En los circuitos eléctricos controlados por PLC hay que distinguir
Anuncio

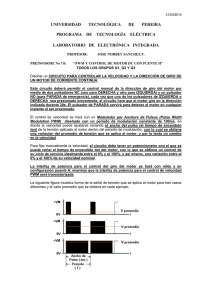
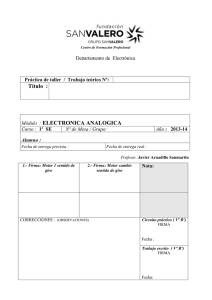
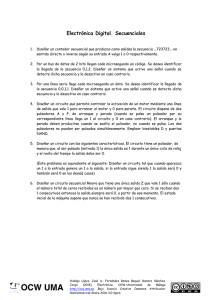
En los circuitos eléctricos controlados por PLC hay que distinguir tres etapas : a.- Circuitos de fuerza con su correspondiente alambrado b.- Circuito de alambrado al PLC, en el que se considera la botonera de mando, sensores, y accionamientos como contactores o drivers electrónicos c.- Circuito de control, que corresponde al programa que se escribe en el PLC para controlar los accionadores según la secuencia que define el problema o la situación de los sensores Problema .- Se pide un inversor de marcha Si este circuito es manejado por contactores, la solución en fuerza pide la existencia de dos contactores, KM1 para alambrar la alimentación de avance y KM2 para alambrar la alimentación de retroceso Según el tipo de motor es el circuito de alimentación de fuerza: 1.- Motor de CC con iman permanente ( en nuestro caso usaremos un motor cuya alimentación de armadura es de 12 V de CC ) 2.- Motor de CA trifásico Alimentación para una inversión de marcha de un motor de alterna trifásico 3.- Motor de AC monofásico con partida por condensador Estos motores traen en la tapa de su caja de conecciones un esquema de coneccion de alimentacion para dar su sentido de giro Caja de conexión de un motor monofasico con partida por condensador Entre los terminales U! y U2 esta conectado la bobina del rotor Entre los trminales Z1 y Z2 esta la bobina de partida, a veces trae un interruptor activado por la velocidad de rotacion del eje ( Centrifugo ) Entre los terminales X1 y X2 se conecta el condensador de partida La coneccion de los elementos se hacen con puentes metalicos salvo el condensador Avance retroceso Coneccion de los elementos y de la alimentacion de fuerza para tener sentido de giro en el motor monofasico Estas conecciones de los elementos y la de alimentacion se hacen con los contactos de los contactores, KM1 para el avance y KM2 para el retroceso como se ilustra a continuacion Alambrado de fuerza para un inversor de marcha de unmotor monofasico con partida por condensador Para comandar el inversor de marcha de un motor se necesita una botonera que de las ordenes de partida y parada , asi como un sistema de selección de sentido de giro Para el sentido de giro se pueden usar dos pulsadores o bien un comutador, lo que permite la existencia de dos tipos de botoneras y de dos filosofias de mando Los conmutadores de inversion de marcha son elementos de memoria electromecanica, es decir cuando se da una orden de selección de giro esta permanece en el tiempo hasta que se de la orden en sentido contrario manupulando el conmutador En cambio los pulsadores son elementos combinacionales en los cuales la orden se sostiene solamente mientras el pulsador permanesca presionado, razon por la cual estos elementos deben manejar un circuito de partida y parada que sostenga la orden todo el tiempo en el cual se deba marchar en un sentido de giro, estos circuitos de partida y parada van en el circuito de control que se programara en el PLC, tambien se requerira de pilotos indicadores de sentido de giro El control requiere tambien de un circuito de alambrado al PLC y esto estara definido por los insumos que ocupa el circuito, ES DECIR HABRA UN ALAMBRADO AL plc QUE DEPENDERA DE LA BOTONERA QUE ESCOJAMOS USAR Alambrado al plc con la botonera que comanda el sentido de giro por pulsadores Alambrado al PLC con la botonera que comanda el sentido de giro con el conmutador Una vez escogido el alambrado y botonera debe generarse el circuito de control Analisemos primero el inversor comandado por conmutador 1.- Esto requiere un bloque de partida y parada en el cual estan lo elementos que (pulsadores de partida , de parada y protecciones ) dan las ordenes; asi comolos elementos de señalizacion (pilotos de marcha y de apagado ) tambien genera la señal de habilitacion de funcionamieto ( M0 ) 2.- Tambien va un bloque de selección que entrega las ordenes de selección de avance y retroceso 3.- Debe existir un bloque de funciones que active las correspondientes salidas cuando exista la habilitacion y la orden correspondiente Llevando este bloque de funciones a un circuito de escalera nos queda el circuito electrico de control que permite selecciomar sentida de marcha de un motor Es de hacer notar que las señales que dan la orden de selección de sentido de giro son permanentes , es decir , tienen memoria electromecanicas, porque el conmutador es una memoria mecanica, permanece en la posicion ordenada en reposo Analizamos ahora el circuito de control comandado por pulsadores El unico cambio es el bloque de selección de sentido de giro porque la orden del pulsador esta presente solo cuando se presiona el pulsador ( este elemento no tiene memoria ) y la selección de sentido de giro tiene que estar presente durante todo el tiempo que se selecciona la marcha, es por esto que las salidas del selector son en reles de control ( M1 y M2 ) Como estas salidas tiene memoria deben provenir cada una de ellas de un circuito de partida y parada, es decir,: debe existir un circuito de partida y parada para la orden de avance comandada por el pulsador de avance y detenida por el pulsador de retroceso tambien debe existir un circuito de partida y parada para la orden de retroceso comandado por el pulsador de retroceso y detenida por el pulsador de avance Para saber que orden esta activa debe existir un piloto que indique el sentido de giro seleccionado Es de hacer notar que indistinto del tipo de motor escogido una vez seleccionado la botonera de control el alambrado al PLC es el mismo, asi como tambien es el mismo el circuito de control para cualquiera de los motores ya que solo se comanda KM1 y KM2,, lo unico que cambia es en la parte de fuerza la alimentacion y el tipo de alambrado para el sentido de giro Si la inversion de marcha se debe hacer sobre un motor manejado por un drives electronico, debe tenerse en cuenta que los drivers tienen una parte de fuerza y otra de control El variador de frecuencia de la familia FR-D700 trae terminales para la fuerza y para el control Permite como alimentacion de entrada 380v trifasico o da la alternativa de alimentacion monofasica de 220v para energizar un motor trifasico como se muestra en los esquemas siguientes La velocidad del motor queda determinada por la posicion de los contacto que alimentan las entradas RH RM y RL, estas entradas manejan velocidades fijas y progradas en el variador de frecuencia, si ninguna de ellas es alimentada, es decir no estan conectadas la velocidad queda controlada por el potenciometro Las entradas STF y STR determinan el sentido de giro del motor Si volvemos al control de giro con el PLC, el control visto anteriormente nos sirve, , salvo porque los contactores KM1 y KM2 s son reemplasados por el variador de frecuencia como se muestra en el esquema siguiente El termico F no se pone , se elimina porque la proteccion de sobrecarga se se programa en el variador de frecuencia