Diseño e implementación de un sistema de control PID para un
Anuncio

Universidad Nacional de Itapúa
Facultad De Ciencias Y Tecnología
Licenciatura en Electrónica
Proyecto Final de Grado
Diseño e implementación de un sistema de
control PID para un circuito RLC
Alumnos:
Víctor Del Rosario Florentín
Tutor:
César Milciades Vera
Ing. Víctor Miguel Lafeld
Encarnación - Itapúa - Paraguay
Octubre 2013
ii AGRADECIMIENTOS
Víctor
Agradezco en primer lugar a Dios porque ha estado conmigo a cada paso que doy, cuidándome
y dándome fortaleza para continuar.
A mis padres y hermanos quienes a lo largo de toda mi vida han apoyado y motivado mi
formación académica, creyeron en mí en todo momento y no dudaron de mis habilidades.
A nuestro director de tesis, Ing. Víctor Lafeld por su apoyo y confianza para la realización de
este proyecto.
A mis profesores a quienes les debo gran parte de mis conocimientos, gracias por su paciencia y
enseñanza.
A mis compañeros de clase que de varias maneras siempre estuvieron acompañándome y
ayudándome en los momentos que requería ayuda.
Finalmente un eterno agradecimiento a esta prestigiosa Universidad la cual abre sus puertas a
jóvenes como nosotros, preparándonos para un futuro competitivo y formándonos como
personas de bien.
i César
A Dios, por darme la vida y la oportunidad de alcanzar una meta más en mi vida.
A mis padres, con tanto sacrificio no dudaron en apoyarme en mis estudios sin esperar otra
recompensa más que la satisfacción de verme convertido en una persona de provecho.
A nuestro asesor de tesis, al Ing. Víctor Lafeld por guiarnos en la elaboración del presente
trabajo de graduación.
Al Prof. Lic. Julio Núñez
por la paciencia durante la realización de las prácticas en el
Laboratorio y por brindarnos su ayuda en los momentos de mayor dificultad.
Agradezco también los profesores que tuvieron que ver con mi formación académica, por
haberme brindado sus conocimientos y amistad.
Gracias!! ii ÍNDICE
Agradecimientos……………………………………………………………………………………..……i
Índice……………………………………………………………………………………….….. ………...iii
Índice de figuras………………………………………………………………………………………......v
Resumen………………………………………………………………………….……………………...viii
Abstract.……………………………………………………………………………………..……….…...ix
1 Introducción……………………………………………..……………………….....................1
1.1 Problematización………………………………………………………………………...…....2
1.2 Justificación………………………………………………………………………………..…3
1.3 Alcance…………………………………………………………………………………….....3
1.4 Objetivo General ………………………………………………………………………….….3
1.5 Objetivos específicos…………………………………………………………………….…..4
2 Marco Referencial…………………………………………………………….…………….…5
2.1 Control Automático…….…………………………………………………….………........…6
2.2 Antecedentes…………………………………………………………………….…………...7
2.3 Definiciones…………………………………………………………………….………….…8
2.4 Sistemas de control en lazo abierto……………………………………….………….......….12
2.5 Sistemas de control en lazo cerrado………………………………………………………....14
2.6 Estrategias de control……………………………………………………………..……........16
2.7 Modelados matemáticos de sistemas dinámicos………………………………..…..….…....18
2.8 Sistemas lineales variantes e invariantes en el tiempo………………………………….…..19
2.9 Función de transferencia y respuesta-impulso………………………………………………21
2.10 Análisis de respuesta transitoria……………………………………………………...….....24
2.11 Estabilidad absoluta, estabilidad relativa y error en estado estable…………………...…..25
2.12 Definiciones de las especificaciones de respuesta transitoria……...………………….......26
2.13 Controladores PID……………………………………………………………….………...30
2.14 Controladores de error cuadrático…………………………………………….……….......36
2.15 Salidas especiales del controlador……………………………………………………........37
2.16 Windup del integrador……………………………………………………………….…….37
2.17 Regla de sintonización para controladores PID……………………………………..……..39
iii 2.17.1 Reglas de Ziegler-Nichols para sintonizar controladores PID…………………………....40
2.17.2 Método de asignación de polos…………………………………………………………..43
2.18 Modificaciones de los esquemas de control PID…………………………….………….…44
2.19 Control PID con más de un grado de libertad………………………………….........……..45
2.20 Bloques funcionales de un sistema eléctrico……………………………………….…...…48
3 Marco Metodológico...……………………………………………………………….……....52
3.1 Tipo de investigación…………………………………………………………….…….……53
3.2 Área de estudio………………………………………………………………….…………..53
3.3 Fuente de información……………………………………………………………………....53
3.5 Métodos, técnicas, instrumentos y procedimientos…………………………….…………...53
3.6 Circuito RLC o Planta……………………………………………………….…….……...…54
3.7 Las etapas del controlador PID………….…………………………………………..………56
3.8 Función de transferencia del controlador……………………………………………..……..59
3.9 Cálculos de los parámetros del compensador mediante MatLab…………………..……......60
3.10 Implementación de la Sisotool de MatLab…………………………………….………..…66
3.11 Cálculo de los valores de los elementos del circuito PID……………………………..…....79
4 Implementación del controlador PID.....................................................................................82
4.1 Selección de componentes para la implementación………………………………………….83
4.2 Pruebas preliminares para la implementación del controlador PID……….…………………85
4.3 Construcción del circuito impreso para el sistema…………………………………………..86
5 Resultados y análisis………………………………………………………..…………..……92
5.1 Simulación de las diferentes partes del sistema en lazo cerrado……………….……………93
5.2 Simulación del sistema mediante Simulink………………………………………………….95
5.3 Pruebas del controlador PID analógico…… ………………………………………….....…103
6 Conclusiones…………………………………………………………………….…..………106
7 Recomendaciones…………………………………………………………………...……….107
8 Bibliografía…...…………………………………………………………………………......108
9 Anexos......................................................................................................................................109
iv ÍNDICE DE FIGURAS
Figura 1.1 Sistema de control en lazo cerrado…..……………………...…………………..……..7
Figura 1.2 Sistema de control simplificado….……………………...…………..…….……...….11
Figura 1.3 Sistemas similares…….……………………………...……………………...……….12
Figura 1.4 Subsistemas en un sistema de control en lazo abierto .………...…………………….14
Figura 1.5 Subsistemas en un control en lazo cerrado .………………...…………………..……15
Figura 1.6 Modo de control de dos posiciones ...…….………………...…………………..……17
Figura 1.7 Control proporcional ……………………………...……………..……………..……17
Figura 1.8 Curvas características para diversas no linealidades …..…...…………………..……20
Figura 1.9 Curva de respuesta escalón unitario en la que se muestran td, tr, tp, Mp y ts ……...…27
Figura 1.10 Especificaciones de la respuesta transitorio……………….....…………..………..…28 Figura 2.1 Método de Ziegler y Nichols …………..…………………...…………………..……41
Figura 2.2 Segundo método de Ziegler-Nichols ……………..………...…………………..……42
Figura 2.3 Control con dos grados de libertad ………………………...…………………..……46
Figura 2.4 Control con dos grados de libertad .………………………...…………………..……46
Figura 3.1 La planta …….……………………………………………...…………………..……54
Figura 3.2 Las etapas del controlador PID……………………………..…………………..……56
Figura 3.3 Parte proporcional …..……………………………………...…………………..……57
Figura 3.4 Parte integral ……………..………………………………...…………………..……58
Figura 3.5 Parte derivativa ……………...……………………………...…………………..……58
Figura 3.6 Lugar de las raíces en lazo abierto …….…………………...…………………..……61
Figura 3.7 Respuesta al escalón en lazo abierto ……….……………....…………………..……62
Figura 3.8 Lugar de las raíces en lazo cerrado sin el compensador……………….………..……63
Figura 3.9 Repuesta al escalón en lazo cerrado sin compensar ………..…………………..……64
Figura 3.10 Repuesta al impulso en lazo cerrado sin el compensador…..……………….…..….65
Figura 3.11 Repuesta a la rampa en lazo cerrado sin compensar ……….…………………..…..66
Figura 3.12 Ventana Inicial de la herramienta SISO Design Tool ……...…..………………..…67
Figura 3.13 Ventana de importación de datos del sistema ……….……...………..…………..…68
v Figura 3.14 Ventana de selección del tipo de repuesta …..……..……...…………………..……68
Figura 3.15 Asignación del overshoot y el setting time …….…………...…………………....…70
Figura 3.16 Tiempo de establecimiento (Ts) …….……………………....…………………..….70
Figura 3.17 Sobrepaso máximo (Mp) ……………………………..……...…………………..…71
Figura 3.18 Lugar de las raíces, overshoot y tiempo de asentamiento …...…………………..…71
Figura 3.19 Ventana de propiedades del compensador ………...………...…………………..…72
Figura 3.20 Asignación de los parámetros del compensador ……….…...…………………..….73
Figura 3.21 Repuesta a un escalón para los parámetros seleccionados ……...… …………..….74
Figura 3.22 Nuevos parámetros del compensador …………………..…...……….………..……75
Figura 3.23 Respuesta final del lazo cerrado de control ……………..…………………….....…76
Figura 3.24 Ventana de importación de datos ……………...…………...………………..…..…77
Figura 4.1 El sistema montado sobre el protoboard ………………………...….……………..……85
Figura 4.2 La señal de entrada y de salida de la función controlada ….....….……………..……86
Figura 4.3 Diseño obtenido en Proteus: ISIS para la realización del circuito impreso…………………..87
Figura 4.4 Diseño obtenido en Proteus: ARES para la realización del circuito impreso…………….…..88
Figura 4.5 El circuito impreso del sistema con sus componentes y los cables de conexión ……………..89
Figura 4.6 Vista superior del prototipo…….…………………………………………………….90
Figura 4.7 Vista lateral del prototipo……………………………………………….……………90
Figura 4.8 Pruebas finales con diferentes tipos de señales…………………………………………..……91
Figura 5.1 diagrama en bloques …………...…………………………...…………………..……93
Figura 5.2 Respuesta del sistema en MatLab ante una entrada de onda cuadrada .………..……95
Figura 5.3 Diagrama de bloques en Simulink …………………..……...…………………..……96
Figura 5.4 Asignación de los parámetros de entrada …...……………...…………………..……97
Figura 5.5 Diagrama modificado ……………………….……………...…………………..……98
Figura 5.6 Propiedades de la salida …….……………………………...…………………..……99
vi Figura 5.7 Asignación de tiempo de simulación ……..………………...…………………..……99
Figura 5.8 Simulación ………………………………………..………...………..……………..100
Figura 5.9 Las señales del sistema para una entrada cuadrada ……….....……………………..100
Figura 5.10 Las señales del sistema para una entrada senoidal …………………………..……101
Figura 5.11 Las señales del sistema para una entrada diente de sierra……………………...….102
Figura 5.12 Las señales del sistema para una entrada de onda cuadrada ……………………...103
Figura 5.13 Las señales del sistema para una entrada senoidal …………...………...…………104
Figura 5.14 Las señales del sistema para una entrada diente de sierra ………...………………104
Figura 9.1 Instrucciones de uso………………………………………………………...………110
Figura 9.2 Pruebas preliminares ………………….……………………..……………………….111
Figura 9.3 Respuesta antes una señal diente de sierra …………………………….……………….111
Figura 9.4 El sistema de control completo en Proteus (ISIS)……………...……………………….112
Figura 9.5 Diagrama de conexiones del LM324 ..……………………..……………………….112
vii Resumen
En este trabajo se presenta el diseño y la construcción de un controlador electrónico para una
planta de tipo eléctrica, un circuito RLC (resistivo-inductivo-capacitivo) de segundo orden.
La planta consta de dos elementos resistivos, un elemento inductivo y un elemento capacitivo
dispuestos en una configuración sencilla. El controlador es de tipo PID (Proporcional-IntegralDerivativo) realizado con componentes electrónicos como amplificadores operacionales,
capacitores, resistencias fijas y variables.
El compensador se diseña de tal forma que sus parámetros sean variables para así poder tener un
control dinámico sobre la planta. Cada parte del controlador tiene un potenciómetro y mediante
este, se puede modificar, ya sea el tiempo proporcional, el tiempo derivativo o el tiempo integral,
de acuerdo a las especificaciones requeridas.
El sistema en lazo cerrado es un sistema con realimentación unitaria y el controlador se sitúa en
serie con la planta. Tanto la realimentación unitaria como el sumador de señales se realizan
mediante configuraciones sencillas de amplificadores operacionales.
Palabras claves: Control automático, controlador PID, MatLab, modelado matemático,
amplificador operacional, polos, ceros, etc.
viii Abstract
This paper presents the design and construction of an electronic controller for an electric type
plant, an RLC circuit (resistive-inductive-capacitive) of second order.
The plant consists of two resistive elements, an inductive element and a capacitive element
arranged in a simple configuration. The controller is PID (Proportional-Integral-Derivative)
made with electronic components such as operational amplifiers, capacitors, fixed and variable
resistors.
The compensator is designed so that their parameters are variables in order to have dynamic
control over the plant. Each part of the controller has a potentiometer and by this you can change
either the time proportional, derivative time or integral time, according to the required
specifications.
The system is a closed loop feedback system and the controller unit is placed in series with the
ground. Both unity feedback signal as the adder configurations are performed using simple
operational amplifiers.
Keywords: Automatic Control, PID controller, MatLab, mathematical modeling, operational
amplifier, poles, zeros, etc..
ix 1 Introducción
Los sistemas de control de procesos son, hoy en día, de amplia utilización en diferentes
actividades por las facilidades que brinda, las cuales se pueden citar a continuación: bajo costo
de operación, mejor productividad, velocidad en el trabajo y mayor confiabilidad en los
procesos. Otra función de los sistemas de control es evitar fallas en los procesos, ya que debido a
estos se podrían generar grandes pérdidas tanto humanas como de producción.
Uno de los controladores electrónicos más utilizado es el controlador PID, porque permite
realizar control de una gran cantidad de sistemas. Para este tipo de controlador existen diversas
configuraciones, de las cuales, algunas son más flexibles que otras, en cuanto a modificaciones
de las acciones de control que lo componen.
El controlador PID tiene diversas funciones importantes, se pueden citar: proporciona la
realimentación, tiene la habilidad de eliminar el error en estado estacionario, a través de la acción
integral, puede hacer la predicción a través de la acción derivativa.
El proyecto consiste en que: Dada una planta RLC, realizar los cálculos matemáticos a mano y
con la ayuda del software MatLab 7.10 y otras herramientas informáticas, hallar los parámetros
del controlador PID de modo que cumpla con las especificaciones dadas, tales como el tiempo de
asentamiento, sobrepaso máximo, etc.
El sistema pretende ser montado en un prototipo en el Laboratorio de Electrónica de la Facultad
de Ciencias y Tecnología, para de este modo, contribuir con una herramienta de ayuda a los
docentes y estudiantes en el desarrollo de prácticas de la teoría de control.
El software MatLab se ha constituido en un programa de alto nivel bastante utilizado en los diseños de control y servirá para la simulación del modelo matemático del sistema a fin de
obtener los valores a utilizarse en el controlador del proceso, además, ayudará en la estimación
del modelo del sistema real (prototipo).
1 En la sección 1 se presenta un breve resumen de lo que es el proyecto, su importancia, los
objetivos generales y específicos.
En la sección 2 se describe detalladamente un sistema de control, antecedentes, definiciones,
tipos de sistemas, estrategias de control, los elementos que lo conforman, modelados
matemáticos de sistemas dinámicos, función de transferencia, señales de prueba típicas,
estabilidad. Conceptos básicos del controlador PID, métodos de sintonización y modificaciones
de los esquemas de control PID.
La sección 3 incluye el marco metodológico, el procedimiento a seguir para el diseño del
controlador PID, se describe el modelado matemático, las especificaciones del sistema y el
cálculo de los parámetros del controlador mediante Matlab.
En la sección 4 se detalla la implementación del controlador PID, la elección y características de
los componentes y herramientas utilizadas, también las pruebas preliminares realizadas.
En la sección 5 se ilustran los resultados obtenidos en las pruebas de laboratorio y las
simulaciones informáticas con MatLab y Proteus.
1.1 Problematización
Hoy en día el control de proceso es usado en una diversidad de ámbitos por la eficiencia y la
seguridad que dan a los sistemas en general, dicho control se realiza por medio de dispositivos
físicos o de software. El controlador PID es utilizado extensamente por las importantes funciones
que realiza, las cuales permite un amplio control de los múltiples procesos existentes.
En la actualidad son muchas las funciones y problemas que se trabajan mediante el
procesamiento de señales digitales, tales como microcontroles y microcomputadores, pero aun
así son necesarios los circuitos analógicos que sirven como interfaz para permitir acondicionar
las señales en un determinado proceso. Existen diversos circuitos necesarios para realizar
2 diversas operaciones que usan dispositivos analógicos como amplificadores operacionales,
circuitos integrados, etc.
Con el objeto de atraer el interés del estudiantado hacia el aprendizaje de la teoría de control y
además para brindar apoyo en la enseñanza de la misma, este proyecto brinda una ayuda para el
análisis y control de las señales eléctricas más comunes, tales como ondas cuadradas, senoidales,
escalón, etc.
1.2 Justificación
En la actualidad los sistemas de control han asumido un papel cada vez más importante en el
desarrollo de la humanidad y la tecnología, prácticamente cada actividad que realizamos a diario
está afectada por algún tipo de sistema de control y para optimizarla requieren ciertas estrategias
de control, además está presente en casi todos los procesos modernos industriales y en el control
de calidad de productos manufacturados.
Con este proyecto se pretende que el docente y el alumno cuenten con una herramienta para
visualizar y comprender mejor como se puede controlar un proceso variando algunos parámetros
del mismo.
1.3 Alcance y delimitación
Este proyecto abarca el diseño de un sistema de control de tipo eléctrico-electrónico, incluyendo
cálculos matemáticos manuales y con ayuda de programas informáticos. Además, el desarrollo
de un prototipo para el Laboratorio de Electrónica de la Facultad de Ciencias y Tecnología de la
Universidad Nacional de Itapúa, pretendiéndose con esto colaborar con una herramienta de
práctica de control automático. El prototipo final se limita a la planta (circuito RLC), su
controlador (PID), la fuente de alimentación. No incluye cables de conexión ni instrumentos
(generador de señales, osciloscopio, multímetro) que complementan y son necesarios para
realizar para realizar las prácticas.
3 1.4 Objetivo General
Desarrollar un controlador PID análogo para un circuito RLC de segundo orden, para que el
Laboratorio de Electrónica cuente con esta herramienta y así el alumno pueda confrontar los
conocimientos teóricos con la práctica.
1.5 Objetivos Específicos
Determinar la función de transferencia de la planta o circuito RLC.
Calcular mediante Matlab 7.10 la función de transferencia del controlador con los
parámetros de diseño establecidos.
Obtener la función de transferencia del controlador basado en el circuito con
amplificadores operacionales (Proporcional – Integral – Derivativo).
Simular el sistema de control en lazo cerrado compensado y no compensado ante una
entrada escalón.
Verificar el funcionamiento con componentes reales.
Elaborar el prototipo del sistema completo.
4 2 Marco Referencial
5 2.1 Control automático “El control automático ha desempeñado una función vital en el avance de la ingeniería y la
ciencia. Además de su extrema importancia en los sistemas de vehículos espaciales, sistemas
guía de misiles, robóticos y similares; el control automático se ha vuelto una parte importante e
integral de los procesos modernos industriales y de manufactura. Por ejemplo, el control
automático es esencial en el control numérico de las máquinas-herramientas de las industrias de
manufactura, en el diseño de sistemas de pilotos automáticos en la industria aeroespacial, y en el
diseño de automóviles y camiones en la industria automotriz. También es esencial en las
operaciones industriales como el control de presión, temperatura, humedad, viscosidad y flujo en
las industrias de proceso.”¹
Debido a que los avances en la teoría y la práctica del control automático, que aportan los medios
para llegar a obtener un desempeño óptimo de los sistemas dinámicos, mejorar la productividad,
aligerar la carga de muchas operaciones manuales repetitivas y rutinarias, así como de otras
actividades, casi todos los ingenieros y científicos deben tener un buen conocimiento de este
campo.
El diseño de sistemas de control se puede realizar, ya sea en el dominio del tiempo o en el de la
frecuencia. A menudo se emplean especificaciones de diseño para describir que debe hacer el
sistema y cómo hacerlo. Siendo estas únicas para cada diseño.
Por lo tanto el diseño de sistemas de control involucra tres pasos:
1. Determinar que debe hacer el sistema y cómo hacerlo.
2. Determinar la configuración del compensador.
3. Determinar los valores de los parámetros del controlador para alcanzar los objetivos de diseño.
1
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Edit. Prentice Hall. Pág. 1
6 Figura 1.1 Sistema de control en lazo cerrado.
Fuente: Ingeniería de Control Moderna, K. Ogata.
Donde X(s) es la señal de entrada, e(s) la señal de error e Y(s) la señal de salida.
2.2 Antecedentes del Sistema de Control Automático
“El primer trabajo significativo en control automático fue el regulador de velocidad centrífugo de
James Watt para el control de la velocidad de una máquina de vapor, en el siglo XVIII.
Minorsky, Hazen y Nyquist, entre muchos otros, aportaron trabajos importantes en las etapas
iniciales del desarrollo de la teoría de control. En 1922, Minorsky trabajó en los controladores
automáticos para dirigir embarcaciones, y mostró que la estabilidad puede determinarse a partir
de las ecuaciones diferenciales que describen el sistema. En 1932, Nyquist diseñó un
procedimiento relativamente simple para determinarla estabilidad de sistemas en lazo cerrado,
con base en la respuesta en lazo abierto en estado estable cuando la entrada aplicada es una
senoidal. En 1934, Hazen, quien introdujo el término servomecanismos para los sistemas de
control de posición, analizó el diseño de los servomecanismos con relevadores, capaces de seguir
con precisión una entrada cambiante.” 2
Durante la década de los cuarenta, los métodos de la respuesta en frecuencia hicieron posible que
se diseñaran sistemas de control lineales en lazo cerrado que cumplieran con los requerimientos
de desempeño. A finales de los años cuarenta y principios de los cincuenta, se desarrolló por
completo el método del lugar geométrico de las raíces propuesto por Evans.
2
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Edit. Prentice Hall. Pág. 2
7 Los métodos de respuesta en frecuencia y del lugar geométrico de las raíces, que forman el
núcleo de la teoría de control clásica, conducen a sistemas estables que satisfacen un conjunto
más o menos arbitrario de requerimientos de desempeño. En general, estos sistemas son
aceptables pero no óptimos en forma significativa, porque no tienen en cuenta todas las variables
intervinientes. Desde el final de la década de los cincuenta, el énfasis en los problemas de diseño
de control se ha movido del diseño de uno de muchos sistemas que trabajen apropiadamente al
diseño de un sistema óptimo de algún modo significativo.
Conforme las plantas modernas con muchas entradas y salidas se vuelven más complejas, la
descripción de un sistema de control moderno requiere de una gran cantidad de ecuaciones. La
teoría del control clásica, que trata de los sistemas con una entrada y una salida, pierde su solidez
ante sistemas con entradas y salidas múltiples. Desde alrededor de 1960, debido a que la
disponibilidad de las computadoras digitales hizo posible el análisis en el dominio del tiempo de
sistemas complejos, la teoría de control moderna, basada en el análisis en el dominio del tiempo
y la síntesis a partir de variables de estados, se ha desarrollado para enfrentar la creciente
complejidad de las plantas modernas y los requerimientos limitativos respecto de la precisión, el
peso y el costo en aplicaciones militares, espaciales e industriales.
Durante los años comprendidos entre 1960 y 1980 se investigaron a fondo el control óptimo
tanto de sistemas determinados como estocásticos, y el control adaptable, mediante aprendizaje
de sistemas complejos. De 1980 a la fecha, los descubrimientos en la teoría de control moderno
se centraron en el control robusto, el control de H, y temas asociados.
Ahora que las computadoras digitales se han vuelto más baratas y más compactas, se usan como
parte integral de los sistemas de control. Las aplicaciones recientes de la teoría de control
moderna incluyen sistemas ajenos a la ingeniería, como los biológicos, biomédicos, económicos
y socioeconómicos.
8 2.3
A continuación se definen ciertos términos básicos de un sistema de control
Variable controlada
“Controlar significa medir el valor de la variable controlada del sistema y aplicar la variable
manipulada al sistema para corregir o limitar una desviación del valor medido a partir de un
valor deseado.” 3
La variable controlada es la cantidad o condición que se mide y controla.
Variable manipulada
“La variable manipulada es la cantidad o condición que el controlador modifica para afectar el
valor de la variable controlada. Por lo común, la variable controlada es la salida (el resultado) del
sistema.” 4
En el estudio de la ingeniería de control, se necesita definir términos adicionales que resultan
necesarios para describir los sistemas de control.
Plantas
“Una planta puede ser una parte de un equipo, o también un conjunto de las partes de una
máquina que funcionan juntas, el propósito de la cual es ejecutar una operación particular.
Llamamos planta a cualquier objeto físico que se va a controlar (tal como un dispositivo
mecánico, un horno de calefacción, un reactor químico o una nave espacial.”5
3
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Edit. Prentice Hall. Pág. 2
4
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Edit. Prentice Hall. Pág. 3
5
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Edit. Prentice Hall. Pág. 3
9 Perturbaciones
“Una perturbación es una señal que tiende a afectar negativamente el valor de la salida de un
sistema. Si la perturbación se genera dentro del sistema se denomina interna, en tanto que una
perturbación externa se produce fuera del sistema y es una entrada.”6 Ejemplos de estas señales
de perturbación interna: el voltaje de ruido térmico en los circuitos electrónicos y el ruido de
conmutación de los motores eléctricos. Un ejemplo de perturbación externa es el viento que
actúa sobre una antena.
Procesos
“El Diccionario Merriam-Webster define un proceso como una operación o un desarrollo
natural progresivamente continuo, marcado por una serie de cambios graduales que se suceden
uno al otro en una forma relativamente fija y que conducen a un resultado o propósito
determinados; o una operación artificial o voluntaria progresiva que consiste en una serie de
acciones o movimientos controlados, sistemáticamente dirigidos hacia un resultado o propósito
determinados.”7 Se llamará proceso a cualquier operación que se va a controlar, algunos
ejemplos son los procesos químicos, económicos y biológicos.
Sistema
“Un sistema es una combinación de componentes que actúan juntos y realizan un objetivo
determinado. Un sistema no necesariamente es físico. El concepto de sistemas se aplica a
fenómenos abstractos y dinámicos, tales como los que se encuentran en la economía. Por tanto,
la palabra sistema debe interpretarse como una implicación de sistemas físicos, biológicos,
económicos y similares.”8
6
7
8
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Edit. Prentice Hall. Pág. 3
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Edit. Prentice Hall. Pág. 3
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Edit. Prentice Hall. Pág. 4
10 El término sistema se emplea específicamente para describir un conjunto de componentes que
interactúan, alrededor de los cuales se dibuja una frontera imaginaria de modo que sólo es de
interés la interacción entre la entrada o entradas y su salida o salidas, sin necesidad de estudiar en
detalle las interacciones entre los componentes que lo forman. Así el aspecto importante en un
sistema es la relación entre las entradas y salidas. En la figura 1.2 muestra cómo es posible
representar un sistema mediante una caja de entrada y de salida al sistema indicada por líneas
con flechas, en lo que la dirección de las flechas hace referencia ya sea a una entrada o a una
salida.
Entrada
Sistema de control Salida
Figura 1.2 Sistema de control simplificado.
Fuente: Elaboración propia.
La ventaja de estudiar los sistemas de esta manera es que aunque existe una amplia variedad de
sistemas posibles, la relación entre la salida y la entrada de muchos de ellos tiende a ser similar.
Así por ejemplo, la respuesta de un sistema eléctrico formado por un capacitor en serie con un
resistor y la aplicación súbita de un voltaje tiene el mismo tipo de relación que la respuesta de un
contenedor de líquido al cual se le aplica súbitamente una entrada de calor figura 1.3. De este
modo, al estudiar uno de estos modelos con este tipo de relación entre entrada y salida es posible
determinar cómo responderán muchas formas diferentes, con la misma relación salida-entrada.
11 Entrada Salida Sistema RC
Voltaje Vc Vc 0 Tiempo
a)
Entrada Sistema
Ede
ntrada Salida calefacción
Calor Temperatura stema RC Temperatura 0 Tiempo b)
Figura 1.3 Sistemas similares a) Sistema RC, b) Sistema de calefacción.
Fuente: Ingeniería de Control, W. Bolton.
12 2.4 Sistemas de control en lazo abierto
“Los sistemas en los cuales la salida no afecta la acción de control se denominan sistemas de
control en lazo abierto. En otras palabras, en un sistema de control en lazo abierto no se mide la
salida ni se realimenta para compararla con la entrada. Un ejemplo práctico es una lavadora. El
remojo, el lavado y el enjuague en la lavadora operan con una base de tiempo. La máquina no
mide la señal de salida, que es la limpieza de la ropa.”9
En cualquier sistema de control en lazo abierto, la salida no se compara con la entrada de
referencia. Por tanto, a cada entrada de referencia le corresponde una condición operativa fija;
como resultado, la precisión del sistema depende de la calibración. Ante la presencia de
perturbaciones, un sistema de control en lazo abierto no realiza la tarea deseada. En la práctica,
el control en lazo abierto sólo se usa si se conoce la relación entre la entrada y la salida y si no
hay perturbaciones internas ni externas. Es evidente que estos sistemas no son de control
realimentado. Se observa que cualquier sistema de control que opere con una base de tiempo es
en lazo abierto. Por ejemplo, el control del tránsito mediante señales operadas con una base de
tiempo es otro ejemplo de control en lazo abierto.
Elementos básicos de un sistema de control en lazo abierto
Se puede considerar que un sistema en lazo abierto consiste en algunos subsistemas básicos
arreglados como se muestra en la Figura 1.4. Estos elementos pueden ser distintos, equipos
separados, por todas las funciones que cumple cada subsistema se debe preservar. La entrada
global al sistema es una señal, que, basada en experiencias anteriores, es probable que conduzca
a la salida requerida. Los subsistemas son:
1
Elementos de control. Este elemento determina qué acción se va a tomar dada una
entrada al sistema de control.
9
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Edit. Prentice Hall. Pág. 7
13 2
Elemento de corrección: corresponde a la entrada que viene del elemento de control e
inicia la acción para producir el cambio en la variable controlada al valor requerido.
Los dos primeros subsistemas a menudo se unen para formar un elemento denominado
controlador.
3
Proceso. El proceso o planta es el sistema en el que se va a controlar la variable.
“Muchos sistemas de control en lazo abierto utilizan un elemento de control que envía una señal
para iniciar una secuencia de señales para iniciar secuencia de acciones en tiempos diferentes. En
tales sistemas el controlador es en esencia un dispositivo de conmutación operado por un
reloj.”10
Controlador Entrada Salida Proceso Elemento de Elemento de corrección control Señal que se espera
Variable
produzca la salida
controlada
requerida
Figura 1.4 Subsistemas en un sistema de control en lazo abierto.
stema RC stema RC stema RC Fuente: Ingeniería de Control, W. Bolton.
2.5 Sistemas de control en lazo cerrado
“Los sistemas de control realimentados se denominan también sistemas de control en lazo
cerrado. En la práctica, los términos control realimentado y control en lazo cerrado se usan
indistintamente. En un sistema de control en lazo cerrado, se alimenta al controlador la señal de
error de actuación, que es la diferencia entre la señal de entrada y la señal de realimentación (que
10
WILLIAM BOLTON, Ingeniería de Control, 2ª Ed. 2006, Alfaomega. Pág. 6
14 puede ser la señal de salida misma o una función de la señal de salida y sus derivadas y/o
integrales), a fin de reducir el error y llevar la salida del sistema a un valor conveniente. El
término control en lazo cerrado siempre implica el uso de una acción de control realimentado
para reducir el error del sistema.” 11
Elementos básicos de un sistema de control en lazo cerrado
Se puede considerar que un sistema en lazo cerrado consiste en algunos subsistemas básicos
ordenados como muestra la figura 1.4. Estos elementos pueden no ser partes distintas o equipos
separados, pero todas las funciones de los subsistemas estarán presentes. La entrada global de
control es el valor requerido de la variable y la salida es el valor real de la variable.
1 Elemento de comparación. Este elemento compara el valor requerido o de referencia de la
variable por controlar con el valor medido de lo que se obtiene a la salida, y produce una señal de
error la cual indica la diferencia del valor obtenido a la salida y el valor requerido.
Señal de error = señal de referencia - señal del valor medido
2 Elemento de control. Este elemento decide que acción tomar cuando se recibe una señal de
error. A menudo se utiliza el término controlador para un elemento que incorpora el elemento de
control y la unidad de corrección.
3 Elemento de corrección. Este elemento se utiliza para producir un cambio en el proceso al
eliminar el error, y con frecuencia se denomina actuador.
4
11
Elemento proceso. El proceso, o planta, es el sistema donde se va a controlar la variable.
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 55
15 5 Elemento de medición. Este elemento produce una señal relacionada con la condición de la
variable controlada, y proporciona la señal de realimentación al elemento de comparación para
determinar si hay o no error.
Se dice que se tiene realimentación negativa cuando la señal realimentada se sustrae del valor de
referencia, esto es,
Señal de error = valor de referencia – señal de realimentación
La realimentación negativa es necesaria para que logre el control. La realimentación positiva se
presenta cuando la señal realimentada se adiciona al valor de referencia, esto es,
Señal de error = valor de referencia + señal de realimentación
Controlador
Elemento de
comparación
+
Entrada
Valor de
Referencia
controlada
-
Señal de
error
Elemento de
control
Elemento de
corrección
Elemento de
proceso
stema RC stema RC stema RC Realimentación
Elemento de
medición
Salida
variable
Figura 1.5 Subsistemas en un control de control en lazo cerrado.
stema RC W. Bolton.
Fuente: Ingeniería de
Control,
En la figura 1.5 la señal de realimentación se combina con el valor de referencia en el elemento
de comparación. El elemento de comparación se indica mediante un círculo con una cruz, éste es
el símbolo genérico para indicar un elemento de suma. Cuando en el elemento de comparación
hay realimentación negativa, el valor de referencia se marca como una señal positiva y la señal
de realimentación con negativa de modo que la salida del elemento de comparación es la
16 referencia entre las señales. Si hubiera realimentación positiva en el elemento de suma, entonces
ambas señales deben marcarse con positivas.
2.6 Estrategias de control
“El elemento de control tiene como entrada la señal de error y como salida una señal que se
convierte en la entrada a la unidad de corrección de modo que se pueda iniciar la acción para
eliminar el error. Existen varias formas, tales como: el control on-off, el control proporcional,
etc., para que el elemento de control reaccione ante una señal de error.”12
“Con sistemas de control en lazo abierto los tipos de control más probables son el de dos
posiciones (encendido-apagado o mejor conocido como on-off) o secuencias o acciones
conmutadas por tiempo. Una ejemplo del control on-off es una persona que enciende un
calefactor eléctrico para obtener la temperatura requerida en una habitación. Un ejemplo de una
secuencia conmutada por tiempo es la operación de la lavadora de ropa doméstica.” 13
“Con sistemas de control en lazo cerrado los tipos de control son a menudo el control de dos
posiciones, el control proporcional o el control proporcional combinado con algún otro
refinamiento.”
14
Con el modo de control de dos posiciones, la señal de error de entrada al
elemento de control es una salida de encendido o de apagado, que se utiliza para encender o
apagar al elemento de corrección (figura 1.6). Así en el caso del sistema de calefacción central
doméstico controlado por un termostato, éste produce una salida que enciende o apaga el
calefactor según el error. Si la temperatura de la habitación baja a cierto valor, entonces el
termostato enciende el calefactor; si por el contrario, la temperatura rebasa el valor fijado, el
calefactor se apaga.
12
WILLIAM BOLTON, Ingeniería de Control, 2ª Ed. 2006, Alfaomega. Pág. 15
WILLIAM BOLTON, Ingeniería de Control, 2ª Ed. 2006, Alfaomega. Pág. 15
14
WILLIAM BOLTON, Ingeniería de Control, 2 ª Ed. 2006, Alfaomega. Pág. 16
13
17 Salida
Error
0
+
Figura 1.6 Modo de control de dos posiciones.
Fuente: Ingeniería de Control, W. Bolton.
“Con el control proporcional la salida del elemento de control es una señal, la cual es
proporcional al error: cuanto mayor sea el error mayor será la salida (figura 1.7). Esto significa
que el elemento de corrección recibirá una señal que depende de la magnitud de la corrección
que se necesita.” 15
Salida
0
+
Error
Figura 1.7 Control proporcional.
Fuente: Ingeniería de Control, W. Bolton.
15
WILLIAM BOLTON, Ingeniería de Control, 2ª Ed. 2006, Alfaomega. Pág. 17
18 “Debido que el control proporcional por si solo puede presentar algunos problemas, con
frecuencia se combina con otras formas de control. Existe el control derivativo, donde la salida
es proporcional a la razón de cambio de la señal de error, y el control integral, donde la salida en
el tiempo t es proporcional a la integral de la señal de error entre r = 0 y t. Un ejemplo sencillo
del control proporcional derivativo es un vehículo automático donde el controlador toma
acciones basadas no solo en el conocimiento de la posición del vehículo, sino también de su
velocidad, es decir, la razón de cambio de la distancia. Con sólo el control proporcional, el
controlador da nada más una repuesta en proporción a la magnitud del error de la posición
requerida. No toma en cuenta la rapidez del cambio del error. El control derivativo si lo hace.
Así, el vehículo se empieza a mover alejándose rápido de la trayectoria requerida, con el control
derivativo habrá una acción correctiva mucho mayor que si el vehículo se alejara lentamente de
la trayectoria requerida. De este modo, la combinación del control proporcional derivativo toma
en cuenta más rápido las desviaciones de la trayectoria requerida y las corrige.” 16
2.7 Modelados matemáticos de sistemas dinámicos
Sistemas lineales
“Un sistema se denomina lineal si se aplica el principio de superposición. Este principio
establece que la respuesta producida por la aplicación simultánea de dos funciones de entradas
diferentes es la suma de las dos respuestas individuales. Por tanto, para el sistema lineal, la
respuesta a varias entradas se calcula tratando una entrada a la vez y sumando los resultados.
Este principio permite desarrollar soluciones complicadas para la ecuación diferencial lineal a
partir de soluciones simples.”17 Si en una investigación experimental de un sistema dinámico son proporcionales la causa y el
efecto, lo cual implica que se aplica el principio de superposición, el sistema se considera lineal.
16
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 58
17
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 59
19 2.8 Sistemas lineales invariantes y variantes con el tiempo
Una ecuación diferencial es lineal si sus coeficientes son constantes o son funciones sólo de la
variable independiente. Los sistemas dinámicos formados por componentes de parámetros
concentrados lineales invariantes con el tiempo se describen mediante ecuaciones diferenciales
lineales invariantes con el tiempo (de coeficientes constantes). Tales sistemas se denominan
sistemas lineales invariantes con el tiempo (o lineales de coeficientes constantes). Los sistemas
que se representan mediante ecuaciones diferenciales cuyos coeficientes son funciones del
tiempo, se denominan sistemas lineales variantes con el tiempo. Un ejemplo de un sistema de
control variante con el tiempo es un sistema de control de naves espaciales. (La masa de una
nave espacial cambia debido al consumo de combustible.)
Sistemas no lineales
“Un sistema es no lineal si no se aplica el principio de superposición. Por tanto, para un sistema
no lineal la respuesta a dos entradas no puede calcularse tratando cada una a la vez y sumando
los resultados. Los siguientes son ejemplos de ecuaciones diferenciales no lineales.”18
2
2 +
2
²+ = A sin
2 + 2 −1
+ =0
2
2 +
+ + 3 =0 Aunque muchas relaciones físicas se representan a menudo mediante ecuaciones lineales, en la
mayor parte de los casos las relaciones reales no son verdaderamente lineales. De hecho, un
18
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 59
20 estudio cuidadoso de los sistemas físicos revela que incluso los llamados “sistemas lineales sólo
lo son en rangos de operación limitados. En la práctica, muchos sistemas electromecánicos,
hidráulicos, neumáticos, etc., involucran relaciones no lineales entre las variables. Por ejemplo,
la salida de un componente puede saturarse para señales de entrada grandes. Puede haber una
zona muerta que afecte las señales pequeñas. (La zona muerta de un componente es un rango
pequeño de variaciones de entrada ante las cuales el componente es insensible.) Puede ocurrir
una no linealidad de la ley cuadrática en algunos componentes. Por ejemplo, los amortiguadores
que se utilizan en los sistemas físicos pueden ser lineales para operaciones a baja velocidad, pero
pueden volverse no lineales a altas velocidades, y la fuerza de amortiguamiento puede hacerse
proporcional al cuadrado de la velocidad de operación. Algunos ejemplos de las curvas
características para estas no linealidades aparecen en la (figura 1.8).
No linealidad
de saturación
No linealidad
de zona muerta
No linealidad
de ley cuadrática Figura 1.8 Curvas características para diversas no linealidades.
Fuente: Ingeniería de Control, W. Bolton.
Observe que algunos sistemas de control importantes son no lineales para señales de cualquier
tamaño. Por ejemplo, en los sistemas de control de encendido y apagado, la acción de control
está activada o no activada, y no hay una relación lineal entre la entrada y la salida del
controlador.
En general, los procedimientos para encontrar las soluciones a problemas que involucran tales
sistemas no lineales son muy complicados. Debido a la dificultad matemática aunada a los
21 sistemas no lineales, resulta necesario introducir los sistemas lineales “equivalentes” en lugar de
los no lineales. Tales sistemas lineales equivalentes sólo son válidos para un rango limitado de
operación. Una vez que se aproxima un sistema no lineal mediante un modelo matemático lineal,
pueden aplicarse varias herramientas lineales para análisis y diseño.
2.9 Función de transferencia y de Respuesta-Impulso
En la teoría de control, a menudo se usan las funciones de transferencia para caracterizar las
relaciones de entrada-salida de componentes o de sistemas que se describen mediante ecuaciones
diferenciales lineales invariantes con el tiempo. Empezaremos por definir la función de
transferencia. A continuación se analiza la función de respuesta-impulso.
Función de transferencia
“La función de transferencia de un sistema descrito mediante una ecuación diferencial lineal e
invariante con el tiempo se define como el cociente entre la transformada de Laplace de la salida
(función de respuesta) y la transformada de Laplace de la entrada (función de excitación) bajo la
suposición de que todas las condiciones iniciales son cero.”19
Considere el sistema lineal e invariante con el tiempo descrito mediante la siguiente ecuación
diferencial:
en donde (y) es la salida del sistema y (x) es la entrada. La función de transferencia de este
sistema se obtiene tomando la transformada de Laplace de ambos miembros de la ecuación (3-l),
bajo la suposición de que todas las condiciones iniciales son cero, o bien,
19
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 60
22 Función de transferencia = G(s) = £[
]£[
]
condiciones iniciales cero
A partir del concepto de función de transferencia, es posible representar la dinámica de un
sistema mediante ecuaciones algebraicas en s. Si la potencia más alta de s en el denominador de
la función de transferencia es igual a n, el sistema se denomina sistema de n-ésimo orden.
“La aplicación del concepto de función de transferencia está limitada a los sistemas descritos
mediante ecuaciones diferenciales lineales invariantes con el tiempo. Sin embargo, el enfoque de
la función de transferencia se usa extensamente en el análisis y diseño de dichos sistemas.”20 A
continuación se presentan algunos comentarios importantes relacionados con la función de
transferencia. (Observe que, en la lista, los sistemas a los que se hace referencia son aquellos que
se describen mediante una ecuación diferencial lineal e invariante con el tiempo).
1
La función de transferencia de un sistema es un modelo matemático porque es un método
operacional para expresar la ecuación diferencial que relaciona la variable de salida con la
variable de entrada.
2 La función de transferencia es una propiedad de un sistema, independiente de la magnitud y
naturaleza de la entrada o función de excitación.
3 La función de transferencia incluye las unidades necesarias para relacionar la entrada con la
salida; sin embargo, no proporciona información acerca de la estructura física del sistema. (Las
funciones de transferencia de muchos sistemas físicamente diferentes pueden ser idénticas.)
5 Si se conoce la función de transferencia de un sistema, se estudia la salida o respuesta para
varias formas de entrada, con la intención de comprender la naturaleza del sistema.
20
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 61
23 5 Si se desconoce la función de transferencia de un sistema, puede establecerse
experimentalmente introduciendo entradas conocidas y estudiando la salida del sistema. Una vez
establecida una función de transferencia, proporciona una descripción completa de las
características dinámicas del sistema, a diferencia de su descripción física.
Respuesta-impulso
Considere la salida (respuesta) de un sistema para una entrada impulso unitario cuando las
condiciones iniciales son cero. Debido a que la transformada de Laplace de la función impulso
unitario es la unidad, la transformada de Laplace de la salida del sistema es
Y(s) = G(s)
La transformada inversa de Laplace de la salida obtenida mediante la ecuación proporciona la
respuesta-impulso del sistema. La transformada inversa de Laplace de G(s), o bien
£¹ [G(s)] = g (t)
se denomina respuesta-impulso. Esta respuesta g (t) también se denomina función de
ponderación del sistema.
Por tanto, “la respuesta-impulso g (t) es la respuesta de un sistema lineal a una entrada impulso
unitario cuando las condiciones iniciales son cero. La transformada de Laplace de esta función
proporciona la función de transferencia. Por tanto, la función de transferencia y la respuestaimpulso de un sistema lineal e invariante con el tiempo contienen la misma información acerca
de la dinámica del sistema. De esta manera, si se excita el sistema con una entrada impulso y se
mide la respuesta, es posible obtener una información completa acerca de sus características
dinámicas. (En la práctica, una entrada pulso con una duración muy corta comparada con las
constantes de tiempo significativas del sistema se considera un impulso).”21
21
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 63
24 2.10 Análisis de la respuesta transitoria
Señales de prueba típicas
“Las señales de prueba que se usan regularmente son funciones escalón, rampa, parábola,
impulso, senoidales, etc. Con estas señales de prueba, es posible realizar con facilidad análisis
matemáticos y experimentales de sistemas de control, dado que las señales son funciones del
tiempo muy simples.” 22
“La forma de la entrada a la que el sistema estará sujeto con mayor frecuencia bajo una
operación normal determina cuál de las señales de entrada típicas se debe usar para analizar las
características del sistema. Si las entradas para un sistema de control son funciones del tiempo
que cambian en forma gradual, una función rampa sería una buena señal de prueba. Asimismo, si
un sistema está sujeto a perturbaciones repentinas una función escalón sería una buena señal de
prueba; y para un sistema sujeto a entradas de choque, una función impulso sería la mejor. Una
vez diseñado un sistema de control con base en las señales de prueba, por lo general el
desempeño del sistema en respuesta a las entradas reales es satisfactorio. El uso de tales señales
de prueba permite comparar el desempeño de todos los sistemas sobre la misma base.” 23
Respuesta transitoria y respuesta en estado estable
“La respuesta en el tiempo de un sistema de control consta de dos partes: la respuesta transitoria
y la respuesta en estado estable. Por respuesta transitoria nos referimos a la que va del estado
inicial al estado final. Por respuesta en estado estable, nos referimos a la manera en la cual se
comporta la salida del sistema conforme t tiende a infinito.” 24
22
23
24
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 134
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 134
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 135
25 2.11 Características del comportamiento dinámico de un sistema de control
Al diseñar un sistema de control, se debe ser capaz de predecir su comportamiento dinámico a
partir del conocimiento de los componentes. La característica más importante del
comportamiento dinámico de un sistema de control es la estabilidad absoluta, es decir, si el
sistema es estable o inestable. “Un sistema de control está en equilibrio si, en ausencia de
cualquier perturbación o entrada, la salida permanece en el mismo estado. Un sistema de control
lineal e invariante con el tiempo es estable si la salida termina por regresar a su estado de
equilibrio cuando el sistema está sujeto a una condición inicial. Un sistema de control lineal e
invariante con el tiempo es críticamente estable si las oscilaciones de la salida continúan para
siempre. Es inestable si la salida diverge sin límite a partir de su estado de equilibrio cuando el
sistema está sujeto a una condición inicial.” 25 En realidad, la salida de un sistema físico puede
aumentar hasta un cierto grado, pero puede estar limitada por ¨detenciones¨ mecánicas o el
sistema puede colapsarse o volverse no lineal después de que la salida excede cierta magnitud,
por lo cual ya no se aplican las ecuaciones diferenciales lineales.
Entre los comportamientos importantes del sistema (aparte de la estabilidad absoluta) que deben
recibir una cuidadosa consideración están la estabilidad relativa y el error en estado estable.
Dado que un sistema de control físico implica un almacenamiento de energía, la salida del
sistema, cuando éste está sujeto a una entrada, no sucede a la entrada de inmediato, sino que
exhibe una respuesta transitoria antes de alcanzar un estado estable. La respuesta transitoria de
un sistema de control práctico con frecuencia exhibe oscilaciones amortiguadas antes de alcanzar
un estado estable. Si la salida de un sistema en estado estable no coincide exactamente con la
entrada, se dice que el sistema tiene un error en estado estable. Este error indica la precisión del
sistema. Al analizar un sistema de control, se debe examinar el comportamiento de la respuesta
transitoria y el comportamiento en estado estable.
25
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 235
26 2.12 Definiciones de las especificaciones de respuesta transitoria
“En muchos casos prácticos, las características de desempeño deseadas del sistema de control se
especifican en términos de cantidades en el dominio del tiempo. Los sistemas que pueden
almacenar energía no responden instantáneamente y exhiben respuestas transitorias cada vez que
están sujetos a entradas o perturbaciones.”26
Con frecuencia, las características de desempeño de un sistema de control se especifican en
términos de la respuesta transitoria para una entrada escalón unitario, dado que ésta es fácil de
generar y es suficientemente drástica. (Si se conoce la respuesta a una entrada escalón, es
matemáticamente posible calcular la respuesta para cualquier entrada.)
La respuesta transitoria de un sistema para una entrada escalón unitario depende de las
condiciones iniciales. Por conveniencia al comparar respuestas transitorias de varios sistemas, es
una práctica común usar la condición inicial estándar de que el sistema está en reposo al inicio,
por lo cual la salida y todas las derivadas con respecto al tiempo son cero. De este modo, las
características de respuesta se comparan con facilidad.
“La respuesta transitoria de un sistema de control práctico exhibe con frecuencia oscilaciones
amortiguadas antes de alcanzar el estado estable. Al especificar las características de la respuesta
transitoria de un sistema de control para una entrada escalón unitario, es común especificar lo
siguiente:
1 Tiempo de retardo, td
2 Tiempo de levantamiento, tr
3 Tiempo pico, tp
4 Sobrepaso máximo, Mp
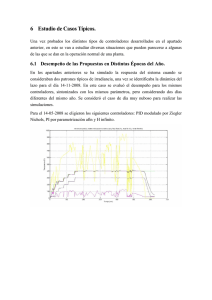
5 Tiempo de asentamiento, ts” 27
26
27
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 129
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 129
27 Estas especificaciones se definen enseguida y aparecen en forma gráfica en la figura 1.9.
1 “Tiempo de retardo, td: el tiempo de retardo es el tiempo requerido para que la respuesta
alcance en la primera vez la mitad del valor final.” 28
2 “Tiempo de levantamiento, tr: el tiempo de levantamiento es el tiempo requerido para que la
respuesta pase del 10 al 90%, del 5 al 95% o del 0 al 100% de su valor final. Para sistemas
subamortiguados de segundo orden, por lo común se usa el tiempo de levantamiento de 0 a
100%. Para sistemas sobreamortiguados, suele usarse el tiempo de levantamiento de 10 a 90%.”29
C(t) Tolerancia permisible Figura 1.9 Curva de respuesta escalón unitario en la que se muestran td, tr, tp, Mp y ts.
Fuente: Ingeniería de Control Moderna, K. Ogata.
3
“Tiempo pico, tp: el tiempo pico es el tiempo requerido para que la respuesta alcance el
primer pico del sobrepaso.” 30
28
29
30
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 150
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 150
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 150
28 4
“Sobrepaso máximo (porcentaje) Mp: el sobrepaso máximo es el valor pico máximo de la
curva de
respuesta, medido a partir de la unidad. Si el valor final en estado estable de la
respuesta es diferente de la unidad, es común usar el porcentaje de sobrepaso máximo. Se define
mediante:
Porcentaje de sobrepaso máximo =
− (∞) (∞) ∗ 100%
La cantidad de sobrepaso máximo (en porcentaje) indica de manera directa la estabilidad
relativa del sistema.” 31
5 “Tiempo de asentamiento, ts: el tiempo de asentamiento es el tiempo que se requiere para que
la curva de respuesta alcance un rango alrededor del valor final del tamaño especificado por el
porcentaje absoluto del valor final (por lo general, de 2 a 5%) y permanezca dentro de él. El
tiempo de asentamiento se relaciona con la mayor constante de tiempo del sistema de control.
Los objetivos del diseño del sistema en cuestión determinan cuál criterio de error en porcentaje
usar.” 32
C(t)
Para t > t, la respuesta 6
7
8
9
10
11
12
td
tr
tp
ts
Figura 1.11 Definición
del ángulo β. Figura 1.10 Especificaciones de la respuesta transitorio. Fuente: Ingeniería de Control Moderna, K. Ogata. 31
32
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 151
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 151
29 “Las especificaciones en el dominio del tiempo que se proporcionaron son muy importantes,
dado que casi todos los sistemas de control son sistemas en el dominio del tiempo; es decir,
deben presentar respuestas de tiempo aceptables. (Esto significa que el sistema de control debe
modificarse hasta que la respuesta transitoria sea satisfactoria.) Observe que, si especificamos los
valores de td, tr, tp, ts y Mp, la forma de la curva de respuesta queda prácticamente
determinada.” 33 Esto se aprecia con claridad en la figura 1.10.
Se observa que todas estas especificaciones no necesariamente se aplican a cualquier caso
determinado. Por ejemplo, para un sistema sobreamortiguado no se aplican los términos tiempo
pico y sobrepaso máximo. (En los sistemas que producen errores en estado estable para entradas
escalón, este error debe conservarse dentro de un nivel de porcentaje especificado).
Excepto para ciertas aplicaciones en las que no se pueden tolerar oscilaciones, es conveniente
que la respuesta transitoria sea suficientemente rápida y amortiguada. Por tanto, “para una
respuesta transitoria conveniente de un sistema de segundo orden, el factor de amortiguamiento
relativo debe estar entre 0.4 y 0.8. Valores pequeños de ζ (ζ< 0.4) producen un valor de
sobrepaso excesivo en la respuesta transitoria, y un sistema con un valor grande de ζ (ζ> 0.8)
responden con lentitud.” 34
En otras palabras, tanto el sobrepaso máximo como el tiempo de levantamiento no pueden
hacerse más pequeños en forma simultánea. Si uno de ellos se reduce, el otro necesariamente
aumenta.
33
34
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 151
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 151
30 A continuación se definen los efectos de las acciones del controlador PID sobre el desempeño
del sistema.
2.13 Controladores PID
El controlador PID, de lejos, es el algoritmo de control más común. Numerosos lazos de control
utilizan este algoritmo, que puede ser implementado de diferentes maneras: como controlador
stand-alone, como parte de un paquete de control digital directo o como parte de un sistema de
control distribuido. Su estudio puede ser abordado desde múltiples puntos de vista. Puede ser
tratado como un dispositivo que puede ser operado utilizando unas cuantas reglas prácticas, pero
también puede ser estudiado analíticamente.
“El controlador PID es un controlador realimentado cuyo propósito es hacer que el error en
estado estacionario, entre la señal de referencia y la señal de salida de la planta, sea cero de
manera asintótica en el tiempo, lo que se logra mediante el uso de la acción integral. Además el
controlador tiene la capacidad de anticipar el futuro a través de la acción derivativa que tiene un
efecto predictivo sobre la salida del proceso.”35
Los controladores PID son suficientes para resolver el problema de control de muchas
aplicaciones en la industria, particularmente cuando la dinámica del proceso lo permite (en
general procesos que pueden ser descritos por dinámicas de primer y segundo orden), y los
requerimientos de desempeño son modestos (generalmente limitados a especificaciones del
comportamiento del error en estado estacionario y una rápida respuesta a cambios en la señal de
referencia).
35
ANSTROM AND HAGGLUND, PID Controllers Theory Desing and Tunning, 2 a Ed. 1995. Pág. 30
31 “Los fabricantes proporcionan los controladores PID de variadas formas. Existen sistemas del
tipo “stand alone” con capacidad para controlar uno o varios lazos de control. Estos dispositivos
son fabricados en el orden de cientos de miles al año. El controlador PID es también un
ingrediente importante en los sistemas de control distribuido, ya que proporciona regulación a
nivel local de manera eficaz. Por otro lado, pueden también venir empotrados, como parte del
equipamiento, en sistemas de control de propósito especial, formando así parte integrante de la
aplicación.” 36
“Su uso extensivo en la industria es tal que el 95% de los lazos de control que existen en las
aplicaciones industriales son del tipo PID, de los cuales la mayoría son controladores PI, lo que
muestra la preferencia del usuario en el uso de leyes de control muy simples. En general, el
usuario no explota todas las características de estos controladores, quizás por falta de una mejor
comprensión desde el punto de vista de la teoría de control.” 37
En la actualidad, el control PID dispone de una serie de prestaciones, que en el pasado han sido
consideradas como secretos de los fabricantes. Un par de ejemplos típicos de este tipo de
prestaciones son las técnicas de conmutación de modos de control y el antiwindup del integrador.
“Los algoritmos actuales se combinan con funciones lógicas y secuenciales y una serie de
mecanismos y funciones adicionales para adecuarse a los requerimientos de los modernos
sistemas de control y automatización industrial, lo que da lugar a dispositivos especializados para
el control de temperatura, velocidad, distribución de energía, transporte, máquinas-herramientas,
reacción química, fermentación, entre otros.” 38
Los controladores PID son generalmente usados en el nivel de control más bajo, por debajo de
algunos dispositivos de mediano nivel como PLCs, supervisores, y sistemas de monitoreo. Sin
embargo, su importancia es tal que se convierte en el “pan de cada día” del ingeniero de control.
36
ANSTROM AND HAGGLUND, PID Controllers Theory Desing and Tunning, 2 a Ed. 1995. Pág. 30
ANSTROM AND HAGGLUND, PID Controllers Theory Desing and Tunning, 2 a Ed. 1995. Pág. 30
38
ANSTROM AND HAGGLUND, PID Controllers Theory Desing and Tunning, 2 a Ed. 1995. Pág. 31
37
32 “Los
controladores PID han sobrevivido a muchos cambios en la tecnología a lo largo de su
historia. Desde los antiguos reguladores de Watt, de la época de la revolución industrial, pasando
por los controladores neumáticos, los controladores analógicos eléctricos y electrónicos (primero
implementados con válvulas y luego con circuitos integrados) hasta los modernos controladores
basados en microprocesadores, que proporcionan una mayor flexibilidad debido a su
programabilidad. El microprocesador ha tenido una influencia dramática sobre el desarrollo del
controlador PID; ha permitido brindar nuevas oportunidades para implementar funciones
adicionales como el ajuste automático de parámetros y los cambios de modos de control. Para los
efectos de estos apuntes, se considera la frase “ajuste automático” en el sentido de que los
parámetros del controlador se ajustan automáticamente en base a la demanda de un operador o de
una señal externa, desactivando para ello el controlador. Esto hace que esta función sea diferente
a la función de adaptación, propias de los controladores adaptivos, que ajustan en línea (o de
manera continua) los parámetros del controlador.” 39
El desarrollo de los sistemas de control PID está también influenciado por el desarrollo en el
campo de la comunicación de datos de campos, lo que ha permitido su inserción como módulos
importantes en los esquemas de control distribuido. En este sentido, la capacidad de
comunicación de estos dispositivos con otros dispositivos de campo como PLCs y otros sistemas
de control de niveles superiores, es una función necesaria en los modernos controladores PID.
“Si bien a nivel industrial existen grupos de ingenieros de procesos e instrumentación que están
familiarizados con los controladores PID, en el sentido de que llevan una práctica continua de
instalación, puesta en marcha y operación de sistemas de control con lazos PID, también es
cierto que existe mucho desconocimiento acerca de los detalles involucrados en la construcción
de los algoritmos. Prueba de ello es que muchos controladores son puestos en modo manual y,
entre aquellos que están en el modo automático, frecuentemente la acción derivativa se encuentra
desactivada. La razón es obvia, el ajuste de los controladores es un trabajo tedioso y requiere de
cierta intuición basada en los principios de funcionamiento tanto de los procesos físicos
controlados como de la misma teoría de control. Otras razones del pobre desempeño tienen que
39
ANSTROM AND HAGGLUND, PID Controllers Theory Desing and Tunning, 2 a Ed. 1995. Pág. 150
33 ver con problemas en la instrumentación y los equipos y accesorios utilizados en el lazo de
control, como son los sensores, actuadores, dispositivos de comunicación, interfaces de
adquisición de datos, etc. Los principales problemas de los actuadores están generalmente
relacionados con fallas de dimensionamiento (en general están subdimensionados) y los
problemas de histéresis que introducen no linealidades importantes. Por su parte, los dispositivos
asociados con la medición de las señales de la planta (sensores, dispositivos de adquisición de
datos, adecuación de señales y sistemas de comunicación de datos de campo) a menudo se
encuentran mal calibrados y, es frecuente que estén dotados de mecanismos inadecuados de
filtraje pobre o bien de filtraje excesivo (producido en los llamados sensores inteligentes). Más
aún, muchos sistemas de control no cumplen con las condiciones mínimas para su operación en
tiempo real.” 40
Es así que quedan por hacer muchas mejoras sustanciales con respecto al desempeño de los
procesos industriales. Por su parte, la industria, a medida que la demanda de productos requiere
una mejor calidad, está obligada a mejorar sus lazos de control, lo que a su vez requiere un
mayor conocimiento acerca de los procesos y de sus mecanismos de regulación.
“Se puede mostrar empíricamente que el llamado “controlador PID” es una estructura útil.
Dentro de la banda proporcional el comportamiento del algoritmo PID en su versión de “libro de
texto” se puede describir como:
= [ ( )+1
0
+
( )
]
donde u es la variable de control y e es el error de control. De esta manera, la variable de control
es una suma de tres términos: el término P, que es proporcional al error; el término I, que es
proporcional a la integral del error; y el término D, que es proporcional a la derivada del error.
Los parámetros del controlador son: la ganancia proporcional K, el tiempo integral T i y el
tiempo derivativo Td.” 41
40
41
ANSTROM AND HAGGLUND, PID Controllers Theory Desing and Tunning, 2 a Ed. 1995. Pág. 156
ANSTROM AND HAGGLUND, PID Controllers Theory Desing and Tunning, 2 a Ed. 1995. Pág. 156
Acción Proporcional
34 “El controlador proporcional es esencialmente un controlador anticipativo, así mismo, este
tendrá efecto sobre el error en estado estable sólo si el error varía con respecto al tiempo, pero
tiene una gran desventaja, atenúa el ruido en frecuencias altas.”42
En el caso de un control proporcional puro, la ley de control se da en la siguiente ecuación:
=
+
“La acción de control es simplemente proporcional al error de control. La variable
es una
señal de polarización o un reset. Cuando el error de control e es cero, la variable de control toma
el valor u (t) =
. La polarización
a menudo se la fija en
+
2, pero, algunas
veces, puede ser ajustada manualmente de forma que el error de control en estado estacionario
sea cero en una referencia dada.” 43
El diseño de este tipo de controlador afecta el desempeño de un sistema de control de las
siguientes maneras:
• Mejora el amortiguamiento y reduce el sobrepaso máximo.
• Reduce el tiempo de asentamiento y levantamiento.
• Mejora el margen de ganancia, el margen de fase.
• En la implementación de un circuito, puede necesitar de un capacitor muy grande.
La parte proporcional no considera el tiempo, por tanto la mejor manera de solucionar el error
permanente y hacer que el sistema contenga alguna componente que tenga en cuenta la variación
con respecto al tiempo es incluyendo y configurando las acciones integral y derivativa.
42
WILLIAM BOLTON, Ingeniería de Control, 2ª Ed. 2006, Alfaomega. Pág. 225
43
WILLIAM BOLTON, Ingeniería de Control, 2ª Ed. 2006, Alfaomega. Pág. 225
Acción Integral
35 “La función principal de la acción integral es asegurar que la salida del proceso concuerde con la
referencia en estado estacionario. Con el controlador proporcional, normalmente existiría un
error en estado estacionario. Con la acción integral, un pequeño error positivo siempre producirá
un incremento en la señal de control y, un error negativo siempre dará una señal decreciente sin
importar cuán pequeño sea el error. ”44
“El siguiente argumento simple muestra que el error en estado estacionario siempre será cero con
la acción integral. Asuma que el sistema está en estado estacionario con una señal de control
constante 0, y un error constante 0. La señal de control está dada por:
0= ( 0+ 0
) como se tiene que 0 ≠ 0, claramente se contradice el supuesto de que la señal de control 0 se
mantiene constante. Por tanto, como resultado de esto, un controlador con acción integral
siempre dará un error en estado estacionario cero.” 45
Debido a que al incorporar un polo en lazo abierto en el origen, se desplaza el lugar geométrico
de las raíces del sistema hacia el semiplano derecho de s. Por esta razón, en la práctica la acción
integral suele acompañarse por otras acciones de control.
Acción Derivativa
“El propósito de la acción derivativa es mejorar la estabilidad de lazo cerrado, mantener el error
al mínimo corrigiéndolo proporcionalmente con la velocidad misma que se produce, de esta
manera evita que el error se incremente.”46
44
WILLIAM BOLTON, Ingeniería de Control, 2ª Ed. 2006, Alfaomega. Pág. 235
45
WILLIAM BOLTON, Ingeniería de Control, 2ª Ed. 2006, Alfaomega. Pág. 235
46
WILLIAM BOLTON, Ingeniería de Control, 2ª Ed. 2006, Alfaomega. Pág. 236
“El mecanismo de inestabilidad puede ser descrito intuitivamente como sigue. Debido a la
dinámica del proceso, pasa algún tiempo antes de que la variable de control se note en la salida
36 del proceso. De esta manera, el sistema de control tarda en corregir el error. La acción de un
controlador con acción proporcional y derivativa puede ser interpretada como si el control
proporcional fuese hecho para predecir la salida del proceso. La predicción se hace por la
extrapolación del error de control en la dirección de la tangente a su curva respectiva.”47
“La estructura básica de un controlador PD está dada por:
( )= [ ( )+
( )
]
De esta manera, la señal de control es proporcional a un estimado del error de control en un
tiempo Td hacia adelante, donde el estimado se obtiene mediante extrapolación lineal.” 48
2.14 Controladores de error cuadrático
“En la forma estándar del control PID, el error de control ingresa linealmente en el algoritmo.
Algunas veces es deseable tener ganancias altas en el controlador, sobre todo cuando el error de
control es grande. Otras veces se requiere pequeñas ganancias, cuando el error de control es
pequeño. Una forma común de obtener esta propiedad es usar el cuadrado del error de control, es
decir, el error de control sustituido por:
= | |
El error cuadrático es más comúnmente usado sólo en el término proporcional, algunas veces en
el término integral, pero raras veces en el término derivativo.” 49
47
WILLIAM BOLTON, Ingeniería de Control, Segunda Ed. 2006, Alfaomega. Pág. 232 WILLIAM BOLTON, Ingeniería de Control, Segunda Ed. 2006, Alfaomega. Pág 234
49
ANSTROM AND HAGGLUND, PID Controllers Theory Desing and Tunning, 2 a Ed. 1995. Pág. 160
48
“Una razón para el uso de controladores de error cuadrático es la capacidad para reducirlos
efectos de las perturbaciones de baja frecuencia en la señal de medición. Estas perturbaciones no
pueden ser filtradas, pero con el uso del control cuadrático se da una amplificación muy pequeña
37 del ruido, cuando el error de control es pequeño y un control más efectivo, en cuanto a velocidad
de respuesta, cuando el error de control es grande.” 50
2.15 Salidas especiales del controlador
“Las entradas y salidas de un controlador son normalmente señales analógicas, típicamente de 020 mA o de 4-20 mA. La razón principal para el uso de 4 mA en vez de 0 mA, como límite
inferior, es que muchos transmisores están diseñados para su conexión con dos hilos. Esto
significa que el mismo hilo es usado tanto para manejar el sensor como para transmitir la
información desde el sensor hasta el controlador. En este caso, no sería posible manejar el sensor
con una corriente de 0 mA. Por otra parte, la razón principal del uso de corriente en vez de
voltaje es evitar la influencia de las caídas de voltaje, debidas a la resistencia a lo largo del
recorrido del hilo (tal vez muy largo).” 51 2.16 Windup del integrador
“Aunque muchos de los aspectos de un sistema de control se pueden entender a partir de la teoría
de control lineal, algunos efectos no lineales deben ser tomados en cuenta a la hora de
implementar un controlador. Todos los actuadores tienen limitaciones: un motor tiene limitada su
velocidad, una válvula no puede abrirse más de “completamente abierta” y no puede cerrarse
más de “complemente cerrada”, la fuente de alimentación de energía de un dispositivo eléctrico
es finita, etc. Para un sistema de control con un amplio rango de condiciones de operación, puede
suceder que la variable de control alcance los límites prefijados del actuador. Cuando esto pasa,
el lazo realimentado permanece en su límite independientemente de la salida del proceso. Si se
usa un controlador con acción integral, el error continuará siendo integrado, incrementando aún
50
51
ANSTROM AND HAGGLUND, PID Controllers Theory Desing and Tunning, 2 a Ed. 1995. Pág. 160
ANSTROM AND HAGGLUND, PID Controllers Theory Desing and Tunning, 2 a Ed. 1995. Pág. 160
más su valor. Esto significa que el término integral puede volverse muy grande o,
coloquialmente, hacer “windup”. Entonces, se requiere que el error tenga el signo opuesto por un
periodo de tiempo suficientemente largo, antes de que las cosas regresen a las condiciones
38 normales de operación. La consecuencia es que cualquier controlador con acción integral puede
dar transitorios grandes cuando el actuador se satura.” 52
El windup del integrador puede ocurrir en conexión con cambios grandes en la referencia o
puede ser causado por perturbaciones o malfuncionamiento del equipamiento del sistema de
control. El windup también puede ocurrir cuando se usan selectores de varios controladores que
manejan un actuador. Un caso digno de mencionar es el control encascada, donde el windup
puede ocurrir en el controlador primario cuando el controlador secundario se conmuta a modo
manual, usa su referencia local, o si su señal de control se satura.
“El fenómeno de windup era bien conocido por los fabricantes de controladores analógicos
quienes inventaron numerosos trucos para evitarlo. Estos fueron descritos bajo etiquetas como
“preloading”, “batchunit”, etc. Aunque el problema fue comprendido, existieron limitaciones
para resolverlo, debido a las implementaciones de naturaleza analógica. Las ideas, a menudo, se
mantuvieron en secreto y no se hablaron mucho de ellas.”
53
El problema del windup fue
redescubierto cuando los controladores fueron implementados en forma digital y numerosos
métodos para evitarlo fueron presentados en la literatura como los que se citan a continuación.
Limitaciones de la referencia
Una forma de evitar el windup del integrador es introducir limitadores en las variaciones de la
referencia tal que la salida del controlador nunca alcance los límites del actuador. Esto, a
menudo, produce cotas conservativas y límites en el funcionamiento del controlador. Más aún,
no evita el windup causado por las perturbaciones.
52
ANSTROM AND HAGGLUND, PID Controllers Theory Desing and Tunning, 2 a Ed. 1995. Pág. 168
53
ANSTROM AND HAGGLUND, PID Controllers Theory Desing and Tunning, 2 a Ed. 1995. Pág. 169
Algoritmos incrementales
39 “En la primera época del control realimentado, la acción integral fue integrada con el actuador,
teniendo un motor manejando directamente una válvula de control. En este caso, el windup fue
manejado automáticamente, debido a que la integración para cuando la válvula de control para.
Cuando los controladores fueron implementados mediante técnicas analógicas, y más tarde con
computadoras, muchos fabricantes usaron una configuración análoga al viejo diseño mecánico,
esto condujo a los llamados algoritmos de velocidad. En este algoritmo, primero se calcula la
tasa de cambio de la señal de control y luego se la alimenta a un integrador. En algunos casos
este integrador es directamente un motor conectado al actuador. En otros casos el integrador es
implementado internamente en el controlador. Con este método es fácil manejar los cambios de
modo de control y el windup. A su vez, el windup se evita inhibiendo la integración cuando se
satura la salida. Este método es equivalente al del cálculo, que se describe a continuación. Si la
salida no es medible, se puede usar un modelo que calcula la salida saturada. Es también fácil
limitar la tasa de cambio de la señal de control.” 54
Recalculo y seguimiento
“El recalculo trabaja como sigue: cuando la salida se satura, la integral es recalculada tal que su
nuevo valor proporciona una salida en el límite de la saturación. Tiene la ventaja de no
reinicializar el integrador instantáneamente, pero sí dinámicamente con una constante de tiempo
Ti.” 55
2.17 Reglas de sintonización para controladores PID
Si se puede obtener un modelo matemático de la planta, es posible aplicar diversas técnicas de
diseño con el fin de determinar los parámetros del controlador que cumpla las especificaciones
en estado transitorio y en estado estable del sistema en lazo cerrado. Sin embargo, si la planta es
54
55
ANSTROM AND HAGGLUND, PID Controllers: Theory, Desing and Tunning, 2 a Ed. ISA, 1995. Pág. 171
ANSTROM AND HAGGLUND, PID Controllers: Theory, Desing and Tunning, 2 a Ed. ISA, 1995. Pág. 171
40 tan complicada que no es fácil obtener su modelo matemático, tampoco es posible un enfoque
analítico para el diseño de un controlador PID. En este caso, se debe recurrir a los enfoques
experimentales para la sintonización de los controladores PID.
“El proceso de seleccionar los parámetros del controlador que cumplan con las especificaciones
de desempeño se conoce como sintonización del controlador. Ziegler y Nichols sugirieron más
reglas para sintonizar los controladores PID (lo cual significa establecer valores de Kp, Ti y Td)
con base en las respuestas escalón experimentales o basadas en el valor de Kp que se produce en
la estabilidad marginal cuando sólo se usa la acción de control proporcional.”56
Las reglas de Ziegler-Nichols, son muy convenientes cuando no se conocen los modelos
matemáticos de las plantas. (Por supuesto, estas reglas se aplican al diseño de sistemas con
modelos matemáticos conocidos).
2.17.1 Reglas de Ziegler-Nichols para sintonizar controladores PID
“Ziegler y Nichols propusieron unas reglas para determinar los valores de la ganancia
proporcional Kp, del tiempo integral Ti y del tiempo derivativo Td, con base en las
características de respuesta transitoria de una planta específica. Tal determinación de los
parámetros de los controladores PID o de la sintonización de los controles PID la realizan los
ingenieros en el sitio mediante experimentos sobre la planta.” 57
Existen dos métodos denominados reglas de sintonización de Ziegler-Nichols. En ambos se
pretende obtener un 25% de sobrepaso máximo en la respuesta escalón.
56
57
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 670
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 671
41 Primer método:
“En el primer método, la respuesta de la planta a una entrada escalón unitario se obtiene de
manera experimental. Si la planta no contiene integradores ni polos dominantes complejos
conjugados, la curva de respuesta escalón unitario puede tener forma de S (Si la respuesta no
exhibe una curva con forma de S, este método no es pertinente.) Tales curvas de respuesta
escalón se generan experimentalmente o a partir de una simulación dinámica de la planta. ”58
Figura 2.1 Método de Ziegler y Nichols.
Fuente: Ingeniería de Control Moderna, K. Ogata.
“La curva con forma de S se caracteriza por dos parámetros: el tiempo de retardo L y la constante
de tiempo T. El tiempo de retardo y la constante de tiempo se determinan dibujando una recta
tangente en el punto de inflexión de la curva con forma de S y determinando las intersecciones
de esta tangente con el eje del tiempo y la línea C(t) = K.” 59
Ziegler y Nichols sugirieron establecer los valores de Kp, Ti y Td de acuerdo con la fórmula que
aparece en la siguiente tabla:
58
59
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 671
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 673
42 Tipo de controlador
Kp
Ti
Td
P
T/L
∞
0
PI
0.9T/L
L/0.3
0
PID
1.2T/L
2L
0.5L
Segundo método:
“En el segundo método, primero se establece Ti = cte y Td= 0. Usando sólo la acción de control
proporcional, se incrementa Kp de cero a un valor crítico Kc en donde la salida exhiba primero
oscilaciones sostenidas. (Si la salida no presenta oscilaciones sostenidas para cualquier valor que
pueda tomar Kp, no se aplica este método). Por tanto, la ganancia crítica Kc y el periodo Pc
correspondiente se determinan experimentalmente.”60
Figura 2.2 Segundo método de Ziegler-Nichols.
Fuente: Ingeniería de Control Moderna, K. Ogata.
60
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 672 43 Ziegler-Nichols sugirieron que se establecieran los valores de los parámetros Kp, Ti y Td de
acuerdo con la fórmula que aparece en la siguiente tabla:
Tipo de controlador
Kp
Ti
Td
P
0.5Kcr
∞
0
PI
0.45Kcr
Pcr/1.2
0
PID
0.6Kcr
0.5Pcr
0.125Pcr
“Las reglas de sintonización de Ziegler-Nichols se han usado ampliamente para sintonizar
controladores PID en los sistemas de control de procesos en los que no se conoce con precisión
la dinámica de la planta. Tales reglas de sintonización han demostrado ser muy útiles durante
muchos años. Por supuesto, las reglas de sintonización de Ziegler-Nichols se aplican a las plantas
cuya dinámica se conoce. (En estos casos, se cuenta con muchos enfoques analíticos y gráficos
para el diseño de controladores PID, además de las reglas de sintonización de ZieglerNichols).”61
“Si se conoce la función de transferencia de la planta, se calcula la respuesta escalón unitario o la
ganancia crítica Kc y el periodo crítico Pc. A continuación, empleando los valores calculados, es
posible determinar los parámetros Kp, Ti y Td. Sin embargo, la utilidad real de las reglas de
sintonización de Ziegler-Nichol se vuelve evidente cuando no se conoce la dinámica de la planta,
por lo que no se cuenta con enfoques analíticos o gráficos para el diseño de controladores.” 62
En general, para aquellas plantas con una dinámica complicada y sin integradores, se han
aplicado las reglas de sintonización de Ziegler-Nichols. Sin embargo, si la planta tiene un
integrador, en algunos casos estas reglas no son pertinentes.
61
62
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 673
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 673
44 2.17.2 Método de asignación de polos
“Este método está basado en el conocimiento de la función de transferencia del proceso en
estudio. Dicho método simplemente intenta encontrar un controlador que proporcione en lazo
cerrado polos deseados para obtener determinadas especificaciones.” 63
El método de asignación de polos se realiza de la siguiente manera: primeramente se obtiene el
polinomio característico con los polos deseados en lazo cerrado del controlador y del proceso en
estudio, el cual queda en función de los parámetros del controlador (PID). Luego se calcula un
segundo polinomio con los polos deseados en lazo cerrado para que el proceso cumpla
determinadas especificaciones.
“En este punto se debe tener presente lo siguiente: debido a que la mayoría de los sistemas de
control que se encuentran en la práctica son de órdenes mayores que 2, es útil establecer guías en
la aproximación de sistemas de mayor orden mediante órdenes menores, siempre y cuando sea
referente a la respuesta transitoria. En el diseño se pueden usar los polos dominantes para
controlar el desempeño dinámico del sistema, mientras que los polos insignificantes se utilizan
con el fin de asegurar que la función de transferencia del controlador pueda realizarse a través de
componentes físicos.” 64
“En la práctica y en la literatura se ha reconocido que si la magnitud de la parte real de un polo
es de por lo menos 5 a 10 veces mayor que el polo dominante de un par de polos complejos
dominantes, el polo puede denotarse en cuanto a la respuesta transitoria se refiere.” 65
“Tomando en cuenta lo expuesto anteriormente se adicionarán a los polos de la dinámica
dominante tantos polos insignificantes como sea necesario para obtener el mismo orden de la
ecuación característica de la ecuación de transferencia del sistema de control.” 66
63
BENJAMÍN C. KUO, Sistemas de Control Automático, 7ª Ed. 1996, Prentice Hall. Pág. 417
BENJAMÍN C. KUO, Sistemas de Control Automático, 7ª Ed. 1996, Prentice Hall. Pág. 417
65
BENJAMÍN C. KUO, Sistemas de Control Automático, 7ª Ed. 1996, Prentice Hall. Pág. 417
66
BENJAMÍN C. KUO, Sistemas de Control Automático, 7ª Ed. 1996, Prentice Hall. Pág. 418
64
45 Luego de obtenidos ambos polinomios o ecuaciones se procede a igualar los coeficientes de las
dos ecuaciones características, para determinar así cada uno de los parámetros del controlador
que se esté aplicando.
2.18 Modificaciones de los esquemas de control PID
“En el sistema de control PID básico, si la entrada de referencia es una función escalón, debido a
la presencia del término derivativo en la acción de control, la variable manipulada contendrá una
función impulso (una función delta). En un controlador PID real, en lugar del término derivativo
puro Tds empleamos:
1+£
donde el valor de £ está en algún punto alrededor de 0.1. Por tanto, cuando la entrada de
referencia es una función escalón, la variable manipulada no contendrá una función impulso,
sino que implicará una función de pulso aguda. Tal fenómeno se denomina reacción del punto de
ajuste.” 67
“Para evitar el fenómeno de la reacción del punto de ajuste, se pretende operar la acción
derivativa sólo en la trayectoria de realimentación, a fin de que la diferenciación ocurra
únicamente en la señal de realimentación y no en la señal de referencia. El esquema de control
ordenado de esta forma se denomina control PI-D.” 68
67
68
ANSTROM AND HAGGLUND, PID Controllers: Theory, Desing and Tunning, 2 a Ed. ISA, 1995. Pág. 214
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 674
Control I-PD
46 “Tanto el control PID como el control PI-D implican una función escalón en la seña1
manipulada. En muchas ocasiones, tal cambio escalón en la señal manipulada tal vez no sea
conveniente. Por tanto, puede convenir mover la acción proporcional y la acción derivativa a la
trayectoria de realimentación, a fin de que estas acciones solo afecten la seña1 de realimentación.
Tal esquema de control, se denomina control I-PD.” 69
2.19 Control PID con mmás de un grado de libertad.
Los grados de libertad del sistema de control se refieren al número de funciones de transferencia
en lazo cerrado que son independientes.
Figura 2.3 Control con dos grados de libertad.
Fuente: Ingeniería de Control Moderna, K. Ogata.
69
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Prentice Hall. Pág. 678
47 Figura 2.4 Control con dos grados de libertad.
Fuente: Ingeniería de Control Moderna, K. Ogata.
“Se ha mostrado que el control PI-D se obtiene moviendo la acción de control derivativa a la
trayectoria de realimentación y que el control I-PD se obtiene moviendo las acciones de control
proporcional y la derivativa a la trayectoria de realimentación. En lugar de mover la acción de
control derivativa completa o la acción de control proporcional a la trayectoria de
realimentación, es posible mover solo partes de estas acciones de control a la trayectoria de
realimentación, conservando las partes restantes en la trayectoria directa. En la literatura se ha
propuesto un control PI-PD, cuyas características se encuentran entre el control PID y el control
I-PD. Asimismo, se puede considerar un control PID-PD. En estos esquemas de control tenemos
un controlador en la trayectoria directa y otro en la trayectoria de realimentación. Tales
esquemas de control nos conducen a un esquema de control más general con dos grados de
libertad.” 70
¿Cuándo se puede usar el controlador PID?
Los requerimientos de un sistema de control pueden incluir muchos factores, tales como la
respuesta a las señales de comando, la insensibilidad al ruido de medición y a las variaciones en
el proceso y el rechazo a las perturbaciones de carga. El diseño de un sistema de control también
involucra aspectos de la dinámica del proceso, del actuador, de la saturación y de las
características de la perturbación. Parece sorprendente que un controlador tan simple como el
PID pueda trabajar tan bien. La observación empírica general es que la mayoría de los procesos
pueden ser controlados razonablemente con control PID, ya que la demanda de desempeño del
70
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4a Ed. 2003, Edit. Prentice Hall. Pág. 683
48 control en muchos procesos industriales no es muy sofisticada. En lo que sigue se explora aún
más este aspecto, primero considerando casos donde el control PID es suficiente y luego
discutiendo un par de problemas genéricos donde los controladores más sofisticados son
aconsejables.
¿Cuándo un control PI es suficiente?
Frecuentemente, la acción derivativa no es usada. Es interesante observar que muchos
controladores industriales sólo tienen la acción PI y que en otros, la acción derivativa puede ser
puesta a off, como frecuentemente lo es.
Se puede mostrar que un control PI es adecuado para procesos donde la dinámica del sistema es
esencialmente de primer orden (control de nivel de un solo tanque, tanques de mezclado,
reactores perfectamente agitados, etc.). Es fácil comprobar esto, si fuese el caso, midiendo la
respuesta al escalón o la respuesta en frecuencia del proceso. Si la respuesta al escalón se parece
a la de un sistema de primer orden, o más precisamente, si la curva de Nyquist se sitúa sólo en el
primero y cuarto cuadrante, entonces el control PI es suficiente. Otra razón es que el proceso ha
sido diseñado tal que su operación no requiere un control fino. Entonces, aún si el proceso tiene
dinámica de alto orden, lo que se requiere es una acción integral que lleve a cero el error en
estado estacionario y una adecuada respuesta transitoria proporcionada por una acción
proporcional.
¿Cuándo un control PID es suficiente?
Similarmente, el control PID es suficiente para procesos donde la dinámica dominante es de
segundo orden. Para estos procesos no existe mayor beneficio con el uso de un controlador más
sofisticado.
Un caso típico de la acción derivativa, introducida para mejorar la respuesta, es cuando la
dinámica del proceso está caracterizada por constantes de tiempo que difieren en magnitud. La
acción derivativa puede dar buenos resultados para aumentar la velocidad de respuesta. El
control de temperatura es un caso típico. La acción derivativa es también beneficiosa cuando se
requiere un control más fino para un sistema de alto orden. La dinámica de alto orden limitaría la
49 cantidad de ganancia proporcional para un buen control. Con la acción derivativa, se mejora el
amortiguamiento ya que se puede utilizar una ganancia proporcional más alta y elevar la
velocidad de la respuesta transitoria.
A continuación se define los bloques eléctricos de las cuales se obtiene el modelado matemático
de la planta RLC.
2.20 Bloques funcionales de un sistema eléctrico
Los bloques funcionales básicos de sistemas eléctricos pasivos son inductores, capacitores y
resistores. “Para un inductor, la diferencia de potencial v, a través de éste en cualquier instante
depende de la tasa de cambio de la corriente (di/dt) que fluye por él.
V=L
donde L es la inductancia. La dirección de la diferencia de potencial es la opuesta a la dirección
de la diferencia de potencial empleada para hacer fluir corriente por el inductor, por lo tanto se
denomina fuerza contra electromotriz.”71
La ecuación se puede rescribir para obtener
i = 1
“Para un capacitor, la diferencia de potencial a través de éste depende del cambio de carga q,
entre las placas del capacitor en el instante considerado.” 72
71
72
WILLIAM BOLTON, Ingeniería de Control, Segunda Edición, 2006, Alfaomega. Pág. 45
WILLIAM BOLTON, Ingeniería de Control, Segunda Edición, 2006, Alfaomega. Pág. 46
50 V=
donde C es la capacitancia. Puesto que la corriente i, hacia el capacitor o desde éste es la tasa a la
cual se mueve la carga hacia las placas del capacitor o desde éstas, es decir,
i=
entonces la carga total q, entre las placas del capacitor está dada por
q = y así, la ecuación (V = q / C) se puede rescribir como
v = 1
De modo, puesto que V = q / C, entonces
= 1
y así, debido a que i = dq / dt, entonces
i=C
Para un resistor, la diferencia de potencial v, a través de éste en cualquier instante depende de la
corriente i, que fluye por él.
V=Ri
donde R es la resistencia.
Tanto el inductor como el capacitor almacenan energía, la cual puede liberarse después. Un
resistor no almacena energía, solo puede disiparla. La energía que almacena un inductor cuando
hay una corriente i es
E = 12
2
La energía que almacena un capacitor cuando hay una diferencia de potencial v, a través de éste
es
51 E = 12
2
La potencia P, que disipa un resistor cuando hay una diferencia de potencial v, a través de éste es
P = 12 2 Las ecuaciones que describen cómo se pueden combinar los bloques funcionales eléctricos son
las leyes de Kirchhoff, las cuales se pueden expresar como:
a) “Ley 1. La corriente total que fluye hacia una unión es igual a la corriente total que fluye
desde una unión, es decir, la suma algebraica de las corrientes en la unión es cero.”73
b) “Ley 2. En un circuito cerrado o malla, la suma algebraica de las diferencias de potencial a
través de cada parte del circuito es igual a la fuerza electromotriz (f.e.m) aplicada.”74
“Una forma conveniente de utilizar la ley 1 es el llamado análisis de nodos, puesto que la ley se
aplica a cada uno de los nodos principales de un circuito; un nodo es un punto de unión o
conexión entre bloques funcionales o elementos del circuito y un nodo principal es aquel en el
que se encuentran tres o más ramas del circuito. Un modo conveniente de utilizar la ley 2 es el
llamado análisis de mallas, dado que la ley se aplica a cada una de las mallas; una malla es una
trayectoria cerrada que no contiene ninguna trayectoria cerrada.” 75
73
ROBERT BOYLESTAD, Teoría de Circuitos, 6ª Ed. Printice Hall. Pág. 112
ROBERT BOYLESTAD, Teoría de Circuitos, 6ª Ed. Printice Hall. Pág. 112
75
WILLIAM BOLTON, Ingeniería de Control, 2ª Ed. 2006, Alfaomega. Pág. 48
74
52 3 Marco Metodológico
3.1 Tipo de investigación
53 Por su finalidad es una investigación aplicada, puesto que se utiliza conocimientos de la
electrónica y de control para aplicarlos a los circuitos de control.
Teniendo en cuenta sus objetivos es descriptiva ya que buscará mostrar los procedimientos a
seguir en el cálculo de los parámetros del controlador.
3.2 Área de estudio
El trabajo será montado en un prototipo en el Laboratorio de Electrónica de Facultad de Ciencias
y Tecnología, para que con la ayuda de otros instrumentos como el generador de señales, fuente
de alimentación y osciloscopio se pueda visualizar un sistema de control ral.
3.3 Fuente de información
Para la recolección de la información primaria se recurre al estudio de campo, se observa
directamente el comportamiento del circuito de control a fin de comprender su funcionamiento.
Para la recolección de las fuentes secundarias se recurre a los libros de textos, páginas webs,
revistas científicas.
Para los cálculos y las simulaciones se recurre al programa informático MatLab 7.10 y su
herramienta Sisotool.
3.5 Métodos, técnicas, instrumentos y procedimientos
Cálculo manual de la función de transferencia del controlador PID basado en el circuito
con amplificadores operacionales.
Simulación mediante los programas informáticos Matlab y Proteus.
54
Para prueba del circuito, se monta el sistema sobre protoboard, con la ayuda de los
instrumentos:
-
Osciloscopio
-
Téster
-
Generador de señales
-
Fuente de alimentación
Para corroborar el funcionamiento del sistema, se varían los parámetros del compensador
y se utilizan los siguientes tipos de señales: rampa, diente de sierra, escalón, senoidal.
Para verificar el funcionamiento de los componentes reales, se monta el prototipo sobre
placa perforada.
Para la construcción de las placas, se crea un diseño gráfico del circuito (PCB) con el
programa Proteus.
3.6 Circuito RLC o Planta
Como se puede ver el sistema es una planta de segundo orden con dos resistencias, un inductor y
un capacitor que almacenan energía.
55 L1 R1 e i
R2 e C
1 o Figura 3.1 La planta. Fuente: Elaboración propia.
Aplicando las leyes de Kirchhoff se tiene:
•
① eᵢ− 2 1 = 2−eₒ
eₒ
+ 2 2 => eᵢ 1 =
2
( 1
1 + 1 2 + 1
) - ② 2−eₒ
= eₒ
=> 2
= eₒ( 1
)
+ 1
Se despeja ( 2):
2 = eₒ (1+ XL
)
Introduciendo la ecuación ② en la ecuación ①
•
eᵢ 1 = eₒ (1+ XL
=>
) ( 1
1 + 1 2 + 1
eᵢ 1 = eₒ ( 1 1 + 1 2 + 1
)
- eₒ
+ X L 2∗ + XL 1∗ + 1
) - eₒ
(
eᵢ = eₒ 1 1 1 + 1 2 + X L 2∗ + XL 1∗ + 1
)
56 (
=> eₒ eᵢ = 1 1 1∗ XC+ 2∗ XC+XL∗ 1+XL∗ 2+ 1∗ 2 1∗ 2∗ •
)
Si se toma la transformada de Laplace de esta ecuación resulta:
Eₒ(S) Eᵢ(S) = 2
1
Eₒ(S) Eᵢ(S) = 2
+ 2
+ 1∗ L∗ S + 2∗ L∗ S + 1∗ 2 1+ 2+ 1∗ L∗ C∗ S2+ 2∗ L∗ C ∗ S2+ 1∗ 2∗ C∗ S
•
Entonces la función de transferencia de la planta es:
G(s) = ₒ( ) ᵢ( ) =
∗ +
+ ∗
∗ ∗ + ( +
)
3.7 Las etapas del controlador PID con amplificadores operacionales
En la figura 3.2 se puede observar el circuito equivalente del controlador PID, con cada una de
sus etapas: proporcional (P), integral (I), y derivativo (D).
57 Figura 3.2 Las etapas del controlador PID.
Fuente: Sistema de Control Automático, B. Kuo.
Para este análisis se parte de los principios del amplificador operacional ideal cuyas
características se citan a continuación:
1. El voltaje entre las terminales es cero; esto es, e⁺ = e⁻. Esta propiedad se conoce
comúnmente como tierra virtual o corto virtual.
2. Las corriente entre las terminales + y – son cero. Por tanto la impedancia de entrada es
infinita.
3.
La impedancia vista hacia la terminal de salida es cero. Por tanto, la salida es una fuente de
voltaje ideal.
4.
La relación entrada-salida es e˳= A (e⁺ - e⁻), donde la ganancia A tiende a infinito.
58 Parte proporcional (P)
Con el control proporcional la salida del controlador es directamente proporcional a su entrada;
la entrada es la señal de error, la cual es una función de tiempo.
La salida del controlador depende sólo de la magnitud del error en el instante en el que se
considera.
El controlador proporcional es, en efecto, sólo un amplificador con una ganancia constante. En
cierto tiempo, un error grande produce una salida grande.
Rd V i Rc V0 1 Figura 3.3 Parte proporcional.
Fuente: Ingeniería de Control Moderna, K. Ogata.
−0
=−
= 0−
1
=−
1
1
=−
④
1( )
( )
Parte integral (I)
El controlador integral es un circuito electrónico que genera una salida proporcional a la señal de
entrada. La figura (3.4) muestra el circuito de un controlador integral, el capacitor C está
conectado entre la entrada inversora y la salida. De esta forma, la tensión en las terminales del
capacitor es además la tensión de salida.
59 Cc V Rf i V0 2 Figura 3.4 Parte integral.
Fuente: Ingeniería de Control Moderna, K. Ogata. −0 = 0− 02
02( ) = ( )
= −
02
( )
= -­‐Cc
02( ) ⑤ Parte derivativa (D)
La acción de control derivativa responde a la velocidad del cambio del error y produce una
corrección significativa antes de que la magnitud del error se vuelva demasiado grande y además
tiende a aumentar la estabilidad del sistema. Rh V Rg i Cd V0 3 Figura
3.5 Parte derivativa.
Fuente: Ingeniería de Control Moderna, K. Ogata.
−0(
− ℎ
+
+
) = 0− 03 ℎ +
= − 03 ℎ 03 = 60 03( ) = − ℎ
− ℎ
( )
+1
⑥ 03( ) = ( ) 1+
3.8 Función de transferencia del controlador
En base a los valores obtenidos en cada etapa se halla
, el cual va a ser la función de
transferencia del controlador PID análogo, C(S)
1( ) − 0 + 2( ) − 0 + 3 − 0 = 0 − 1( ) 1( ) +
2( ) +
3 = -
Reemplazando la ecuación 4, 5 y 6 en la 7:
−
( ) -­‐ -­‐ − ℎ
( ) ( ) 1+
= -­‐ (s) = (
(s) = )(1+ + ℎ
+ 1
1+ 1+ ) + + ℎ
1+ (
)(
) (s) = ℎ ℎ
² +
(1+ ²+ +
+ ) (s) = +
( + 1
+ ) ℎ ℎ
²+
+ 61 ℎ ℎ
(s) = ² + + + + ) ( + 1
1
(s) = ) + ℎ
² + + 1
+ 1
( + + 1
+ 1
( + ⑧ ( ) = 1
+ ℎ
² + ) 3.9 Cálculo de los parámetros del controlador mediante MatLab y la Sisotool
Con el programa MatLab y una herramienta llamada Sisotool, se procede al cálculo de los
parámetros del controlador y la simulación del sistema.
Primeramente se carga los datos de la planta (circuito RLC), cuyos valores fueron seleccionados
arbitrariamente y se realiza la simulación en lazo abierto sin el compensador, ejecutando el
programa que sigue:
%%%%%
%%%%
%%%%
Función de transferencia de la planta
%%%%%
G(s) = R2/ [(R1+R2) LCS^2+CR1R2S+ (R1+R2)]
Componentes de la planta
%%%%
%%%%
R1=100
R2=10000
L=37e-6
C=1e-6
62 %%%%
Lazo abierto
%%%%
%%%
Numerador de la planta
%%%%
n=R2
%%%
Denominador de la planta
%%%
da=[(R1+R2)*L*C,C*R2*R1,+(R2+R1)]
%%%
Función de transferencia de la planta
%%%
Pl=tf(n,da)
Se grafica el lugar de las raíces, la respuesta a la entrada escalón de la planta en lazo abierto con
los siguientes comandos:
%%
Lugar de las raíces
figure(1)
rlocus(n,da)
Figura 3.6 Lugar de las raíces en lazo abierto.
Fuente: Elaboración propia.
63 %%
Respuesta al escalón
figure(2)
step(n,da)
Figura 3.7 Respuesta al escalón en lazo abierto.
Fuente: Elaboración propia.
La gráfica del sistema en lazo cerrado con realimentación unitaria y sin compensar (figura 3.8),
se presenta a continuación:
%%%%
%%%
Lazo cerrado
%%%%
Función de transferencia en lazo cerrado con realimentación
unitaria G(s)= R2/[(R1+R2)LCS^2+CR1R2S+(R1+2R2)] %%%%
%%Denominador de la planta
d=[(R1+R2)*L*C,C*R2*R1,(R1+2*R2)]
64 %%
Lugar de las raíces
figure(5)
rlocus(n,d)
Figura 3.8 Lugar de las raíces en lazo cerrado sin el compensador.
Fuente: Elaboración propia.
%%
Respuesta al escalón
figure(6)
step(n,d)
65 Figura 3.9 Repuesta al escalón en lazo cerrado sin compensar.
Fuente: Elaboración propia.
%%
Respuesta al impulso
figure(7)
impulse(n,d)
66 Figura 3.10 Repuesta al impulso en lazo cerrado sin el compensador.
Fuente: Elaboración propia.
%%
Respuesta a rampa
drc=[(R1+R2)*L*C,C*R2*R1,(R1+2*R2),0]
figure(8)
step(n,drc)
67 Figura 3.11 Repuesta a la rampa en lazo cerrado sin compensar.
Fuente: Elaboración propia.
Por los resultados obtenidos se observa que el sistema es muy inestable y que precisa de un
compensador. Para el cálculo de los parámetros del compensador, se procede a hacer uso de la
toolbox de MatLab Sisotool.
3.10 Implementación de la Sisotool de MatLab.
Para ingresar a la Sisotool de Matlab se ejecuta el comando Sisotool en la ventana de comandos,
después de esto se observa una ventana. Ver la figura 3.12.
68 Figura 3.12 Ventana Inicial de la herramienta SISO Design Tool.
Fuente: Elaboración propia.
Ubicados en la ventana de la Sisotool, se dirige el cursor a la pestaña File - Import en donde se
puede seleccionar de un menú, la función de transferencia del circuito RLC o planta que se ha
creado en Matlab, se selecciona y luego se lo asigna a plant, según la figura 3.13. Por último se
da click en OK.
69 Figura 3.13 Ventana de importación de datos del sistema.
Fuente: Elaboración propia.
Para ver el comportamiento del sistema ante una entrada escalón, rampa, impulso y las gráficas
de Bode, Nyquist o el lugar de las raíces se selecciona la pestaña Analysis Plots de la ventana
principal de la Sisotool. Figura. 3.14.
Figura 3.14 Ventana de selección del tipo de repuesta.
Fuente: Elaboración propia.
70 Pero como estas características ya se obtuvieron en el programa de comandos de MatLab, se
utiliza la Sisotool exclusivamente para calcular los parámetros del controlador PID cuya función
de transferencia es:
( ) = ) + ² + + + ( + Para hallar estos parámetros se parte de la condición de que la respuesta del sistema en lazo
cerrado ante una entrada tipo escalón, tenga un sobrepaso máximo Mp (overshoot) de 20% y un
tiempo de asentamiento Ts de 0,1 mili segundos.
A continuación se procede a asignar el tiempo de establecimiento y el porcentaje de overshoot
que se planteó anteriormente. Esto se logra haciendo un click con el botón derecho del mouse
sobre la región del lugar de las raíces y siguiendo la secuencia Desing Constraints - New. Esto
se puede observar en la figura 3.15.
71 Figura 3.15 Asignación del overshoot y el setting time.
Fuente: Elaboración propia.
Se selecciona en el menú desplegable el Setting time que es el tiempo de establecimiento y se
procede a asignarlo, por ultimo damos click en OK.
Figura 3.16 Tiempo de establecimiento (Ts).
Fuente: Elaboración propia.
72 Para asignar el overshoot, se repite los dos pasos anteriores, pero esta vez se selecciona en el
menú desplegable la opción Percent overshoot.
Fig. 3.17 Sobrepaso máximo (Mp).
Fuente: Elaboración propia.
Cumplidos los pasos anteriores, se puede observar en la ventana del lugar de las raíces el
overshoot y el tiempo de establecimiento. Fig. 3.18
Figura 3.18 Lugar de las raíces, overshoot y tiempo de asentamiento.
Fuente: Elaboración propia.
73 En la barra de menú se dá click en Compensators - Format, Options y se elige la opción
Zero/Pole/Gain luego clic en Apply, Ok, esto con el fin de visualizar el controlador en formato
de ganancia, polos y ceros. Luego se dirige el cursor a la barra de menú y se selecciona la opción
Compensators Editor. Figura 3.19
Figura 3.19 Ventana de propiedades del compensador.
Fuente: Elaboración propia.
Debido a que el compensador PID consta de dos polos y dos ceros, donde uno de sus polos está
ubicado en el origen, se realiza los siguiente pasos.
Una vez abierto el editor del compensador se da click derecho en el recuadro como se indica en
la figura 3.20 y se selecciona la opción Add Real Zero y se asigna dos ceros arbitrariamente, se
hace lo mismo para la ubicación de los polos asignando uno al origen y el otro de forma
arbitraria. Se asigna una ganancia del controlador en la casilla Gain; por último se da click en
Apply y OK. (Los polos ubicados en la parte real positiva hacen inestables el comportamiento
del sistema).
74 Figura 3.20 Asignación de los parámetros del compensador.
Fuente: Elaboración propia.
La respuesta ante una entrada escalón para los parámetros seleccionados se muestra en la figura
3.21. Como se observa, el overshoot es de un 57% y el tiempo de establecimiento de 0.00133
segundos por lo que el controlador aún no cumple con las condiciones de diseño antes asignadas.
75 Figura 3.21 Repuesta a un escalón para los parámetros seleccionados.
Fuente: Elaboración propia.
La idea de ubicar los dos ceros y un polo en posiciones arbitrarias, se debe a que por medio de la
Sisotool que ofrece un entorno gráfico mediante el cual seleccionando estos ceros y polos y
arrastrándolos a través del eje real, podemos modificar la línea de acción de los polos dominantes
del sistema.
El objetivo al que se quiere llegar para obtener el controlador deseado, es el de posicionar los
ceros y el polo, ubicados arbitrariamente, de tal forma que la línea de acción pase justamente en
el lugar donde se cruzan el overshoot y el tiempo de establecimiento. De esta forma se puede
arrastrar los polos dominantes a ese punto, en el cual el controlador cumple con las condiciones
de diseño establecidas.
Después de varias pruebas de ubicación del polo y ceros del controlador se logra hacer coincidir
la línea de acción de los polos dominantes con el punto de corte entre el overshoot y el tiempo de
asentamiento.
76 Figura 3.22 Nuevos parámetros del compensador.
Fuente: Elaboración propia.
Como se puede observar en la ecuación del controlador, fue necesario ubicar los dos ceros
arbitrarios en: -2e005 y -1.6e005 y el polo en: -1.3e005, por lo cual, al ubicar los polos
dominantes en el punto de corte del overshoot y ts, se obtuvo una ganancia del controlador de
1e007.
Se dirige nuevamente el cursor a la pestaña Analysis – Response toStepcommand para
visualizar la respuesta al escalón del sistema de lazo cerrado con el controlador anteriormente
obtenido. Figura 3.23
77 Figura 3.23 Respuesta final del lazo cerrado de control.
Fuente: Elaboración propia.
En la figura 3.23 se puede observar que el sobrepaso es del 26% y el tiempo de establecimiento
ts de 3e-005seg, que son significativamente cercanos al 20% del overshoot y a los 0.0001seg. del
tiempo de establecimiento propuestos para el controlador. Por lo tanto, se opta por implementar
este controlador en el circuito RLC o planta.
Una vez obtenido estos parámetros, resta calcular los valores de los elementos del circuito PID.
Para ello, se debe exportar el compensador obtenido anteriormente de la Sisotool al workspace
de Matlab de la siguiente manera.
En la Sisotool, se da click en File – Export, inmediatamente se abre la ventana que se observa en
la Fig. 3.24, seleccionamos Compensator C y se da click en Export to workspace.
78 Figura 3.24 Ventana de importación de datos.
Fuente: Elaboración propia.
Hecho el paso anterior, se ubica en el workspace de Matlab y se visualiza el controlador
escribiendo en la ventana de comandos C y se presiona la tecla Enter.
Como se podrá ver el formato de la ecuación del controlador está en zpk.
Zero/pole/gain: 21 (s+1e005) (s+2.5e005) -­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐ s (s+3.5e005) Para visualizar el controlador en términos de potencias se escribe en el workspace tf(C).
21 s^2 + 7.35e006 s + 5.25e011 -­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐-­‐ s^2 + 350000 s 79 Se remite a la ecuación del circuito PID obtenida, se puede observar que es similar a la ecuación
del PID obtenido mediante la Sisotool. Esto se debe a que ambos controladores se caracterizan
por tener dos ceros y dos polos, uno de ellos ubicado en el origen. Por tanto, se procede a igualar
ambas ecuaciones.
+ ℎ
C(s) =
² + + 1
+ 1
( + 1
) = 21 2+7.35 006 +5.25 011 2+350000
Se expresa el controlador obtenido mediante la Sisotool de la siguiente forma:
( )= 1 2+ 1 + 1 ( + 1)
Se aplica el método de igualación de términos de ambas ecuaciones para hallar los valores de los
elementos del circuito PID.
1)
1=
2)
3)
1=
1=1
1=1
4)
+ ℎ
+1
Debido a que se cuenta con un sistema de 4 ecuaciones y 7 incógnitas, es necesario asumir un
valor de componente por etapa del circuito del PID, para así calcular los demás parámetros del
circuito.
En este caso se asumen valores de condensadores y resistencia para Cc, Cd y Rc:
80 Cc = 0.1nf Componente de la etapa integral.
Cd = 0.1nf Componente de la etapa derivativa.
Rc = 220Ω Componente de la etapa proporcional.
Se procede a despejar Rg de la ecuación 4)
5) Rg = 1D1Cd Se despeja Rf de la ecuación 3) y se reemplaza en esta, la ecuación 5)
Rf = 1 1
6) Rf = 1
1
Se despeja Rd de la ecuación 2), y se reemplaza en esta 5) y 6)
Rd = 1−1
;
7) Rd =(
1− 1 1)
1
Se despeja Rh de la ecuación 1), y se reemplaza en esta la ecuación 7) y 5)
Rh =( 1−
)
;
8) Rh =(
1+ 1 1^2− 1 1)1 1
Nuevamente se utiliza los comandos de MatLab para calcular los valores de los elementos del
circuito.
3.11 Cálculo de los valores de los elementos del circuito PID
Para extraer los parámetros A1 B1 C1 y D1 del controlador hallado en la Sisotool, se implementa
el siguiente código:
%============================================================
% Extracción de los parámetros del controlador C(s) obtenido mediante
la Sisotool.
%============================================================
%
A1*S^2+B1*S+C1
81 % C(s)= ---------------%
S*(S+D1)
% Se obtiene el numerador y el denominador del compensador.
[n2,d2]=tfdata(C,'v');
%Se extraen los parámetros de este:
A1=n2(1,1)
B1=n2(1,2)
C1=n2(1,3)
D1=d2(1,2)
Lo que da por resultado:
A1=21
B1= 14630000
C1= 1.3000e+012
D1= 130000
Cumplido el paso anterior se implementa las ecuaciones 5), 6), 7) y 8) en el siguiente código,
para obtener los valores de los elementos del circuito.
Se recuerda que anteriormente se asignaron valores a unos componentes del circuito:
Cc = 0.1nf
Componente de la etapa integral.
Cd = 0.1nf
Componente de la etapa derivativa.
Rc = 220Ω
Componente de la etapa proporcional.
Además de esto, se expresa la función de transferencia del circuito PID de la siguiente forma:
A2*S^2+B2*S+C2
C(s)= ---------------S*(S+D2)
82 %============================================================
%Función del Compensador PID con operacionales.
%============================================================
%
(Rd/Rc+Rh/Rg)S^2 + (Rd/(RcRgCd)+1/(RfCc))S + 1/(RfRgCcCd)
% C(s) = --------------------------------------------------------%
S*(S+1/(RgCd))
%
%Se expresa de esta forma la función del PID con operacionales.
%
A2*S^2+B2*S+C2
% C(s) = ----------------%
S*(S+D2)
%Se asigna un valor, solo a un componente de cada parte del
%circuito.
%(Parte proporcional, Parte integral y Parte derivativa), con
%el fin de obtener los valores de los demás componentes
%se aplica igualación de términos de ambos compensadores.
Cc=0.1e-9;
Cd=0.1e-9;
Rc=220;
%A2=A1; B2=B1; C2=C1; D2=D1 los parámetros del PID con
%operacionales son iguales a los parámetros del PID hallados en la
%Sisotool
%Cálculo de los demás componentes del circuito con
%operacionales.
fprintf('Resistencias calculadas:\n')
Rd=(B1-C1/D1)*Rc/D1
Rf=D1/(C1*Cc)
Rg=1/(D1*Cd)
Rh=(A1+C1/(D1^2)-B1/D1)/(D1*Cd)
Lo que da como resultado:
Rd = 7.8354e+003
Rf = 1000
Rg =7.6923e+004
Rh =3.8574e+005
83 4 Implementación del
Controlador PID
4.1 Selección de componentes para la implementación del sistema.
84 Luego de realizar el diseño del controlador que satisface los objetivos planeados, se procedió a
realizar la implementación; esto se inició eligiendo componentes electrónicos accesibles en el
mercado y de fácil uso.
En la siguiente tabla se indican los componentes usados para la construcción del controlador PID
analógico para la planta RLC, posteriormente se dará una breve descripción sobre la elección de
cada componente.
Componentes
Valor del
Descripción del componente
Cantidad
85 componente
Amp. Op.
Resistencias
Resistencias
Resistencias
Resistencia
1MΩ
1/4W
220 Ω
1/4W
100 Ω
1/4W
10K Ω
1/4W
Amp. Op. LM 324
2
Resistencias, 5%
11
Resistencias, 5%
1
Resistencias, 5%
1
Resistencias, 5%
1
Capacitores
0.1 nF
Cerámico
2
Inductor
37µH
Núcleo de ferrita
1
Capacitor
1 µF
Electrolítico 50V
1
Placa Virgen
-
15cmx15cm
1
Estaño
-
-
1
Cable
-
1mm
1m
Conexión
1
Potenciómetro de precisión
2
Simétrica
1
Potenciómetro de precisión
2
Caja
Potenciómetros
Fuente de
Alimentación
Potenciómetros
100KΩ
+9V / -9V
150KΩ
Lista de componentes electrónicos utilizados en la implementación del controlador PID.
Uno de los principales componentes usados fue el amplificador operacional LM 324
(encapsulado DIP de 14 terminales), porque es de bajo costo y es muy utilizado en diversas
86 aplicaciones analógicas, este amplificador es de alta ganancia; además la ganancia de frecuencia
unitaria está compensada con la temperatura.
Otras ventajas de utilizar el LM 324 es que en un solo componente contiene cuatros
operacionales, además tiene un alto rango de alimentación: Alimentación simple: entre 3V y
32V, Alimentación doble: entre +/- 1,5V y +/- 16V.
Se usaron resistencias de películas de carbón porque tienen como características principales
uniformidad de dimensiones, durabilidad, bajo nivel de ruido y alta estabilidad debido a su
estrecho coeficiente de temperatura, además es posible obtener valores en un rango bastante
amplio de resistencia.
El valor escogido para las resistencias usadas en la implementación del controlador se seleccionó
relativamente intermedio entre las resistencias comerciales existentes.
En el caso de los capacitores se usaron del tipo cerámico para el controlador y electrolítico para
la planta, este último es popular debido a su bajo costo y gran capacitancia por unidad de
volumen.
Para las correspondientes pruebas del controlador realizadas en protoboard, se seleccionaron
potenciómetros ajustables de 1 vuelta para cada uno de los parámetros del controlador PID, por
la comodidad que ofrecen; tanto por sus dimensiones físicas como de su fácil uso.
Para realizar las conexiones entre el controlador PID y los equipos externos se usaron bornes;
asimismo perillas para el fácil manejo de los potenciómetros.
Se usaron zócalos para los amplificadores operacionales LM 324 en la construcción del circuito
impreso con la finalidad de ofrecer ventajas en caso de ser necesario hacer cambios de
componentes, ya que de esta manera no se trabaja directamente sobre la placa, lo cual evita
daños en la misma.
87 4.2 Pruebas preliminares para la implementación del sistema.
La construcción de los diseños circuitales de cada etapa del controlador analógico se inició
realizando el montaje de los amplificadores operacionales LM 324, las resistencias y los
capacitores para comprobar el funcionamiento de las configuraciones diseñadas en el capítulo
anterior antes de realizar su respectivo circuito impreso.
El proceso de montaje fue el siguiente: se colocaron los amplificadores operacionales LM 324
sobre el protoboard, se anexaron tanto las resistencias como los capacitores según las
configuraciones diseñadas; se hicieron las respectivas conexiones para alimentar los
amplificadores operacionales LM 324 con la fuente de +9V, -9V y tierra.
Estas conexiones se realizaron de
la siguiente manera: los pines 3, 5, 10, y 12 de los
amplificadores se conectó a tierra, el pin 11 se conectó a la fuente de voltaje negativa de -9V y el
pin 4 se conectó a la fuente de voltaje positiva +9V, como se ve en la figura 4.1.
Figura 4.1 El sistema montado sobre el protoboard.
Fuente: Elaboración propia.
88 Realizadas tanto las conexiones como la energización de los amplificadores, se procedió a hacer
las pruebas correspondientes en cada proceso, para ellos se necesitó de un generador de señales,
un osciloscopio y cables de conexión.
Mediante los programas creados en MatLab mencionados en el capítulo anterior, se introdujeron
las especificaciones deseadas para el proceso y se seleccionó el valor del parámetro variable
correspondiente a la función en estudio del simulador.
Para realizar el ajuste se usó un multímetro (téster), para medir el valor resistivo adecuado; este
procedimiento se realizó en los cuatros potenciómetros correspondientes a los tres parámetros del
controlador.
Con el uso del osciloscopio se observó la señal de salida de la función controlada, observándose
que el controlador PID realizaba la acción de control correspondiente.
Figura 4.2 La señal de entrada y de salida de la función controlada.
Fuente: Elaboración propia.
89 4.3 Construcción del circuito impreso para el sistema.
Efectuadas las respectivas pruebas se obtuvo seguridad en el diseño seleccionado para el
controlador, por lo que se procedió a realizar el circuito impreso del sistema, para el efecto se
utilizó Proteus 7.9 SP1 (Electronics), en el cual se creó la simulación electrónica del PID.
Este simulador tiene dos fases, en la primera fase se realizó el montaje del diseño en ISIS, el cual
posee una gran diversidad de componentes electrónicos existentes en el mercado, lo cual
favorece al seleccionar los componentes con las características exactas que se desean.
Realizado el diseño se accedió a la fase dos, en esta se usa ARES, en la cual ya se tienen los
componentes utilizados en ISIS, por lo tanto sólo se crearon las pistas o conexiones entre los
componentes.
En las figuras 4.3 y 4.4 se pueden observar los diseños obtenidos tanto en ISIS como en ARES
para la realización del circuito impreso.
Figura 4.3 Diseño obtenido en Proteus: ISIS para la realización del circuito impreso.
Fuente: Elaboración propia.
90 Se realizó la impresión del circuito construido en Proteus (específicamente en ARES), el cual
debe ser impreso sobre un material transparente, luego se procedió a marcar, con pincel
indeleble, las pistas y los nodos en la placa.
Se sumergió la placa en percluro de hierro aproximadamente durante 20 minutos, se lavó con
agua, se dejó secar y así se obtuvo el circuito impreso.
Figura 4.4 Diseño obtenido en Proteus: ARES para la realización del circuito impreso.
Fuente: Elaboración propia.
Una vez creado el circuito impreso, se taladraron con las brocas adecuadas y se montaron todos
los componentes (zócalos, resistencias, capacitores, etc.) para realizar la soldadura de cada uno
de ellos en la placa.
En la figura 4.5 se observa el circuito impreso del sistema con sus respectivos componentes y los
cables de conexiones.
91 Construido totalmente el circuito impreso del sistema se procedió a acondicionar una caja, con el
fin de almacenar el circuito impreso.
Se hicieron las respectivas conexiones entre la fuente y el controlador, se adicionaron a la caja
los bornes, las perillas, los potenciómetros y todas las conexiones entre sí.
Para facilitar el manejo del sistema se etiquetó en la caja cada componente externo de la
siguiente manera:
Potenciómetro RD = Etapa proporcional.
Potenciómetro RF = Etapa integral.
Potenciómetros RH y RG = Etapa derivativa.
La señal de referencia se etiquetó como (IN), la señal de salida (OUT) es la señal de control, la
cual es proporcionada por el controlador.
La fuente de alimentación simétrica se indica con (+VCC) y (–VCC) y (GND) representa la
conexión común (tierra) que se debe conectar a todos los dispositivo que se estén utilizando.
92 Figura 4.5 El circuito impreso del sistema completo con sus respectivos componentes y los
cables de conexión.
Fuente: Elaboración propia.
En las siguientes figuras se observa el sistema completo implementado.
93 Figura 4.6 Vista superior del prototipo.
Fuente: Elaboración propia.
Figura 4.7 Vista lateral del prototipo.
Fuente: Elaboración propia.
94 De esta manera se concluyó con la implementación del sistema y se procedió con la realización
de las pruebas finales.
Las siguientes gráficas son obtenidas a través de un osciloscopio, es decir en formar
experimentales, por lo tanto no pueden compararse directamente con las gráficas simuladas
obtenidas en MatLab.
Figura 4.6 pruebas finales con diferentes tipos de señales.
Fuente: Elaboración propia.
95 5 Resultados y análisis
96 Fue necesario asumir valores de componentes por cada etapa del circuito PID:
Cc = 0.1nf
Componente de la etapa integral.
Cd = 0.1nf
Componente de la etapa derivativa.
Rc = 220Ω
Componente de la etapa proporcional.
Y los valores restantes del compensador obtenidos fueron:
Rd = 7.8354e+003
Rf = 1000
Rg =7.6923e+004
Rh =3.8574e+005
5.1 Simulación de las diferentes partes del sistema en lazo cerrado.
Figura 5.1 diagrama en bloques.
Fuente: Elaboración propia
En la figura 5.1 se observa el diagrama de bloques del sistema de lazo cerrado compensado,
donde X(s) es la entrada, e(s) es el error y Y(s) es la salida del sistema.
Para simular las diferentes respuestas del sistema, se crea un tren de pulsos que va a ser la
entrada del sistema.
97 %============================================================
%Se genera una onda cuadrada, que va a ser la señal de
%entrada, con un periodo de 1/1000, duración de 5e-3 seg y con
%muestras cada (1e-3)/100 segundos.
[u,t] = gensig('square',1/1000,5e-3,(1e-3)/100);
La ecuación Y(s)/X(s), que se denomina src (sistema retroalimentado compensado) es:
%Ecuación del sistema retroalimentado compensado
src=Compensador*Planta/(1+Compensador*Planta)
Al excluir el compensador de la anterior ecuación, se obtiene la función de transferencia del
sistema de lazo cerrado no compensada. Por lo tanto, a esta ecuación se le va a llamar srnc
(sistema retroalimentado no compensado).
%Ecuación del sistema retroalimentado no compensado.
srnc=(Planta/(1+Planta))
La ecuación del error del sistema, que es e (s), se la denominará s_error (señal de error):
%Señal de error.
s_error=1-src;
El siguiente código se implementa para graficar las señales [u,t], srnc, src y s_error.
%Se grafica todas las señales.
subplot(2,2,1),plot(t,u);
axis([0 5e-3 -0.2 1.2]);
title('Señal de entrada'),grid;
subplot(2,2,2),lsim(srnc,u,t);
axis([0 5e-3 -0.2 1.2]);
title('Salida sin compensar'),grid;
subplot(2,2,3),lsim(src,u,t);
axis([0 5e-3 -0.5 1.5]);
title('Salida compensada'),grid;
subplot(2,2,4),lsim(s_error,u,t);
axis([0 5e-3 -1.2 1.2]);
title('Señal de error'),grid;
98 Figura 5.2 Respuesta del sistema en MatLab ante una entrada de onda cuadrada.
Fuente: Elaboración propia.
Como se ve en las gráficas, la salida compensada es muy similar a la señal de entrada, por lo que
el compensador calculado cumple satisfactoriamente los parámetros asignados.
5.2 Simulación del sistema mediante Simulink.
Una forma de simular el sistema es por medio de Simulink, que se expresa mediante diagramas
de bloques.
99 Para efectuar este análisis, obtenido el controlador en la Sisotool, se dirige a la opción Tools –
Draw Simulink Diagram.
Una vez hecho el paso anterior, se despliega la ventana de Simulink y se expresa el sistema en
diagramas de bloques como se ve en la figura 5.3. Este en el bloque C, carga automáticamente el
controlador diseñado en la Sisotool y en el bloque planta, la función de transferencia de la
planta.
Figura 5.3 Diagrama de bloques en Simulink.
Fuente: Elaboración propia.
La entrada en el bloque input, se debe cargarla dando doble click sobre este mismo,
seleccionando el tipo de onda y la frecuencia, en este caso, cuadrada y con una frecuencia de
600Hz, respectivamente. Ver figura 5.4.
100 Figura 5.4 Asignación de los parámetros de entrada.
Fuente: Elaboración propia.
El diagrama de bloques de la figura 5.3, fue modificado con el objetivo de poder observar las
diferentes señales del sistema, como señal de entrada, sistema no compensado, sistema
compensado y señal de error, como se observa en la figura 5.5.
101 Figura 5.5 Diagrama modificado.
Fuente: Elaboración propia.
Los bloques untittledF y untittledH, fueron omitidos y además el bloque Output fue modificado
para visualizar 4 señales diferentes.
Esto se logra al dar doble click sobre el bloque llamado Output. Una vez hecho esto se procede
a agregar la cantidad de señales que se quiere visualizar, en este caso son 4.
102 Figura 5.6 Propiedades de la salida.
Fuente: Elaboración propia.
Ahora se asigna el tiempo de duración de la simulación como se observa en la figura 5.7, en este
caso el tiempo es de 0.005seg. Por último queda ejecutar el programa dando click en Simulation
– Start (Ver fig. 5.8). Para visualizar las señales del sistema, se da doble click al bloque llamado
Output y en esta misma ventana click en el icono Autoscale.
Figura 5.7 Asignación de tiempo de simulación.
Fuente: Elaboración propia.
103 Fig. 5.8 Simulación.
Fuente: Elaboración propia.
Figura 5.9 Las señales del sistema para una entrada cuadrada.
Fuente: Elaboración propia.
104 Figura 5.10 Las señales del sistema para una entrada senoidal.
Fuente: Elaboración propia.
105 Figura 5.11 Las señales del sistema para una entrada diente de sierra.
Fuente: Elaboración propia.
106 5.3 Pruebas del controlador PID analógico.
A continuación se presentan los resultados de las pruebas realizadas con el controlador PID para
el circuito RLC de segundo orden.
Para la realización de estas pruebas fue necesario el uso del generador de señales y un
osciloscopio, los cuales se ajustaron de acuerdo a las características deseadas para cada proceso.
En todas las pruebas fueron usadas diferentes tipos señales, tales como: onda cuadrada, senoidal
y dientes de sierra, las cuales se obtuvieron del generador de señales.
Figura 5.12 Las señales del sistema para una entrada de onda cuadrada.
Fuente: Elaboración propia.
107 Figura 5.13 Las señales del sistema para una entrada senoidal.
Fuente: Elaboración propia.
Figura 5.14 Las señales del sistema para una entrada diente de sierra.
Fuente: Elaboración propia.
108 6 Conclusiones
109
Se puede concluir que el diseño de compensadores es una labor complicada para un
diseñador inexperto, ya que se debe tener mucha paciencia y cuidado a la hora de calcular
los valores que este diseño necesite.
Con este proyecto el alumno tendrá la posibilidad de realizar prácticas de un sistema de
control automático real, en este caso, de tipo eléctrico-electrónico, donde podrá
manipular distintos tipos de señales, ya sean: ondas cuadradas, senoidales y dientes de
sierra. Además, podrá ajustar los parámetros, previamente calculados, para obtener la
salida deseada.
Una de las ventajas de este controlador es que se puede variar en forma individual la
ganancia de cada una de las etapas: proporcional (kp), integral (ki) y derivativa (kd). De
esta forma el alumno podrá apreciar en la práctica, que efecto causa cada una de ellas
sobre los diferentes tipos de señales.
El diseño de controladores mediante la Sisotool de MatLab, nos evita hacer tediosos
cálculos a mano, ya que por medio de su entorno gráfico nos hace las cosas más fáciles,
rápidas y también se puede observar el comportamiento del sistema con el controlador
actual en forma real.
110 7 Recomendaciones
Se insta a los estudiantes introducir algunas mejoras a este proyecto en caso de ser
necesario, tal como: utilizar un control selector, el cual permita la selección entre
distintos tipos de controladores (P, PI, PD, PID).
Se recomienda manipular el prototipo siempre supervisado por una persona calificada, a
fin de evitar algún tipo de daño material o humano.
Se sugiere utilizar el sistema en un ambiente no susceptible a ruidos o a cambios bruscos
de temperatura.
111 8 Bibliografía
KATSUHIKO OGATA, Ingeniería de Control Moderna, 4ª Ed. 2003, Prentice Hall.
ISBN 84-205-3678-4
BENJAMÍN C. KUO, Sistemas de Control Automático, 7ª Ed. 1996, Prentice Hall.
ISBN 968-880-723-0
ESTELBINA MIRANDA, Metodología de la Investigación cuantitativa y cualitativa. 1era
Ed. 2005.
ISBN: 99925-3-428-1
ROBERT BOYLESTAD, Teoría de Circuitos, 6ª Ed. Printice Hall.
ALBERT PAUL MALVINO, Principio de Electrónica, 6ª Ed. Mc Graw Hill
WILLIAM BOLTON, Ingeniería de Control, 2ª Ed. 2006, Alfaomega.
ISBN 790-15-0636-7
CORRIPIO S., Control Automático de Procesos, teoría y práctica, 3ª Ed 2005, Limaza
ANSTROM AND HAGGLUND, PID Controllers: Theory, Desing and Tunning, 2 a Ed.
ISA, 1995
PAOLO ANTOGNETTI AND GUISEPPE MASSOBRIO, Semiconductor Device
Modeling with Spice, Ed. 1988, McGraw-Hill 112 9 anexos
113 Instrucciones de uso del Controlador Análogo PID.
Figura 9.1 Instrucciones de uso.
1- Conectar la fuente de alimentación (F) a 220V AC.
2- El generador de señales se conecta a la entrada (A), elegir el tipo de señal, la amplitud y
la frecuencia adecuada.
3- La conexión común a tierra (B) debe ser conectada a todos los instrumentos.
4- Conectar el canal 1 del osciloscopio en la entrada (A) y el canal 2 a la salida (C).
5- Accionar la llave de la fuente de alimentación (E).
6- Para observar la señal de error conectar el canal 2 del osciloscopio a la salida del error
(D).
7- Con los potenciómetros (P1, P2, P3 y P4) se pueden variar los parámetros del
compensador.
114 Figura 9.2. Pruebas preliminares.
Figura 9.3 Respuesta antes una señal diente de sierra.
115 R
d
R
220Ω
Señ
al
R
1MΩ
R
2
3
2
6
Rf
6
3
R
1MΩ
R
1n
F
2
6
3
R
1MΩ
3
g
C
0.1n
F
2
6
3
R
R
1MΩ
R
1MΩ
R
1MΩ
2
Rh
R
1MΩ
C
1
Err
or
6
R1MΩ
2
3
6
R
100Ω
L
1
R 37u
H
10KΩ
Salida
C
1u
F
1M
2
6
3
R
1MΩ
Figura 9.4 El sistema de control completo en Proteus (ISIS).
Figura 9.5 Diagrama de conexiones del LM324.
116