Número de dientes de un mecanismo a chaveta desplazable
Anuncio

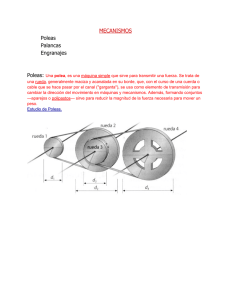
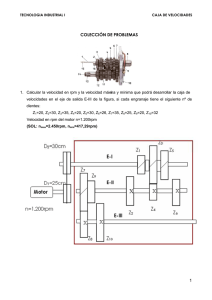
Introducción teórica Un mecanismo a chaveta desplazable consiste en un grupo de ruedas dentadas dispuestas en forma escalonada que acoplan o engranan con otro grupo similar. Uno de estos conjuntos es solidario (está enchavetado) al eje motriz y recibe su accionamiento a través de una polea. El otro conjunto está montado sobre un eje paralelo al primero y sus engranajes pueden girar libre e independiente sobre él. Tanto el eje conducido como los engranajes que van montados en él, están provistos de chaveteros por el que se desplaza una chaveta de forma especial, que permite (de acuerdo con la posición que tenga) solidarizar el eje conducido a una de las ruedas dentadas. De este modo pueden seleccionarse tantas velocidades de rotación de salida como pares de ruedas dentadas se disponga (5 en el caso de nuestra figura). El accionamiento de la chaveta desplazable se hace exteriormente por medio de horquillas y collarÃ-n. Siendo la distancia entre ejes (o entrecentros) de estos engranajes, común, se cumple que: O sea, que la semisuma de los diámetros primitivos para cada par de ruedas es igual (también podemos decir: la suma de los radios primitivos). Si reemplazamos los diámetros primitivos por su expresión equivalente: , o bien ; en donde o es el número de dientes del engranaje y es el módulo métrico, y sacamos factor común , tendremos: 1 Que simplificando resulta finalmente: condición que deben cumplir estos mecanismos en general, Cuando los conjuntos de engranajes conductores y conducidos se hacen iguales entre sÃ-, se tendrá además que: Por consideraciones análogas a las realizadas en los mecanismos de conos poleas y a las precedentes, resulta que: En conjuntos de engranajes iguales (o grupos de engranajes iguales), y por lo tanto con , la expresión (1) resulta: , o sea; con una relación de velocidad de 1:1, o directa. En cuanto a las relaciones de velocidades de los otros pares de ruedas y teniendo presente que , resultan: Enunciado del problema: Calcular el número de dientes de un mecanismo de chavetas desplazables de conjunto (o grupos) iguales, cuyo eje motriz gira a 2 , debiendo obtenerse en el eje conducido cinco marchas escalonadas geométricamente de razón . Se tiene dientes. Calcular: • Las relaciones de transmisión. • Las velocidades de rotación. • El número de dientes de cada engranaje. Desarrollo • Cálculo de las relaciones de transmisión • Cálculo de las velocidades de rotación • Cálculo del número de dientes de cada engranaje. 3 Por lo tanto: TecnologÃ-a de la Fabricación Comisión 1 b TPNº11 − Determinación del número de dientes de un mecanismo a chaveta desplazable Pág. 3 de 4 4