3. Control vía arquitectura abierta.
Supongamos las siguientes condiciones:
r(t):
y(t):
d(t):
u(t):
f( ):
Señal de referencia
Salida de la planta
Perturbación aditiva
Entrada de control
Función de transformación
Con inversión
La ecuación que modela el proceso es:
y(t) = f(u) + d(t)
Se desea
y(t) = r(t)
Luego
r(t) = f(u) + d(t)
La ley de control es:
u(t) = f-1(r(t) – d(t))
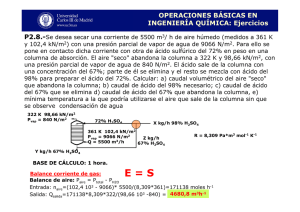
La idea se ilustra en la siguiente figura:
d(t)
-
r(t)
-1
f ()
u(t)
+
f()
+
y(t)
+
Para que este esquema funcione se deben cumplir los siguientes
requerimientos:
R1:
R2:
R3:
R4:
R5:
f( ) debe describir exactamente la planta.
La transformación f( ) debe ser estable.
Debe existir la inversa f -1( )
La perturbación debe ser medible.
La acción de control debe ser realizable.
Sin inversión
Supongamos el siguiente controlador conceptual:
r(t)
h()
+
u(t)
Planta
y(t)
z(t)
f()
De la figura tenemos:
u(t) = h [ r(t) – z(t)]
= h[ r(t) – f (u(t))]
Así
h -1(u(t)) = r(t) – f (u(t))
Luego
f (u(t)) = r(t) – h -1(u(t))
u(t) = f-1[r(t) – h-1(u(t))]
Se desea que:
Se puede obtener si:
u(t) = f -1(r(t))
r(t) – h-1(u(t)) ≈ r(t)
Esto se obtiene si h-1( ) es muy pequeña, es decir, si h( ) es una
transformación de alta ganancia.
4. Control vía arquitectura cerrada.
Suponiendo que el modelo de la planta es exacto, en la arquitectura
abierta tenemos:
r(t)
h()
+
u(t)
Planta
y(t)
z(t)
Modelo
Haciendo movimientos de bloque obtenemos la arquitectura cerrada:
r(t)
e(t)
+
h()
u(t)
Planta
y(t)
-
Para que este esquema funcione el medidor debe ser realizable,
exacto, estable, inmune al ruido, lineal y no perturbador.
Ganancia muy grande puede hacer el sistema inestable ya que
pequeños errores produce grandes actuaciones.
 0
0