14 Transmisión de Señales de TV Digital por Satélite, DVB-S
Anuncio

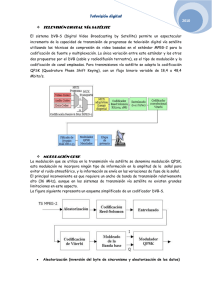
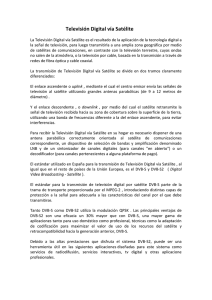
14 Transmisión de Señales de TV Digital por Satélite, DVB-S Hoy, las señales de televisión analógicas son ampliamente recibidas por satélite ya que este tipo de instalación se ha vuelto sumamente simple y barata. En Europa un sistema simple de recepción satelital completo con plato, LNB y receptor está disponible por menos de 100 Euros y sin gastos de permanencia. Por consiguiente, debe otorgarse similar importancia a la distribución de señales de TV digital por la misma vía de transmisión. En este capítulo se describe el método de transmitir vía satélite señales fuente de TV codificadas en MPEG-2. Cálculo de la fuerza centrífuga F1: 𝐹𝐹1 = 𝑚𝑚𝑠𝑠𝑠𝑠𝑠𝑠 × 𝜔𝜔2 × 𝑟𝑟; m sat = masa _ del _ satélite ; ω =2 ×π × T1 =velocidad _ angular ; = π 3,141592654 = const _ circular ; T = 1día = 24 × 60 × 60s = 86400s ; Fig. 14.1. Fuerza centrífuga de un satélite geoestacionario Cada satélite geoestacionario de comunicaciones se ubica sobre el ecuador en una órbita de aproximadamente 36.000 Km sobre la superficie de la Tierra. Esto significa que estos satélites se posicionan de tal manera que se mueven alrededor de la Tierra a la misma velocidad angular con que la propia Tierra está girando, es decir una vez por día. Hay esencialmente sólo una única posición orbital, a una distancia constante de aproximadamente 36.000 Km de la superficie de la Tierra donde esto puede lograrse, el único punto en que la fuerza centrífuga del satélite y la atracción gravitatoria de la Tierra se cancelan. Sin embargo, varios satélites pueden posicionarse a varios grados de longitud, es decir a posiciones angulares sobre la superficie de la Tierra. Por ejemplo, Astra se posiciona a 19,2° hacia el Oeste. Es debido a esta posición de los satélites sobre el ecuador que todas las antenas receptoras del satélite apuntan al Sur en el hemisferio Norte, y hacia el Norte en el hemisferio Sur. 14 - 2 Transmisión de Señales de TV Digital por Satélite, DVB-S Cálculo de la fuerza centrípeta F2: 𝐹𝐹2 = 𝛾𝛾 × 𝑚𝑚 𝑇𝑇𝑇𝑇𝑇𝑇𝑇𝑇𝑇𝑇𝑇𝑇 × 𝑚𝑚𝑆𝑆𝑆𝑆𝑆𝑆 × 1 𝑟𝑟 2 F2 ; mTIERRA = masa _ de _ la _ tierra ; 𝛾𝛾 = 𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐_𝑑𝑑𝑑𝑑_𝑔𝑔𝑔𝑔𝑔𝑔𝑔𝑔𝑔𝑔𝑔𝑔𝑔𝑔𝑔𝑔𝑔𝑔𝑜𝑜́ 𝑛𝑛 = 6,67 × 10−11 Satélite r Tierra 𝑚𝑚 3 𝑘𝑘𝑘𝑘 ×𝑠𝑠 2 ; Fig. 14.2. Fuerza centrípeta actuando sobre un satélite geoestacionario Condición de Balance: fuerza centrífuga F1 = fuerza centrípeta F2 F1 = F2 ; 1 𝑚𝑚𝑆𝑆𝑆𝑆𝑆𝑆 × 𝜔𝜔2 × 𝑟𝑟 = 𝛾𝛾 × 𝑚𝑚 𝑇𝑇𝑇𝑇𝑇𝑇𝑇𝑇𝑇𝑇𝑇𝑇 × 𝑚𝑚𝑆𝑆𝑆𝑆𝑆𝑆 × 𝑟𝑟 2 ; 1 1 F2 F1 Satélite 𝑟𝑟 = (𝛾𝛾 × 𝑚𝑚 𝑇𝑇𝑇𝑇𝑇𝑇𝑇𝑇𝑇𝑇𝑇𝑇 × 𝜔𝜔 2 )3 ; r = 42220km ; d= r − rTIERRA = 42220km − 6370km = 35850km ; Fig. 14.3. Condición de equilibrio Los datos orbitales de un satélite geoestacionario pueden calcularse en base a las siguientes relaciones: El satélite se mueve a una velocidad de un día por órbita alrededor de la Tierra. Esto produce la consiguiente fuerza centrífuga. El satélite es atraído por la Tierra con una fuerza gravitatoria particular de atracción debido a su altura orbital: Las dos fuerzas, la fuerza centrífuga y la fuerza centrípeta, deben estar en equilibrio. Según esto, es posible determinar la órbita de un satélite geoestacionario (Fig. 14.1. a 14.3.) Comparado con la órbita de una lanzadera espacial, que es de unos 400 kilómetros sobre la superficie de la tierra, los satélites geoestacionarios están mucho más distantes de la tierra, cerca de un décimo del trayecto a la luna. Los satélites geoestacionarios, acarreados por la lanzadera espacial o por sistemas portadores similares, deben primero ser empujados hacia esta órbita distante encendiendo cohetes auxiliares (motores de apogeo). De allí, nunca jamás regresarán nuevamente a la atmósfera de la tierra. Por el contrario, poco antes de que sus reservas del combustible para las correcciones de trayectoria se agoten, deben ser sacados de la órbita hacia el denominado “cementerio de satélites” que es una órbita aún más lejana. Solamente los 14 - 3 satélites cercanos a la tierra en una órbita no-estacionaria se pueden “recuperar” nuevamente. Como comparación – el periodo orbital de los satélites cercanos a la tierra que, en principio, también incluyen a la Estación Espacial Internacional ISS o la lanzadera espacial, es cerca de 90 minutos por órbita a aproximadamente 27.000 Km/h. 10 00 11 01 Fig. 14.4. Parámetros de modulación en DBV-S (QPSK, código Grey) Pero ahora regresemos al DVB-S. En principio, los mismos sistemas satelitales pueden usarse para transmitir ambas señales de TV, analógicas y digitales. Sin embargo, en Europa las señales digitales se localizan en una banda de frecuencia diferente, mientras que las bandas de frecuencia de satélite anteriores todavía están ocupadas con la televisión analógica. En Europa pueden recibirse vía satélite alrededor de cien programas tanto de señales analógicas como digitales y la mayoría de éstas son completamente libres. En las siguientes secciones, se describen las técnicas para transmitir televisión digital vía satélite. Este capítulo también forma la base para entender la televisión terrestre digital (DVB-T). Ambos sistemas hacen uso de los mismos algoritmos y de las mismas protecciones del error pero en DVB-T se utiliza un método de modulación mucho más elaborado. El método de transmisión DVB-S está definido en la Norma ETSI, ETS 300421 “Sistemas de Radiodifusión Digital por Televisión, Servicios de Sonido y Datos; Estructura de Cuadros, Codificación de Canales y Modulación para Servicios Satelitales en 11/12 GHz” que fue adoptada en 1994. 14.1 Parámetros del Sistema DVB-S El método de modulación seleccionado para el DVB-S fue el de Cuadratura de Fase (QPSK: Quadrature Phase Shift Keying). Durante algún tiempo también se consideró el uso de modulación 8-PSK en lugar de QPSK para aumentar la tasa de datos. En principio, la transmisión satelital requiere de un método de modulación que sea relativamente inmune al ruido y, al mismo 14 - 4 Transmisión de Señales de TV Digital por Satélite, DVB-S tiempo ser capaz de manejar severas no-linealidades. Debido a la inmensa distancia de 36.000 Km entre el satélite y la antena receptora, la transmisión satelital está sujeta a severas interferencias de ruido causadas por la atenuación de espacio-libre de aproximadamente 205 dB. El elemento activo en un transpondedor satelital es un amplificador valvular de onda progresiva (TWA: Traveling Wave tube Amplifier) que presenta no-linealidades severas en su característica de amplificación. No es posible compensar estas nolinealidades ya que implicarían una disminución en la eficiencia de la energía. Durante la luz del día, las celdas solares proporcionan la energía a la electrónica del satélite y cargan las baterías. Durante la noche, la energía para la electrónica proviene exclusivamente de las baterías auxiliares. Por consiguiente, si se tienen fuertes no-linealidades, no debería haber ninguna información en la amplitud de la señal modulada. En ambos tipos, QPSK y 8PSK, el contenido de la información está exclusivamente en la fase. También, por esta razón, en la transmisión satelital de TV analógica se usó la modulación de frecuencia en lugar de la modulación de amplitud. Un canal satelital de un satélite de radiodifusión directa normalmente tiene una anchura de 26 a 36 MHz (por ejemplo 33 MHz en el Astra 1F, 36 MHz en el Eutelsat Hot Bird 2), la transmisión hacia satélite está en la banda de 14 a 19 GHz y la bajada en 11 a 13 GHz. Por consiguiente es necesario seleccionar una Tasa de Símbolo que produzca un espectro que sea más estrecho que el ancho de banda del transpondedor. Por esta razón, la tasa de símbolos seleccionada es a menudo 27,5 MS/s. Como la QPSK permite la transmisión de de 2 bits por símbolo, se obtiene una tasa bruta de datos de 55 Mb/s. tasa_bruta_de_datos = 2 bits/símbolo × 27,5 MS/s = 55 Mb/s; Sin embargo, el Flujo de Transporte del MPEG-2 a ser enviado al satélite como una señal modulada QPSK debe ser primero provisto con una protección de errores antes de que pueda aplicarse al modulador real. En DVB-S se usan dos mecanismos de protección de error, a saber, un código de bloque Reed-Solomon que es empatado con una codificación convolucional (Trellis). En el caso de la protección de errores Reed-Solomon, ya conocida de los CD de audio, los datos se congregan en paquetes de una cierta longitud y éstos están provistos de un checksum especial de una longitud particular. Este checksum (suma de verificación) no sólo permite descubrir los errores sino que también se pueden corregir un cierto número de errores. El número de errores que pueden corregirse es una función directa de la longitud del checksum. En Reed-Solomon, el número de errores reparables siempre corresponde a exactamente la mitad de los bytes de la protección de errores (checksum). 14 - 5 Tasa de Datos de Entrada x 204/188 x2 x(1.5-Tasa de Código) = Tasa de Datos de Salida: [2.17… (1.63) ...1.36] FEC1/ codificador exterior TS in Interfaz de Banda Base Inversor de Sincronización Disperción de Energía Codificador ReedSolomon FEC2/ codificador interior Interpolador Convolucional Conversor Convolucional I Salida de Datos Codificados Perforado Sinc. Inv. Q Sincronización Idem a DVB-C Code rate ½ … (3/4) … 7/8 Fig. 14.5. Pre-corrección de errores (FEC) en DVB-S y DVB-T. Primera parte de un modulador DVB-S Es siempre posible considerar a un paquete del Flujo de Transporte exactamente como un bloque de datos y resguardar este bloque con la protección de errores Reed-Solomon. Un paquete del Flujo de Transporte MPEG-2 tiene una longitud de 188 bytes. En DVB-S, se añaden 16 bytes de protección de error Reed-Solomon para formar un paquete de datos de 204 bytes de longitud. Esto se llama codificación RS (204,188). Al lado del receptor, hasta 8 errores pueden corregirse en este paquete de 204-bytes de largo. La posición de este/estos error/es no es relevante. Si hay más de 8 errores en un paquete, esto todavía puede detectarse fiablemente pero ya no será posible corregir estos errores. El paquete de Flujo de Transporte se marca entonces como ‘errado’ por medio del indicador de error de transporte en el encabezado del Flujo de Transporte. Este paquete es desechado por el decodificador MPEG2. La protección de errores Reed-Solomon reduce la tasa de datos: tasa_neta_de_datos Reed-Solomon = tasa_bruta_de_datos × 188/204 = 55 Mb/s × 188/204 = = 50,69 Mb/s; Sin embargo, la simple protección de errores no sería suficiente para la transmisión por satélite por lo que una protección de error adicional en la forma de codificación convolucional se inserta después de la protección de errores Reed-Solomon. Esto incrementa aún más el flujo de datos. Esta expansión se hace controlable por medio de un parámetro, la Relación de Código (FEC). La Relación de Código describe la relación entre la tasa de datos de entrada y la tasa de datos de salida de este segundo bloque de corrección de errores: 14 - 6 Transmisión de Señales de TV Digital por Satélite, DVB-S tasa _ de _ codificación = tasa _ de _ datos _ de _ entrada ; tasa _ de _ datos _ de _ salida En DVB-S, la Relación de Código puede seleccionarse dentro del rango de 1/2, 3/4, 2/3, … 7/8. Si la Relación de Código es 1/2, el Flujo de Datos se incrementa por un factor de 2. La protección de errores es ahora máxima y la Tasa de Datos neta ha caído a un mínimo. Una Relación de Código de 7/8 proporciona no sólo una sobretasa mínima sino también una mínima protección de errores. Por consiguiente, la Tasa de Datos neta disponible es máxima. Normalmente un compromiso bueno es una Relación de Código de 3/4. La Relación de Código puede luego usarse para controlar la protección de errores y así, recíprocamente, también la Tasa de Datos neta. La Tasa de Datos Netos en DVB-S con una Relación de Código de 3/4, después de la codificación convolucional, está dada por: tasa_neta_de_datos DVB-S 3/4 = tasa_de_codificación × tasa_neta _de_datosR-S = 3/4 × 50,69 Mb/s = 38,01 Mb/s ; 14.2 El Modulador DVB-S La descripción siguiente trata en detalle todos los elementos de un modulador DVB-S. Ya que esta parte del circuito también se encuentra en el modulador DVB-T, se recomienda leer esta sección junto con la que sigue. La primera etapa de un modulador DVB-S (Fig. 14.5.) es la Interfaz de Banda Base. Aquí es donde la señal se sincroniza con el Flujo de Transporte MPEG-2. Este Flujo de Transporte MPEG-2 consiste en paquetes con una longitud constante de 188 bytes, consistiendo en 4 bytes de encabezado y 184 de bytes carga útil; el encabezado empieza con un Byte de Sincronización. Este tiene un valor constante de 0x47 y continua a intervalos constantes de 188 bytes. En la interfaz de la banda base, la señal es sincronizada a la estructura de este byte de sincronización. La sincronización ocurre dentro de aproximadamente 5 paquetes y todas las señales de reloj se derivan de ésta. En el próximo bloque, la Unidad de Dispersión de Energía, cada octavo byte de sincronización es primero invertido. Es decir, 0x47 se vuelve 0xB8 luego de inversión de bits. Los otros 7 bytes de sincronización entre éstos permanecen inalterados. Usando esta inversión del byte de sincronización, se insertan luego marcas de tiempo adicionales dentro de la señal de datos que son ciertas marcas de tiempo largas, por encima de 8 paquetes, comparadas 14 - 7 con la estructura del Flujo de Transporte. Estas marcas de tiempo se necesitan para restablecer los procesos en el bloque de dispersión de energía en ambos lados, transmisión y recepción. Esto, a su vez significa que ambos, el modulador o transmisor y el demodulador o receptor, reciben transparentemente esta tanda de ocho paquetes de la inversión del byte de sincronización en el Flujo de Transporte y los usan para controlar ciertos pasos del proceso. Puede suceder que una tanda relativamente larga de ceros o unos ocurra en forma completamente accidental en una señal de datos. Sin embargo, esto no se desea ya que no contienen ninguna información de reloj o causan líneas espectrales discretas sobre un período particular. Para eliminarlos, virtualmente cada método de transmisión digital aplica la dispersión de energía antes de la modulación real. Mapeador √cos2 x + FIR Pasabajo x Pasabanda x OL2 90° OL1 Fig. 14.6. Segunda parte de un modulador DVB-S, 7 0x47 0x47 0x47 0x47 0x47 0 1 2 0x47 4 0x47 3 0x47 2 0xB8 1 0xB8 0 0x47 Byte de Sincronización Paquete del Flujo de Transporte MPEG-2 Fig. 14.7. Inversión del byte de sincronización Para lograr la dispersión de energía, se genera primero una secuencia de bits pseudo-aleatoria (PRBS) (Fig. 14.8.) la cual, sin embargo, se reinicia una y otra vez de una manera definida. En DVB-S, el arranque y el restablecimiento toman lugar siempre que un byte de sincronización esté invertido. El Flujo de Datos es entonces mezclado con la sucesión pseudo-aleatoria 14 - 8 Transmisión de Señales de TV Digital por Satélite, DVB-S por medio de un OR Exclusivo que rompe sucesiones largas de unos o ceros. Si este Flujo de Datos de energía-dispersa es nuevamente mezclado con la misma secuencia pseudo-aleatoria en el receptor, la dispersión es de nuevo cancelada. El receptor contiene un circuito idéntico, consistente en un registro de desplazamiento de 15-etapas con realimentación que es cargado de una manera definida con una palabra inicial siempre que ocurra un byte de sincronización invertido. Esto significa que los dos registros de desplazamiento en el transmisor y en el receptor están operando completamente en sincronía y se sincronizan por la sucesión de 8 paquetes del bloque de inversión del byte de sincronización. Esta sincronización sólo es posible porque los bytes de la sincronización y los bytes de la sincronización invertidos atraviesan completa y transparentemente y no son mezclados con la secuencia de bits pseudoaleatoria. 1 0 0 1 0 1 0 1 0 0 0 0 0 0 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 =1 & Habilitar / deshabilitar aleatorización =1 Entrada de datos MPEG-2 Salida aleatoria de datos / sincronización transparente Fig. 14.8. Etapa de dispersión de energía (randomizer) La próxima etapa contiene el Codificador Exterior (Fig. 14.5. y 14.9.), la protección de errores Reed-Solomon. A estas alturas, 16 bytes de protección de errores se añaden a los paquetes de datos que todavía son de 188 bytes de largo pero ahora de energía-dispersa. Los paquetes tienen una longitud de 204 bytes que hacen posible corregir hasta 8 errores en el receptor. Si hay más errores, la protección de errores falla y el paquete se marca como errado en el demodulador por el indicador de error de transporte en el encabezado del Flujo de Transporte poniéndose en “uno”. Sin embargo, frecuentemente ocurren errores de ráfaga durante una transmisión. Si se producen más de 8 errores en un paquete protegido por codificación Reed-Solomon, la protección de errores de bloque fallará. Los datos son, por consiguiente, intercalados, es decir distribuidos dentro de un cierto período de tiempo en un paso operativo posterior. Cualquiera de los errores de ráfaga presentes es luego roto por el des- 14 - 9 intercalador (Fig. 14.10.) en el receptor y son distribuidos dentro de varios paquetes del Flujo de Transporte. Después será más fácil corregir estos errores de ráfaga que ahora se han vuelto errores simples y no se requiere ningún dato adicional. Transporte MPEG-2 Enlace Transmisión DVB Demod. DVD Mod. RS Transporte MPEG-2 RS 204 bytes 16 bytes RS FEC 184 bytes Carga útil 4 bytes encabezado 188 bytes Fig. 14.9. Codificación Reed-Solomon En DVB-S, el intercalado se hace en un así llamado Intercalador Forney (Fig. 14.11.) que está compuesto de dos interruptores giratorios y varios registros de desplazamiento. Esto asegura que los datos se revuelvan, y así distribuirlos, tan “des-sistemáticamente” como sea posible. El máximo intercalado está por encima de 11 paquetes del Flujo de Transporte. Los bytes de sincronización y los bytes invertidos de sincronización siguen siempre una ruta particular precisa. Esto significa que la velocidad de rotación de los interruptores corresponde a un múltiplo exacto de una longitud de paquete y el intercalador y el des-intercalador están síncronos con el Flujo de Transporte MPEG-2. Error de ráfaga 1 2 3 4 5 Error simple 6 Des-intercalador en el receptor 4 2 5 Fig. 14.10. Des-intercalador 1 3 6 14 - 10 Transmisión de Señales de TV Digital por Satélite, DVB-S I=12; M=204/I=204/12=17 Ruta de sincronizacion Intercalador Des-intercalador M M I Rutas 1 paso por byte 2M 8 bit 2M 8 bit 3M 8 bit 3M (I-2)M (I-2)M (I-1)M (I-1)M n Max. Retardo = M(I-1)I = 2244Bytes = 11 paquetes del FT Fig. 14.11. Intercalador y Des-intercalador Forney La etapa siguiente del modulador es el Codificador Convolucional (codificador Trellis). Esta etapa representa la segunda y así llamada Protección de Errores Interna. El codificador convolucional (Fig. 14.11.) tiene una estructura relativamente simple pero entenderlo no es realmente fácil. + rBit T + + T T + XOR T + + Registro de desplazamiento rBit T T + + salida1 Perforador Codificador Convolucional rsal > rBit rBit salida2 Tasa de codificación = 1/2, … 7/8 Fig. 14.12. Codificador convolucional en DVB-S y DVB-T El codificador convolucional consiste en un registro de desplazamiento de 6-etapas y dos rutas de señal en que la señal de entrada es mezclada con el contenido del registro de desplazamiento en ciertas derivaciones. El Flujo de Datos de entrada es dividido en 3 flujos de datos. Los datos primero pasan a través del registro de desplazamiento dónde ellos influyen en los flujos de datos superior e inferior del codificador convolucional por una operación OR Exclusivo que dura 6 ciclos del reloj. Esto dispersa la información de un bit 14 - 11 sobre 6 bits. En puntos específicos en ambas rutas de datos, superior e inferior, hay compuertas XOR que mezclan los flujos de datos con los contenidos del registro de desplazamiento. Esto proporciona dos flujos de datos a la salida del codificador convolucional, cada uno de los cuales muestra la misma tasa de datos que la señal de entrada. Adicionalmente, al Flujo de Datos se le proporcionó sólo una memoria particular que se extiende por encima de los 6 ciclos del reloj. La Tasa de Datos total a la salida es ahora dos veces más alta que la de los datos de la entrada que corresponde a una Relación de Código = 1/2. Un techo de 100 % se le ha agregado a la señal de datos. 14.3 Codificación Convolucional Cada codificador convolucional (Fig. 14.12.) consiste en etapas con mayor o menor retardo y con la memoria que, en la práctica, se lleva a cabo usando registros de desplazamiento. En DVB-S, y también en DVB-T, se decidió usar un registro de desplazamiento de seis-etapas con 5 derivaciones cada uno en las rutas superior e inferior. Los flujos de bits retardados tomados de estas derivaciones son XOR con el flujo de bits no-retrazados, resultando así dos salidas de flujos de datos, sujetos a una así llamada “convolución”, cada una con la misma tasa de datos que la tasa de datos de entrada. Una convolución ocurre siempre que una señal se “manipula” a sí misma, retardada en el tiempo. entrada R1 XOR XOR + + salida1 + salida2 R2 XOR Fig. 14.13. Ejemplo de un Codificador Convolucional de 2 etapas Un filtro digital (FIR) también realiza una convolución. Tomaría demasiado tiempo analizar directamente el codificador convolucional usado en DVBS y en DVB-T dado que, debido a sus seis etapas, tiene una memoria de 26 = 64. Por ende, reduciéndolo a un codificador de muestra que tenga sólo dos etapas sólo necesitamos observar los 22 = 4 estados. El registro de desplazamiento puede asumir los estados interiores 00, 01, 10 y 11 (Fig. 14.12.). Para probar el comportamiento del arreglo del circuito es necesario aplicar luego un cero y un uno en el registro de desplazamiento para cada uno de estos 4 estados y luego analizar el estado resultante y también calcular las señales de 14 - 12 Transmisión de Señales de TV Digital por Satélite, DVB-S salida debido a los OR Exclusivos. Por ejemplo, si se introduce un cero en el registro de desplazamiento que tiene un valor actual de 00, el nuevo valor resultante también será 00 ya que un cero es desplazado hacia afuera y al mismo tiempo un nuevo cero es desplazado hacia adentro. En la ruta superior de la señal, las dos operaciones del XOR producen un resultado global de 0 a la salida. Lo mismo se aplica a la ruta inferior. Si se aplica un uno en el registro de desplazamiento que contiene 00, el nuevo estado será 10 y un uno se obtiene como señal de salida tanto en la ruta superior de la señal como en la inferior. Los otros tres estados pueden funcionar de la misma manera aplicando un uno y un cero en cada caso. Los resultados se muestran en la Fig. 14.14. El resultado total del análisis puede ilustrarse más claramente en un diagrama de estados (Fig.14.15.) en dónde se ingresan los cuatro estados interiores del registro de desplazamiento en los círculos. [0] + [0] + [0] ent[0] o[0] n[0] [0] + [1] ent[0] + sal2 [0] + sal1 [1] o[0] n[1] [0] + [0] ent[0] [0] [0] sal2 [0] + sal1 [1] + [1] o[1] n[0] sal2 [1] + sal1 [0] o[0] n[1] + [1] [0] + sal2 [1] o[1] n[1] sal2 [1] + o[1] n[0] [1] ent[1] sal1 [0] sal1 [0] [1] o[0] n[1] [1] sal2 [1] + + [0] [1] + sal2 [0] + [0] [1] + + [0] o[1] n[1] [1] [0] [0] [1] ent[1] + o[1] n[1] + [1] sal1 [1] [0] [0] [1] [0] ent[0] [1] ent[1] + o[1] n[0] o[0] n[0] [1] [1] o[0] n[0] + [1] [0] [0] [1] [0] o[0] n[1] [0] o[1] n[0] [0] ent[1] [0] [0] + [0] [0] o[0] n[0] [0] [1] sal1 [0] sal1 [1] [1] o[1] n[1] [1] [1] + sal2 [0] Fig. 14.14. Estados del Codificador Convolucional de muestra (o[] = estado anterior, n[] = nuevo) 14 - 13 El bit menos significativo es ingresado a la derecha y el más significativo a la izquierda lo que significa que el arreglo del registro de desplazamiento tiene que ser imaginado invertido. Las flechas entre estos círculos marcan las posibles transiciones de estado. Los números al lado de los círculos describen el bit de estímulo pertinente y los bits de salida del arreglo, respectivamente. Puede verse claramente que no todas las transiciones entre los estados individuales son posibles. Así, es imposible, por ejemplo, pasar directamente de 00 a 11 sin primero pasar, por ejemplo a través del estado 01. 1/10 11 1/01 01 1/11 x/yy x = datos ent. y = datos sal. (sal1 , sal2) 0/01 0/10 1/00 00 10 0/11 zz , Estado interno del registro, derecha = LSB Izquierda = MSB 0/00 Fig. 14.15. Diagrama de estado del codificador convolucional de muestra Trazando las transiciones de estado permitidas contra el tiempo resulta el denominado diagrama de Trellis (espaldera). Dentro del diagrama de Trellis, es sólo posible seguir ciertos caminos o ramas; ya que no son posibles todos los caminos a través de Trellis. En muchas regiones rurales, ciertas plantas (árboles frutales, viñedos) se siembran para crecer a lo largo de enrejados en una pared. Les obligan así a que crezcan de una manera ordenada de acuerdo con un patrón particular siendo fijados a ciertos puntos en la pared. Sin embargo, a veces sucede que algunos de esos puntos se rompen debido al mal tiempo, y el enrejado queda en desorden. El patrón existente hace posible, sin embargo, indagar dónde la rama podría haber estado y acomodarla nuevamente. Lo mismo pasa con nuestros flujos de datos después de la transmisión, dónde los flujos del datos codificados convolucionalmente pueden haber sido forzados fuera del ‘enrejado’ debido a errores de bit causados, por ejemplo, por el ruido. Pero dado el historial del flujo de datos, ya que su curso es conocido a través del diagrama de Trellis, pueden corregirse los errores de bit reconstruyendo los caminos en base a la mayor probabilidad. Éste es preci- 14 - 14 Transmisión de Señales de TV Digital por Satélite, DVB-S samente el principio de funcionamiento del llamado Decodificador Viterbi, nombrado después de su inventor. El decodificador Viterbi es virtualmente la contraparte del decodificador convolucional y no existe, por consiguiente, ningún decodificador convolucional. Además, un decodificador Viterbi es mucho más elaborado que un codificador convolucional. t0 00 01 t1 t2 0/00 0/00 1/11 1/11 t3 0/00 0/10 0/11 1/00 10 11 1/01 Estado del registro tiempo Fig. 14.16. Diagrama de Trellis Después de la codificación convolucional, el Flujo de Datos está ahora inflado por un factor de 2. Por ejemplo, 10 Mb/s ahora se han vuelto 20 Mb/s pero las dos salidas de flujos de datos ahora acarrean 100 % de techo como protección de errores. Por otro lado, esto baja correspondientemente la tasa de datos netos disponible. Este techo, como también la protección de errores, puede controlarse en la Unidad de Picado (Fig. 14.17.), dado que la Tasa de Datos puede rebajarse omitiendo bits selectivamente. La omisión, es decir el picado, se hace de acuerdo con un arreglo llamado el “patrón de picado”, que son acreditados tanto en el transmisor como en el receptor. Esto hace posible variar la Relación de Código entre 1/2 y 7/8. 1/2 significa ningún picado, o sea una protección de errores máxima y 7/8 constituye una protección de errores mínima y, correspondientemente, una tasa de datos neta máxima. En el receptor, los bits “picados” son llenados con bits “No Importa” y son tratados como errores en el decodificador Viterbi y posteriormente reconstruidos. Hasta aquí las etapas de procesamiento en DVB-S y en DVB-T son 100 % idénticas. En el caso de DVB-T, los dos flujos de datos se combinan para formar un flujo de datos común, accediendo alternadamente a los flujos de datos picados superior e inferior. En DVB-S los flujos de datos superior e inferior van directamente al Mapeador dónde los dos flujos de datos son convertidos en la constelación correspondiente de la modulación QPSK. 14 - 15 1/2 2/3 3/4 5/6 7/8 X1 X1 Y1 Y1 X1 X2 X3 X4 X1 Y2 Y3 Y1 Y2 Y3 Y4 Y1 X3 Y4 X1 X2 X3 X1 Y2 Y1 Y2 Y3 Y1 X3 X1 X2 X3 X4 X5 X1 Y2 Y4 Y1 Y2 Y3 Y4 Y5 Y1 X3 Y5 X1 X2 X3 X4 X5 X6 X7 X1 Y2 Y4 Y6 Y1 Y2 Y3 Y4 Y5 Y6 Y7 Y1 Y3 X5 X7 Fig. 14.17. Picado en DVB-S Δf Δf cos 2 cos 2 cos 2 cos 2 r = Δf/BN f Δf 2BN = BS Δf Fig. 14.18. Filtrado digital Roll-off El “mapeado” es seguido por un filtrado digital para que el espectro “caiga” suavemente hacia los canales adyacentes. Esto limita el ancho de banda de la señal y al mismo tiempo optimiza el patrón de ojo de la señal de datos. En DVB-S, el filtrado digital se lleva a cabo con un “factor de caída” r = 0,35. La señal cae con un perfil tipo raíz del coseno cuadrado dentro de la banda de frecuencias. La forma de coseno cuadrado del espectro requerida sólo se produce combinando el filtro de salida del transmisor con el filtro del receptor porque ambos filtros exhiben el perfil de raíz del coseno cuadrado. El factor de caída describe la pendiente del filtro digital y está definido como r = ∆f/fN. Después del filtrado digital, la señal es modulada en QPSK en el 14 - 16 Transmisión de Señales de TV Digital por Satélite, DVB-S modulador IQ, convertida a RF a la frecuencia de subida al satélite y que, después de la amplificación de potencia, alimenta a la antena de la estación satelital. Es luego subida al satélite en la banda de los 14 a 17 GHz. 14.4 Procesamiento de la Señal en el Satélite Los satélites geoestacionarios de radiodifusión directa que se ubican permanentemente sobre el ecuador en una órbita situada a aproximadamente 36.000 Km sobre la superficie de la Tierra reciben la señal DVB-S subiendo de la estación terrena de transmisión hacia el satélite y la limitan primero con un filtro pasabanda. Dada la distancia de la transmisión hacia el satélite de más de 36.000 Km se produce una pérdida de espacio-libre por encima de los 200 dB y, como resultado, la señal útil se atenúa correspondientemente, la antena de transmisión hacia el satélite y la antena receptora en el satélite deben poseer las ganancias adecuadas. En el satélite, la señal DVB-S se convierte a la frecuencia de bajada en la banda de 11 a 13 GHz y luego amplificada por medio de un TWA (Travelling Wave tube Amplifier ‒ Amplificador valvular de desplazamiento de onda). Estos amplificadores son altamente nolineales y, en la práctica, tampoco pueden corregirse debido a la disponibilidad de energía en el satélite. Durante el día, las celdas solares proporcionan la energía al satélite y también se cargan las baterías. Durante la noche, el satélite se alimenta sólo de sus baterías. Antes de que la señal se retransmita a la Tierra, es nuevamente filtrada para suprimir las componentes fuera de banda. La antena transmisora del satélite tiene un cierto patrón para obtener la óptima cobertura en el área de recepción a ser cubierta en la Tierra. Esto produce una “huella” dentro de la cual los programas pueden ser recibidos. Debido a la alta pérdida de espacio libre de aproximadamente 200 dB, debida a la distancia de la bajada de más de 36.000 Km, la antena de transmisión del satélite debe poseer la alta ganancia correspondiente. La potencia de transmisión está en el orden de los 100 w. La unidad de procesamiento de señal del satélite se llama Transpondedor. La subida y bajada al satélite están polarizadas, es decir hay canales polarizados horizontal y verticalmente. La polarización se usa para poder aumentar el número de canales. 14.5 El Receptor DVB-S Después de que la señal DVB-S viniendo del satélite haya viajado otra vez a lo largo de 36.000 Km y, por consiguiente, se haya atenuado correspondientemente en 200 dB y su potencia haya sido reducida aún más por las condiciones atmosféricas como la lluvia o la nevada, llega a la antena receptora del satélite y se enfoca al punto focal del plato. Éste es el punto preciso donde 14 - 17 está montado el bloque de bajo ruido (LNB). El LNB contiene una guía de onda con sondas para cada una de las polarizaciones horizontal y vertical. Dependiendo de qué plano de polarización haya sido seleccionado, la señal de la sonda horizontal o la de la vertical es la que logrará pasar. El plano de polarización es seleccionado por el voltaje de alimentación al LNB (14/18 V). La señal recibida se amplifica después en un amplificador de bajo ruido de arseniuro de galio y es luego convertida a la primera frecuencia intermedia (FI) satelital en la banda de 950 a 2.100 MHz. LNB Plato 1ra FI Sat (950 … 2100 MHz) CC 14/18 V 22 kHz Receptor DVB-S Fig. 14.19. Receptor satelital y LNB Los LNB “universales” modernos (apropiados para recibir TV digital) contienen dos osciladores locales con salidas de 9,75 GHz y 10,6 GHz, la señal recibida es convertida mezclándola con los 9,75 GHz o los 10,6 GHz dependiendo de si el canal recibido está en la banda baja o la alta del satélite. Los canales DVB-S normalmente están en la banda superior y se emplea el oscilador de 10,6 GHz. La frase “apropiado para recibir TV digital” sólo se refiere a la presencia de un oscilador de 10,6 GHz y resulta engañosa. El LNB cambia entre 9,75 y 10,6 GHz por medio de un voltaje de conmutación de 22 KHz superpuesto en la alimentación de energía al LNB. La alimentación al LNB se provee vía el cable coaxial que distribuye la salida de frecuencia intermedia satelital en la banda de los 950 a 2.050 MHz. Por consiguiente, durante el trabajo de instalación, debe tenerse cuidado de apagar el receptor satelital ya que de otra manera un posible corto circuito podría dañar el suministro de voltaje hacia el LNB. En el receptor DVB-S, conocido como set-top-box , “caja” o decodificador DVB-S, la señal sufre una segunda conversión a una segunda FI satelital. Esta conversión se realiza con la ayuda de un mezclador IQ que se alimenta de un oscilador controlado por el circuito de recuperación de la portadora. Después de la conversión IQ, se obtienen nuevamente las señales I y Q análogas. Las señales I y Q luego pasan por un convertidor A/D y son aplicadas 14 - 18 Transmisión de Señales de TV Digital por Satélite, DVB-S al filtro apareado en el que el mismo proceso de filtrado de raíz del coseno cuadrado tiene lugar con un factor de caída de 0,35 como en el lado de la transmisión. Junto con el filtro del transmisor, esto produce el filtrado de la señal DVB-S con una caída de coseno cuadrado real. El proceso de filtrado debe aparearse con respecto al factor de caída tanto al lado del transmisor como del receptor. V H Figura de Ruido del LNB = 0,6 … 1 dB, Ganancia aprox. 50 dB 10,7 … 12,75 GHz H X BP V 950 … 2100 MHz LP 1ra FI Sat. 9,75 GHz 10,6 GHz Fig. 14.20. Unidad exterior – LNB Recuperador de portadora y reloj 1ra FI Sat A FI1 FI2 A 2 D cos D Filtro apareado Des-mapeador Decodificador Viterby MPEG-2 Desintercalador Decodificador Reed Solomon Removedor de energía dispersa Interfaz de Banda base Fig. 14.21. Receptor DVB-S (sin el decodificador MPEG-2) Después del filtro apareado, el circuito de recuperación de reloj y portadora y los des-mapeadores se extraen las señales de entrada. El des-mapeador genera de nuevo un flujo de datos donde los primeros errores son removidos en el decodificador Viterbi. El decodificador Viterbi es la contraparte del 14 - 19 codificador convolucional. El decodificador Viterbi debe tener conocimiento de la Relación de Código en uso. El decodificador debe informarse de esta Relación de Código (1/2 … 3/4 … 7/8) mediante la intervención del operador. El decodificador Viterbi es seguido por el des-intercalador convolutional dónde cualquier error de ráfaga es roto en errores individuales. Los errores de bit todavía presentes se corrigen luego en el decodificador Reed-Solomon. A los paquetes del flujo de transporte, que tenían una longitud original de 188 bytes, se les habían adicionado 16 bytes como protección de errores en el transmisor. Éstos pueden usarse en el lado receptor por corregir hasta 8 errores por paquete que ahora tienen una longitud de 204 bytes. Los errores de ráfaga, es decir los errores múltiples en un paquete, deben de haber sido rotos por el proceso de des-intercalado precedente. Sin embargo, si un paquete del flujo de transporte, protegido contra errores con una longitud de 204 bytes, contiene más de 8 errores la protección de errores fallará. El indicador de error de transporte en el encabezado del flujo de transporte es puesto en “1” para marcar este paquete como errado. La longitud del paquete es ahora de 188 bytes. Los paquetes del Flujo de Transporte marcados como errados no deben ser usados por el decodificador MPEG-2 y deberá aplicarse decodificación y ocultación del error. Después de la decodificación Reed-Solomon la dispersión de energía es removida y la inversión de bytes de la sincronización es cancelada. Durante este proceso la unidad de dispersión de energía se sincroniza con esta sucesión de 8 paquetes de bytes de inversión de la sincronización. A la salida de la siguiente interfaz de banda base está nuevamente disponible el Flujo de Transporte MPEG-2 y se aplica luego al decodificador MPEG-2. Hoy, todo el decodificador DVB-S se localiza en un chip después de los convertidores A/D que, a su vez, normalmente se integran en el sintonizador satelital. Es decir, el sintonizador, que es controlado vía el bus I2C, tiene un conector tipo F a la entrada para la señal del LNB y una salida paralela para el flujo de transporte. 14.6 Influencias que Afectan la Cadena de Transmisión Satelital Esta sección trata de las influencias a ser esperadas en la cadena de transmisión satelital y se verá que estas influencias están principalmente restringidas al ruido. Sin embargo, permítanos primero empezar con el modulador. Puede asumirse como ideal hasta el modulador IQ. El modulador IQ puede presentar diferentes ganancias en las ramas I y Q, tener algún error de fase en el rotador de 90° o una falta de supresión de la portadora. Puede también ser afectado por el ruido y corrimientos de fase en esta sección del circuito. Sin 14 - 20 Transmisión de Señales de TV Digital por Satélite, DVB-S embargo, estos problemas pueden ignorarse debido a la naturaleza robusta de la modulación QPSK; normalmente nunca se alcanzará un orden de magnitud tal que afecte notoriamente a la calidad de la señal. En el satélite, la válvula de onda progresiva (TWT) genera no-linealidades severas, pero prácticamente éstas no afectan. En la región de subida y bajada del satélite, sin embargo, dónde la señal DVB-S se atenúa severamente por más de 200 dB debido a la distancia de 36.000 Km que la señal viaja en cada sentido, se experimentan fuertes efectos causados por el ruido. Estos efectos del ruido son el Ruido Aditivo Blanco Gaussiano (AWGN) sobrepuesto en la señal, la cual será la única influencia a ser discutida. No-linealidad Ruido Errores IQ Mod. DVB-S Ruido blanco gausiano aditivo (AWGN) Rec. DVB-S Fig. 14.22. Influencias que afectan la transmisión por satélite Seguidamente se analizará la bajada satelital mediante un ejemplo con respecto a la atenuación de la señal y los efectos resultantes del ruido. La mínima relación portadora/ruido (C/N) y la tasa de error de bit del canal necesarias son conocidas y se predeterminan de la pre-corrección de error (Reed-Solomon y la codificación convolucional, FEC) (Fig. 14.23.). Para obtener una idea de la relación portadora/ruido (C/N) esperada, permítanos considerar los niveles en la bajada del satélite. Un satélite geoestacionario está “estacionado” en una órbita a 35.800 Km sobre el ecuador. Ésta es la única órbita en que puede viajar síncronamente alrededor de la Tierra. A 45° de latitud, la distancia a la superficie de la Tierra está dada por: d = Radio de Tierra × sen(45°) + 35.800 Km = 6.378 Km × sen(45°) + 35.800 Km = 37.938 Km; 14 - 21 Potencia transmitida (por ejemplo Astra 1F): Potencia del transpondedor supuesta: 82 W = Ganancia de la antena de transmisión PIRE del satélite (potencia radiada isotrópica equivalente) 19 dBW 33 dB 52 dBW Atenuación de espacio libre: Distancia Tierra ‒ Satélite = 37.938 Km Frecuencia de transmisión = 12,1 GHz Constante de pérdida Atenuación de espacio libre 91,6 dB 1,7 dB 92,4 dB 205,7 dB Potencia recibida: PIRE del satélite Atenuación de espacio libre Atenuación en cielo claro Error direccional de recepción Error de polarización Potencia recibida en la antena Ganancia de la antena Potencia recibida 52,0 dBW 205,7 dB 0,3 dB 0,5 dB 0,2 dB −154,7 dBW 37 dB −117,7 dBW Potencia de ruido en el receptor: Constante de Boltzmann Ancho de banda = 33 MHz Temperatura 20°C = 273K + 20K = 293K Figura de ruido del LNB Potencia de ruido −228,6 dBW/K/Hz 74,4 dB 24,7 dB 1,0 dB −128,5 dBW Relación Portadora/Ruido C/N: Potencia recibida C Potencia de ruido N C/N ‒117,7 dBW ‒128,5 dB 10,8 dB Así, una C/N de alrededor de 10 dB puede esperarse en el ejemplo. Valores de la relación C/N entre 9 y12 dB pueden esperarse en la práctica. Las ecuaciones siguientes forman la base para el cálculo de C/N: Atenuación del espacio libre: L[dB] = 92,4 + 20 × log(f/GHz) + 20 × log(d/Km); f = frecuencia de transmisión en GHz; d = distancia Transmisor-receptor en Km; 14 - 22 Transmisión de Señales de TV Digital por Satélite, DVB-S Ganancia de la antena parabólica: G[dB] = 20 + 20 × log(D/m) + 20 × log(f/GHz); D = diámetro de la antena en m; f = frecuencia de transmisión en GHz; Potencia de ruido a la entrada del receptor: N[dBW] = −228,6 + 10 × log(b/Hz) + 10 × log((T/°C +273)) + F; b = anchura de banda en Hz; T = temperatura en °C; F = figura de ruido del receptor en dB. La Fig. 14.23. muestra las relaciones C/N mínimas como una función de la Relación de Código usada. Además, se trazan las tasas de error de bits preViterbi, post-Viterbi (= pre Reed-Solomon) y post Reed-Solomon. Una Relación de Código frecuentemente usada es 3/4. Con una relación C/N mínima de 6,8 dB, resulta una tasa de error pre-Viterbi de 3E-2. La tasa de error de bits post-Viterbi es 2E-4 qué corresponde al límite en que el decodificador Reed-Solomon subsiguiente todavía entrega una tasa de errores de bits de 1E11 o mejor. Esto corresponde aproximadamente a un error por hora y está definido como cuasi libre de error (QEF). Al mismo tiempo, estas condiciones también casi corresponden al “umbral” (o efecto “pared”). Un poco más de ruido y la transmisión se deteriora abruptamente. Del satélite Flujo de Transporte MPEG-2 Sintonizador DVB-S CR 1/2 2/3 3/4 5/6 7/8 C/N >4,1 dB >5,8 dB >6,8 dB >7,8 dB >8,4 dB Decodificador Viterbi BER<3E-2 @ CR = 3/4 Decodificador RS BER<2E-4 Decodificador MPEG-2 BER<1E-11 (QEF) = 1 error/hora Fig. 14.23. Tasa de Error de Bits (BER) y relación C/N mínima necesarios en el receptor En el cálculo de la C/N esperada en el enlace de transmisión por satélite del ejemplo hay, por consiguiente, aún un margen de aproximadamente 3dB 14 - 23 BER disponibles para una Relación de Código de 3/4. La precisa relación entre la tasa de error de bits del canal, es decir la tasa de errores de bits pre-Viterbi, y la relación señal a ruido (S/N) se muestra en la Fig. 14.24. 1E+00 1E-01 1E-02 1E-03 1E-04 1E-05 1E-06 1E-07 1E-08 1E-09 1E-10 1E-11 1E-12 1E-13 0 5 10 15 20 C/N [dB] Fig. 14.24. Tasa de Error de Bits (BER) como una función de C/N en DVB-S 14.7 DBV-S2 DVB-S fue adoptado en 1994, usando QPSK como método de modulación y un sistema de protección concatenado de error Reed-Solomon FEC y de codificación convolucional. En 1997 fue formulado el estándar DVB DSNG [ETS301210], el que fue creado para propósitos informativos (DSNG = Digital Satellite News Gathering). Las señales en vivo se transmiten por el satélite, desde furgonetas de difusión de exteriores, durante grandes acontecimientos públicos, a los estudios. DVB DSNG utiliza ya sea 8PSK ó 16QAM. En 2003 fueron definidos nuevos métodos, para difusión directa y para usos profesionales, como “DVB-S2” (Fig. 14.25.) en el documento ETSI [ETS302307]. 14 - 24 Transmisión de Señales de TV Digital por Satélite, DVB-S TS MPEG-2 Entrada de Flujos múltiples o simples (TS MPEG-2 o genérico) Interfaz de entrada Señalización de la capa física, inserción de piloto, cifrado FEC DVB-S opcional Adaptación de modo Adaptación de flujo Codificación CRC-8, señalización de banda base Padding, Cifrado de banda base Encuadre de capa física Filtro digital Roll-off 0.2, 0.25, 0.35 BCH, LDPC, Intercalado de bits Codificador FEC QPSK 8PSK 16APSK 32APSK Mod. jerárquica Mapeador Relación de código Modulador IQ Conversión, amplificación, antena Fig. 14.25. Diagrama de bloques de un modulador DVB-S2 QPSK, 8PSK (uniforme y no uniforme) y 16APSK (desplazamiento de fase de 16 amplitudes) fueron proveídos como métodos de modulación, este último fue utilizado solamente en el campo profesional (DSNG). La protección de error usada es totalmente nueva, denominada LDPC (chequeo de paridad de baja densidad). El estándar es absolutamente abierto para radiodifusión, servicios interactivos y DSNG. Pueden también ser transmitidos flujos de datos no conformes con los flujos MPEG-2 y es posible transmitir uno o varios flujos de transporte. Esto también se aplica a los flujos de datos genéricos que también se pueden dividir en paquetes. La Fig. 14.25. muestra el diagrama de bloque de un modulador DVB-S2. En la interfaz de entrada, el flujo o los flujos de datos aparecen bajo la forma de un flujo de transporte MPEG-2 o de flujos de datos genéricos. Después de los bloques de modo y de adaptación del flujo, los datos alimentan al bloque de la codificación FEC. Q 10 00 I 11 01 Relación de código: 1/4, 1/3, 2/5, 1/2, 3/5, 2/3, 3/4, 4/5, 5/6, 8/9, 9/10 Fig. 14.26. QPSK código Gray, mapeo absoluto (como en DVB-S) 14 - 25 Q 100 110 000 010 001 011 Relación de código: 3/5, 2/3, 3/4, 5/6, 8/9, 9/10 I 101 111 Fig. 14.27. 8PSK Código Gray Son mapeados en el mapeador que sigue, QPSK (Fig. 14.26.), 8PSK (Fig. 14.27.), 16APSK (Fig. 14.28.) ó 32APSK (Fig. 14.29.). Éste es siempre el mapeado absoluto, es decir, no-diferencial. La modulación jerárquica es un caso especial. Es virtualmente retro-compatible con el estándar DVB-S, permitiendo transmitir un flujo DVB-S y un flujo adicional DVB-S2. En el modo jerárquico de modulación (Fig. 14.30.), la constelación se puede interpretar de dos diversas maneras. El cuadrante se puede interpretar como un punto de la constelación, ganando 2 bits para la trayectoria prioritaria conforme a DVB-S. Es también posible, sin embargo, buscar los dos puntos discretos en el cuadrante, decodificando otro bit para la trayectoria de baja prioridad en el proceso. En este caso, se transmiten 3 bits por símbolo. En DVB-T también existe la modulación jerárquica. Después del mapeo la señal pasa por el encuadre en la capa física y las etapas de filtrado digital roll-off y después convertidos en la señal de modulación apropiada para el modulador IQ. El factor de roll-off es 0,20, 0,25 o 0,35. Q 1010 1000 0010 0110 0000 1110 1100 0100 I 0111 1111 1101 1011 1001 0011 0101 0001 Fig. 14.28. 16APSK Relación de código: 2/3, 3/4, 4/5 5/6, 8/9, 9/10 14 - 26 Transmisión de Señales de TV Digital por Satélite, DVB-S Q 01101 11101 01001 01100 11001 00101 00001 00100 11100 00000 10001 10101 10100 01000 10000 11000 11110 10110 01110 10111 10011 00111 00011 00110 10010 I Relación de código: 3/4, 4/5, 5/6, 8/9, 9/10 11010 00010 01010 11111 01111 11011 01011 Fig. 14.29. 32APSK La protección de error (Fig. 14.31.) consiste en un codificador BCH (Bose-Chaudhuri-Hocquenghem) y un codificador LDPC (chequeo de paridad de baja densidad) seguidos por el intercalador (interleaver) de bits. Las tasas de código posibles van de 1/4 a 9/10 y se muestran en las figuras de los respectivos diagramas de constelación (QPSK … 32APSK). Comparado con DVB-S, la relación mínima de C/N necesaria en DVB-S2 es mucho más dependiente del método de modulación y se puede variar también por la tasa de código. Cuadrante 10 1 Bit baja prioridad Q Cuadrante 00 1 0 0 I 0 Cuadrante 11 0 1 1 Bit alta prioridad Cuadrante 01 Fig. 14.30. Modulación jerárquica QPSK