Álgebra lineal y Geometrı́a I
Gloria Serrano Sotelo
Departamento de MATEMÁTICAS
CLASIFICACIÓN AFÍN DE CÓNICAS
Sea E un R-espacio vectorial de dimensión 3.
Sean E∞ = he1 , e2 i un plano vectorial de E y e0 un vector de E que no está en E∞ ,
e0 ∈
/ E∞ .
Los vectores {e0 , e1 , e2 } forman una base de E, y si representamos por (x0 , x1 , x2 ) sus
funciones coordenadas, el plano afı́n H definido por
H = e0 + E∞
tiene por ecuación implı́cita x0 = 1. En este sistema de coordenadas la ecuación implı́cita
del plano del infinito E∞ es x0 = 0.
Definición 1. Una cónica de H es una familia C = {λT2 } (λ ∈ R), formada por una métrica
simétrica T2 sobre E y todas sus proporcionales.
El lugar geométrico definido por la cónica C es la intersección del plano afı́n H con el
conjunto de los vectores de E que son isótropos para la métrica T2
locus de C = {e ∈ E : T2 (e, e) = 0} ∩ H
En coordenadas, el locus de C representa la ecuación de una curva de grado 2 de H. En
efecto, si G = (gij ) es la matriz de un representante T2 de la cónica C respecto de una base
{e0 , e1 , e2 } de E en la que la ecuación de H es x0 = 1, se tiene
1
g
g
g
00
01
02
locus de C = (1, x1 , x2 ) ∈ H : 1 x1 x2 g10 g11 g12 x1 = 0 ,
g20 g21 g22
x2
de donde resulta
g11 x21 + g22 x22 + 2(g12 x1 x2 + g12 x1 x2 ) + 2(g01 x1 + g02 x2 ) + g00 = 0 .
Observación 1. La parte cuadrática de esta ecuación, g11 x21 + g22 x22 + 2(g12 x1 x2 + g12 x1 x2 ),
se corresponde con la matriz de la restricción de la métrica T2 al plano del infinito E∞ ,
g11 g12
T2|E∞ =
gn1 g22
Ejemplo 1.
1 −3 2
H = {(1, x, y)} ⊂ R3 , C = {λT2 } , G = −3 1 1
2
1 2
1
1 −3 2
El locus de C ≡ 1 x y −3 1 1 x = 0,
2
1 2
y
es la curva de grado dos del plano XY : x2 + 2y 2 + 2xy − 6x + 4y + 1 = 0 .
1
2
G. Serrano Sotelo
Definición 2. Una cónica C = {λT2 } es irreducible o no degenerada si lo es cualquiera de
sus métricas representantes.
Ejemplo 2. Las cónicas de ecuaciones
x2 y 2
x2 y 2
(a) 2 + 2 − 1 = 0 , (b) 2 − 2 − 1 = 0 , (c) y 2 − 2px = 0 , donde a, b, p ∈ R − {0}
a
b
a
b
son irreducibles pues las métricas representantes, de matrices
−1
0
0
−1
0
0
0 −1 0
0 , (b) 0 1/a2
0 , (c) −1 0
0 ,
(a) 0 1/a2
2
2
0
0
1/b
0
0
−1/b
0
0 1/p
son no singulares.
Definición 3. Un vector e0 ∈ E define un centro de la cónica C si e0 ∈
/ E∞ y T2 (e0 , e) = 0
para todo e ∈ E∞ .
Proposición 1. Si C = {λT2 } es una cónica irreducible y tiene centro éste es único.
Demostración. Sea e0 ∈ E un vector que define un centro de la cónica C.
⊥
,
Como T2 es una métrica irreducible el subespacio ortogonal al hiperplano del infinito, E∞
es una recta, luego e0 es un generador de ella pues es ortogonal a E∞ , y como e0 ∈
/ E∞ esta
recta he0 i corta a H en un único punto, c = he0 i ∩ H, que es el centro de la cónica.
Corolario 1. Si C = {λT2 } es una cónica irreducible con centro existe una base {e0 , e1 , e2 }
de E en la que las coordenadas del centro son
Adj g10 Adj g20 c = 1,
,
,
Adj g00 Adj g00
donde G = (gij ) es la matriz, respecto de esa base, de una métrica representante de C .
Demostración. Respecto de la base {e0 , e1 , e2 } de E, en la que e0 es el vector que define el
⊥
= he0 i, y {e1 , e2 } una base de E∞ , la ecuación implı́cita de E∞ es x0 = 0, luego
centro, E∞
su subespacio incidente está generado por la forma lineal ω de coordenadas en la base dual
ω = (1, 0, 0).
⊥
Si G = (gij ) es la matriz de T2 en esta base se tiene que E∞
= hG−1 ωi = he0 i con
Adj g00 Adj g10 Adj g20
,
,
),
e0 =
|G|
|G|
|G|
luego el centro es
Adj g10 Adj g20
,
),
c = 1,
|G∞ |
|G∞ |
donde Adj g00 = |G∞ | es el determinante de la restricción de G a E∞ .
Definición 4. Sea C = {λT2 } una cónica de H. Se llaman rango r e ı́ndice i de la cónica a los
de cualquiera de las métricas que la representan. Se llaman rango r∞ e ı́ndice i∞ de la cónica
en el infinito a los de la restricción a E∞ de cualquiera de las métricas que la representan.
r = rg(T2 ) , i = indice (T2 ) ;
r∞ = rg(T2|E∞ ) , i∞ = indice (T2|E∞ )
Teorema 1. La condición necesaria y suficiente para que dos cónicas C = {λT2 } y C 0 =
{µT20 } de H sean afı́nmente equivalentes es que tengan iguales sus rangos, ı́ndices, rangos
en el infinito e ı́ndices en el infinito,
r = r 0 , i = i0 ;
0
r∞ = r∞
, i∞ = i0∞ .
Clasificación afı́n de cónicas
3
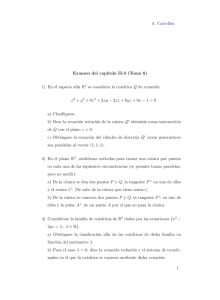
Utilizando este teorema obtenemos el siguiente cuadro de:
Clasificación afı́n de cónicas en H ⊂ R3
r
r∞ i∞ \i
1
3 (Irreducibles)
1
2
0
1
0
1
0
0
0
Par de rectas
reales
no paralelas
Hipérbola
x2 − y 2 = 1
x2 − y 2 = 0
2
0
1
0
0
0
Par de rectas
imaginarias
no paralelas
x2 + y 2 = 0
Elipse
Elipse
real
imaginaria
x2 + y 2 = 1 x2 + y 2 = −1
Parábola
y 2 = 2x
Par de rectas Par de rectas
Recta real
reales
imaginarias
doble
paralelas
paralelas
2 =0
x
x2 = 1
x2 = −1
Recta real
x=0
Conjunto
vacı́o
Plano
afı́n
Problemas resueltos
1. Clasificar afı́nmente las cónicas siguientes
(a) x2 − 2xy + y 2 + 4x − 6y + 1 = 0
(b) x2 + 4xy + 4y 2 − 2x − 4y − 3 = 0
Solución.
(a) Escribamos la matriz G de la métrica T2 y la matriz G∞ de su restricción al infinito
1
2 −3
1 −1
1 −1 ; G∞ =
G= 2
−1 1
−3 −1 1
Calculemos el número de raı́ces nulas r0 , el número de raı́ces positivas r+ y el número de
raı́ces negativas r− de la ecuación secular de la métrica T2 y de la métrica T2 |E∞
• p(x) = |xI − G| = x3 − 3x2 − 11x + 1 , r0 (p(x)) = 0 , r+ (p(x)) = 2 , r− (p(x)) = 1
• p∞ (x) = |xI − G∞ | = x2 − 2x , r0 (p∞ (x)) = 1 , r+ (p∞ (x)) = 1 , r− (p∞ (x)) = 0
Luego los rangos y los ı́ndices de T2 y de su restricción al infinito son
r = 3, i = 1;
r∞ = 1 , i∞ = 0
0 −1 0
Por tanto, es una cónica irreducible sin centro de matriz reducida −1 0 0 y ecuación
0
0 1
2
reducida afı́n y − 2x = 0, esto es, una Parábola.
4
G. Serrano Sotelo
(b)
−3 −1 −2
2
G = −1 1
−2 2
4
;
G∞ =
1 2
2 4
• p(x) = |xI − G| = x3 − 2x2 − 20x , r0 (p(x)) = 1 , r+ (p(x)) = 1 , r− (p(x)) = 1
• p∞ (x) = |xI − G∞ | = x2 − 5x , r0 (p∞ (x)) = 1 , r+ (p∞ (x)) = 1 , r− (p∞ (x)) = 0
Los rangos y los ı́ndices de la métrica T2 y de su restricción al infinito son
r = 2, i = 1;
r∞ = 1 , i∞ = 0
−1 0 0
Es una cónica degenerada con centro, de matriz reducida 0 1 0 y ecuación reducida
0 0 0
2
afı́n x − 1 = 0, que representa una Par de rectas reales y paralelas.
2. Calcular el centro, los ejes principales y la ecuación reducida métrica de la curva de grado dos
del plano real de ecuación
3x2 + 3y 2 − 2xy + 2x − 4y + 1 = 0
Solución.
Sea G la matriz de una métrica T2
infinito.
1
G= 1
−2
representante de la cónica en H ⊂ R3 y G∞ su restricción al
1 −2
3
−1
3 −1 ; G∞ =
−1 3
−1 3
|xI − G| = x3 − 7x2 + 9x + 3
;
|xI − G∞ | = (x − 2)(x − 4)
Se tiene
r = 3
i = 1
Cónica irreducible con centro: x2 + y 2 = 1 (Elipse real )
r∞ = 2
i∞ = 0
1 5
(a) Centro de la elipse= − , )
8 8
Por el Corolario 1,
c = 1,
Adj g10 Adj g20
1 5
,
) = (1, − , )
|G∞ |
|G∞ |
8 8
(b) Calculemos una base ortonormal de diagonalización para G∞ .
ker(G∞ − 2I) = h(0, 1, 1)i ; ker(G∞ − 4I) = h(0, 1, −1)i
1
1
{u1 = √ (0, 1, 1), u2 = √ (0, 1, −1)} es la base buscada.
2
2
(c) En la base {c, u1 , u2 } la matriz de T2 es
T2 (c, c) 0 0
3
0
2 0 , con T2 (c, c) = −
8
0
0 4
Luego la ecuación reducida métrica de la elipse es
x̄2
ȳ 2
+
= 1,
3/16 3/32
donde x̄ y ȳ son las coordenadas asociadas a la base {u1 , u2 }.
Clasificación afı́n de cónicas
5
(d ) Ecuaciones de la transformación afı́n efectuada para pasar del sistema de referencia inicial
en H, en el que las coordenadas son {x, y}, al sistema de referencia de origen c y ejes las
rectas c + hu1 i , c + hu2 i , respecto del que las coordenadas son {x̄, ȳ}.
1 1 1
,
Si B representa la matriz del cambio de base realizado en E∞ , esto es B = √
2 1 −1
componiendo el automorfismo de cambio de base con la traslación de vector c se obtienen
las ecuaciones
1
x̄ = √ (x + y − 48 )
x
x̄
−1/8
2
=B
+
=⇒
1
y
ȳ
5/8
ȳ = √ (x − y + 68 )
2
(e) Los ejes principales de la elipse son las rectas c + hu1 i , c + hu2 i de ecuaciones respectivas
4
6
= 0 ; x̄ = 0 ⇒ x + y − = 0
8
8
(f ) Las medidas sobre los semiejes, a y b, la excentricidad y los focos F y F 0 de la elipse,
respecto del sistema de referencia inicial, son
r
r
3
3
; b=
a=
16
32
r
√
p
3
c
2
2
2
=⇒ Excentricidad = =
c= a −b =
32
a
2
r
√
√
3
3−1 3+5
F̄ = (
, 0) =⇒ F = (
,
)
32
8
8
r
√
√
3
− 3−1 − 3+5
F̄ 0 = (−
, 0) =⇒ F 0 = (
,
)
32
8
8
ȳ = 0 ⇒ x − y +
3. Calcular el vértice, los ejes principales, la ecuación reducida métrica, el foco y la directriz de la
parábola del ejemplo 1
x2 − 2xy + y 2 + 4x − 6y + 1 = 0
Solución.
Sean G y G∞ como en el ejemplo anterior.
1
2 −3
1 −1
G= 2
−3 −1 1
;
G∞ =
1 −1
−1 1
0 α 0
Tenemos que encontrar una base {e, v1 , v2 } en la que la matriz de T2 es de la forma α 0 0
0 0 β
con α , β 6= 0. El vector e define el vértice de la parábola y {v1 , v2 } es una base ortonormal de
diagonalización para G∞ .
(a) Calculemos v1 y v2 .
0 0
|xI − G∞ | = x(x − 2) ⇒ Forma diagonal
⇒β=2
0 2
1
ker G∞ ≡ x − y = 0 ⇒ v1 = √ (0, 1, 1)
2
1
ker(G∞ − 2I) ≡ x + y = 0 ⇒ v2 = √ (0, 1, −1)
2
6
G. Serrano Sotelo
31 11
,− )
8
8
El vector e que define el vértice está en H, luego sus coordenadas son e = (1, x, y), y
verifica las condiciones T2 (e, e) = 0 , T2 (e, v1 ) = α y T2 (e, v2 ) = 0 .
Calculemos x e y resolviendo el sistema determinado por la primera y tercera condiciones
)
T2 (e, e) = 0 ⇒ x2 − 2xy + y 2 + 4x − 6y + 1 = 0
11
31 11
31
=⇒ e = (1, − , − )
x=− , y=−
8
8
8
8
T2 (e, v2 ) = 0 ⇒ 5 + 2x − 2y = 0
(b) Vértice de la parábola V = (−
(c) En la base {e, v1 , v2 } la matriz de T2 es
0
T2 (e, v1 ) 0
1
T2 (e, v1 )
0
0 , con T2 (e, v1 ) = − √ ,
2
0
0
2
1
luego la ecuación reducida métrica de la parábola es ȳ 2 = √ x̄ , donde x̄ y ȳ son las
2
coordenadas asociadas a la base {v1 , v2 }.
(d ) Ecuaciones de la transformación afı́n efectuada para pasar del sistema de referencia inicial
en H, en el que las coordenadas son {x, y}, al sistema de referencia de origen e y ejes las
rectas e + hv1 i , e + hv2 i , respecto del que las coordenadas son {x̄, ȳ}.
1 1 1
Si B representa la matriz del cambio de base realizado en E∞ , esto es B = √
,
2 1 −1
componiendo el automorfismo de cambio de base con la traslación de vector e se obtienen
las ecuaciones
1
x̄ = √ (x + y + 21
4 )
x
x̄
−31/8
2
=B
+
=⇒
1
y
ȳ
−11/8
ȳ = √ (x − y + 10
4 )
2
(e) Los ejes principales de la parábola son las rectas e + hv1 i , e + hv2 i de ecuaciones respectivas
10
21
Eje de simetrı́a ȳ = 0 ⇒ x − y +
= 0 ; x̄ = 0 ⇒ x + y +
=0
4
4
(f ) Calculemos por último el foco F y la directriz d de la parábola, respecto de las coordenadas
iniciales x e y.
1
1
Comparando la ecuación reducida métrica ȳ 2 = √ x̄ con ȳ 2 = 2px̄, resulta que p = √
2
2 2
y las coordenadas del foco y la ecuación de la directriz son (p/2, 0) y x̄ = −p/2.
En las coordenadas iniciales se tiene
30 10
F = (− , − ) ; d ≡ x + y + 5 = 0
8
8
Ejercicios Propuestos
4. Clasificar afı́nmente las cónicas siguientes:
(a) x2 + 2y 2 − 2x + 4y + 2 = 0
(b) x2 − 2xy + y 2 + 4x − 6y + 1 = 0
(c) 3x2 − 5xy + y 2 − x + 2y + 1 = 0
(d ) x2 + 4xy + 4y 2 − 2x − 4y = 3
(e) x2 + 2y 2 + 3xy + 2x + 5y − 3 = 0
(f ) x2 + y 2 + xy + x + y + 1 = 0
(g) x2 + y 2 − xy − x − y + 1 = 0
(h) x2 + 4y 2 + 4xy − 2x − 4y + 2 = 0
Clasificación afı́n de cónicas
7
5. Clasificar afı́nmente según los valores del parámetro λ la familia de cónicas siguiente:
x2 + (2λ2 + 1)y 2 − 2xy = 2λ2 − 3λ + 1
6. Calcular el centro, los ejes principales, la ecuación reducida métrica y la representación gráfica
de las curvas de grado dos siguientes:
3x2 − 2xy + 3y 2 + 2x − 4y + 1 = 0 ,
x2 − y 2 + 2xy − 6x + 4y + 3 = 0
7. Demostar que la curva plana de ecuación
4x2 + y 2 + 4xy + 6x + 1 = 0 ,
es una parábola. Calcular su vértice, eje principal, ecuación reducida métrica y representación
gráfica.
 0
0