IMPLEMENTACION DE UN CONTROLADOR PID ANALOGICO
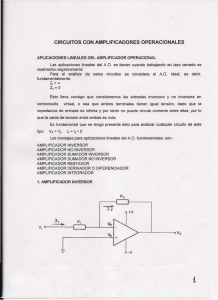
La implementación de un controlador PID mediante herramientas básicas de la electrónica
requiere conocer la función de transferencia de un amplificador operacional polarizado como
amplificador inversor, como se muestra en la figura 2, en la cual Z 1 y Z2 son impedancias.
Conociendo las características de alta ganancia de los amplificadores operacionales, y
sabiendo además que su impedancia de entrada es muy alta, se puede determinar la
siguiente relación:
VS
Z
= − 2
VI
Z1
Figura 2: Amplificador inversor
Si Z2 y Z1 son resistencias, se obtiene un controlador P, es decir, con sólo acción
proporcional. Si Z1 es una resistencia y Z2 es un condensador, se tiene acción integral. Si
Z1 es un condensador y Z2 una resistencia, la acción es derivativa.
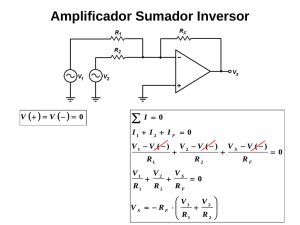
La figura 3 muestra un circuito que permite realizar la suma ponderada de voltajes, esto es:
VS = − ∑
i
RrVi
Ri
Figura 3: Amplificador inversor como sumador
En este caso, la relación es similar al caso de la ganancia proporcional, con la diferencia que
existen varias entradas. Los factores de ponderación individuales se varían ajustando
apropiadamente las resistencias.
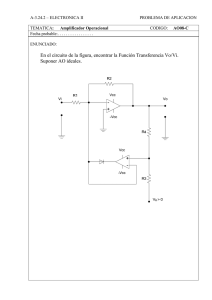
Para obtener el error como diferencia entre las referencias y la variable controlada, se
puede utilizar el circuito de la figura 4.
Figura 4: Amplificador diferencial
Si las cuatro resistencias son iguales, se tiene que
VS = V2 − V1
A continuación se muestra un esquema simplificado de un controlador PID. Esta compuesto
por el OpAmp R que calcula el error como diferencia entre la referencia (set point) y la
variable controlada Vc; los OpAmps P (proporcional), I (integral) y D (derivativo) y sus
correspondientes ajustes de ganancia; el sumador S que calcula la variable manipulada Vm
y, por último, la planta, de la que se toma la variable controlada Vc.
Los OpAmps deben cumplir ciertos requisitos mínimos de velocidad, excursión de
tensión, corrientes de salida y polarización, estabilidad térmica, etc.
Para esta experiencia, los cuatro OpAmps R, P, D y S pueden implementarse con un
LM324.
El integrador es crítico. La corriente de polarización y el offset cargan el condensador
Ci produciendo una deriva dependiente también de la temperatura que al cabo de un
cierto tiempo puede dejar el OpAmp saturado. Por este motivo se recomienda usar un
OpAmp con entrada por FET y con offset reducido, p.e. LF351 (ver aplicaciones en hoja
de datos), LF353, etc. Observe que debe incluir algún modo de descargar Ci (reset)
cada vez que inicia una prueba para eliminar la carga resultante de pruebas anteriores
no relacionadas. Esto puede ser un contacto metálico o, si las excursiones en I se
mantienen dentro de +- 10V, se puede usar un dispositivo como el LF13331.
El diseño del derivador presenta problemas debido a la amplificación del ruido. Por
esta razón, debe agregarse un pasabajos con una constante de tiempo que no
perturbe demasiado las variaciones debidas al proceso, p.e.: 0.1*Cd*Rd .
La planta se puede implementar con resistencias y condensadores, usando valores
para las constantes de tiempo que faciliten el ajuste, p.e.: 0.01 segundo hasta 0.001
segundo. El modelo más simple es una pasabajos de un polo compuesto por una
resistencia de 2K2 Ω y un condensador de 4.7 µf. Se puede agregar un segundo polo
sin necesidad de amplificar usando una R2 = 10*R = 22KΩ. Para ubicar este segundo
polo p.e. en una frecuencia 5 veces más alta se puede usar un condensador de 0.1µf.
Un sistema implementado de este modo permite experimentar diferentes metodos de
ajuste p.e. Ziegler-Nichols en lazo abierto y cerrado, criterio cuártico, etc., verificando
fácilmente los resultados en un osciloscopio.
 0
0