TABLAS PRECALCULADAS PARA PUNTOS DE CONTACTO
Anuncio

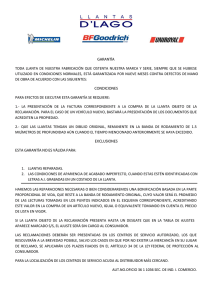
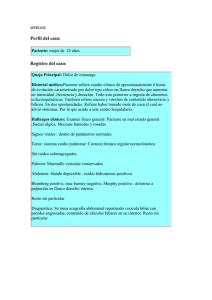
6 - TABLAS PRECALCULADAS PARA PUNTOS DE CONTACTO _______________________________________________________ CAPÍTULO 6 TABLAS PRECALCULADAS PARA PUNTOS DE CONTACTO "LOOKUP TABLES" _______________________________________________________ 6.1. INTRODUCCIÓN El concepto de tabla precalculada o lookup table hace referencia al conjunto de datos almacenados en una tabla que permiten un rápido acceso a ellos. Este concepto surge de la necesidad de calcular aquellos valores obtenidos mediante expresiones altamente no lineales y que requieren un alto coste computacional. Así, al tener en una tabla precalculada todas las posibilidades que pueden alcanzar ciertas variables, se consigue que no sea necesario un cálculo adicional de las mismas durante la simulación. En el presente proyecto, se han desarrollado tablas precalculadas para la localización de los puntos de contacto entre rueda y carril, pues se trata de un problema geométrico no lineal cuya determinación en cada instante de tiempo en la simulación, supone un alto coste computacional como se ha mostrado en el capítulo 1. De igual forma, y como se verá más adelante, se han introducido en las tablas precalculadas las coordenadas y sus derivadas numéricas del eje ferroviario, pues aparecen en las restricciones de la simulación. 55 MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA 6.2. TIPOS DE CONTACTO EN RUEDA - CARRIL Para la realización de la tabla precalculada, primero hay que conocer previamente qué tipos de contacto entre rueda y carril se pueden dar. El contacto entre rueda y carril, puede darse de 3 formas distintas que se resumen en la tabla 6.1. El caso genérico que ocurre en la mayoría de los casos se da cuando hay sólo un punto de contacto por cada pareja de rueda - carril y éste se produce en la llanta de la rueda tal y como se muestra en la figura 6.1. Figura 6.1. Contacto en llanta TIPO DE Nº PUNTOS DE ¿CONTACTO EN ¿CONTACTO EN CONTACTO CONTACTO LLANTA? FLANCO? Contacto en llanta 1 SI NO Contacto remonte 1 NO SI Contacto en flanco 2 SI SI Tabla 6.1. Tipos de puntos de contacto Otro caso posible de contacto se da en el flanco de la rueda, cuando se produce remonte de la misma sobre el carril y nos encontramos cerca del descarrilamiento del vehículo. Este caso con un sólo punto de contacto, se muestra en la figura 6.2. 56 6 - TABLAS PRECALCULADAS PARA PUNTOS DE CONTACTO Figura 6.2. Contacto en remonte de rueda Finalmente el caso de transición entre el contacto en llanta y cuando se produce el remonte de rueda se da en el instante en que el flanco toca con el carril y hay por tanto 2 puntos de contacto. Uno en la llanta y otro en el flanco. Este caso se muestra en la figura 6.3. Figura 6.3. Contacto en flanco 57 MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA 6.3. TABLAS PRECALCULADAS PARA PUNTOS DE CONTACTO RUEDA CARRIL El objetivo es la elaboración de unas tablas precalculadas a las que se accedan en función de la posición del eje ferroviario con respecto a la línea central de la vía. Para ello hay que conocer los grados de libertad del sistema para saber el número de entradas o 𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖, que la tabla precalculada debe disponer. El vector de coordenadas del eje ferroviario se expresa según 6.1.a, en donde 𝑥𝑥 es la coordenada longitudinal de avance con respecto al TCS, 𝑦𝑦 y 𝑧𝑧 son la lateral y vertical respectivamente, 𝜑𝜑 es el ángulo sobre el eje 𝑥𝑥 o 𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟, 𝜃𝜃 sobre el eje 𝑦𝑦 o 𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝ℎ y 𝜓𝜓 sobre el eje 𝑧𝑧 o 𝑦𝑦𝑦𝑦𝑦𝑦. Nótese que dada la disposición geométrica del problema, la coordenada 𝑥𝑥 puede suponerse nula al considerar que el eje no tiene desplazamiento longitudinal respecto al TCS. De igual forma, el ángulo de 𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝ℎ 𝜃𝜃, es independiente para la localización del punto de contacto en éste sistema de referencia. Todo ello, permite definir el vector de coordenadas del eje ferroviario como un vector de 4 incógnitas (6.1.b). 𝒒𝒒𝑒𝑒𝑒𝑒𝑒𝑒 = [ 𝑥𝑥 𝑦𝑦 𝑧𝑧 𝜑𝜑 𝜃𝜃 𝜓𝜓 ] (6.1. 𝑎𝑎) 𝒒𝒒𝑒𝑒𝑒𝑒𝑒𝑒 = [ 𝑦𝑦 𝑧𝑧 𝜑𝜑 𝜓𝜓 ] (6.1. 𝑏𝑏) Para conocer el número de grados de libertad del sistema, se establece que la formulación empleada para la teoría de contacto, es la del Método Rígido expuesto en el capítulo 5, en la que no se permite indentación. Esta teoría introduce 5 ecuaciones algebraicas según la expresión 5.2. y 4 coordenadas o parámetros de superficie. Es decir, en cada contacto con esta formulación se elimina un grado de libertad del sistema. La tabla 6.2, indica los grados de libertad del sistema para cada tipología de contacto, es decir, las entradas o 𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖 que deben tener las tablas precalculadas. CONTACTO EN LLANTA GRADOS CONTACTOS INCÓGNITAS INCÓGNITAS POR EJE POR POR EJE FERROVIARIO CONTACTO FERROVIARIO 2 4 4 5 2 2 4 4 5 2 3 4 4 5 1 RESTRICCIONES POR CONTACTO DE LIBERTAD CONTACTO EN REMONTE CONTACTO EN FLANCO Tabla 6.2. Grados de Libertad según tipología de contacto 58 6 - TABLAS PRECALCULADAS PARA PUNTOS DE CONTACTO Bajo estas suposiciones, se tiene un sistema de dos grados de libertad para los casos de contacto en llanta o remonte en donde hay 12 incógnitas (las 4 del eje ferroviario y 8 de los parámetros de superficie de los 2 contactos) y 10 ecuaciones de restricción (5 por cada contacto). Se eligen 2 de las incógnitas como entradas de la tabla precalculada, que en este caso se tratan de las coordenadas 𝑦𝑦 y 𝜓𝜓, y se les genera valores numéricos para los cuales se resuelven el sistema de ecuaciones algebraicas no lineales. (6.2. 𝑎𝑎) 𝑧𝑧𝑒𝑒𝑒𝑒𝑒𝑒 = 𝑓𝑓�𝑦𝑦𝑒𝑒𝑒𝑒𝑒𝑒 , 𝜓𝜓𝑒𝑒𝑒𝑒𝑒𝑒 � 𝜑𝜑𝑒𝑒𝑒𝑒𝑒𝑒 = 𝑓𝑓�𝑦𝑦𝑒𝑒𝑒𝑒𝑒𝑒 , 𝜓𝜓𝑒𝑒𝑒𝑒𝑒𝑒 � 𝑗𝑗 𝑠𝑠𝐼𝐼 = 𝑓𝑓�𝑦𝑦𝑒𝑒𝑒𝑒𝑒𝑒 , 𝜓𝜓𝑒𝑒𝑒𝑒𝑒𝑒 �, 𝐼𝐼 = 𝐿𝐿, 𝑅𝑅 𝑗𝑗 = 𝑤𝑤, 𝑟𝑟 (6.2. 𝑏𝑏) (6.2. 𝑐𝑐) Para la tabla de flanco, se tienen 16 incógnitas (4 del eje, y 12 de los parámetros de los 3 contactos) y 15 ecuaciones de restricción, es decir, un grado de libertad, por lo que la dependencia de la tabla precalculada se realiza en función del ángulo de 𝜓𝜓. Sin embargo, si el ángulo de 𝜓𝜓 es pequeño como suele ocurrir en dinámica ferroviaria, la dependencia del desplazamiento vertical y del ángulo de 𝜑𝜑 es insignificante con 𝜓𝜓. Por ello, y por simplicidad, se puede asumir que no hay dependencia con el ángulo de 𝜓𝜓 y la expresión 6.2 quedaría como sigue: (6.3. 𝑎𝑎) 𝑧𝑧𝑒𝑒𝑒𝑒𝑒𝑒 = 𝑓𝑓�𝑦𝑦𝑒𝑒𝑒𝑒𝑒𝑒 , 𝜓𝜓𝑒𝑒𝑒𝑒𝑒𝑒 � ≅ 𝑓𝑓(𝑦𝑦𝑒𝑒𝑒𝑒𝑒𝑒 ) 𝜑𝜑𝑒𝑒𝑒𝑒𝑒𝑒 = 𝑓𝑓�𝑦𝑦𝑒𝑒𝑒𝑒𝑒𝑒 , 𝜓𝜓𝑒𝑒𝑒𝑒𝑒𝑒 � ≅ 𝑓𝑓(𝑦𝑦𝑒𝑒𝑒𝑒𝑒𝑒 ) 𝑗𝑗 𝑠𝑠𝐼𝐼 = 𝑓𝑓�𝑦𝑦𝑒𝑒𝑒𝑒𝑒𝑒 �, 𝐼𝐼 = 𝐿𝐿, 𝑅𝑅 𝑗𝑗 = 𝑤𝑤, 𝑟𝑟 (6.3. 𝑏𝑏) (6.3. 𝑐𝑐) En los sucesivos apartados se muestra la elaboración de la tabla precalculada para cada uno de los casos estudiados (llanta, remonte y flanco), considerando tanto dos grados de libertad (𝑦𝑦, 𝜓𝜓), como un sólo grado de libertad (𝑦𝑦). 59 MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA 6.3.1. SIMETRIA Las relaciones de simetría y antisimetría entre los parámetros que se determinan en la tabla precalculada, permiten reducir a un cuarto el número de parámetros a calcular siendo el origen de esta simetría las coordenadas 𝑦𝑦 = 0, y 𝜓𝜓 = 0. Como se puede observar en la figura 6.4, se ha calculado la tabla precalculada para los valores positivos de las coordenadas independientes del sistema 𝑦𝑦 y 𝜑𝜑, Figura 6.4 Simetría en tabla precalculada. Sin embargo, cada una de las relaciones dependerá de la rueda sobre la que se aplica la simetría y del parámetro en cuestión. En los siguientes apartados, en función del tipo de tabla precalculada y de los grados de libertad, se muestran las relaciones entre los parámetros de los 4 cuadrantes. 6.3.2. TABLA PRECALCULADA CON 2 GDL Se aporta un vector de valores para cada variable 𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖. Estos valores deben encontrarse dentro del rango de la geometría propia del problema [13]. Con ellos, se calculan las variables dependientes para tener determinado completamente la localización del eje ferroviario. Una vez localizado el eje ferroviario, se calculan las derivadas numéricas de sus coordenadas y se extraen los valores de los parámetros de contacto entre rueda - carril para almacenarlos en la tabla precalculada. Es decir, se ha conseguido disponer para cada pareja de 𝑦𝑦 , 𝜓𝜓 la localización del eje y los parámetros de contacto correspondientes según el esquema de la figura 6.5. 60 6 - TABLAS PRECALCULADAS PARA PUNTOS DE CONTACTO COORDENADAS EJE FERROVIARIO COORDENADAS INDEPENDIENTES COORDENADAS DEPENDIENTES 𝒒𝒒 = [𝑥𝑥 𝑦𝑦 𝑧𝑧 𝜑𝜑 𝜃𝜃 𝜓𝜓 ]𝑻𝑻 𝒒𝒒𝒊𝒊𝒊𝒊𝒊𝒊 = [ 𝑥𝑥 𝑦𝑦 𝜃𝜃 𝜓𝜓 ]𝑻𝑻 𝑥𝑥, 𝜃𝜃 → irrelevantes 𝒒𝒒𝒅𝒅𝒅𝒅𝒅𝒅 = [ 𝑧𝑧 𝜑𝜑 ]𝑻𝑻 OBTENER PARÁMETROS DE CONTACTO 𝒔𝒔𝒘𝒘 𝟏𝟏 , GRADOS DE LIBERTDAD 𝑦𝑦 , 𝜓𝜓 𝒔𝒔𝒘𝒘 𝟐𝟐 , 𝒔𝒔𝒓𝒓𝟏𝟏 , 𝒔𝒔𝒓𝒓𝟐𝟐 CALCULO DE LAS DERIVADAS NUMÉRICAS DE LAS COORDENADAS ALMACENAR TABLA PRECALCULADA CÁLCULO COORDENADAS DEPENDIENTES CONOCIDAS LAS COORDENADAS DEL EJE 𝑧𝑧 = 𝑓𝑓 𝑧𝑧 (𝑦𝑦, 𝜓𝜓) 𝜑𝜑 = 𝑓𝑓 𝜑𝜑 (𝑦𝑦, 𝜓𝜓) FIN Figura 6.5. Generación tabla precalculada con 2 GDL 6.3.2.1. DERIVADAS NUMÉRICAS PARA TABLA DE 2 GDL El cálculo de las derivadas de las coordenadas de posición del eje ferroviario es necesario debido al sistema de ecuaciones del movimiento visto en el capítulo 4 y que se muestra según la expresión 6.3a en donde las restricciones están expresadas a nivel de aceleraciones (véase capítulo 4.3). 𝑴𝑴 � 𝑪𝑪𝒒𝒒 𝑸𝑸 𝑪𝑪𝑻𝑻𝒒𝒒 𝒒𝒒̈ � �� � = � ̇ −𝑪𝑪𝒒𝒒 𝒒𝒒̇ − 𝑪𝑪̇𝒕𝒕 0 −𝝀𝝀 (6.3𝑎𝑎) Estas restricciones, dependerán de si nos encontramos en la zona de contacto de llanta o remonte, o de contacto en flanco. En el primer caso, se introducen 2 restricciones mientras que en el caso de contacto en flanco, al tener 3 puntos de contacto son 3 las restricciones que se introducen. 61 MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA 6.3.2.1.1. RESTRICCIONES Y DERIVADAS NUMÉRICAS EN CONTACTO EN LLANTA O REMONTE Estas restricciones a nivel de posición son un total de 2 y se muestran en 6.4 siendo 𝑪𝑪(𝒒𝒒) el vector de restricciones y 𝑓𝑓 𝑧𝑧 y 𝑓𝑓 𝜑𝜑 la coordenada vertical y roll obtenidos de la tabla precalculada, es decir, 𝑓𝑓 𝑧𝑧 = 𝑧𝑧𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙 = 𝑓𝑓(𝑦𝑦, 𝜓𝜓) y 𝑓𝑓 𝜑𝜑 = 𝜑𝜑𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙 = 𝑓𝑓(𝑦𝑦, 𝜓𝜓). 𝑪𝑪(𝒒𝒒) = 𝟎𝟎 𝑧𝑧𝑒𝑒𝑒𝑒𝑒𝑒 − 𝑓𝑓 𝑧𝑧 = 0 𝐶𝐶1 → (6.4. 𝑎𝑎) 𝜑𝜑𝑒𝑒𝑒𝑒𝑒𝑒 − 𝑓𝑓 𝜑𝜑 = 0 𝐶𝐶2 → (6.4) (6.4. 𝑏𝑏) Dada la expresión 6.3 es necesario obtener el jacobiano de las restricciones 𝑪𝑪𝒒𝒒 y la derivada temporal del mismo 𝑪𝑪𝒒𝒒̇ . Para el cálculo de los mismos se sigue el desarrollo de 6.5 y 6.6 respectivamente. 0 −𝑓𝑓𝑦𝑦𝑧𝑧 𝑓𝑓𝑦𝑦𝑧𝑧 = 𝜕𝜕𝑓𝑓 𝑧𝑧 , 𝜕𝜕𝜕𝜕 𝑪𝑪𝒒𝒒 = � 0 𝑓𝑓𝜓𝜓𝑧𝑧 = 𝜑𝜑 −𝑓𝑓𝑦𝑦 𝜕𝜕𝑓𝑓 𝑧𝑧 , 𝜕𝜕𝜕𝜕 1 0 𝜑𝜑 0 0 1 0 𝑓𝑓𝑦𝑦 = −𝑓𝑓𝜓𝜓𝑧𝑧 𝜕𝜕𝑓𝑓 𝜑𝜑 , 𝜕𝜕𝜕𝜕 (6.5) 𝜑𝜑 � −𝑓𝑓𝜓𝜓 𝜑𝜑 𝑓𝑓𝜓𝜓 = 𝜕𝜕𝑓𝑓 𝜑𝜑 𝜕𝜕𝜕𝜕 𝑧𝑧 𝑧𝑧 𝑧𝑧 𝑧𝑧 𝑦𝑦̇ − 𝑓𝑓𝑦𝑦𝑦𝑦 𝜓𝜓̇ 0 0 0 −𝑓𝑓𝜓𝜓𝜓𝜓 𝑦𝑦̇ − 𝑓𝑓𝜓𝜓𝜓𝜓 𝜓𝜓̇ 0 −𝑓𝑓𝑦𝑦𝑦𝑦 ̇ 𝑪𝑪𝒒𝒒 = � 𝜑𝜑 𝜑𝜑 ̇ 𝜑𝜑 𝜑𝜑 ̇ � 0 −𝑓𝑓𝑦𝑦𝑦𝑦 𝑦𝑦̇ − 𝑓𝑓𝑦𝑦𝑦𝑦 𝜓𝜓 0 0 0 −𝑓𝑓𝜓𝜓𝜓𝜓 𝑦𝑦̇ − 𝑓𝑓𝜓𝜓𝜓𝜓 𝜓𝜓 𝑖𝑖 𝑓𝑓𝑦𝑦𝑦𝑦 = 𝜕𝜕𝑓𝑓𝑦𝑦𝑖𝑖 , 𝜕𝜕𝜕𝜕 𝑖𝑖 𝑓𝑓𝑦𝑦𝑦𝑦 = 𝜕𝜕𝑓𝑓𝑦𝑦𝑖𝑖 𝑖𝑖 = 𝑓𝑓𝜓𝜓𝜓𝜓 , 𝜕𝜕𝜕𝜕 𝑖𝑖 𝑓𝑓𝜓𝜓𝜓𝜓 = 𝜕𝜕𝑓𝑓𝜓𝜓𝑖𝑖 𝜕𝜕𝜕𝜕 , 𝑖𝑖 = 𝑧𝑧, 𝜑𝜑 (6.5. 𝑎𝑎) (6.6) (6.6. 𝑎𝑎) El cálculo de las derivadas se realiza por diferencias finitas centrales según la expresión 6.7, siendo ℎ𝑘𝑘 el paso de la variable entre 2 instantes consecutivos y 𝑛𝑛 la posición sobre la que evaluar la variable 𝑗𝑗. 𝑓𝑓𝑗𝑗𝑗𝑗𝑖𝑖 = 62 𝜕𝜕𝑓𝑓𝑗𝑗𝑖𝑖 𝜕𝜕𝜕𝜕 = 𝑓𝑓𝑗𝑗𝑖𝑖 (𝑗𝑗𝑛𝑛+1 ) − 𝑓𝑓𝑗𝑗𝑖𝑖 (𝑗𝑗𝑛𝑛−1 ) 2 ℎ𝑘𝑘 , 𝑖𝑖 = 𝑧𝑧, 𝜑𝜑; 𝑗𝑗 = 𝑦𝑦, 𝜓𝜓; 𝑘𝑘 = 𝑦𝑦, 𝜓𝜓 (6.7) 6 - TABLAS PRECALCULADAS PARA PUNTOS DE CONTACTO 6.3.2.1.2. RESTRICCIONES Y DERIVADAS NUMÉRICAS EN CONTACTO EN FLANCO En el contacto en flanco, solamente existe un único grado de libertad al haber 3 puntos de contacto en cada eje. El vector de restricciones 𝑪𝑪(𝒒𝒒), su jacobiano 𝑪𝑪𝒒𝒒 y derivada temporal del mismo 𝑪𝑪𝒒𝒒̇ quedarían como sigue a continuación siendo 𝑔𝑔 𝑧𝑧 , 𝑔𝑔𝜑𝜑 y 𝑔𝑔𝜓𝜓 la coordenada vertical roll y yaw obtenidos de la tabla precalculada, es decir, 𝑔𝑔 𝑧𝑧 = 𝑧𝑧𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙 = 𝑔𝑔(𝜓𝜓), 𝑔𝑔𝜑𝜑 = 𝜑𝜑𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙 = 𝑓𝑓(𝜓𝜓) y 𝑔𝑔 𝑦𝑦 = 𝑦𝑦𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙 = 𝑔𝑔(𝜓𝜓). 𝐶𝐶1 → 𝐶𝐶2 → 𝐶𝐶3 → 𝑦𝑦𝑒𝑒𝑒𝑒𝑒𝑒 − 𝑔𝑔 𝑦𝑦 = 0 (6.8. 𝑎𝑎) 𝜑𝜑𝑒𝑒𝑒𝑒𝑒𝑒 − 𝑔𝑔𝜑𝜑 = 0 (6.8. 𝑐𝑐) 𝑧𝑧𝑒𝑒𝑒𝑒𝑒𝑒 − 𝑔𝑔 𝑧𝑧 = 0 0 1 𝑪𝑪𝒒𝒒 = �0 0 0 0 0 0 1 0 0 1 0 6.3.2.2. (6.8. 𝑏𝑏) 𝑦𝑦 0 −𝑔𝑔𝜓𝜓 0 −𝑔𝑔𝜓𝜓𝑧𝑧 � 0 𝜑𝜑 −𝑔𝑔𝜓𝜓 𝑦𝑦 0 −𝑔𝑔𝜓𝜓𝜓𝜓 𝜓𝜓̇ 𝑧𝑧 𝜓𝜓̇� 0 0 0 0 −𝑔𝑔𝜓𝜓𝜓𝜓 𝜑𝜑 0 0 0 0 −𝑔𝑔𝜓𝜓𝜓𝜓 𝜓𝜓̇ 0 0 0 0 𝑪𝑪𝒒𝒒̇ = �0 (6.8) 𝑪𝑪(𝒒𝒒) = 𝟎𝟎 (6.9) (6.10) GRÁFICAS TABLA PRECALCULADA 2GL Como consecuencia de la tipología de tipo de contacto visto en el apartado 6.2, existen 3 diferentes tablas precalculadas para la determinación de los puntos de contacto entre rueda y carril que son llanta, flanco y en remonte de rueda. La representación gráfica de las variables almacenadas en la tabla tanto de coordenadas como de derivadas numéricas se muestra en la figura 6.6 y 6.7. 63 MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA Figura 6.6. Evolución de parámetros de contacto en tablas llanta flanco y remonte En la figura 6.6, se muestra la evolución de los 4 parámetros de contacto de la rueda carril en función de la variable 𝑦𝑦 y 𝜑𝜑. Se pueden observar 2 superficies para cada gráfica. Esto representa la evolución de la variable tanto en la tabla llanta como en la tabla remonte, siendo la línea que las corta el valor de la variable en la tabla flanco que al tener un sólo grado de libertad, se representa como una curva y que está contenida en las dos superficies. De igual forma en la figura 6.7 se muestra la evolución de la coordenada vertical 𝑧𝑧 del eje ferroviario y del 𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 tanto en llanta como en remonte y se puede apreciar cómo ambas superficies intersecan en tabla de contacto flanco. 64 6 - TABLAS PRECALCULADAS PARA PUNTOS DE CONTACTO Figura 6.7. Evolución 𝑧𝑧 y 𝜓𝜓 del eje ferroviario en tabla precalculada. En la figura 6.8. se muestra la evolución de la derivada por diferencias finitas de las coordenadas vertical y 𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 con respecto al ángulo de 𝑦𝑦𝑦𝑦𝑦𝑦. Figura 6.8. Derivadas numéricas 𝜕𝜕𝜕𝜕 𝜕𝜕𝜕𝜕 y 𝜕𝜕𝜕𝜕 𝜕𝜕𝜕𝜕 65 MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA 6.3.2.3. SIMETRÍA TABLA PRECALCULADA 2GDL Las relaciones de simetría y antisimetría en la tabla precalculada de 2 grados de libertad se caracterizan por depender del tipo de coordenada y cuadrante sobre el que aplicar la relación. Las tablas 6.3 muestran las relaciones entre los parámetros de cada cuadrante con respecto al calculado del primer cuadrante (figura 6.4). Cabe recalcar en la notación que los superíndices 𝑟𝑟 y 𝑤𝑤 hacen referencia a raíl y rueda, mientras que 𝐿𝐿 y 𝑅𝑅 a izquierda y derecha respectivamente. Tabla 6.9.a Relaciones de simetría y antisimetría tabla llanta precalculada de 2GDL. En las tablas 6.3 se puede observar cómo entre los primeros 8 parámetros de la tabla, correspondientes a los contactos izquierdo y derecho, las relaciones existentes hacen que se puedan permutar valores entres unos y otros, mientras que los 8 restantes correspondientes a las derivadas numéricas, solamente pueden cambiar su signo con respecto al original. 66 6 - TABLAS PRECALCULADAS PARA PUNTOS DE CONTACTO Figura 6.9.b. Relaciones de simetría y antisimetría tabla remonte precalculada de 2GDL Como se ha expuesto en 6.3.2.2, la tabla flanco sólo dispone de una variable independiente que se ha escogido como el 𝑦𝑦𝑦𝑦𝑦𝑦 o 𝜓𝜓. Por tanto, sólo se calculan las derivadas de 𝑦𝑦 𝜑𝜑 𝑦𝑦 𝜑𝜑 𝑧𝑧 , 𝑓𝑓𝜓𝜓𝜓𝜓 , que se las variables dependientes con respecto a 𝜓𝜓, es decir, 𝑓𝑓𝜓𝜓 , 𝑓𝑓𝜓𝜓𝑧𝑧 , 𝑓𝑓𝜓𝜓 , 𝑓𝑓𝜓𝜓𝜓𝜓 , 𝑓𝑓𝜓𝜓𝜓𝜓 muestran en la tabla 6.3.c. 67 MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA Figura 6.9.c. Relaciones de simetría y antisimetría tabla flanco precalculada de 2GDL 6.3.3. TABLA PRECALCULADA CON 1 GDL Tal y como se ha visto en el apartado 6.3, los pequeños valores del ángulo de 𝜓𝜓 permiten eliminar la dependencia de la tabla precalculada con ésta variable y por tanto, reducir el número de entradas de la tabla de 2 a 1. 𝑧𝑧 ≈ 𝑓𝑓 𝑧𝑧 (𝑦𝑦, 0 ) = 𝑓𝑓 𝑧𝑧 (𝑦𝑦) 𝜑𝜑 ≈ 𝑓𝑓 𝜑𝜑 (𝑦𝑦, 0 ) = 𝑓𝑓 𝜑𝜑 (𝑦𝑦) (6.11. 𝑎𝑎) (6.11. 𝑏𝑏) El procedimiento para generar la tabla precalculada con 1 sólo grado de libertad, es similar al de 2 grados de libertad y se esquematiza en la figura 6.10. 68 6 - TABLAS PRECALCULADAS PARA PUNTOS DE CONTACTO COORDENADAS EJE FERROVIARIO COORDENADAS INDEPENDIENTES COORDENADAS DEPENDIENTES 𝒒𝒒 = [𝑥𝑥 𝑦𝑦 𝑧𝑧 𝜑𝜑 𝜃𝜃 𝜓𝜓 ]𝑻𝑻 𝒒𝒒𝒊𝒊𝒊𝒊𝒊𝒊 = [ 𝑥𝑥 𝑦𝑦 𝜃𝜃 ]𝑻𝑻 𝑥𝑥, 𝜃𝜃, 𝜓𝜓 → irrelevantes 𝒒𝒒𝒅𝒅𝒅𝒅𝒅𝒅 = [ 𝑧𝑧 𝜑𝜑 ]𝑻𝑻 OBTENER PARÁMETROS DE CONTACTO 𝒔𝒔𝒘𝒘 𝟏𝟏 , GRADOS DE LIBERTDAD 𝑦𝑦 𝒔𝒔𝒘𝒘 𝟐𝟐 , 𝒔𝒔𝒓𝒓𝟏𝟏 , 𝒔𝒔𝒓𝒓𝟐𝟐 CALCULO DE LAS DERIVADAS NUMÉRICAS DE LAS COORDENADAS ALMACENAR TABLA PRECALCULADA CÁLCULO COORDENADAS DEPENDIENTES CONOCIDAS LAS COORDENADAS DEL EJE 𝑧𝑧 = 𝑓𝑓 𝑧𝑧 (𝑦𝑦) 𝜑𝜑 = 𝑓𝑓 𝜑𝜑 (𝑦𝑦) FIN Figura 6.10. Generación tabla precalculada con 1 GDL 6.3.3.1. DERIVADAS NUMÉRICAS PARA TABLA DE 1 GDL Al igual que en el caso de la tabla precalculada con 2 grados de libertad, es necesario el cálculo de las derivadas de las coordenadas de posición del eje ferroviario debido al sistema de ecuaciones del movimiento de la expresión 6.3. Existen nuevamente dos posibilidades a tratar. Situación de contacto en llanta o remonte, ó situación de contacto en flanco. 6.3.3.1.1. RESTRICCIONES Y DERIVADAS NUMÉRICAS EN SITUACIÓN DE CONTACTO EN LLANTA O REMONTE Siguiendo el mismo procedimiento que en el apartado 6.3.2.1 siendo 𝑪𝑪(𝒒𝒒) el vector de restricciones y 𝑓𝑓 𝑧𝑧 y 𝑓𝑓, la coordenada vertical y el roll obtenidos de la tabla precalculada y 𝑪𝑪𝒒𝒒 y 𝑪𝑪𝒒𝒒̇ como el jacobiano de las restricciones y la derivada temporal del mismo. 69 MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA 𝑧𝑧𝑒𝑒𝑒𝑒𝑒𝑒 − 𝑓𝑓 𝑧𝑧 = 0 𝐶𝐶1 → 0 −𝑓𝑓𝑦𝑦𝑧𝑧 0 𝑪𝑪𝒒𝒒̇ = � (6.12. 𝑎𝑎) 𝜑𝜑𝑒𝑒𝑒𝑒𝑒𝑒 − 𝑓𝑓 𝜑𝜑 = 0 𝐶𝐶2 → 𝑪𝑪𝒒𝒒 = � (6.12) 𝑪𝑪(𝒒𝒒) = 𝟎𝟎 𝜑𝜑 −𝑓𝑓𝑦𝑦 1 0 0 0 � 0 1 0 0 𝑧𝑧 𝑦𝑦̇ 0 −𝑓𝑓𝑦𝑦𝑦𝑦 0 𝜑𝜑 −𝑓𝑓𝑦𝑦𝑦𝑦 𝑦𝑦̇ 0 0 0 0 0 0 (6.12. 𝑏𝑏) (6.13) 0 � 0 (6.14) Siendo el cálculo de las derivadas numéricas mediante diferencias finitas centrales según la expresión 6.7. 6.3.3.1.2. RESTRICCIONES Y DERIVADAS NUMÉRICAS EN SITUACIÓN DE CONTACTO EN FLANCO En la situación de contacto en flanco en donde existen 3 puntos de contacto en el eje, se elimina un grado de libertad. Esto quiere decir que la posición del eje en este estado es fija y por tanto no depende de ninguna variable. 6.3.3.2. GRÁFICAS TABLAS PRECALCULADAS CON 1 GDL. Al igual que en las tablas precalculadas con 2 grados de libertad, existen las mismas tres regiones sobre las que se puede localizar el contacto entre rueda y carril que son el contacto en llanta, flanco y remonte. En este caso, al tratarse de un problema de un grado de libertad, la evolución de los parámetros de contacto y de las derivadas numéricas almacenadas en la tabla precalculada pueden mostrarse en figuras 2D. 70 6 - TABLAS PRECALCULADAS PARA PUNTOS DE CONTACTO Figura 6.11. Evolución de los parámetros de contacto en llanta, flanco y remonte 1GDL. En la figura 6.11 se muestra la evolución de los 4 parámetros del contacto rueda carril en función de la variable 𝑦𝑦. En la figura 6.12 se muestra la evolución de la coordenada vertical 𝑧𝑧 del eje ferroviario y del 𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 tanto en llanta como en remonte y se puede apreciar claramente la transición entre llanta y remonte pasando por el flanco. Se trata en realidad de una sección a 𝜓𝜓 = 0 de las superficies de la figura 6.6. Por último, en la figura 6.13 se muestra la evolución de las derivadas numéricas de la coordenada vertical y del roll con respecto al desplazamiento lateral. 71 MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA Figura 6.12. Evolución coordenada vertical y roll en tablas llanta, flanco y remonte 1GDL 𝜑𝜑 Figura 6.13. Evolución de 𝑓𝑓𝑦𝑦𝑧𝑧 y de 𝑓𝑓𝑦𝑦 en tabla llanta. 6.3.3.3. SIMETRÍA TABLA PRECALCULADA 1 GDL Las relaciones de simetría y antisimetría en la tabla precalculada de un grado de libertad se simplifican con respecto al caso de dos grados de libertad en reducirse a sólo dos posibles casos dependiendo del signo de la coordenada lateral del eje 𝑦𝑦. La tabla 6.10 a y b, muestran las relaciones entre los parámetros de contacto y derivadas numéricas para los posibles casos estudiados. 72 6 - TABLAS PRECALCULADAS PARA PUNTOS DE CONTACTO Tabla 6.10.a. Simetría en tabla llanta 1 GDL. Tabla 6.10.b. Simetría en tabla remonte 1 GDL. 73 MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA 74