Sistema estático - Biblioteca UPIBI
Anuncio

ACADEMIA DE BIOINSTRUMENTACIÓN
1.1 INTRODUCCIÓN
Concepto de sistemas dinámicos y estáticos.
Un sistema dinámico es aquél en el cual los “efectos” actuales (salidas) son el
resultado de causas actuales y previas (entradas). En esta definición se introduce la noción
de causa y efecto, que muchas veces se utiliza para describir los fenómenos de ingeniería y
otros que no forman parte de esta disciplina. Es interesante observar que las ideas que se
analizarán más adelante se aplican también a sistemas ajenos a la ingeniería. Un ejemplo
esta en la población de un país o de una especie donde, en términos simples, el número
presente (salida) es el resultado de los nacimientos y las muertes anteriores (entradas).
La definición anterior difiere de la noción general de un sistema dinámico como aquél
que está en movimiento, es decir, que cambia (normalmente de manera rápida) con el
tiempo. Por lo general, en la mayoría de las poblaciones humanas el cambio parece ser muy
gradual, ¡aunque el crecimiento de ciertas células y cultivos biológicos es otra cuestión! Del
mismo modo, si bien la cantidad de dinero en un banco de cajeros automáticos puede
permanecer fija durante el fin de semana, esta cantidad es producto de todos los depósitos y
retiros ocurridos durante la semana laboral precedente.
Un sistema estático es aquél en el que los efectos actuales (salidas) dependen solo
de las causas actuales (entradas). En virtud de esta definición un sistema cuya salida cambia
con el tiempo puede describirse como estático, siempre y cuando las entradas cambien en
forma semejante. Observe que la escala de tiempo en la que se perciben los sistemas puede
provocar una gran diferencia. Dado cualquier sistema es posible elegir una medición de
tiempo lo bastante pequeña como para que el retardo inherente entre la entrada y la salida
se convierta en algo apreciable, haciendo por tanto que el sistema aparente sea dinámico.
En general, la elección de una escala de tiempo depende de los objetivos de la
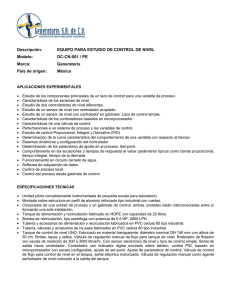
investigación del sistema. La figura 1.1 muestra un sistema de abastecimiento de agua que,
por ejemplo, pudiera ser típico de una granja. Por ahora, sólo nos interesa el tanque y la
válvula, como subsistemas o componentes. Si la presión en el tubo inmediatamente arriba de
la válvula es la presión medida P, y la válvula se descarga a la atmósfera, entonces la caída
de presión en la válvula es también P. Si la presión atmosférica es Po, la presión absoluta
es (P+Po) de modo que la caída de presión es (P+Po)-Po. Si en este momento, se ignora la
velocidad y la fricción del fluido en la tubería, P es proporcional a la densidad del agua ρ, y a
la altura de la columna de agua.
Ρ= pg (h+H0 )
(1.1)
donde g es la aceleración de la gravedad, h y H0 se definen en la figura 1.1. Se ha
supuesto que la parte superior del tanque está a la presión atmosférica (el tanque no esta
completamente cubierto). La relación entre la caída de presión al cruzar una válvula y la
razón de flujo volumétrico a través de la válvula es en general(para un flujo turbulento) de la
siguiente forma
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
1
ACADEMIA DE BIOINSTRUMENTACIÓN
(1.2)
Qsálida=C{P}1/2
Figura 1.1
Dinámica de un sistema de
Abastecimiento de agua.
donde C es una constante empírica que representa la apertura y otras características de la
válvula. Se supondrá que la apertura de la válvula es fija. Con base a la ecuación (1.1),
Qsalida (t ) = C{(ρg )[h(t ) + H 0 ]}
1/ 2
(1.3)
Ya que son constantes todas las cantidades del lado derecho de la ecuación (1.3), excepto
h, Qsalida y h guardan una relación algebraica. En otras palabras cualquier cambio en h se
reflejará de inmediato con un cambio correspondiente en Qsalida. Así,se centra la atención en
la válvula y la consideramos como el sistema, las ecuaciones (1.2) y (1.3) supondrán que la
entrada es h o la presión P, la salida es el flujo Qsálida (observe que , en este caso, la caída
de presión provoca un flujo), y la válvula un sistema estático. Aún cuando la caída de presión
cambie, como sería el caso si se encendiera la bomba que eleva el agua desde el pozo
hasta el tanque y aumentara el nivel h del tanque, el sistema según la definición seguirá
siendo estático debido a que el flujo de salida actual Qsalida (t) continuaría dependiendo de la
caída en la presión P(t), de acuerdo con las ecuaciones (1.2) o (1.3).
Considere ahora el tanque como el sistema. Si se considera como entrada la razón
neta de flujo de entrada
(Qentrada - Qsalida), entonces la salida es el resultado en el cambio de nivel, o el propio nivel del
cambio h. El nivel de agua en el tanque en cualquier momento es el resultado de todas las
entradas y salidas anteriores de agua. Incluso si todas las operaciones se cerraran hoy, de
manera que el nivel actual del tanque permaneciera constante, la cantidad de agua presente
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
2
ACADEMIA DE BIOINSTRUMENTACIÓN
seguiría siendo el producto de todas las entradas y salidas ocurridas antes. Por lo tanto, el
sistema es dinámico. Matemáticamente, la entrada y salida se relacionan a través del
volumen del agua en el tanque:
(1.4)
t
Volumen(t ) = ∫ {Qentrada (t ) − Qsalida (t )}dt + Volumen(0)
0
El volumen y el nivel de agua en el tanque guardan una relación algebraica:
h(t ) = Función algebraica del volumen (t)
(1.5a)
Observe que, en el presente análisis, el volumen de agua en el tanque es también una salida
lógica para el sistema. Tal posibilidad de intercambio de variables se sugiere muchas veces,
como se verá, cuando la relación entre ellas es estática – por ejemplo, la ecuación (1.5a).
Para el caso especial en que la sección transversal del area del tanque A es independiente
del nivel,
(1.5b)
Volumen(t ) = Ah(t )
y se tiene entonces que
⎛1⎞
h(t ) = ⎜ ⎟ ∫ {Qentrada (t ) − Qsalida (t )}dt + h(0)
⎝ A ⎠0
t
(1.5c)
Operadores dinámicos básicos.
El tanque de agua nos proporciona un modelo muy sencillo de un sistema dinámico
básico conocido como integrador. A veces nos referiremos a un sistema dinámico como un
“acumulador”. El tanque de la figura 1.1 “acumula” la entrada neta (flujo), que es positiva
cuando el flujo de entrada supera al de salida. La acumulación es negativa cuando el flujo de
salida es mayor que el de la entrada; sin embargo, el término sigue siendo aplicable. La
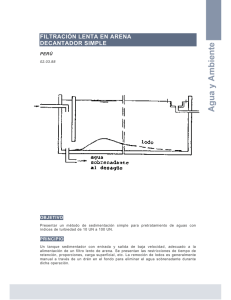
integración especificada en la ecuación (1.5 c) se interpreta usualmente como el área bajo la
curva de la figura 1.2. En este caso, es (1 / A) veces la diferencia entre el área bajo las
curvas Qentrada y Qsalida , desde el momento cero hasta el tiempo presente t. Esto es la zona
sombreada de la figura 1. 2. Con base en estos resultados es clara la dependencia del nivel
actual h(t) respecto de las entradas anteriores.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
3
ACADEMIA DE BIOINSTRUMENTACIÓN
Figura 1.2
El tanque de agua
Como un integrador.
El nivel presente del tanque ( h en el tiempo = t ) es como se muestra, ya que el
tanque “recuerda” todos los flujos anteriores de entrada y salida. Así, nos referiremos
también a un sistema dinámico como aquel que tiene memoria. Observe de nuevo que el
nivel del agua en el tanque no ha cambiado en el periodo identificado como hoy, aunque el
sistema es, en este contexto, dinámico.
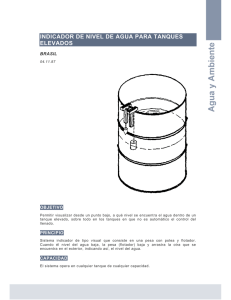
La palabra memoria describe a otro modelo de sistema dinámico básico, que
llamaremos operador de retardo (en el tiempo). Un ejemplo de un operador de retardo es el
abastecimiento de agua caliente en una mañana fría de invierno. Si se considera como
entrada el acto de abrir la llave- el caudal de agua caliente sale del calentador en respuesta
a la señal de la presión en el grifo y como flujo la salida de agua caliente que sale de la
llave, entonces sabemos por experiencia que el agua caliente no aparece de inmediato al
abrir la llave (el agua que sale del grifo no está caliente al principio).
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
4
ACADEMIA DE BIOINSTRUMENTACIÓN
El agua fría se descarga de la tubería hasta que el agua caliente llega del calentador
hasta el grifo. El tiempo que esto requiere es el período de retardo o retraso de transporte o
tiempo muerto T, y es evidente que se trata de un sistema dinámico. En términos
matemáticos, si el flujo de agua caliente desde el calentador se representa como Q (t),
entonces el flujo de agua caliente del grifo esta dado por Q( t - T) es la misma que Q( t ),
pero trasladada T unidades de tiempo a la derecha. Ambos operadores dinámicos básicos se
ilustran en la figura 1.3.
Figura 1.3
Operadores dinámicos básicos.
1.2 DESARROLLO DE LA INSTRUMENTACIÓN INDUSTRIAL.
La automatización de los procesos industriales a través de los años ha dado lugar a
un avance espectacular de la industria. Todo ello ha sido posible gracias a una serie de
factores entre los que se encuentran las nuevas tecnologías en el campo mecánico, la
introducción de los computadores y sobre todo el control y la regulación de sistemas y
procesos. La aparición de la microelectrónica y de los microprocesadores ha facilitado el
desarrollo de técnicas de control complejas, la robotización, y otros aspectos como la
implementación de sistemas de gobierno y la planificación. Todos estos elementos llevan
consigo la reducción de costos, el aumento de la productividad y la mejora del producto.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
5
ACADEMIA DE BIOINSTRUMENTACIÓN
1.3 SISTEMAS DE CONTROL.
Un sistema de control, es un conjunto de elementos interconectados que al recibir
una señal cada uno de los elementos que constituyen el sistema, realizan una función
específica, que es necesaria para que dicho elemento controle determinadas funciones del
sistema.
Diferentes pasos de un sistema de control:
Comparación de la señal medida
La desviación de la magnitud del valor prefijado, se envía al controlador
El controlador evalúa la desviación y da salida a una señal de corrección
Esta señal de corrección llega al elemento final de control (EFC) y respondiendo este
a ella modificando las condiciones del proceso
o Detección del cambio de magnitud bajo control, por los elementos primarios de
medida
o Transmisión de la variación de la magnitud de control al modelo de comparación.
o La señal de entrada al controlador queda modificada en consecuencia.
o
o
o
o
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
6
ACADEMIA DE BIOINSTRUMENTACIÓN
1.3.1
DIAGRAMA A BLOQUES DE SISTEMAS DE CONTROL.
Circuito de control abierto.
Figura 1.1.1
Circuito de control pre-alimentado.
Figura 1.2.1
Circuito de control retroalimentado.
Figura 1.3.1 Diagrama a bloques de sistemas de control
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
7
ACADEMIA DE BIOINSTRUMENTACIÓN
1.3.2
SISTEMA DE CONTROL ABIERTO (LAZO ABIERTO).
Maneja información pura, tiene control manual así como un control de tiempo.
1.3.3
SISTEMA DE CONTROL PRE-ALIMENTADO (LAZO CERRADO).
En contraste con el circuito de control abierto, una medición en la entrada permite
hacer una corrección en los aditivos usados y obtener así el objetivo deseado. Este tipo de
control se parece al circuito abierto en cuanto a la predicción, pero difiere en cuanto a que no
tiene un programa fijo, sino que se regula de acuerdo a las necesidades, ya que cualquier
cambio en la entrada produce una acción correctiva en el proceso, este tipo de control forma
realmente un circuito cerrado en el que intervienen un instrumento de medición o sensor, un
computador o controlador, un regulador de aditivos, y el proceso, los cuatro elementos
ligados.
1.3.4
SISTEMA DEL CONTROL POR RETROALIMENTACIÓN.
Si para un sistema dinámico la salida presente depende de las entradas anteriores,
entonces, al introducir las entradas apropiadas en el presente, es posible influir en la salida
en un futuro inmediato. Las palabras clave son apropiado e influir. ¿Cómo se determina una
entrada apropiada? ¿La influencia es importante, insignificante, buena o mala? Es razonable
esperar que la especificación de la entrada adecuada requiera al menos de cierto
conocimiento sobre el funcionamiento del sistema y que sea posible lograr los resultados
deseados (la salida subsecuente) si se conoce la salida presente. Por lo general, la
operación del sistema se representa con algún modelo de su comportamiento, y la
determinación más directa de la salida presente es una medición.
Considere de nuevo el abastecimiento de agua de la figura 1.1. Con base en el
análisis anterior, es evidente que la operación del sistema del tanque de agua esta bastante
bien determinada. Como lo demostró la ecuación (1.3), el flujo de un grifo, y ciertamente en
cualquier punto en el que se emplee el agua, es una función del nivel del tanque de agua, h.
Algunas de las aplicaciones del abastecimiento de agua (tomando una vez más la granja
como ejemplo) pudieran ser bastante sensibles al flujo o presión de agua en el punto en el
que se emplea. Las boquillas de presión para lavar el equipo o para limpiar los productos o
los componentes del sistema de irrigación por aspersores son dos buenos ejemplos.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
8
ACADEMIA DE BIOINSTRUMENTACIÓN
Figura1.4
Control de lazo abierto de un sistema
De abastecimiento de agua.
¿Cómo asegurar que el nivel del tanque de agua permanezca suficientemente alto y
con regularidad adecuada para estas aplicaciones?
Una manera sencilla, suponiendo que durante lapsos significativos el volumen de agua
empleado en los diversos lugares es más o menos uniforme y predecible, y que es posible
tolerar en las aplicaciones cierta variación en la presión, y por tanto en el desempeño, sería
operar la bomba y llenar el tanque con el agua del pozo con base en cierto tipo de programa
de tiempos. En la figura 1.4a muestra la forma en que el nivel real del tanque depende de la
operación programada de la bomba o del nivel deseado del tanque. Si bien el programa de
operación de la bomba puede deducirse de, por ejemplo, el análisis estadístico de los datos
pasados del uso del agua en la granja, no hay nada en el esquema de control de la figura
1.4a que prescriba relación alguna entre una variable del tanque y la otra (en este caso, las
variables son Qentrada y h. El término Qsalida se relaciona con h mediante el parámetro de
apertura de la válvula, C, que en este caso se toma como una perturbación del sistema o
entrada de perturbación). Ciertamente, si en algún momento la forma de usar el agua (la
apertura equivalente de la válvula) debiera desviarse de manera significativa de aquél en el
que se basa el programa de la bomba, el sistema de control fallaría u operaría muy
deficientemente. Este tipo de esquema de control se conoce como control de lazo abierto.
En la figura 1.4b se observa la estructura de un sistema de lazo abierto. La
característica o variable específica del sistema, la salida que se desea controlar, se conoce
como variable controlada, en tanto que la característica o variable que se determina por
medio de la acción de control se conoce como entrada de control. De manera colectiva los
elementos de control pueden ser llamados controladores, aunque, como se verá más
adelante pueden encontrarse en otros subgrupos. Por lo general la entrada de referencia
supone el valor deseado de la variable controlada. El lazo es abierto en el sentido de que la
entrada de control no puede determinarse en términos de la variable controlada, es decir el
controlador no prescribe una relación entre la entrada de control y la variable controlada.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
9
ACADEMIA DE BIOINSTRUMENTACIÓN
Estructura del control por retroalimentación.
Otra manera de tratar el control de nivel del tanque de agua es tener un operador que
encienda la bomba cada vez que el nivel del tanque baje del nivel de referencia y la apague
de nuevo cuando el tanque sobrepase dicho nivel. Para facilitar el trabajo del operador, es
posible conectar al tanque un sistema de medición y transmisión, y un indicador de nivel (TN
e IN), y emplearlos para mostrar el nivel del tanque al operador (véase la figura 1.5a). El
resultado es un sistema de control de lazo cerrado, ya que existe una relación prescrita
(aunque de interruptor) entre el nivel del tanque y el flujo de entrada.
Figura1.5
Control manual y automático
Del nivel del agua en el tanque.
El operador que observa el nivel del tanque proporciona la vía para cerrar el lazo. Sin
embargo un sistema de control con un ser humano como un elemento del controlador es
manual, es decir, no es automático. En una granja ocupada, en la que un empleado no se
puede dedicar exclusivamente a la operación de la bomba, es obvio que tal control sería
inadecuado o insatisfactorio. La figura 1.5b muestra un ejemplo de sistema de control
automático (de lazo cerrado) para el nivel del tanque. En este caso, la comparación de la
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
10
ACADEMIA DE BIOINSTRUMENTACIÓN
señal del nivel del tanque con el valor deseado ( que se proporciona al sistema como el
punto de calibración y el encendido y apagado de la bomba lo realiza el equipo apropiado en
el controlador.
Sin embargo observe que los sistemas manuales y automáticos descritos arriba suponen:
1. Mantener (a pesar de ciertas interferencias externas) cierta relación prescrita de una
variable del sistema con otra, empleando el resultado de una comparación entre
estas variables;
2. Transmitir alguna señal o información desde una etapa posterior (salida) del sistema
a otra previa (entrada); es decir, cerrar el lazo mediante una retroalimentación.
El concepto que interviene aquí es el de control por retroalimentación.
En el control por retroalimentación se utiliza una medición de la salida del sistema
para modificar la entrada, de tal forma que la salida permanezca próxima al valor deseado.
Existen muchos sistemas tanto de los que ocurren de manera natural como artificial,
cuya operación apropiada depende del control por retroalimentación. Por lo general en todos
los casos existe un instrumento de medición (sensor) o elemento de retroalimentación que
mide la variable de salida o del sistema que interesa y transmite la medida a un controlador.
Este compara la señal con el valor deseado o punto de calibración, y envía las instrucciones
pertinentes al mecanismo actuador ( o elemento final de control) que a su vez actúa sobre el
sistema u objeto de control (o planta), para adecuar las salidas subsecuentes (relación
prescrita) con el punto de calibración.
Lo que se ha descrito es la estructura típica de un control por retroalimentación ( o de
lazo cerrado) (véase figura 1.6). Al comparar la estructura de control por retroalimentación
que aparece en la figura 1.6 con la estructura de lazo abierto que aparece en la figura 1.4b,
note que el actuador puede, dependiendo de las circunstancias, considerarse parte del
controlador o de la planta. La entrada del actuador, procedente del controlador se conoce
como variable manipulada. Con la estructura de control por retroalimentación como guía
podemos analizar sistemas que sospechamos operan como sistemas de control por
retroalimentación.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
11
ACADEMIA DE BIOINSTRUMENTACIÓN
La idea consiste en identificar componentes de un sistema, que funcionan como
elementos de estructura del control por retroalimentación -controlador, actuador, objeto de
control y sensor , así como establecer la variable controlada y el valor de calibración. Si se
puede hacer todo esto, entonces el sistema que se estudia es un sistema de control por
retroalimentación. Considere el caso del llamado termostato humano. Este notable sistema
mantiene la temperatura del cuerpo alrededor de los 37ºC (98.6 ºF), con un grado más de
tolerancia, independientemente si la persona está en Alaska en pleno invierno o en Florida
durante el verano.
En este último caso, es decir, para prevenir el sobrecalentamiento, la acción de
control (entrada de control) es la dilatación de los vasos sanguíneos en la piel, que eleva el
transporte de calor del interior del cuerpo a la superficie; y el sudor, que aumenta el ritmo
con que se pierde calor desde la superficie hacia el exterior, a través de la evaporación
(véase [3). El controlador está en el hipotálamo, una zona de la base del tallo cerebral sobre
el punto en que se cruzan los nervios ópticos. ¿Pero donde están los sensores? Durante un
tiempo se pensó que la piel era el principal instrumento de medición para la protección
contra el exceso de calor.
Se hizo un experimento en el que se realizaron los siguientes pasos: (1) la
temperatura de la piel, (2) se comparo la temperatura interna (medida con un termopar que
se colocó en contacto con el tímpano, que está cerca del hipotálamo) y (3) se registraron los
niveles de sudoración de una persona en reposo y durante la realización de ejercicio. ¡Los
resultados demostraron que los principales sensores para la protección contra el exceso de
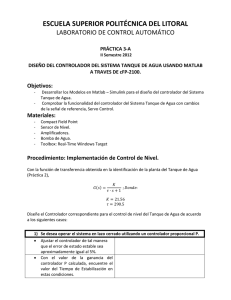
calor se ubican en el propio controlador (el hipotálamo)! En la figura 1.7a, la temperatura de
la piel (como candidato para la señal de retroalimentación) no muestra una relación
consistente con la tasa de sudoración (una entrada de control).
Por otra parte la figura 1.7b indica que el nivel de sudoración es relativamente fijo
cuando la temperatura interna (otro candidato para la señal de retroalimentación) medida
cerca del controlador esta por debajo de los 36.9 ºC (98.4 ºF). Por encima de esta
temperatura, la tasa de sudoración aumenta en forma considerable cuando lo hace la
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
12
ACADEMIA DE BIOINSTRUMENTACIÓN
temperatura interna. Estos resultados definieron con precisión el punto de calibración de esta
persona como 36.9 ºC (98.4 ºF) en el momento del experimento.
Además, los resultados indican que ciertamente existe un sensor que se ubica cerca
o dentro del controlador y que el sistema de protección contra el calor excesivo es un
sistema de control por retroalimentación. Un ejemplo de retroalimentación creado por el
hombre en el que el controlador y el sensor están combinados es el reloj de agua, inventado
por Ctesibios de Alejandría ,Egipto, quien se supone vivió durante el reinado de Ptolomeo II
(Filadelfo), 285-247 a. de C. (véase [4]). Se cree que este reloj es el instrumento por
retroalimentación más antiguo.
Figura 1.7
Disipación de calor como una función
De las temperaturas interna y de la piel.
De “The Human Thermostat” por T.H.
Bezinger.Copyringht 1960 por Scientific
American, Inc. Todos los derechos
Reservados.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
13
ACADEMIA DE BIOINSTRUMENTACIÓN
El elemento esencial del reloj de agua (figura 1.8a) es la válvula de flotación o
controlador, que asegura que una tasa constante de agua gotee del vaso regulador (objeto
de control) al mantener un nivel constante de agua (variable controlada) en el vaso. El nivel
de agua en el vaso regulador depende del abastecimiento externo de agua. Como se
observa en la figura 1.8a, el mismo flotador que determina la apertura de la válvula y por
tanto el nivel de influjo de agua sobre el vaso, responde así mismo a la altura del vaso
maestro. Así, al mismo tiempo, el controlador dosifica y “mide” el nivel de agua.
La función del reloj de agua se logra al recolectar el agua que gotea en el vaso
regulador en otro vaso (que no se muestra), cuyos niveles están calibrados para medir el
tiempo. La figura 1.8b ilustra la estructura de control por retroalimentación del reloj egipcio
del agua. Observe que si el nivel deseado de agua en el vaso regulador es aquél en el que la
válvula (cono invertido y flotador), esta casi cerrada (por el flotador) entonces la presión p en
la línea de abastecimiento de agua representa esencialmente una perturbación en el
sistema.
Figura 1.8
Componentes y estructura
De reloj de agua.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
14
ACADEMIA DE BIOINSTRUMENTACIÓN
Otros tipos de control.
Hasta ahora, el análisis ha sugerido varias clasificaciones o tipos de sistemas de
control. Se ha visto que los sistemas de control pueden ser de lazo cerrado, manuales o
automáticos, y, en un sentido universal, que ocurren de manera natural o bien construidos
por el hombre. Existen muchos otros tipos de sistemas de control que pueden clasificarse
con base en los diversos aspectos del tema o disciplina. Por ejemplo, las clasificaciones
naturalmente o hechos que el hombre, manual o automáticamente, pueden considerarse
clasificaciones basadas en factores sociales o del entorno. La tabla 1.3 resume los tipos de
sistemas de control, clasificados según las siguientes bases:
1. Sociales o del entorno.
2. Por la naturaleza del lazo.
3. Por la naturaleza del controlador.
4. Por la naturaleza de la planta.
5. Por el tipo de variable controlada.
6. Por la naturaleza del punto de calibración o referencia.
7. Por el tipo de ley de control.
8. Por la técnica de análisis de diseño.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
15
ACADEMIA DE BIOINSTRUMENTACIÓN
Naturaleza del lazo:
Sistema de control de prealimentación. El control de lazo abierto del tanque de agua
que se considera inadecuado para perturbaciones significativas en la apertura anticipada de
la válvula. Es posible mejorar significativamente esta situación si la acción de control se
determina con base en la medición de la apertura de la válvula. Ciertamente, si el
conocimiento de la planta es exacto [las ecuaciones (1.3) y (1.5a) son precisas, y los valores
de parámetro, como A, también lo son] y la medición de las perturbaciones es completa
(equivalentemente si C se mide con precisión todos los puntos un donde el agua es
utilizada).
Entonces el desempeño del sistema de control de lazo abierto puede ser tan bueno o
aún mejor que el sistema correspondiente a lazo cerrado. Un sistema de control de
prealimentación (véase figura 1.9b) es un sistema de control de lazo abierto que determina la
entrada de control a la planta con base en la mediciones de la entrada alterada a la planta.
La trayectoria entre las entradas alteradas y las de control es un lazo de prealimentación
porque ambas variables están en el mismo “lado” de la planta [véase la ecuación (1.5c)].
Figura 1.9
Sistema de control
De prealimentación.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
16
ACADEMIA DE BIOINSTRUMENTACIÓN
Naturaleza del controlador:
Control discontinuo versus control continúo. Todos los controladores considerados
hasta ahora son discontinuos en su operación. En particular, la acción de control (operación
de la bomba), o la ley de control, es de encendido-apagado. Llamada también bang-bang. La
bomba esta encendida (se supone una velocidad tope y con un máximo desplazamiento) o
apagada (cero flujo). esto contrasta con el control continuo, en el que la salida del
controlador (variable manipulada) es una función continua de la entrada del controlador
(variable de error). La figura 1.10 muestra un ejemplo de un sistema de control continuo en el
nivel de un tanque. En este caso, la variable manipulada es la posición del vástago de la
válvula de flujo de entrada. Así la tasa de entrada del flujo de agua al tanque, Qentrada, es
continuamente variable, suponiendo la existencia de una fuente constante de abastecimiento
de agua.
Tipo de variable controlada:
Con base en la variable controlada, los sistemas de control de nivel del tanque de
agua de las figuras 1.4a, 1.5, 1.9a y 1.10 pueden llamarse sistemas de control de nivel de
líquido. Otros ejemplos de variables controlables incluyen altura (como el sistema de control
de altura de una nave espacial), cabeceo (como el sistema de control de cabeceo de un
avión) , velocidad (como por ejemplo un motor de corriente directa), posición fuerza, par de
torsión, presión, flujo, corriente, voltaje, flujo magnético, frecuencia, temperatura, humedad,
densidad, concentración y composición química.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
17
ACADEMIA DE BIOINSTRUMENTACIÓN
Figura 1.10
Control continuo
Del nivel del tanque.
En la figura 1.10, si el flujo que entra al tanque es la variable controlada que interesa,
y si el tanque se considera como parte del sistema de medición de flujo, entonces puede
describirse el sistema de control que se ilustra en la figura como un sistema de control de
flujo. Los controles de flujo de líquido, nivel del líquido, presión y temperatura son comunes
en reactores, columnas de destilación, intercambiadores de calor y sistemas de
almacenamiento de líquidos. Estos son componentes típicos en lo que con frecuencia se
denominan industrias de proceso.
Es posible hacer clasificaciones más generales de los sistemas de control con base
en el tipo de variable controlada por ejemplo, sistemas de control de proceso y
servomecanismo.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
18
ACADEMIA DE BIOINSTRUMENTACIÓN
Servomecanismos versus procesos de control.
En sentido estricto, un servomecanismo es un sistema de control por retroalimentación en el
que la variable controlada es una posición (mecánica), por ejemplo, la posición lineal de un
pistón hidráulico o angular en el cigüeñal de un un motor.
. En forma más general, la posición mecánica está estrechamente asociada con la
velocidad, la aceleración, la fuerza, el par de torsión y (considerando dispositivos
electromecánicos) la frecuencia, el voltaje y la corriente. En este contexto, los procesos de
control por lo general se refieren a los sistemas de control con otras variables controladas
como el nivel del líquido, la presión, la temperatura, la densidad, la concentración o la
composición química.
El sistema de posición de una impresora de matriz de puntos es un ejemplo de
servomecanismo que resultará familiar para la mayoría. Si ha retirado la cubierta de este tipo
de impresoras para, por ejemplo, cambiar la cinta, habrá observado la mayoría de los
componentes mecánicos del sistema de transporte del carro. En realidad, el sistema de
posición de la cabeza de impresión consiste en el sistema de posición (lateral) del carro (que
es un verdadero servomecanismo) y el sistema de posición (longitudinal) del papel (que
puede ser de lazo abierto, excepto quizá por la entrada de un sensor de falta de papel).
Un sistema común de transporte de papel en el sistema de alimentación por fricción
(que no se ilustra), en el que unos rodillos de presión oprimen el papel contra la charola, el
papel es transportado entre ella y los rodillos. La cabeza de impresión esta montada en un
carro que funciona sobre rieles de baja fricción que hacen ir y venir por la página mediante
una corredera (por lo general un a banda temporizada), que constituye el enlace de impulso
entre dos poleas y el tren de transmisión de un motor de varias velocidades.
La posición deseada de la cabeza de impresión y el patrón de puntos a imprimir son
parte de los datos que envía la computadora al paquete de control electrónico de la
impresora. Interfase de comunicación, impulsores, panel de control, memoria y lógica
principal. La interfase de comunicación maneja el intercambio de datos entre la computadora
y la impresora. En el panel de control una persona interactúa con la impresora (por ejemplo,
para cambiar modos de operación, como tipos de letra).
Los impulsores son necesarios para convertir señales digitales de baja energía
(salida de control) de paquete electrónico a niveles de voltaje y corriente que permitan operar
los actuadores: motores y solenoides. La unidad lógica principal incluye a uno o más
microprocesadores que toman las decisiones de control. Para la posición del carro, la salida
del controlador (paquete de control electrónico) -es decir, los datos del motor del carro- se
envía al actuador (motor de pasos) mediante el impulsor del motor del carro. Un codificador
óptico (por lo general integrado con la flecha del motor a pasos) envía información de
distancia y dirección (e incluso velocidad) de regreso al paquete de control electrónico.
Existe asimismo un sensor “lugar de referencia” de la cabeza de impresión que
informa al paquete de control electrónico cuando el carro alcanza la posición máxima. La
lógica del paquete de control electrónico utiliza esas señales de retroalimentación para
calcular los datos del motor del carro necesarios para colocar con precisión la cabeza en la
posición deseada de impresión. Hoy en día, las resoluciones de posición de la cabeza de
impresión de 0.0028 (0.07 milímetros), o mejores son comunes, de modo que las densidades
de puntos en texto y gráficas de 360 puntos por pulgada se han vuelto comunes.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
19
ACADEMIA DE BIOINSTRUMENTACIÓN
1.4 DEFINICIONES Y APLICACIONES.
Los instrumentos de control empleados en la industria de proceso tales como
química, petroquímica, alimenticia, metalúrgica, energética, textil, papel, etc., tienen su
propia terminología; los términos empleados definen las características propias de medida y
de control y las estáticas y dinámicas de los diversos instrumentos utilizados: Indicadores,
registradores, controladores, transmisores y válvulas de control.
La terminología empleada se ha unificado con el fin
usuarios y los organismos o entidades que intervienen directa o
de la instrumentación industrial empleen el mismo lenguaje. Las
empleados se relacionan con las sugerencias hechas por la
Makers Association) en su norma PMC20.
1.4.1
e que los fabricantes, los
indirectamente en el campo
definiciones de los términos
SAMA (Scientific Appratus
CAMPO DE MEDIDA (RANGO):
Espectro o conjunto de valores de la variable medida que están comprendidos dentro
de los limites superior e inferior de la capacidad de medida o transmisión del instrumento.
1.4.2
ALCANCE:
Es la diferencia algebraica entre los valores superior e inferior del campo de medida
del instrumento.
1.4.3
ERROR:
Es la diferencia algebraica ente el valor leído o transmitido por el instrumento y el
valor real de la variable medida.
1.4.4
PRECISIÓN:
Es la tolerancia de medida o de transmisión del instrumento y define los límites de
error cometidos cuando el instrumento se emplea en condiciones normales de servicio.
1.4.5
ZONA MUERTA O BANDA MUERTA:
Es el campo de valores de la variable que no hace variar la indicación o la señal de
salida del instrumento, es decir que no produce su respuesta.
1.4.6
SENSIBILIDAD:
Es la razón entre el incremento de la lectura y el incremento de la variable medida.
1.4.7
REPETIBILIDAD:
Es la capacidad de reproducción de las posiciones del índice del instrumento al medir
repetidamente valores idénticos de la variable en las mismas condiciones de servicio y en el
mismo sentido de la variación recorriendo todo el campo.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
20
ACADEMIA DE BIOINSTRUMENTACIÓN
1.4.8
HISTÉRESIS:
Es la diferencia máxima que se observa en los valores indicados por el índice o la
pluma del instrumento para el mismo valor cualquiera del campo de medida cuando la
variable recorre toda la escala en los dos sentidos, ascendente y descendente.
1.4.9
CAMPO DE MEDIDA CON ELEVACIÓN DE CERO:
Es aquel campo de medida en el valor cero de la variable o señal medida es mayor
que el valor inferior del campo.
1.4.10 CAMPO DE MEDIDA CON SUPRESIÓN DE CERO:
Es aquel campo de medida en el que el valor de cero de la variable o señal medida
es menor que el valor inferior del campo.
1.4.11 ELEVACIÓN DE CERO:
Es la cantidad con que el valor de cero de la variable supera el valor inferior del
campo. Puede expresarse en unidades de la variable medida o en % del alcance.
1.4.12 SUPRESIÓN DE CERO:
Es la cantidad con que el valor inferior del campo supera el valor cero de la variable.
1.4.13 DERIVA:
Es una variación en la señal de salida que se presenta en un periodo de tiempo
determinado mientras se mantienen constantes la variable medida y todas las condiciones
ambientales.
1.4.14 FIABILIDAD:
Medida de la probabilidad de que un instrumento continúe comportándose dentro de
los límites especificados de error a lo largo de un tiempo determinado y bajo condiciones
especificadas.
1.4.15 RESOLUCIÓN:
Magnitud de los cambios de escalón de la señal de salida (expresados en % de la
salida de toda escala) al ir variando continuamente la medida en todo el campo.
1.4.16 RUIDO:
Cualquier perturbación eléctrica o señal accidental no deseada que modifica la
transmisión, indicación o registro de los datos deseados.
1.4.17 LINEALIDAD:
La aproximación de una curva de calibración a una línea recta especificada.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
21
ACADEMIA DE BIOINSTRUMENTACIÓN
1.4.18 ESTABILIDAD:
Capacidad de un instrumento para mantener su comportamiento durante su vida útil y
de almacenamiento especificadas.
1.4.19 TEMPERATURA DE SERVICIO:
Campo de temperaturas ene el cual se espera que trabaje el instrumento dentro de
límites de error especificados.
1.4.20 VIDA ÚTIL DE SERVICIO:
Tiempo mínimo especificado durante el cual se aplican las características de servicio
continuo e intermitentemente del instrumento sin que se presenten cambios en su
comportamiento más allá de tolerancias especificadas.
1.5
SIMBOLOGÍA Y NOMENCLATURA (ISA) PARA INSTRUMENTOS.
En todas las ingenierías, los términos empleados tienen un significado específico
para esa ingeniería, el objetivo de estas definiciones es formar un lenguaje propio que impida
errores en interpretación al momento de hacer requisitos o entender la literatura y artículos
técnicos de instrumentación. Estos términos fueron normados por la Sociedad de
Instrumentistas de América (ISA).
La norma de la SIA que rige esta información es conocida como S5.1 y su traducción
al español fue aceptada por su filial en Estados Unidos. Para mayor referencia a
continuación de cada término se da su equivalencia en ingles. La traducción de las
siguientes definiciones esta tomada literalmente de la Sociedad de Instrumentistas de
América, Sección México.
¾ Alarma (‘Alarm’) . Dispositivo que indica la existencia de una condición normal por
medio de un cambio discreto en una señal audible, visible, o ambas, emitida para
atraer la atención.
¾ Atras del tablero (‘behind the board ‘) . Término aplicado a un lugar que:
(1) está dentro de un área que contiene al tablero de instrumentos.
(2) está dentro o atrás del tablero, o no es accesible al operador para su uso normal, y
(3) no se designa como local.
¾ Círculo (‘ballon’). Símbolo utilizado para representar un instrumento o su
identificación.
¾ Circuito (‘lop’) . Combinación de uno o más instrumentos interconectados para medir
o controlar, o ambos, una variable de proceso, también se le conoce como “lazo”.
¾ Conmutador ( ‘conmuter’) . Dispositivo de operación manual que conecta,
desconecta o transfiere uno o más circuitos y que no es una válvula de control o
válvula de bloqueo de dos posiciones.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
22
ACADEMIA DE BIOINSTRUMENTACIÓN
¾ Controlador (‘controller’). Dispositivo con una señal de salida que se puede
modificar para mantener la variable controlada en un valor determinado dentro de
límites específicos, o que puedan alterar la variable en forma particular. Un
controlador manual es una estación de carga manual y su salida no depende de la
variable de proceso medida, sino que se puede modificar a voluntad del operador.
Un controlador puede integrarse con otros elementos funcionales del circuito de
control.
¾ Convertidor (‘converter’) . Dispositivo que recibe información en forma de señal de
instrumento, altera la forma y envía una señal de salida resultante. Un convertidor es
un tipo especial de revelador. Con frecuencia a un convertidor se le llama transductor,
aunque este último es un término general cuyo uso no se recomienda para la
conversión de una señal específica.
¾ Elemento final de control (‘final control element’). Es el dispositivo que cambia
directamente el valor de la variable manipulada de un circuito de control.
¾ Elemento primario (‘primary element’). Es la parte del circuito de un instrumento
que primero detecta el valor de una variable de proceso y cuya salida asume un
estado predeterminado o intangible que corresponde al valor de la detección. El
elemento primario también se conoce como detector o sensor. Puede estar integrado
con otros elementos funcionales de un circuito.
¾ Estación de carga manual (‘manual loading station’). Instrumento con una salida
ajustable manualmente que se utiliza para actuar uno o más dispositivos remotos.
Aunque estos últimos pueden ser elementos controladores para un circuito de control,
la estación no se emplea como unidad selectora automática / manual. La estación
puede tener indicadores, luces y otros aditamentos integrales. También se conoce
como estación manual o cargador manual remoto.
¾ Estación de control (‘control station’). Es una estación de carga manual que tiene
un conmutador selector automático /manual para un circuito de control. También se
conoce como estación automática/manual o estación selectora automática.
¾ Escrutar (‘sacn’). Muestrear cada una de un número de entradas en forma
intermitente. Un escrutador puede tener funciones adicionales, tales como el registro
o alarma.
¾ Funcion (‘function’). Es el propósito de, o la acción realizada por, un dispositivo.
¾ Identificación (‘ identification’). Secuencia de letras, dígitos, o ambos, que se
emplea para designar un instrumento particular o un circuito.
¾ Instrumentación (‘instrumentation’). Es la aplicación de los instrumentos.
¾ Instrumento (‘instrument’). Dispositivo usado directa o indirectamente para medir o
controlar, o ambos, una variable. El término incluye válvulas de control, válvulas de
alivio y dispositivos eléctricos tales como anunciadores y botones de contacto, pero
no se aplica a los componentes internos de un instrumento como serían fuelles
receptores, resistencias, etc.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
23
ACADEMIA DE BIOINSTRUMENTACIÓN
¾ Interruptor (‘switch’). Dispositivo que conecta, desconecta o transfiere uno o más
circuitos y que no se identifica como un controlador, revelador o válvula de control.
¾ Local (‘local’). Es la ubicación de un instrumento que no esta ni al frente ni atrás del
tablero. Los instrumentos locales generalmente se encuentran cerca de un elemento
primario o de un elemento final de control.
¾ Luz piloto (‘pilot light’). Luz que indica la existencia de algunas de las condiciones
normales posibles del sistema o dispositivo. Es diferente a la luz de alarma, ya que
ésta indica una condición anormal. La luz piloto también se conoce como luz
monitora.
¾ Medición (‘measurement’) . Es la determinación de la existencia o magnitud de una
variable. los instrumentos de medición incluyen todos los dispositivos que se emplean
directamente o indirectamente para este propósito.
¾ Montado en tablero (‘ borad-mounted’). Término aplicado a un instrumento que se
encuentra instalado en un tablero y que es accesible al operador para su uso normal.
¾ Proceso (‘process’). Cualquier operación o secuencia de operaciones que
involucran un cambio de energía, composición, dimensiones o de cualquier otra
propiedad que se pueda definir con respecto a una referencia. En esta norma, el
término “proceso” se utiliza para aplicarlo a todas las variables que no sean señales e
instrumentos.
¾ Punto de prueba (‘test point’). Conexión a proceso en la cual no hay instrumento
permanente, pero cuyo propósito es que sirva como conexión temporal, intermitente o
futura.
¾ Relevador (‘relay’). Dispositivo que recibe información en forma de señales de uno o
más instrumentos, modifica la información o su forma, o ambas, si se requiere, emite
una o más señales de salida resultantes y no se le identifica como controlador,
interruptor, conmutador, ni de otra forma. El término revelador también se aplica
específicamente a un interruptor eléctrico accionado remotamente por una señal
eléctrica. Sin embargo, para los propósitos de esta norma, su significado no es tan
restringido ya que se utilizan para designar funciones que realizan los relevadores.
¾ Relevador computador (‘computing relay’). Es un relevador que realiza uno o más
cálculos o funciones lógicas, o ambos, y emite una o más señales de salida
resultantes.
¾ Tablero (‘board’). Estructura que tiene un grupo de instrumentos montados en ella, y
una identificación individual. El tablero puede consistir de una o más secciones
componentes, escritorios, consolas y bastidores.
¾ Tablero local (‘local board’). Estos tableros, entre los que se encuentran el principal
o central, comúnmente se localiza cerca de subsistemas o sub-áreas de la planta.
¾ Telemedición (‘telemetering’). Es la práctica de transmitir y recibir la medición de
una variable para lectura u otros usos. El término se aplica con más frecuencia a
sistemas de señales eléctricas.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
24
ACADEMIA DE BIOINSTRUMENTACIÓN
¾ Transductor (‘transducer’). Término general para un dispositivo que recibe
información en la forma de una o más cantidades físicas, modifica la información o su
forma, o ambas, si se requiere, y emite una señal de salida resultante. Dependiendo
de la aplicación, el transductor puede ser un elemento primario, un transmisor, un
relevador, un convertidor u otro dispositivo.
¾ Transmisor ( ‘transmitter’). Dispositivo que detecta una variable de proceso por
medio de un elemento primario y que tiene una salida cuyo valor en el estado estable
cambia únicamente en función de la variable de proceso en forma predeterminada.
El elemento primario puede o no estar integrado al transmisor.
¾ Válvula de control (‘control valve’). Dispositivo diferente a la válvula común de dos
posiciones operad manualmente, que manipula en forma directa al flujo de uno o más
corrientes del fluido de proceso. En algunas aplicaciones se le conoce también como
compuerta (‘damper’) o persiana(‘lover’).
¾ Variable de proceso (‘process variable’). Es cualquier propiedad variable de un
proceso.
1.6
NOMENCLATURA Y SIMBOLOGÍA.
Para identificar un instrumento se usan de dos a cuatro letras mayúsculas, con las cuales
se puede identificar la variable del instrumento, la función del instrumento y su acción. En la
tabla se listan los significados de cada una de las letras de las cinco columnas, usando las
columnas de izquierda a derecha y solamente una vez., por ejemplo TCR-12ª tiene el
siguiente significado.
¾ T =>
Es temperatura (primera columna).
¾ R =>
¾ C =>
No aparece en la segunda columna por lo tanto pasa a la tercera y
significa registro.
Aparece en la cuarta columna y significa controlar.
¾ 12A=> Significa numero de circuitos de control considerando a la letra A como
subdivisión de circuito, la letra A no es obligatorias en la nomenclatura.
Notas aclaratorias sobre la aplicación de dicho significado, las cuales se enlistan a
continuación:
1.- Elección del usuario significa que la letra debe usarse para cubrir significados no
enlistados y que vayan a emplearse repetitivamente en un proyecto en particular. Los
significados se definen una sola vez en la leyenda del proyecto.
Por ejemplo, la letra N puede definirse como módulo de elasticidad como primera
letra, y osciloscopio como siguiente letra.
2.- No clasificada X significa que se usa para cubrir ciertos significados que se utilicen una
sola vez o muy limitadamente, por ejemplo XR-2 puede ser registrador de esfuerzos, XR-3
uno de vibración, XX-4 un osciloscopio de esfuerzos.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
25
ACADEMIA DE BIOINSTRUMENTACIÓN
3.- La forma gramatical de las siguientes letras puede modificarse según se requiera. Por
ejemplo, “indicador” o “indicación”, “transmitir” o “transmisor”, etc.
4.- Cualquier primera letra si se utiliza en combinación con las letras modificantes (segunda
columna) deberá considerarse que representa una nueva variable, de este modo T significa
temperatura, y TD temperatura diferencial.
5.- La primer letra A para análisis, cubre todos los análisis que no están en la tabla1.1., y que
no estén cubiertos por una letra de elección del usuario. En los diagramas, el tipo de análisis
se debe definir en cada caso fuera del círculo.
6.- El uso de la primera letra U para multivariable en lugar de una combinación de las
primeras letras, es opcional.
7.- Se prefiere el uso de los términos modificantes Alto, Bajo, Medio y Escrutar, pero es
opcional.
8.- El termino se seguridad se aplicará únicamente en protectores de emergencia. De este
modo, una válvula auto-operada que controla la descarga del fluido, será PCV, aun cuando
la válvula no será un PSV si se requiere que proteja contra condiciones de emergencia, es
decir, contra condiciones peligrosas para el personal, el equipo o ambos que no se espera
que surjan normalmente.
9.- La función de la pasiva MIRILLA, se aplica a todos los instrumentos que proporcionan
una vista directa y no calibrada del proceso.
10.- El término INDICACIÓN, se refiere únicamente a la presentación de otro dato de una
medición real. No se aplica a una escala de ajuste manual de una variable.
11.- Una luz piloto que forme parte del circuito de instrumentos deberá designarse mediante
la primera letra seguida por la letra L; por ejemplo, KL indica la terminación de un período de
tiempo.
L significa motor eléctrico operando. O como XL suponiendo que la luz sea activada
por contactos eléctricos auxiliares del arrancador de motor.
Sin embargo, sise desea identificar una luz piloto que no sea parte del circuito formal
de instrumentos, esta se podrá representar en la misma manera o alternativamente,
mediante una sola letra L. La acción de una luz piloto puede ir acompañada de una señal
audible.
12.- El uso de la siguiente letra U para multifunción, en lugar de una combinación de otras
letras funcionales es opcional.
13.- Un dispositivo que conecta, desconecta o transfiere uno o más circuitos puede ser un
conmutador, un interruptor, un revelador, un controlador de dos posiciones o
excepcionalmente una válvula de control, dependiendo de la aplicación.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
26
ACADEMIA DE BIOINSTRUMENTACIÓN
Generalmente se usa “conmutador” si es operado manualmente. Se usa “interruptor”
o “controlador de dos posiciones” si es automático y además es el primer dispositivo del
circuito.
Ese término se usa generalmente si el dispositivo emplea para alarma, luz piloto,
selección e interconexión o seguridad. Se usa “revelador” si es automático y no es el primer
dispositivo en el circuito, es decir, si es accionado por un interruptor o controlador de dos
posiciones.
14.- Se espera que las funciones asociadas con el uso de la letra siguiente. Y se definan
fuera del círculo el diagrama cuando resulte conveniente. Esto no necesita hacerse cuando
la función sea evidente, como en el caso de las válvulas de selenoide.
15.- El uso de los términos modificantes Alto, Bajo y Medio deberá corresponder a los
valores de la variable medida, no de la señal. Por ejemplo, un alambre de alto nivel derivada
de la señal se vaya a un valor extremo.
16.- Los términos Alto y Bajo cuando se aplique a posiciones de válvulas y otros dispositivos
de apertura y cierre se define como sigue: “Alto” denota que la válvula está en, o cerca de ,
la posición de apertura y “Bajo” denota que está en , o cerca de , La posición del cierre total.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
27
ACADEMIA DE BIOINSTRUMENTACIÓN
Tabla 1.1 Significado de letras de identificación.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
28
ACADEMIA DE BIOINSTRUMENTACIÓN
Símbolos de líneas de instrumentación.
Estas líneas serán siempre más finas que las líneas de tubería de proceso.
A) Conexión a proceso, unión mecánica o suministro a instrumentos.
B) Señal neumático, incluido cualquier gas que no sea aire.
C) Señal eléctricas.
D) Tubo capilar (sistema lleno).
E) Señal hidráulica.
F) Señal electromagnética o sónica.
Figura 1.4 Símbolos de líneas de instrumentación
Se sugiere las siguientes abreviaturas para indicar los tipos de suministro de energía.
Estas abreviaturas también pueden aplicarse a suministros de fluidos de purga.
SA
SE
SG
SH
SN
SD
SH2O
Suministro de aire.
Suministro eléctrico.
Suministro de gas.
Suministro hidráulico.
Suministro de Nitrógeno.
Suministro de vapor.
Suministro de agua.
Símbolos de instrumentos.
Los instrumentos se simbolizan con un círculo de 11mm de diámetro
aproximadamente, dentro de este círculo deberán ir de las letras y números que se
identifiquen con dicho instrumento, en caso de que el instrumento tenga una doble función;
por ejemplo, un instrumento que tenga dos controladores se deben usar dos círculos
tangenciales utilizando una clave para cada uno de ellos.
MA. DE LOURDES CORTÉS IBARRA/RIGOBERTO GARIBAY SÁNCHEZ
29