Líneas de influencia
Anuncio

Líneas de influencia
J. T. Celigüeta
Línea de influencia - Definición
Q
Q
Q
Q
Q
La función (gráfica o analítica) que define la variación de un
esfuerzo para las distintas posiciones de una carga móvil.
Cargas móviles: puentes, vigas carril, etc.
Movimiento cuasi estático: sin fuerzas de inercia
Objetivo: hallar la posición pésima de las fuerzas y el valor
máximo del esfuerzo
Ejemplo:
LI(RA)
z
A
1
F
B
RA = F
L −z
L
Línea de influencia - Suposiciones
Q
Q
Q
Q
2
Material elástico lineal, pequeñas deformaciones
Movimiento cuasi-estático: sin fuerzas de inercia.
Una sola fuerza móvil, de módulo unidad, con dirección y sentido
constante, que se mueve paralelamente a sí misma. (*)
Trayectoria recta (*)
X (*) no es necesario, se supone así para facilitar el cálculo
Línea de influencia – Métodos de cálculo
Q
Q
Q
3
Vigas isostáticas
X Empleo de las ecuaciones de la estática
X Principio de los trabajos virtuales (no)
Celosías isostáticas
X Ecuaciones de la estática
Estructuras hiperestáticas
X Principio de Müller-Breslau
LI de vigas isostáticas
Las ecuaciones de la estática permiten hallar cualquier esfuerzo
z
1
B
A
2m
10 m
RA =
12 − z
10
RB = 1 − RA =
4
z −2
10
LI de vigas isostáticas
Cortante en C
Carga a la izda de C: aíslo tramo dcha.
QC ≡ RB =
z −2
10
0<z <7
Carga a la dcha de C: aíslo tramo izda.
QC ≡ −RA =
5
z − 12
10
7 < z < 12
LI de vigas isostáticas
Flector en C
Carga a la izquierda de C: aíslo tramo de la derecha.
MC ≡ RB 5 =
z −2
2
0<z <7
Carga a la derecha de C: aíslo tramo de la izquierda.
MC ≡ RA 5 =
6
12 − z
2
7 < z < 12
LI en celosías isostáticas
Se determinan para la carga aplicada sólo en los nudos
Cuando la carga está entre dos nudos, la LI es una recta
B
C
D
F
E
L
A
G
H
z
1
J
L
K
M
6L
Reacciones
RA
RG
1
1
A
7
5/6
5/6
H
4/6
J
3/6
K
1/6
2/6
L
1/6
M
G
A
H
2/6
J
4/6
3/6
K
L
M
G
LI en celosías isostáticas. Barras AB y AH
RA
1
A
5/6
H
4/6
J
3/6
L
K
1/6
2/6
M
G
NAB
A
H
J
K
L
M
G
Equilibrio vertical de A
N AB = − 2RA
Es nulo cuando la
carga está en A
5√2/6
Equilibrio horizontal de A
NAH
N AH = −N AB / 2 = RA
5√2/6
8
A
H
Es nulo cuando la
carga está en A
J
K
L
M
G
LI en celosías isostáticas. Montante BH
1
NBH
Solo trabaja cuando la
carga pasa por H
A
9
H
J
K
L
M
G
LI en celosías isostáticas. Diagonal CK
B
H
A
C
D
G
K
-√2RG
Carga entre A y J:
aíslo parte derecha
equilibrio vertical
10
M
√2RA
J
K
NCK = − 2RG
L
3√2/6
NCK
H
F
J
1
A
E
L
M
2√2/6
Carga entre K y G:
aíslo parte izquierda
equilibrio vertical
NCK = 2RA
G
LI en celosías isostáticas. Montante CJ
C
B
H
A
D
E
F
G
J
K
1
L
M
NCJ
2/6
K
A
H
L
M
J
3/6
11
Carga entre A y J:
aíslo parte derecha
Carga entre K y G:
aíslo parte izquierda
NCJ = RG
NCJ = −RA
G
LI en celosías isostáticas. Cordón inferior JK
C
B
H
A
D
G
K
H
Carga entre A y J:
aíslo parte derecha
Momento respecto de C
12
L
M
L
M
8/6
NJK
N JK = 4RG
F
J
1
A
E
J
K
G
Carga entre K y G:
aíslo parte izquierda
momento respecto de C
N JK = 2RA
LI para trenes de cargas
Q
Q
Q
Q
Conjunto de N cargas puntuales, separadas unas distancias fijas entre
sí di, y que se mueven en grupo.
Se halla la LI para una carga unitaria LI(z)
El tren de cargas se sitúa en la viga mediante su primera carga (z)
Las restantes cargas están situadas a zi=z- di i=1,N
E (z ) =
∑ P LI (z ) = ∑ P LI (z − d )
i
i =1,N
i
i
i =1,N
d2
d3
3
z3
z2
z
13
2
1
Se suma el efecto de cada carga,
considerando su posición respecto
a la primera fuerza.
Ubicar las fuerzas en la LI de tal
manera que se maximice el efecto
i
LI para cargas distribuidas
Q
Q
Q
Carga distribuida de amplitud q(x) y longitud d.
Se halla la LI para una carga unitaria LI(z)
La carga se sitúa en la viga mediante su extremo izquierdo
Se integra el efecto de la carga
distribuida considerando su
posición.
d
E (z ) = ∫ q(x ) LI (z + x )dx
0
x
14
d
Ubicar la carga en la LI de tal
manera que se maximice la integral
Ejemplo: 2 cargas móviles
RA max = 5000RA (0) + 4000RA (1)
RA max = 5000
12 − 0
12 − 1
+ 4000
= 10400
10
10
)
RB(+max
= 5000RB (12) + 4000RB (11) = 8600
)
RB(−max
= 5000RB (0) + 4000RB (1) = −1400
15
Ejemplo: 2 cargas móviles
QC max = 5000QC (7) + 4000QC (6) = 4100
)
MC(+max
= 5000MC (7) + 4000MC (6) = 20500
16
)
MC(−max
= 5000MC (0) + 4000MC (1) = −7000
Principio de Müller-Breslau (1886)
Q
Q
LI de una reacción RB en una estructura hiperestática (h)
Carga unitaria móvil (I: punto de la trayectoria)
1
z
I
B
Q
17
RB
Método de flexibilidad X=RB
Principio de Müller-Breslau
Q
Caso I (h-1) Eliminar RB. Sometido a la carga móvil en I
z
1
Deformación en la
dirección de la reacción:
B
Q
18
ΔIB
B
Caso B (h-1) Aplicar una fuerza unidad en la dirección de RB
Deformación en la
dirección de la reacción:
ΔBB
Deformación en la
dirección de la carga:
ΔBI
Principio de Müller-Breslau
Q
Condición de compatibilidad
ΔB = 0
Q
ΔBI + RB ΔBB = 0
Reciprocidad de deformaciones (Maxwell)
ΔBI
RB = − B
ΔB
19
−ΔIB
RB =
ΔBB
ΔIB = ΔBI
Principio de Müller-Breslau
ΔBI
RB = − B
ΔB
Q
20
La LI de RB buscada es el cociente (con signo menos) de:
X La deformación en la dirección de la carga (punto I) en el caso B
X La deformación en la dirección de la reacción en el caso B
Principio de Müller-Breslau
Q
Q
Q
Q
Sólo hay que resolver el caso B (h-1) y hallar dos deformaciones.
La carga móvil desaparece y se sustituye por un valor unidad del
esfuerzo cuya LI se busca.
El aspecto de la LI queda definido por la deformación en la
trayectoria (punto l) situada en el numerador (identificar máximos)
X LI es la deformada de una viga sin carga: cúbica
Interesante si se dispone de un método que calcule fácilmente
deformaciones, sin importar el grado h: método de rigidez.
z
z
1
Cúbica
B
I
B
21
RB
Δ (z )
RB = −
ΔBB
B
B
B
1
B
I
Müller-Breslau para momentos flectores (1)
Q
Caso I (h-1) Eliminar MB. Sometido a la carga móvil en I
1
Bd
Bi
B
Q
Giros a ambos lados:
Caso B (h-1) Aplicar un momento unidad en la dirección de MB
B
B
Bi
Bd
B
1
I
1
MB=1
22
I
I
θBi
θBd
Giros a ambos lados:
Deformación en la
dirección de la carga:
B
θBiB θBd
ΔBI
Müller-Breslau para momentos flectores (2)
Condición de compatibilidad
Q
I
I
B
θBi
+ M B θBiB = −θBd
− M B θBd
Q
Reciprocidad generalizado
−ΔBI
MB = B
B
θBi + θBd
Expresión similar a la reacción.
Suma de los giros en ambos lados, en
la dirección del momento unitario
aplicado
23
θBi = −θBd
I
−(θBiI + θBd
)
MB = B
B
θBi + θBd
I
I
θBi
+ θBd
= ΔIB
Müller-Breslau para cortantes y axiales
−ΔBI
QB = B
ΔBi + ΔBBd
−ΔBI
NB = B
B
ΔBi + ΔBd
24
Rigidez de un tramo de viga apoyada
EI
L
25
⎡4 2⎤ ⎪⎧θI ⎪⎫ ⎪⎧M I ⎪⎫
⎪=⎪ ⎪
⎢
⎥⎪
⎨
⎨ ⎬
⎢2 4⎥ ⎪θ ⎬
⎪
⎪M J ⎪
⎢⎣
⎥⎦ ⎪
⎩ J⎪
⎭ ⎪
⎩ ⎪
⎭
Deformada de una viga sin cargas
Deformación lateral v de una viga sin cargas, apoyada en sus
extremos, en función de los giros extremos
2
3
3
2
v = (ξ − 2ξ + ξ )LθI + (ξ − ξ )LθJ
x
ξ=
L
Deformación lateral v de una viga sin cargas, en función de las
deformaciones y giros extremos
v = (1 − 3ξ 2 + 2ξ 3 )δIY + (ξ − 2ξ 2 + ξ 3 )LθI + (3ξ 2 − 2ξ 3 )δJY + (ξ 3 − ξ 2 )LθJ
26
Ejemplo. LI de la reacción en B
z
1
B
A
Caso B (isostático)
M = L − x = EIv ′′
Lz 2
z3
Δ = v(x → z ) =
−
2EI 6EI
B
I
L3
Δ = v(x = L) =
3EI
B
B
27
L
M = 1(L − x )
Lx 2
x3
v=
−
2EI 6EI
ΔBI
3z 2
z3
RB = − B = − 2 + 3
ΔB
2L
2L
Viga apoyada empotrada. Momento en B
Caso B: MB=1
ΔBI
MB = − B
θB
A
I
B
EI
L
Por rigidez: dos grados de libertad
θA =
28
−L
6EI
θB =
⎡ 4 2⎤ ⎧⎪θA ⎫⎪ ⎧⎪0⎫⎪
⎢
⎥ ⎨⎪ ⎬⎪ = ⎨⎪ ⎬⎪
⎢2 4⎥ ⎪θ ⎪ ⎪1⎪
⎢⎣
⎥⎦ ⎪⎩ B ⎪⎭ ⎪⎩ ⎪⎭
L
3EI
Viga apoyada empotrada. Momento en B
v = (ξ − 2ξ 2 + ξ 3 )LθI + (ξ 3 − ξ 2 )LθJ
−L
θI ≡ θA =
6EI
(ξ = x / L)
L2
v=
(ξ 3 − ξ )
6EI
L
θJ ≡ θB =
3EI
ΔBI
(−v )
v
v 3EI
MB = −
=−
=
=
L
θB
θB
L
3EI
1
B
MB =
L 3
(ξ − ξ )
2
-0.192 L
M max = −0.192L
29
x = L/ 3
0.577 L
Viga de 2 vanos. Momento en el apoyo B
z
1
A
Caso B: MB=1
C
B
L
L
Dos vigas independientes (isos.)
M = x / L = EIv ′′
0<x <L
x3
EIv =
+ Ax + B
6L
v(x = 0) = 0
→
B=0
v(x = L) = 0
→
A = −L / 6
x3
Lx
v=
−
6EIL 6EI
30
0<x <L
Viga de 2 vanos. Momento en el apoyo B
z3
Lz
Δ = −v(x → z ) = −
+
6EIL 6EI
B
I
ΔBI
MB = − B
B
θBi + θBd
31
θBiB = v ′(x = L) =
L
3EI
z3
Lz
−
+
z3
z
6
6
EIL
EI
=−
= 2−
L
L
4L
4
+
3EI
3EI
B
θBd
= θBiB =
0<z <L
L
3EI
Viga de 2 vanos. Momento en el centro del vano
Caso P: MP=1
MP =
32
−ΔI
θPi + (−θPd )
Situación pésima: carga en
el propio punto P
Viga de 2 vanos. Momento en el centro del vano
Caso P: MP=1 Ecuación de equilibrio por rigidez
⎡4
−6
⎢
l2
⎢l
⎢
12 12
⎢
+ 3
3
⎢
l
l
⎢
⎢
⎢
⎢
EI ⎢
⎢
simétrica
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
2
l
−6
l2
4
l
0
0
6
l2
6
l2
0
0
4
l
2
l
4 4
+
l
L
⎤
0⎥
⎥
⎥⎧θ ⎫
⎧ 0⎫
0 ⎥⎥ ⎪⎪⎪ A ⎪⎪⎪ ⎪⎪ ⎪⎪
⎪ ⎪
⎥ ⎪⎪ΔP ⎪⎪ ⎪⎪ 0⎪⎪
⎥⎪ ⎪ ⎪ ⎪
0 ⎥ ⎪⎪ θ ⎪⎪ ⎪⎪ 1⎪⎪
⎥ ⎪⎪ Pi ⎪⎪ ⎪⎪ ⎪⎪
⎥ ⎪⎨ ⎪⎬ = ⎪⎨−1⎬⎪
θ
0 ⎥⎥ ⎪⎪ Pd ⎪⎪ ⎪⎪ ⎪⎪
⎥ ⎪⎪ θB ⎪⎪ ⎪⎪ 0⎪⎪
2 ⎥ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪
⎥ ⎪⎪ θ ⎪⎪ ⎪⎪ 0⎪⎪
L ⎥ ⎪⎩ C ⎪⎭ ⎪⎩ ⎪⎭
⎥
4⎥
⎥
L⎦
l = L /2
Solución numérica
33
Viga de 2 vanos. Momento en el centro del vano
−ΔI
v
=
MP =
θPi + (−θPd ) θPi − θPd
M P max
34
vP
=
= 0.203L
θPi − θPd
Viga de 4 vanos. Momento en el 2º apoyo
Caso B: MB=1
Atención
Cálculo de la deformada ΔI y de los giros θB del caso B por rigidez
Rigidez de una viga
EI
L
35
⎡4 2⎤ ⎪⎧θI ⎪⎫ ⎪⎧M I ⎪⎫
⎪ ⎪
⎢
⎥⎪ ⎪
⎬=⎨ ⎬
⎢2 4⎥ ⎨
⎥⎦ ⎪
⎪θJ ⎪
⎪ ⎪
⎪M J ⎪
⎪
⎣⎢
⎩
⎭
⎩
⎭
Viga de 4 vanos. Momento en el 2º apoyo
I
A
Bi
⎡4
⎢
⎢2
⎢
⎢0
EI ⎢
⎢
L ⎢0
⎢
⎢0
⎢
⎢0
⎢⎣
36
C
Bd
2 0 0 0 0⎤ ⎧⎪ θA ⎫⎪ ⎧⎪
0⎫
⎪
⎪
⎥ ⎪⎪ ⎪⎪ ⎪⎪
⎪
4 0 0 0 0⎥⎥ ⎪⎪ θBi ⎪⎪ ⎪⎪ M Bi = 1⎪⎪
⎪⎪ ⎪⎪ ⎪
⎪⎪
⎪
⎥
0 4 2 0 0⎥ ⎪⎪θBd ⎪⎪ ⎪⎪M Bd = −1⎪
⎪⎪⎬
⎥ ⎪⎨ ⎪⎬ = ⎪⎨
0 2 8 2 0⎥ ⎪⎪ θC ⎪⎪ ⎪⎪
0⎪
⎪
⎥⎪ ⎪ ⎪
⎪
⎪
⎪
⎪
⎥
0 0 2 8 2 ⎪ θD ⎪ ⎪
0⎪
⎪
⎥ ⎪⎪ ⎪⎪ ⎪⎪
⎪
⎪
⎥
⎪
⎪
⎪
0⎪
0 0 0 2 4⎥ ⎪ θE ⎪ ⎪
⎪⎭
⎪
⎦ ⎩⎪ ⎭⎪ ⎩⎪
D
E
Viga de 4 vanos. Momento en el 2º apoyo
⎧
θA ⎫
⎪⎧⎪ −1/ 6⎪⎫⎪
⎪
⎪
⎪
⎪
⎪⎪
⎪⎪
⎪
⎪
⎪
⎪
1/
3
θ
⎪⎪
⎪⎪
⎪
Bi ⎪
⎪
⎪
⎪⎪
⎪⎪
⎪
⎪
⎪
θBd ⎪
−
13
/
45
⎪
⎪⎪
⎪
⎪
L ⎪
⎪
⎪
⎨ ⎬=
⎨
⎬
⎪
⎪
⎪
⎪
θ
7
/
90
EI
C ⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
θ
⎪
⎪
⎪
⎪
−
1/
45
D
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
θ
1/ 90⎪
⎪
⎪
⎪
E ⎪
⎪
⎪
⎪
⎪⎭
⎩ ⎭
⎩
Solución del caso B:
ΔBI
MB = − B
B
θBi + (−θBd
)
ΔBI = −v
B
Bi
B
Bd
θ −θ
MB = v
L
13L
28L
=
+
=
3EI
45EI
45EI
45EI
28L
Hay que hallar la deformada v de cada tramo, en función de los giros
37
Viga de 4 vanos. Momento en el 2º apoyo
v = (ξ − 2ξ 2 + ξ 3 )LθI + (ξ 3 − ξ 2 )LθJ
Vano AB
M
(AB )
B
Vano BC
M
38
(BC )
B
θI ≡ θA = −L / 6EI
(ξ = x / L)
θJ ≡ θBi = L / 3EI
v (AB ) 45EI
15L
15L 3
15L 3
=
=
(−ξ + 2ξ 2 − ξ 3 ) +
(ξ − ξ 2 ) =
(ξ − ξ )
28L
56
28
56
θI ≡ θBd = −13L / 45EI
θJ ≡ θC = 7L / 90EI
v (BC ) 45EI
13L
19L 3 45L 2
ξ−
ξ +
ξ
=
=−
28L
28
56
56
0<ξ <1
0<ξ <1
Viga de 4 vanos. Momento en el 2º apoyo
Vano CD
θI ≡ θC = 7L / 90EI
M
Vano DE
(CD )
B
39
v (CD ) 45EI
L
5L 3 3L 2
ξ −
ξ
=
= ξ+
28L
8
56
14
θI ≡ θD = −L / 45EI
M
θJ ≡ θD = −L / 45EI
(DE )
B
0<ξ <1
θ2 ≡ θE = L / 90EI
v (DE ) 45EI
2L
L
3L 2
=
= − ξ − ξ3 +
ξ
28L
56
56
56
Viga de 4 vanos. Momento en el 2º apoyo
B
0.38L
0.577 L
B
-0.08 L
-0.103 L
M B(BC ) = −
M B(AB ) =
15L 3
(ξ − ξ )
56
M B(DE ) = −
M B(CD ) =
40
13L
19L 3 45L 2
ξ−
ξ +
ξ
28
56
56
L
5L 3 3L 2
ξ+
ξ −
ξ
8
56
14
2L
L
3L 2
ξ − ξ3 +
ξ
56
56
56
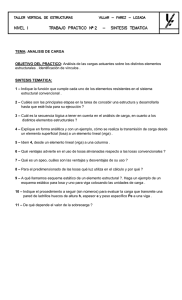
Vigas continuas. Momento en el 2º apoyo
Posición pésima de la carga
móvil siempre el mismo punto
(0.577L).
Aumenta muy poco con el
número de vanos
41
Vanos
MB
2
-0.096 L
3
-0.1026 L
4
-0.10304 L
5
-0.10307 L
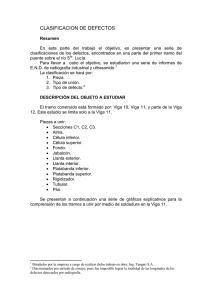
Vigas continuas. Momento en el centro del vano 1
LI(MP)
MP
Posición pésima de la
carga móvil siempre el
propio punto central del
vano.
Disminuye muy poco
con el número de vanos.
Es mayor que el
momento en el 2º apoyo
1
0.203 L
MP
1
0.200 L
MP
1
0.19977 L
42
Vanos
MP
2
0.20312 L
3
0.2000 L
4
0.19977 L
5
0.19976 L
Vigas de 2 y 3 vanos
MB
1
MB
0.577 L
B
1
0.577 L
B
-0.1026 L
-0.080 L
-0.096 L
MP
MP
1
0.200 L
P
0.203 L
0.5 L
P
1
0.5 L
MQ
1
0.175 L
Q
0.5 L
43
Viga de 4 vanos. Momento en los apoyos
MB
1
0.577 L
-0.1030 L
B
0.38L
-0.08 L
MC
1
0.616 L
-0.0858 L
44
C
-0.0858 L
Viga de 4 vanos. Momento en los vanos
MP
1
0.19977 L
P
MQ
1
0.173 L
Q
45
Viga de 5 vanos. Momento en los apoyos
46
Viga de 5 vanos. Momento en los vanos
MP
1
0.19976 L
P
0.5 L
MQ
1
0.173 L
0.5 L
Q
MR
1
0.171 L
0.5 L
47
R
Viga empotrada de 2 vanos. Momento en B
Caso B: MB=1
ΔBI
MB = − B
B
θBi + θBd
Dos vigas independientes iguales
Por rigidez: un grado de libertad
⎡ 4EI ⎤ B
⎢
⎥ {θBi } = {1}
⎢⎣ L ⎥⎦
θBiB =
48
L
4EI
B
θBd
=
L
4EI
Viga empotrada de 2 vanos. Momento en B
v = (ξ − 2ξ 2 + ξ 3 )LθI + (ξ 3 − ξ 2 )LθJ
MB = −
Vano AB
θI = 0
M BAB =
Vano BC
M BBC =
49
(−v )
v
v 2EI
=
=
B
L
L
θBiB + θBd
L
+
4EI 4EI
θJ ≡ θBiB = L / 4EI
v 2EI
L
= (ξ 3 − ξ 2 )
L
2
B
θI ≡ θBd
= L / 4EI
(ξ = x / L)
0 < ξ <1
θJ = 0
v 2EI
L
= (ξ − 2ξ 2 + ξ 3 )
L
2
0<ξ <L
Viga empotrada de 2 vanos. Momento en B
Vano AB
Vano BC
50
M BAB =
M BBC =
v 2EI
L
= (ξ 3 − ξ 2 )
L
2
v 2EI
L
= (ξ − 2ξ 2 + ξ 3 )
L
2
0 < ξ <1
0<ξ <L
Viga empotrada de 2 vanos. Momento en A
Caso A: MA=1
ΔAI
MA = −
(−θAA )
Por rigidez: dos grados de libertad
EI
L
51
⎡4
2 ⎤ ⎧⎪θA ⎫⎪ ⎧⎪−1⎫⎪
⎢
⎥ ⎪⎨ ⎪⎬ = ⎪⎨ ⎪⎬
⎢2 4 + 4⎥ ⎪θ ⎪ ⎪ 0 ⎪
⎢⎣
⎥⎦ ⎪⎩ B ⎪⎭ ⎩⎪ ⎭⎪
θA =
−4L
14EI
θB =
L
14EI
Viga empotrada de 2 vanos. Momento en A
v = (ξ − 2ξ 2 + ξ 3 )LθI + (ξ 3 − ξ 2 )LθJ
ΔAI
(−v )
v14EI
MA = −
=
−
=
⎛ ⎛ −4L ⎞⎞⎟
4L
(−θAA )
⎜⎜− ⎜
⎟⎟⎟
⎜⎝ ⎜⎝14EI ⎠⎠⎟
Vano AB
θI = θA =
M AAB =
Vano BC
M ABC =
52
−4L
14EI
θJ = θB =
L
(−3ξ 3 + 7ξ 2 − 4ξ )
4
θI = θB =
L
14EI
L
(ξ − 2ξ 2 + ξ 3 )
4
θJ = 0
L
14EI
(ξ = x / L)
Viga empotrada de 2 vanos. Momento en A
M AABmax = −0.1684L
53
x max = 0.37716 L
Viga empotrada de 2 vanos. Momento en P
Solución numérica (cespla)
P
I
Pi
54
1 1
Pd
ΔP
MP = −
θPi + θPd
Viga empotrada de 2 vanos. Resumen
MP
0.140 L
P
0.5 L
55
1
Ejemplo
-35 cmTn/Tn
A
Cargas caso A
MA = −
56
ΔI
θA
Ejemplo
MB = −
Cargas caso B
i
57
d
ΔI
θBi + θBd
Ejemplo
MC = −
Cargas caso C
i
58
d
ΔI
θCi + θCd
LI de deformaciones
Q
Q
Q
Q
Aplicación directa del principio de reciprocidad de deformaciones
La carga móvil desaparece y se sustituye por un valor unidad en la
dirección de la deformación cuya LI se busca.
El aspecto de la LI definido por la deformación en la trayectoria
(punto l): identificar máximos.
Cálculo de deformaciones.
θB = ΔIB (z )
Caso I
59
Caso B
Müller-Breslau para celosías isostáticas
Q
Q
Q
Q
Q
Si se elimina el esfuerzo cuya LI se pretende hallar, la estructura
se transforma en un mecanismo: no se puede seguir el método
de flexibilidad como se ha expuesto.
Aplicaremos el Principio del Trabajo Virtual
X Así lo enunció Müller-Breslau
Se elimina el esfuerzo (reacción, interior) cuya LI se busca.
El mecanismo obtenido puede tener movimientos de sólido
rígido, sin acumular energía elástica.
El PTV indica que el trabajo virtual efectuado por las fuerzas
aplicadas es nulo:
δW = δU = 0
60
Müller-Breslau para celosías isostáticas
Q
Q
Fuerzas que actúan
X Fuerza móvil unitaria (1)
X Esfuerzo buscado E
X Reacciones: no producen Trabajo Virtual
Desplazamiento virtual aplicado
X
Dirección de la fuerza móvil δΙ
X
Dirección del esfuerzo δE
δW = E ⋅ δE + 1 ⋅ δI = 0
61
Müller-Breslau para celosías isostáticas
El esfuerzo vale:
δI
E =−
δE
Tomando un desplazamiento virtual unidad δE=1 en la dirección del
esfuerzo
E = −δI con δE = +1
El esfuerzo buscado es:
- la deformación virtual en la dirección de la carga móvil (cambiada de
signo),
- cuando en la dirección del esfuerzo se aplica una deformación virtual
unidad.
Cómo se hace en la práctica?
62
Müller-Breslau para celosías isostáticas
Aplicar una deformación virtual unidad en la dirección del esfuerzo:
Se introduce en la barra un error en longitud λ, de valor +1
La deformada que se obtiene de la estructura es la línea de influencia,
cambiada de signo)
E = −δI
con
δE = +1
En la estructura no aparecen esfuerzos (es isostática sin fuerzas), sólo
deformaciones
Truco práctico: se hace la barra más corta (λ=-1) y la
deformada es directamente la LI buscada
E = δI
63
con
δE = −1
Müller-Breslau para celosías isostáticas
Se introduce en la barra un error en longitud λ, de valor -1
La deformada que se obtiene de la estructura es la línea de influencia.
La deformada se calcula por el método de rigidez.
Comprobar que salen N=0
64
Ejemplo
LI del esfuerzo en la diagonal CK (cespla)
65
Ejemplo
LI del esfuerzo en la barra AB (cespla)
66
Ejemplo. Celosía compuesta
67