 Botón de programación de la parte interface. Leds de muestra de encendido, reset y apagado. Conexión al bus Botón de programación sistema de relés. Figura 2.1: Dispositivo NTA6F16H+COM. Página 2 de 7 Interfaz TS2. El interfaz TS2, es un dispositivo que se encargará de adaptar un interruptor normal al bus EIB. Nosotros poseemos un interruptor normal, para que éste pueda actuar sobre la bombilla conectada a uno de los conmutadores, ha de conectarse al bus y no a la corriente eléctrica. Por tanto, será necesario un interfaz de este tipo para hacer esta adaptación. Con esta configuración, podremos encender la bombilla de forma manual como si estuviera conectada a la red eléctrica. Su fabricante es Lingg & Janke y la figura 3.2 muestra este dispositivo. Canal B Canal A Botón de programación Conexión al bus Figura 2.2: Dispositivo TS2. El TS2 puede adaptar dos interruptores, es decir, tendrá dos canales, por lo que se le podrán asignar dos direcciones de grupo. Sin embargo, al igual que el NTA6F16H+COM tendrá una única dirección física. La hoja de catálogo con las características funcionales y eléctricas de este dispositivos, se incluyen como parte del pliego de condiciones. 2.1 SISTEMA COMPLETO: SOLUCIÓN APORTADA. En la siguiente figura se muestra un esquema del sistema completo, así como, algunas de las posibles ampliaciones las cuales se tratarán en un apartado posterior, Página 3 de 7 Figura 2.3: Esquema del sistema a desarrollar. Por un lado tendremos los elementos descritos en el apartado anterior. Estos habrán de ser programados con un software llamado ETS, tal y como se muestra en el anexo2. Esta programación inicial permitirá que estos funcionen de la misma manera que funcionarían en una instalación normal (la luz se encendería y apagaría manualmente con el interruptor). Este software también configura los dispositivos según unos parámetros específicos y permite actuar sobre ellos de manera automática. Sin embargo, ninguno de estos pasos es intuitivo ni mucho menos sencillo. Un claro ejemplo de esto se muestra en el anexo2. Por otro lado, tendremos un sistema llamado LINCE el cual no es más que un ordenador normal con una interfaz red y una interfaz serie. Su principal característica es que posee un sistema linux empotrado. Recibe este nombre porque el sistema que incorpora es un sistema linux que ocupa muy poco espacio y se descarga sobre una memoria flash al arrancarse. La interfaz serie del LINCE se conectará al dispositivo NTA6F16H+COM tras de haber sido configurados todos los dispositivos con el software ETS. En este dispositivo lo que habrá será uno o varios programas. Estos programas actuarán sobre los dispositivos utilizando unas librerías especiales capaces de interactuar con elementos que siguen el estándar EIB. El sistema LINCE se conectará a otro PC mediante la interfaz red. En este segundo PC habrá un programa software con una interfaz gráfica muy intuitiva y sencilla de manejar. Esta GUI actuará sobre el equipo LINCE mediante comandos SSH el cual, a su vez, actuará sobre los dispositivos domóticos. Lo visto hasta ahora es el esquema al que responde el proyecto y que es desarrollado Página 4 de 7 a lo largo de este documento. El trabajo a desempeñar consiste en configurar los dispositivos con el software ETS, buscar unas librerías de libre distribución que permitan actuar sobre equipos EIB y por último, crear un software con una interfaz gráfica muy intuitiva que actúe sobre dichos dispositivos. En siguientes apartados se explicará como se han desarrollado cada una de las tareas y las soluciones aportadas para cada uno de los problemas que acontecieron. La arquitectura EIB es una arquitectura distribuida en la que cada elemento está dotado de una inteligencia y es capaz de realizar una serie de acciones, independientemente del resto de dispositivos que haya en la instalación. Esta característica, que distingue al sistema EIB de otros, se seguirá manteniendo en el esquema que aquí se propone. Sin embargo, se dotará al sistema de unas capacidades centralizadas en un PC. Esto, lejos de restarle propiedades al sistema EIB, lo dota de una ventaja fundamental. Y es que al igual que sucede con los mandos a distancia en las casas, los usuarios de los sistemas domóticos prefieren de un control centralizado, el cual permita ejecutar una serie de funciones de forma sencilla e intuitiva, a un sistema en el que las capacidades estén distribuidas a lo largo de toda la instalación. Dicho de otro modo, los usuarios prefieren un mando a distancia que controle todos los aparatos del hogar, antes que siete mandos uno para cada equipo. Además, si el elemento centralizador dejara de funcionar en nuestra instalación los elementos domóticos seguirían cumpliendo su funcionalidad manual y solamente ciertas funciones, las propias del software desarrollado, se perderían. 2.3 JUSTIFICACIÓN DE LA SOLUCIÓN. Al comienzo del proyecto se decidió buscar unas librerías para dispositivos EIB. Se pretendía que estas librerías pasaran comandos simples a comandos EIB y los enviaran por el puerto serie. Posteriormente, lo que se haría sería eliminar el uso de estos comandos simples y sustituirlos por un entorno gráfico. Dicho entorno incorporaría nuevas funcionalidades.. De la misma manera, se buscarían librerías para otros estándares como X10, LonWorks o Cebus y se unificarían en un único entorno gráfico, de tal forma que, se aunarían varios estándares con un único software de control. Según esto, parece lógico tratar de implementar todo el sistema en un único dispositivo y con un único lenguaje de programación. Sin embargo, los acontecimientos acaecidos al comienzo del proyecto provocaron que el sistema se implementara de la forma vista en el apartado anterior (Dos equipos diferentes y varios softwares independientes). Tras una larga búsqueda para encontrar las librerías que permitieran actuar sobre dispositivos EIB se encontraron unas librerías que cumplían con las características deseadas. Sin embargo, estas librerías no eran útiles ya que si bien eran para dispositivos EIB, estos dispositivos debían de tener una BCU del tipo 21. El estándar EIB define varios tipos de interfaces físicas, es decir, varios tipos de PEI. Estos tipos de PEI van a diferenciar entre dos tipos de BCU, la BCU1 y la BCU2. El funcionamiento de estas unidades de acoplamiento al bus es el mismo en lo que se refiere a los mensajes que se transmiten entre dispositivos (Mensajes EIS), es decir, mandan los mismos tipos de mensajes y responden a ellos mediante el mismo tipo de comandos. Sin embargo, hay una diferencia entre ellas, ésta reside en el protocolo que se utiliza para la comunicación con el puerto serie. Dicho de otro modo, el estándar de intercambio de datos 1 Las librerías se encuentran en la pagina web http://www.smarthouse.ee/news.php y se descargan con el nombre de eibcontrol. Son unas librerías para linux y para dispositivos con BCU2. Página 5 de 7 entre dispositivos no distingue entre las diferentes BCUs, sin embargo, si es diferente en el puerto serie. El dispositivos NTA6F16H+COM, fabricado por Lingg & Janke, tiene una BCU tipo 1 por lo que las librerías que se encontraron no eran válidas para él. Conviene aclarar que una vez se pasa por la interfaz serie el sistema es totalmente compatible, independientemente del tipo de BCU que tengan los dispositivos de la instalación. De esta forma, el software creado es totalmente válido independientemente del tipo de dispositivos que haya en el sistema, siempre y cuando la interfaz RS-232 sea una interfaz con BCU tipo 1. Continuando con la búsqueda se encontraron las librerías que se han utilizado y que se detallan en un apartado posterior. Estas librerías estaban programadas en C. Por este motivo se optó por seguir un sistema estructurado en partes totalmente diferenciadas, en lo que se refiere a cuestiones de la tecnología utilizada puesto que, por requerimientos de portabilidad, la interfaz gráfica se iba a realizar en Java. Además, ambas partes podían considerarse totalmente independientes en cuanto a funcionalidad por lo que parecía lógico separar el sistema en las partes explicadas en el anterior apartado. Así, el sistema resultaría más eficiente, portable y ampliable. En resumen, se tienen dos dispositivos: un LINCE con un driver para comunicación con el puerto serie y unos programas de linea de comandos para interactuar con los dispositivos EIB, y un segundo equipo con un software Java sobre el que actúa directamente el usuario. A continuación, pasaremos a detallar las principales características del sistema EIB. Veremos como es la transmisión, el formato de las tramas y otros conceptos relacionados con el estándar. Cuestiones que han de conocerse para poder entender el proyecto plenamente. 2.4 LA CONVERGENCIA EUROPEA KNX. Existen mucho y muy diferentes tipos de sistemas domóticos, cada uno de ellos con una serie de características. En el anexo1 se muestran algunos de estos sistemas. Muchas de las soluciones que aparecen en el mercado pertenecen a una empresa, y su interoperabilidad con otros sistemas es muy limitada. En la actualidad, se hace necesario el uso de sistemas abiertos, que permitan usar diferentes dispositivos de distintos fabricantes en una misma instalación. Se busca por tanto, una interoperabilidad entre equipos. Por esto, siguiendo las recomendaciones de la CE (Comunidad Europea) los tres principales asociaciones europeas, se han unido en una asociación común denominada, Konnex: ● BCI (Batibus club Internacional), responsable del sistema BatiBUS. ● EIBA (European Installation Bus Association), responsable del sistema EIB. ● EHSA (European Home System Association), responsable del sistema EHS. A este agrupamiento de estas tres grandes asociaciones se le denomino “convergencia”. Su principal objetivo era el de crear un único estándar para la domótica e inmótica, el cual cubra todas las necesidades y requisitos de las instalaciones profesionales y residenciales del ámbito europeo. En definitiva, se trataba de, partiendo de los estándares Página 6 de 7 EIB, EHS y Batibus, crear un único estándar capaz de competir con los sistemas norteamericanos LonWorks y CEBus. KNX, que es el estándar que surge de la asociación Konnex, se basa en la tecnología EIB. Expande la funcionalidad de éste añadiendo un nuevo medio físico y los modos de configuración de BAtibus y EHS. Según esto, KNX, es totalmente compatible con EIB y por tanto, los dispositivos de los fabricantes EIB pueden unir sus productos a la nueva plataforma de una manera sencilla. Página 7 de 7