Mod Puente H
Anuncio

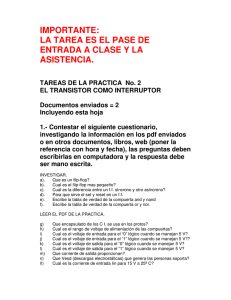
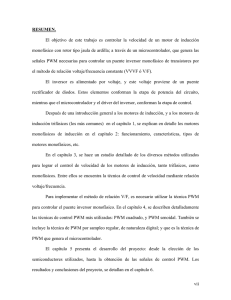
Mod Puente H EL TB6612FNG es un controlador dual de motores que es perfecto para interconectar dos motores de corriente continua a un microcontrolador o FPGA, aunque también puede ser usado para controlar un motor a pasos bipolar. Los puentes H basados en MOSFET son mucha más eficientes que los puentes H basados en BJT como el L298. Características Técnicas Número de canales: 2 Voltaje mínimo de operación: 2.5 V Voltaje máximo de operación: 13.5 V Corriente continua por canal: 1A Corriente pico máxima: 3A Máxima frecuencia de PWM 100 KHz Voltaje lógico mínimo: 2.7 V Voltaje lógico máximo: 5.5 V Figura1. Esquemático Simplificado Mod PUENTEH Rev B – 31 Mayo 2016 Figura2. Diagrama del módulo en bloques. Descripción de funcionamiento de conector a Protoboard Pin Nombre Función 1 3-5V (VCC) Voltaje de alimentación lógico 2 GND (DGND) 3 PWMB 4 MB2 Control de sentido de giro de motor B 5 MB1 Control de sentido de giro de motor B 6 EN 7 MA2 Control de sentido de giro de motor A 8 MA1 Control de sentido de giro de motor A 9 PWMA Referencia o tierra lógica Entrada PWM para velocidad de motor B Pin de activación (1) / desactivación (0) para el puente H Entrada PWM para velocidad de motor A Descripción de funcionamiento de conector a Motores Pin Nombre 1 Motor B1 Hacia motor B 2 Motor B2 Hacia motor B 3 GND (AGND) Función Referencia o tierra de alimentación a motores Mod PUENTEH Rev B – 31 Mayo 2016 4 3-13V (VM) Entrada de voltaje para motores 5 Motor A1 Hacia motor A 6 Motor A2 Hacia motor A Mod PUENTEH Rev B – 31 Mayo 2016