Redes Neuronales
Aprendizaje Supervisado
José Manuel Quero Reboul
Dpto. Ingeniería Electrónica
Universidad de Sevilla
Indice
• Perceptrón
– Regla delta
• Perceptrón Multicapa
– Retropropagación
• Ejemplos
• Video
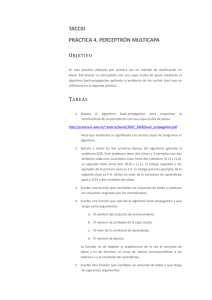
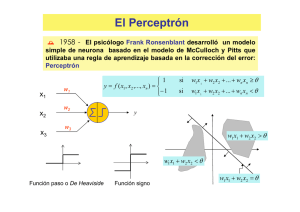
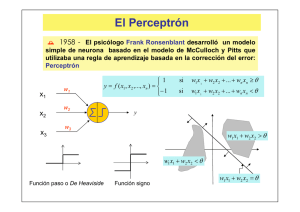
Perceptrón
•Memoria Asociativa
i1
θ
w1
Σ
w2
i2
-
n
o = f h ∑ w j i j − θ
j =1
+
wn
in
i1
A
Interpretación Geométrica
i1 = −
w0
θ
i0 +
w1
w1
Recta de Decisión
A
B
A
A
A
B
B
i0
B
Perceptrón
•Aprendizaje Supervisado: Regla δ
dwi
= α [ d (t ) −o(t )]ii (t )
dt
0 ≤ i ≤ n −1
d (t ), o(t ) ∈ {− 1,1}
Aprendizaje a partir de wi aleatorios
Problema: Oscilación ante entradas no separables
Ejemplo: función XOR
Patron de Entrada
00
01
10
11
Patron de Salida
0
1
1
0
1
0
0
1
Perceptrón
Solución: Añadir una dimensión adicional
Patron de Entrada Patron Intermedio Patron de Salida
00
0
000
01
1
010
10
1
100
11
0
111
0
Nodos de representación interna
0
1
1
Indice
• Perceptrón
– Regla delta
• Perceptrón Multicapa
– Retropropagación
• Ejemplos
• Video
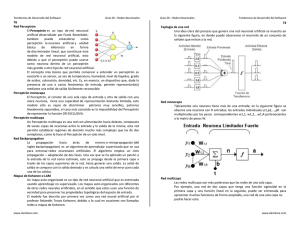
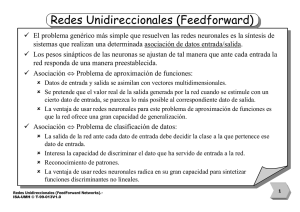
Perceptrón Multicapa
Estructura
Una capa
Dos capas
Tres capas
Regiones de
Decisión
Semiespacios
limitados por
hiperplanos
Regiones
convexas
abiertas o
cerradas
Arbitrarias.
Complejidad
limitada por
el número
de nodos
Problema XOR
A
Clases
Complejas
B
A
B
B
A
A
B
A
B
B
A
A
B
A
B
B
A
Regiones de
Decisión Generales
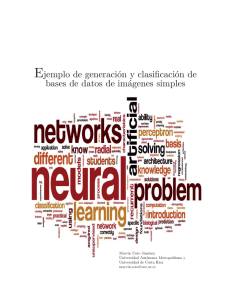
Perceptrón Multicapa
oi = f (neti − θ )
Capa de
Salida
n
neti = ∑ wij i j
j =1
OR
oi = f ( neti )
AND
1
f ( x) =
Capas
Ocultas
1
1 + e−x
0
θ
HIPERPLANOS
Capa de
Entrada
1 − e− x
f ( x) =
1 + e− x
1
θ
-1
Indice
• Perceptrón
– Regla delta
• Perceptrón Multicapa
– Retropropagación
• Ejemplos
• Video
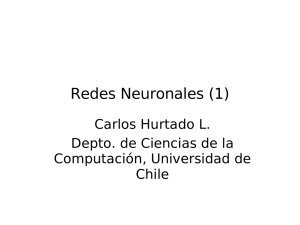
Perceptrón Multicapa
Capa de
Salida
Retropropagación
OR
(Regla δ generalizada)
∆ p wij (t + 1) = η δ j ii
AND
Capas
Ocultas
f j′(net pj )(d j − o j ) Capa de Salida
δ j = f ′(net ) δ w
Capas Ocultas
pj ∑ k ij
j
k
HIPERPLANOS
Capa de
Entrada
capa i previa a j
Perceptrón Multicapa
Retropropagación: Demostración
E ≡ ∑ Ep =
Error Cuadrático Médio
p
∂E p
Regla de la cadena
∂w ji
=
∂E p ∂net pj
∂net pj ∂w ji
2
1
(
d
−
o
)
∑∑ pj pj
2 p j
(1)
Cambio del error al variar
la excitación en j
Segundo Término
∂net pj
∂w ji
=
∂
(∑ w ji o pi ) =o pi (2)
∂w ji i
Primer Término
Definamos δ pj ≡ −
∂E p
∂net pj
(3)
Cambio de la excitación la
variar el peso de conexión
Sustituyendo (2) y (3)en (1) ⇒ ∆ p w ji = ηδ pj o pj
Queda determinar qué es δ pj para cada neurona
Perceptrón Multicapa
Regla de la cadena δ pj = −
∂E p
∂net pj
=−
∂E p ∂o pj
Cambio de la salida por
cambiar la excitación
∂o pj ∂net pi
Cambio del error al variar
la salida
Segundo Término
Dado que
o pj = f (net pj ) ⇒
∂o pj
∂net pj
= f ′(net pj )
Derivada de la función de salida
Primer Término
Para neurona de salida. Dado que E p = 1 ∑ (d pj − o pj ) 2⇒ ∂E p = −(d pj − o pj )
2
j
∂o pj
⇒ δ pj = f ′(net pj )(d pj − o pj )
Perceptrón Multicapa
Para neurona oculta.
∂E p
∂o pj
=∑
k
∂E p ∂net pk
∂net pk ∂o pj
=∑
k
∂E p
∂net pk
Cómo afecta a la
capa previa
∂E p
∂
wkj = −∑ δ pk wkj
∑ wki o pi = ∑
∂o pj i
k ∂net pk
k
δ de la capa previa
Conexión con la
neurona previa
⇒ δ pj = f ′( net pj )∑ δ pk wkj
k
Particularizando o pj =
1
1+ e
− net j
⇒ o′pj = f ′(net j ) =
e
− net j
(1 + e )
− net j 2
= o pj (1 − o pj )
o j (1 − o j )(d j − o j ) Capa de Salida
⇒ δ j = i (1 − i ) δ w
Capas Ocultas
j ∑ k ij
j
k
Indice
• Perceptrón
– Regla delta
• Perceptrón
Multicapa
– Retropropagación
• Ejemplos
• Video
Ejemplos
Identificación de sistemas.
u (k )
y p (k )
Planta no
lineal
TDL
TDL
Σ
+
Red
Neuronal
yˆ p (k + 1)
[
ei (k )
yˆ p (k )
z-1
]
y p (k + 1) = f y p ( k ), y p (k − 1) + u ( k )
[
[
]
y p ( k ) y p (k − 1) y p (k ) + 2´5
]
f y p (k ), y p (k − 1) =
1 + y p ( k ) + y p (k − 1)
2
[
2
]
y p (k + 1) = N y p (k ), y p ( k − 1) + u (k )
N ∈ N 2,20,10,1
Ejemplos
[
Control de sistemas.
]
y p (k + 1) = f y p ( k ), y p (k − 1) + u ( k )
f [y
p
(k ), y p
y
]
(k − 1) =
p
[
]
( k ) y p (k − 1) y p (k ) + 2´5
1 + y p ( k ) + y p (k − 1)
2
2
ym (k + 1) = 0'6 ym ( k ) + 0'2 ym (k − 1) + r (k )
Modelo
de
Referencia
ym (k )
N i ∈ N 2,20,10,1
r
Identificador
Neuronal
u (k )
Controlador
Neuronal
-
Σ
Planta No y p (k ) +
Lineal
N c ∈ N 2,25,10,1
-
yˆ p ( k )
ei (k )
Σ
+
ec (k )
Ejemplos
Control de sistemas.
Respuesta sin controlador
Respuesta con controlador
Ejemplos
Control de sistemas.
Respuesta con Ti=Tc=1
Respuesta con Ti=1 y Tc=3
 0
0