Bajar PDF - Universidad Tecnológica Nacional
Anuncio

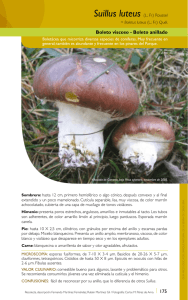
Contenido Damping 1dgl (Viscoso) Libre Vibraciones Mecánicas Introducción a la teorı́a de las vibraciones mecánicas Profesor Dr. Ing. Martı́n Sánchez Jefe de Trabajos Prácticos Ing. Gustavo Rosenthal Universidad Tecnológica Nacional - Facultad Regional La Plata Departamento de Ingenierı́a Mecánica 24 de Abril 2013 Casos Contenido Damping 1dgl (Viscoso) Libre 1 Amortiguamiento viscoso Definición Desarrollo analı́tico Ejemplo de amortiguación viscosa 2 Sistemas de un grado de libertad con amortiguamiento viscoso Definición: 1gdl (Recordatorio) Ecuación de movimiento para el sistema con amortiguamiento 3 Respuesta libre de los sistemas de 1gdl (Viscoso) Solución de la ecuación diferencial Amortiguamiento crı́tico 4 Distintos casos Sistema sobre-amortiguado - (ζ > 1) Sistema crı́ticamente amortiguado - (ζ = 1) Sistema sub-amortiguado - (ζ < 1) Casos Contenido Damping 1dgl (Viscoso) Libre Definición del amortiguamiento viscoso La amortiguación viscosa es el mecanismo de amortiguación más comúnmente utilizado en el análisis de vibración. Casos Contenido Damping 1dgl (Viscoso) Libre Definición del amortiguamiento viscoso La amortiguación viscosa es el mecanismo de amortiguación más comúnmente utilizado en el análisis de vibración. Cuando los sistemas vibran en un medio fluido (aire, gas, agua, o aceite) la resistencia ofrecida por el fluido hace que la energı́a se disipe. Casos Contenido Damping 1dgl (Viscoso) Libre Definición del amortiguamiento viscoso La amortiguación viscosa es el mecanismo de amortiguación más comúnmente utilizado en el análisis de vibración. Cuando los sistemas vibran en un medio fluido (aire, gas, agua, o aceite) la resistencia ofrecida por el fluido hace que la energı́a se disipe. La fuerza de amortiguación es proporcional a la velocidad del cuerpo vibrante. Casos Contenido Damping 1dgl (Viscoso) Libre Definición del amortiguamiento viscoso La amortiguación viscosa es el mecanismo de amortiguación más comúnmente utilizado en el análisis de vibración. Cuando los sistemas vibran en un medio fluido (aire, gas, agua, o aceite) la resistencia ofrecida por el fluido hace que la energı́a se disipe. La fuerza de amortiguación es proporcional a la velocidad del cuerpo vibrante. Casos Contenido Damping 1dgl (Viscoso) Libre Desarrollo analı́tico Amortiguamiento viscoso en placas paralelas Una placa fija y la otra móvil con velocidad v Las velocidades del fluido intermedias varı́an linealmente (entre 0 y v ) De acuerdo a la segunda ley de Newton de viscosidad: du τ =µ dy donde du/dy = v /h es el gradiente de velocidades. La fuerza de corte F será: µAv F = τA = = cv h donde la constante de amortiguamiento viscoso será: c= µA h Casos Contenido Damping 1dgl (Viscoso) Libre Amortiguamiento en cojinetes La velocidad tangencial del fluido en contacto es v = Rω Asumiendo variación lineal =⇒ v (r ) = rRω/d La tensión de corte es τ = µRω/d La fuerza torsional en el eje será: T = (τ A)R = 2πµR 3 lω d con A = 2πRl Ası́ la constante de amortiguamiento será: ct = T 2πµR 3 l = ω d Casos Contenido Damping 1dgl (Viscoso) Libre Recordar: Sistemas de un grado de libertad (SDoF) ¿Que son las vibraciones? Todo movimiento que se repite después de un intervalo de tiempo. Casos Contenido Damping 1dgl (Viscoso) Libre Recordar: Sistemas de un grado de libertad (SDoF) ¿Que son las vibraciones? Todo movimiento que se repite después de un intervalo de tiempo. ¿Que son los GdL? Mı́nimo de coordenadas independientes para determinar las posiciones de todas las partes. Casos Contenido Damping 1dgl (Viscoso) Ecuación de movimiento: Newton La ecuación diferencial ordinaria de 2◦ orden será: mẍ(t) + c ẋ(t) + kx(t) = f (t) con condiciones iniciales: x(t=0) = X0 ẋ(t=0) = V0 Libre Casos Contenido Damping 1dgl (Viscoso) Libre Casos Respuesta libre con amortiguamiento (i) La respuesta libre se basa en: mẍ(t) + c ẋ(t) + kx(t) = 0 (1) cuya solución es de la forma: x(t) = Ce st (2) Introduciendo 2 en 1 ⇒ Ecuación Caracterı́stica ms 2 + cs + k = 0 con: s1,2 = −c ± √ c 2 − 4mk c =− ± 2m 2m r c 2 k − 2m m Contenido Damping 1dgl (Viscoso) Libre Respuesta libre con amortiguamiento (ii) La solución será: x(t) = C1 e s1 t + C2 e s2 t Amortiguamiento crı́tico Se define como cc al valor de c para: c 2 k c − =0 2m m por lo tanto r cc = 2m k m Factor de amortiguamiento =⇒ ζ = c/cc La solución será: x(t) = C1 e √ −ζ+ ζ 2 −1 ω0 + C2 e √ −ζ− ζ 2 −1 ω0 Casos Contenido Damping 1dgl (Viscoso) Libre Sistema sobre-amortiguado - (ζ > 1) Con ζ > 1 se obtiene que p ζ2 − 1 > 0 Las raı́ces s1 y s2 son reales y distintas: p s1 = −ζ + ζ 2 − 1 ω0 < 0 p s2 = −ζ − ζ 2 − 1 ω0 < 0 con s2 << s1 . La solución será: x(t) = C1 e √ −ζ+ 1−ζ 2 ω0 t + C2 e √ −ζ− 1−ζ 2 ω0 t Casos Contenido Damping 1dgl (Viscoso) Libre Sistema crı́ticamente amortiguado - (ζ = 1) Con ζ = 1 ambas raı́ces s1 y s2 son iguales y reales. cc = −ω0 s1 = s2 = − 2m La solución será: x(t) = (C1 + C2 t) e −ω0 t Casos Contenido Damping 1dgl (Viscoso) Libre Sistema sub-amortiguado - (ζ < 1) Para ζ < 1 la condición ζ 2 − 1 es negativa y las raı́ces serán: s1 s2 p 2 = −ζ + i 1 − ζ ω0 p = −ζ − i 1 − ζ 2 ω0 La solución será: x(t) = C1 e x(t) = e √ −ζ+i 1−ζ 2 ω0 t −ζω0 t C1 e + C2 e √ i 1−ζ 2 ω0 t −ζ−i + C2 e √ 1−ζ 2 ω0 t √ −i 1−ζ 2 ω0 t Casos Contenido Damping 1dgl (Viscoso) Sistema sub-amortiguado - (ζ < 1) Libre Casos Contenido Damping 1dgl (Viscoso) Libre Casos