Kinematics of the Particle
Anuncio

Page: 0/13
September 2, 2011
Graduado en Ingeniería Aeroespacial
Mecánica Clásica
Cinemática de la Partícula
Jesús Peláez Álvarez
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 1/13
September 2, 2011
Kinematics of the Particle
R ELATIVIDAD DEL MOVIMIENTO
S ISTEMAS DE REFERENCIA
• Una característica esencial del movimiento es la
relatividad del mismo; si un sistema se mueve, las
distancias de sus puntos a los de una determinada
referencia cambian con el tiempo. Es preciso especificar la referencia adoptada a fin de evitar ambigüedades.
Se utilizarán referencia cartesianas
rectangulares, definidas sobre bases
ortonormales. Una vez fijada una
referencia
= {O; i, j, k} cada
punto P del espacio queda determinado por tres coordenadas, (x, y, z),
que son las coordenadas del vector
−−→
r = OP en la base (i, j, k)
• Ejemplo: un tren se mueve con velocidad constante sobre una vía rectilínea. Un viajero deja
caer un objeto por una ventanilla; la trayectoria
que observa, despreciando la resistencia del aire,
es una línea recta. La trayectoria que observa
una persona situada enfrente de la vía sobre la
que circula el tren es una parábola. Este ejemplo
muestra que las características y propiedades del
movimiento de un objeto dependen del sistema de
referencia desde el que se observa.
• El ámbito natural en el que se producen los
movimientos que estudia la cinemática es el espacio euclídeo tridimensional. Elementos clave de
estos espacios son las referencias cartesianas.
r = xi + y j + z k.
z
P
k
O
x
r
z
j
i
x
y
y
Dicho vector recibe el nombre de
vector posición, o también ra- F IGURA 2.1: Posición del punto P en
la referencia
Esta
diovector, del punto P .
ecuación constituye la expresión
formal de la biyección existente entre los puntos del espacio afín y
los vectores de R3 . Cada punto P tiene un único conjunto de coordenadas (x, y, z), y cada conjunto de coordenadas (x, y, z) esta asociado a
un único punto P de . La referencia se denomina, también, referencia
Oxyz . Con esta notación se indica el origen de la referencia y el nombre
que reciben las coordenadas que se miden a lo largo de sus tres ejes.
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Kinematics of the Particle
Page: 2/13
September 2, 2011
S ÓLIDO RÍGIDO
R EPOSO Y MOVIMIENTO
• En Mecánica se llama sólido rígido, o simplemente sólido, a todo sistema
material cuyos puntos mantienen invariables sus distancias mutuas. Los puntos geométricos de un espacio euclídeo satisfacen esta propiedad; se comportan,
por tanto, como los puntos de un sólido ideal que ocupara todo el espacio. Por
ello, el espacio en el que se mueve un partícula recibe el nombre de sólido de
referencia. No confundir con los sistemas coordenados o referencias cartesianas rectangulares. En un sólido de referencia dado hay muchos sistemas
coordenados diferentes.
• En Cinemática del Punto se analiza el movimiento de una
partícula respecto de una referencia
seleccionada previamente; se denomina posición del punto material M, en el instante t, al punto geométrico de la referencia que, en el instante
t, coincide con el punto material M. Así pues, la posición de
M es un punto de la referencia .
• En la naturaleza no existen sólidos rígidos. Bajo la acción de una fuerza,
cualquier objeto material experimenta una deformación y las distancias relativas entre sus partículas se alteran. Dependiendo del material y de la fuerza, la
deformación puede ser imperceptible o suficiente para producir su rotura. El
sólido rígido es un modelo ideal y nunca altera su forma incluso cuando se
somete a fuerzas de intensidad elevada.
• Una barra cilíndrica, por ejemplo, de acero, de un metro de longitud y 1 cm2
de sección, cuando se estira con una fuerza de 10000 Nw experimenta, aproximadamente, un alargamiento de 0.5 mm. Si la barra fuese de material menos
rígido la deformación sería mayor.
• Se dirá que el punto material M está en reposo respecto de
la referencia , si su posición no cambia con el tiempo; en
caso contrario, se dirá que el punto M está en movimiento. Por
tanto, cuando una partícula se mueve su posición cambia con el
tiempo.
• Estas definiciones se extienden sin dificultad a sistemas de
partículas. Así, un sistema está en reposo respecto de una referencia si, y sólo si, todas sus partículas están en reposo respecto de . Si al menos una partícula está en movimiento, se
dirá que el sistema está en movimiento respecto de .
• El modelo de sólido rígido se adapta perfectamente a objetos que experimentan deformaciones pequeñas cuando se mueven, como la barra de acero del
ejemplo anterior. En otros casos, la falta de rigidez del objeto puede provocar
efectos importantes y es necesario desarrollar análisis más complejos.
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 3/13
September 2, 2011
Kinematics of the Particle
C AMBIO DE SISTEMA COORDENADO
z
Considérese un punto P del espacio y dos referencias cartesianas rectangulares:
= {O; i, j, k} y 1 = {O ; u1 , u2 , u3 }. ¿Qué relación existe entre las
coordenadas (x, y, z) y las (x1 , x2 , x3 ) del mismo punto P ?
P
Se necesitan los siguientes datos: 1) las coordenadas (ξ, η, ζ) del punto O en la
referencia Oxyz
−−→
OO = ξi + η j + ζ k
donde la matriz Q es
⇒
O
u3
O
[ u1 , u2 , u2 ] = [i, j, k] Q
i
j
x3
y
x
F IGURA 2.2: Cambio de sistema coordenado
De la ecuación vectorial
La matriz Q que interviene es la matriz de cambio de base entre las bases
(i, j, k) y ( u1 , u2 , u3 ) de las referencias Oxyz y O x1 x2 x3 . Ambas
bases son ortonormales y la matriz Q es ortogonal, esto es, satisface la
relación:
QT · Q = I ⇔ Q−1 = QT
−−→
(r = OO + ρ)
se deducen trivialmente las ecuaciones buscadas:
x1
ξ
x
y = η + Q x2
ζ
z
x3
u1
r
k
⎛
⎞
q11 , q21 , q31
Q = ⎝q12 , q22 , q32 ⎠
q13 , q23 , q33
−−→ −−→ −−→
OP = OO + O P
u2
ρ
y, 2) las coordenadas de los versores ( u1 , u2 , u3 ) en la referencia Oxyz
⎫
u1 = q11i + q12 j + q13 k⎪
⎬
u2 = q21i + q22 j + q23 k
⎪
⎭
u3 = q31i + q32 j + q33 k
x1
x2
(2.1)
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 4/13
September 2, 2011
Kinematics of the Particle
T RAYECTORIA
L EY H ORARIA
Trayectoria: el lugar geométrico
z
de las posiciones ocupadas por el
punto M en los sucesivos instantes
M, t
de tiempo. La trayectoria es un elemento geométrico (una curva) ligada
al sólido de referencia en el que se
z(t)
mueve la partícula. Si se cambia de
y
sistema coordenado, la trayectoria no
O
cambia, aunque, obviamente, sus ecuax(t)
ciones paramétricas cambiarán.
En ocasiones se introducen sistemas
y(t)
de coordenadas móviles respecto del
x
sólido de referencia. En tal caso,
es imprescindible considerar el sisF IGURA 2.3: Trayectoria. Ecuaciones
tema móvil como un sólido diferente
horarias del movimiento de M.
del sólido de referencia, pues hay dos
movimientos diferentes en juego. La partícula M describirá trayectorias diferentes
en ambos sólidos y es preciso distinguirlas con claridad.
Además de las ecuaciones horarias, hay otras alternativas para describir el movimiento de M. En efecto, las ecuaciones (2.2) constituyen la representación paramétrica de una curva, y si en ellas se
realiza un cambio de parámetro definido por la ecuación
E CUACIONES H ORARIAS
El movimiento de M respecto de la referencia Oxyz está determinado si se conocen
las tres coordenadas de su posición en cada instante de tiempo t:
x = x(t), y = y(t), z = z(t)
o en forma condensada r = r(t)
(2.2)
Las ecuaciones (2.2) se denominan ecuaciones horarias del movimiento; intervienen en el análisis, bien como dato conocido de partida, bien como incógnita
fundamental a determinar.
t = ϕ(u)
o su inversa
u = ψ(t)
(2.3)
y = g(u),
z = h(u)
(2.4)
adoptan la forma
x = f (u),
y constituyen una representación paramétrica diferente de la misma
curva. Es posible describir el movimiento de la partícula mediante las
ecuaciones (2.3) y (2.4).
El movimiento se separa, entonces, en sus dos elementos constitutivos
esenciales: por una parte la trayectoria (dada por (2.4)) y, por otra
parte, la ley horaria (dada por (2.3)). La ley horaria expresa la forma
en que el móvil recorre su trayectoria, esto es, si lo hace despacio o
deprisa, si oscila o no, etc.
Si se fija la trayectoria (2.4), se obtienen movimientos diferentes cambiando la ley horaria (2.3). La trayectoria es independiente de la
ley horaria y no se altera cuando ésta cambia. Los elementos del
movimiento que gozan de esta propiedad, se denominan elementos
geométricos. La trayectoria es, pues, un elemento geométrico del
movimiento. El parámetro u, independientemente de su significado,
si es que lo tiene, representa una coordenada intrínseca de la trayectoria.
Las ecuaciones horarias constituyen una representación paramétrica
de la trayectoria, privilegiada, desde el punto de vista de la Cinemática, al utilizar el tiempo como parámetro.
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 5/13
September 2, 2011
Kinematics of the Particle
Si se dispone del movimiento a través de la trayectoria —en función de un
parámetro u— y de la ley horaria la velocidad está dada por
V ECTOR VELOCIDAD
Sea r(t) = xi + y j + z k el vector posición de la partícula M respecto de
la referencia Oxyz. Se supondrá que las ecuaciones horarias r = r(t) del
movimiento de M son conocidas.
Se define la velocidad instantánea de M en el instante t, como la derivada
temporal de su vector posición r(t). Por tanto se tendrá:
v(t) = ẋi + ẏ j + ż k
dx
(t),
dt
ẏ =
dy
(t),
dt
ż =
dz
(t)
dt
La velocidad instantánea, o el vector velocidad o, simplemente, la velocidad de la partícula, es una propiedad local del movimiento y cambia
con la partícula a lo largo de su trayectoria. Si se cambia el sistema coordenado v no cambia, aunque sus coordenadas cambiarán. El origen de v
es la posición de M en el instante t, su recta de acción es la tangente a la
trayectoria en M, su sentido el del movimiento y su módulo se obtiene de
(2.5)
v = ẋ2 + ẏ 2 + ż 2
Para llegar a (2.5) se ha ha derivado el vector posición r(t) considerando
constantes los versores (i, j, k) de Oxyz. De dicha derivada temporal
se dice que es la derivada en la referencia Oxyz o, también, la derivada
efectuada por un observador ligado a Oxyz.
dr
dr
=
(u) u̇
dt
du
dr(t)
El vector
, tangente a la trayectoria en M, en general no es unitario.
du
Si el parámetro u es un parámetro longitud de arco, se tendrá
(2.5)
Nos adherimos a la costumbre de situar un punto · encima de una variable
para indicar su derivada temporal. En (2.5) se sigue ya este convenio y en
ella las variables ẋ, ẏ, ż simbolizan las derivadas
ẋ =
v(t) =
v(t) =
dr
dr
=
(s) ṡ = ṡ t
dt
ds
(2.6)
ahora bien, al ser el vector t unitario se deduce que
v = ṡ
(2.7)
Este resultado evoca la definición elemental de velocidad (el espacio recorrido dividido por el tiempo invertido), salvo que ahora el espacio ha de
medirse a lo largo de la trayectoria seguida por M. La ecuación (2.6)
muestra que las coordenadas intrínsecas de v, esto es, las coordenadas
en el triedro intrínseco (t, n, b), son (ṡ, 0, 0). Obviamente s y t son elementos geométricos del movimiento, pues no dependen de la ley horaria
con la que se desarrolle.
En (2.7) se supone que v y t tienen el mismo sentido. En movimientos
con puntos de parada —una oscilación armónica en una recta— si se obliga
a que v y t tengan el mismo sentido, t sufriría discontinuidades en los
puntos de parada. Es preferible fijar un sentido para t, mantenerlo durante
el movimiento, y admitir que en (2.7) ṡ puede ser negativa; v no sería,
entonces, el módulo de la velocidad sino su valor algebraico, esto es, el
módulo con un signo que indica el sentido de v.
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 6/13
September 2, 2011
Kinematics of the Particle
H ODÓGRAFA
Si los diferentes vectores velocidad se trasladan paralelamente a sí
mismos hasta que su punto de aplicación coincida con el origen O
de la referencia, sus extremos describen una curva que recibe el
nombre de hodógrafa de velocidades o, simplemente, hodógrafa.
Las ecuaciones paramétricas de la hodógrafa son
ẋ = ẋ(t),
ẏ = ẏ(t),
4
y, ẏ
ż = ż(t).
Aunque el espacio en el que se sitúa la hodógrafa es el de la referencia Oxyz , para evitar confusiones suelen introducirse unos
ejes Oẋẏ ż que coinciden con los ejes de la referencia Oxyz . De
esta forma sobre el eje Ox se miden longitudes y sobre el Oẋ velocidades. En ocasiones la referencia Oẋẏ ż se denomina espacio
hodógrafo.
La hodógrafa hereda algunas propiedades del movimiento. Por
ejemplo, si la trayectoria es plana, la hodógrafa es una curva plana.
El recíproco, sin embargo, es falso, esto es, el hecho de que la
hodógrafa sea una curva plana no lleva aparejado que la trayectoria
lo sea. Un ejemplo de esta situación se tiene en una hélice circular que se recorre con velocidad constante. La hodógrafa es una
circunferencia, por tanto es plana, mientras que la trayectoria es alabeada. En ocasiones, si se conoce la hodógrafa se pueden deducir
propiedades interesantes del movimiento.
3
1
4
2
Hodógrafa
O
1
F IGURA 2.4: Hodógrafa
x, ẋ
de velocidades
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 7/13
September 2, 2011
Kinematics of the Particle
ACELERACIÓN
La aceleración instantánea de M en el instante t se define como la
derivada temporal del vector velocidad v(t), y como la derivada segunda del vector posición r(t). Por tanto, se tendrá
γ (t) = ẍi + ÿ j + z̈ k.
(2.8)
La aceleración instantánea, el vector aceleración o, simplemente, la
aceleración de M, es una propiedad local de la trayectoria. Es un vector
de la referencia Oxyz en la que se mueve el punto y se considera ligado
a la posición de M en la que se calcula. Si se parte de las componentes
intrínsecas de v = ṡ t se tendrá
γ =
La aceleración es la derivada temporal de la velocidad, y mide el cambio de la velocidad cuando el tiempo cambia. El vector v tiene módulo
v, dirección y sentido t. Por consiguiente, v cambiará si cambia su
módulo v o su dirección t. Los cambios en el módulo v se traducen
en aceleración tangencial de la partícula. Los cambios en la dirección t se traducen en aceleración normal (dirigida siempre hacia la
concavidad).
d (ṡ t) = s̈ t + ṡ ˙t
dt
pero, de acuerdo con la primera fórmula de Frenet
d
t = k n
ds
⇒
b
˙t = ṡk n
n
siendo k la curvatura de la trayectoria en la posición ocupada por la
partícula M. Se tiene así
γ (t) = s̈ t + ṡ2 k n = v̇ t + v 2 k n.
γ
γ t = s̈t
M
(2.9)
t
Por tanto, las componentes intrínsecas de la aceleración son (v̇, v 2 k, 0).
La aceleración está contenida en el plano osculador, pues no tiene componente según la binormal a la curva. Presenta, sólo, una componente
tangencial γt = s̈ = v̇ y una componente normal γn = ṡ2 k = v 2 k.
γ n = v 2 k n
F IGURA 2.5: Componentes intrínsecas de γ
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 8/13
September 2, 2011
Kinematics of the Particle
M OVIMIENTOS PLANOS EN COORDENADAS POLARES
Algunos movimientos planos se describen mejor por medio de coordenadas polares en
el plano del movimiento. Por ejemplo, cuando existe simetría de revolución alrededor
de un eje.
−−→
Sea r = OM el vector posición de la partícula M que se mueve en el plano Oxy de
una referencia Oxyz. Se tomarán coordenadas polares (r, θ) dentro de dicho plano: el
polo coincide con O, la distancia polar r es r = |r| y el ángulo polar θ se mide desde
el semieje positivo de Ox.
Se introducirá una referencia móvil Ox1 y1 z1 , que acompaña a M durante su
movimiento, y cuyo plano Ox1 y1 coincide con Oxy. Los ejes Oz y Oz1 coinciden;
−−→
el eje Ox1 coincide en dirección y sentido con el radio vector r = OM, y el eje Oy1 se
elige de forma que Ox1 y1 z1 tenga la misma orientación que Oxyz.
El movimiento de interés es el de M respecto de Oxyz, y no el movimiento relativo a la
referencia auxiliar Ox1 y1 z1 . Este último es un sencillo movimiento unidimensional en
el que M describe el eje Ox1 ; recibe el nombre de movimiento radial, o movimiento
relativo al radiovector.
Los versores en las direcciones Ox1 y Oy1 se denominan, usualmente ur y uθ y están
ligados con los versores del triedro fijo por las relaciones
ur = + cos θi + sin θ j,
uθ = − sin θi + cos θ j,
i = cos θ ur − sin θ uθ
j = sin θ ur + cos θ uθ
(2.10)
(2.11)
de las que se obtienen, trivialmente, las relaciones
dur
= uθ ,
dθ
duθ
= −ur
dθ
(2.12)
y1
y
x1
M
r
uθ
ur
O
θ
x
z ≡ z1
F IGURA 2.6: Coordenadas polares en el plano Oxy
La clave del análisis consiste en: 1) usar las coordenadas (r, θ)
para definir la posición de M y, 2) expresar las magnitudes
vectoriales que intervienen en el movimiento del punto M, en
la base { ur , uθ } de la referencia móvil.
En coordenadas polares (r, θ), las ecuaciones horarias del
movimiento de la partícula, a partir de las cuales pueden obtenerse todas las características del movimiento, son
r = r(t),
que facilitan la derivación de los versores ur y uθ .
θ = θ(t)
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 9/13
September 2, 2011
Kinematics of the Particle
V ELOCIDAD Y ACELERACIÓN
Derivando el vector posición r = r(t)ur se obtiene el vector velocidad:
v =
y1
y
d
dur
dur
dr
= (r ur ) = ṙ ur + r
= ṙ ur + r θ̇
= ṙ ur + r θ̇ uθ
dt
dt
dt
dθ
mediante sus coordenadas en la base móvil {ur , uθ }. La componente ṙ ur se
denomina velocidad radial, y la r θ̇ uθ velocidad transversal.
Si es V al ángulo que v forma con el radiovector r , se tendrá
ṙ =
dr
= v cos V,
dt
r θ̇ = r
dθ
= v sin V
dt
tan V =
ϕ = θ(t) + V (t)
y la curvatura de la trayectoria es
k=
dθ dV
dϕ
=
+
.
ds
ds
ds
v
r
uθ
ur
x1
θ
M
O
x
F IGURA 2.7: Componentes intrínsecas
La aceleración γ del móvil resulta ser
rdθ
dr
que proporcionan: i) la primera forma fundamental del plano en coordenadas
polares, y ii) la dirección de la tangente a la trayectoria de M .
La hodógrafa es una curva plana y sus coordenadas polares son: v , la distancia
polar, y ϕ el ángulo polar. El ángulo que v forma con el eje Ox es θ + V . En
coordenadas polares, las ecuaciones paramétricas de la hodógrafa son
v = v(t),
t
n
en donde v = ṡ representa el módulo de la velocidad. A partir de ellas se
obtienen las clásicas fórmulas de geometría
ds2 = dr 2 + r 2 dθ 2 ,
V
γ
γ =
1 d 2
dv
= (r̈ − r θ̇ 2 )ur +
(r θ̇) uθ
dt
r dt
Se denominan aceleración radial y aceleración transversal a las componentes de γ según ur y uθ , respectivamente. No confundirlas con las componentes intrínsecas (tangencial y normal) que se obtienen proyectando sobre
el triedro (t, n):
t = ṙ ur + r θ̇ uθ ,
v
v
γt = γ · t,
n = −
r θ̇
ṙ
ur + uθ
v
v
γn = γ · n
Aquí v es la velocidad de la partícula.
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 10/13
September 2, 2011
Kinematics of the Particle
V ELOCIDAD Y ACELERACIÓN AREOLAR
= 1 (r × dr)
dA
2
Sean O un punto fijo del espacio y C la curva descrita por un móvil M; el
area elemental encerrada por la curva C y dos radiovectores consecutivos de M
—con origen en O— es el módulo del vector
=
dA
1
1
r × (r + dr) = r × dr
2
2
r + dr
dr
O
es el
perpendicular al plano determinado por los radiovectores. Al area |d A|
−−→
area barrida por el radio vector r = OM en el desplazamiento elemental dr.
Se define la velocidad areolar de M respecto de O como
v ar =
M
v ar = 12 r × v
1
dr
1
dA
= r ×
= r × v
dt
2
dt
2
Es un vector perpendicular al plano definido por r y v, cuyo módulo mide el
area barrida por el radio vector r en la unidad de tiempo. La aceleración
areolar de M respecto de O, de significado obvio, se define como
γ ar =
1
dv ar
= r × γ
dt
2
Estos conceptos son útiles en el estudio de movimientos planos en coordenadas
polares; la velocidad areolar respecto del polo O es un vector perpendicular al
plano del movimiento
v ar =
r
1
1
1
r × {r ur + r θ̇ uθ } = r 2 θ̇( ur × uθ ) módulo var = r 2 θ̇
2
2
2
v
O
r
M
F IGURA 2.8: Velocidad areolar
La aceleración areolar del punto M respecto del polo O es
γ ar =
d 1 2
( r θ̇)( ur × uθ )
dt 2
Si se usan coordenadas cartesianas en Oxy
1
v ar = (xẏ − ẋy) k,
2
1
γ ar = (xÿ − ẍy) k
2
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 11/13
September 2, 2011
Kinematics of the Particle
M OVIMIENTOS C ENTRALES
L EY DE ÁREAS
El movimiento de M es central si la recta soporte de su aceleración
pasa, constantemente, por un punto fijo O (polo del movimiento): la
aceleración pasa por O. Se toma una referencia Oxyz con origen
en O. Para este tipo de movimientos la aceleración areolar es nula
y, como consecuencia, la velocidad areolar es constante
El que la velocidad areolar sea constante se expresa mediante la ecuación
γ ar =
1
r × γ = 0
2
⇒
var =
1
1
r × v = c
2
2
Si la constante c es nula, la trayectoria es una recta que pasa por O
(demuéstrese). Si c = 0, la trayectoria está contenida en un plano
que pasa por O, definido por la posición y velocidad iniciales. En
efecto, multiplicando escalarmente por r los dos miembros de la
ecuación r × v = c, se deduce
r · (r × v) = r · c
⇒
r2
dθ
= c = 2var
dt
(ley de áreas)
donde c se llama constante de las áreas y es el doble del módulo de la velocidad
−−→
areolar. El area barrida por el radiovector OM, en la unidad de tiempo, se mantiene
constante o, si se prefiere, el área barrida es proporcional al tiempo empleado en
barrerla.
Si c = 0, θ̇ = 0 y θ = θ0 : la trayectoria es una recta que pasa por O. Si no se anula,
entonces θ̇ mantiene su signo, y a lo largo del movimiento el giro de M es siempre
en el mismo sentido.
La constante de áreas c es el módulo del vector c = r × v, por tanto
c = rv sen V = vd
r · c = 0
ecuación de un plano que pasa por el origen O y es ortogonal al
vector c. Este último está determinado por las condiciones iniciales
c = r0 × v 0
siendo d = r sen V la distancia del polo O a la tangente: en un movimiento central
la velocidad v es inversamente proporcional a la distancia de la tangente al polo.
En un movimiento central la trayectoria es plana, el plano en el
que está contenida pasa por el polo O y está definido por las condiciones iniciales (r 0 , v 0 ). Por ello, el análisis se realiza dentro del
plano y se usan coordenadas polares con polo en O.
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 12/13
September 2, 2011
Kinematics of the Particle
La velocidad adopta la forma
F ÓRMULAS DE B INET
Si la trayectoria de M está dada, conocer su velocidad en un instante no implica, en modo alguno, conocer la ley horaria. Es obvio
que distintas leyes horarias pueden tener en común la velocidad en
un instante. Por ejemplo, la circunferencia de centro el origen y
radio a puede recorrerse con las dos leyes horarias
s1 = a ωt,
s2 = a (eωt − 1),
ṡ1 (0) = ṡ2 (0) = aω
que, siendo distintas, comparten la velocidad inicial (t = 0).
Sin embargo, si la trayectoria, excepción hecha de las rectas que
pasan por O, es recorrida con un movimiento central, y se conoce
la velocidad en un punto, entonces la ley horaria está determinada
y, con ella, la velocidad en los restantes puntos de la trayectoria.
En efecto, sea vA la velocidad conocida de M en el punto r A de
la trayectoria; de la ley de áreas se deduce
r × v = c
⇒
r 2 θ̇ = c
donde c = r A × v A es un vector constante y conocido, no nulo,
ortogonal al plano del movimiento.
Si la trayectoria r = r(θ) es conocida, c es conocida y de la ley de
áreas se deduce la ley horaria:
1 θ 2
r (θ) dθ.
t=
c θ0
v =
dr
1 dr
1
θ̇ ur + r θ̇ uθ = c{ 2 ur + uθ }
dθ
r dθ
r
⇒
v = c{−
d 1
1
( ) ur + uθ }
dθ r
r
Así, v depende de dos factores; el primero, c, es función, sólo, de las condiciones
iniciales, mientras que el segundo depende, sólo, de la trayectoria. Esta ecuación
recibe el nombre de primera fórmula de Binet y, frecuentemente, se expresa en
forma escalar
d 1 2
1 2
v 2 = c2 {( ( )) + ( ) }
dθ r
r
La aceleración también está determinada en todos los puntos de la trayectoria. Para
ver esto, si se deriva en la expresión de v se tiene
γ =
d2 ( 1r ) 1
dv
c
dv
= θ̇
= 2 · c{
− } ur
dt
dθ
r
dθ2
r
⇒
γ = −
c2 d2 ( 1r ) 1
{
+ } ur
r 2 dθ2
r
ecuación en la que c2 representa la dependencia de γ con las condiciones iniciales;
los restantes elementos dependen solamente de la trayectoria. Cuando se escribe en
la forma
1
c2 d2 1
γ = − 2( 2( ) + )
r dθ r
r
recibe el nombre de segunda fórmula de Binet.
Las dos fórmulas de Binet no son independientes. En efecto, están relacionadas por
la ecuación
d 1
γ = ( v2)
dr 2
que es válida salvo en trayectorias circulares de centro el origen, r = cte (demuéstrese).
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Kinematics of the Particle
E JERCICIOS
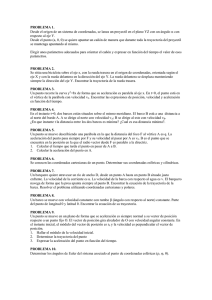
Ejercicio 1.- Un punto describe una trayectoria plana con una aceleración de módulo constante, aω 2 , y dirección variable que forma, con una dirección fija del
plano, el doble del ángulo que la velocidad forma con esa dirección. Hallar la
trayectoria y la ley horaria del movimiento del punto.
Ejercicio 2.- Una partícula material se mueve respecto de una referencia cartesiana rectangular Oxyz satisfaciendo las siguientes condiciones: i) su hodógrafa
es el paralelo intersección con el plano ż = (aΩ/2) de la esfera de
√ ecuación
ẋ2 + ẏ 2 + ż 2 = a2 Ω2 , ii) su aceleración normal es constante y de valor ( 3/2)aΩ2 ,
iii)√en el instante considerado como inicial el punto se encuentra en la posición
(a 3/2, 0, 0), con una velocidad ortogonal al radiovector. Determinar las ecuaciones horarias del movimiento de la partícula.
Ejercicio 3.- Una partícula se mueve con velocidad areolar constante respecto de
un punto, y las componentes normal y tangencial de su aceleración son en todo
instante iguales. Calcular su trayectoria, y ley horaria.
Ejercicio 4.- Cuatro moscas ocupan, en un instante determinado, los vértices de un
cuadrado de lado 2a. Si cada una de las moscas está persiguiendo a la siguiente y
todas tienen la misma velocidad, hallar las trayectorias que describen.
(E.T.S.I. de Caminos, 1966)
Ejercicio 5.- Determinar la trayectoria de un móvil sabiendo que es plana y que las
componentes, tangencial y normal de la aceleración son constantes.
Ejercicio 6.- Una partícula M describe un movimiento central respecto a un punto
O, de tal manera que su velocidad vale v = kr siendo r la distancia que lo separa
de O. Si inicialmente se encuentra a una distancia a de O con velocidad v0 normal
a OM , se pide: 1) Ecuaciones horarias del movimiento de M , 2) Trayectoria, 3)
Aceleración total, tangencial y normal, 4) Radio de curvatura de la trayectoria, 5)
Hodógrafa del movimiento.
Page: 13/13
September 2, 2011
Ejercicio 7.- Un barquero pretende cruzar de la orilla izquierda a la derecha de un
río, de anchura h y cuyas aguas discurren con una velocidad constante v . La barca
está dotada de un motor que le comunica una velocidad constante u respecto al agua
y dirigida según su eje longitudinal. Con objeto de alcanzar el punto O de la orilla
derecha el barquero orienta constantemente la barca hacia dicho punto, es decir,
maneja convenientemente el timón para que en todo momento la prolongación del
eje longitudinal de la barca pase por O.
Se supondrá para los apartados 1) a 4) que inicialmente la barca se encuentra en
el punto A situada en la perpendicular trazada por O a los márgenes del río. Se
pide: 1) Determinar la hodógrafa del movimiento de la barca respecto a tierra, 2)
Calcular la trayectoria de la barca respecto a tierra, 3) Determinar la condición que
deba cumplir u para que la barca llegue efectivamente a O, 4) Calcular el tiempo
que tarda el barquero en cruzar el río en el supuesto que se cumpla u = 2v , 5)
Determinar el punto B de la orilla izquierda del que debe partir el barquero con
objeto de que, cumpliendo las condiciones especificadas en el enunciado y en el
supuesto u = 2v , llegue a O en un tiempo mínimo.
(E.T.S.I. Aeronáuticos, Septiembre 1969)
Ejercicio 8.- Consideremos un plano horizontal y un sistema de referencia ortogonal Oxy en el mismo. Un hombre parte del punto O y recorre el eje Ox con una
velocidad constante v . Un perro parte del punto (0, a) con una velocidad constante
v/k y persigue al hombre de tal forma que en todo momento su vector velocidad va
dirigido hacia donde se encuentra éste.
Averiguar la trayectoria seguida por el perro y estudiar en qué casos llegará a alcanzar al hombre.
(E.T.S.I. de Caminos, 1962).
Ejercicio 9.- Un punto se mueve en el plano Oxy con velocidad de módulo constante (v0 ) y con aceleración normal igual a v0 2 /ε(s + s0 ), siendo s la longitud de
arco recorrida y ε y s0 dos constantes. En el instante inicial, s = 0 y la velocidad es según el eje Ox. Determinar la trayectoria del punto y la ley horaria del
movimiento.
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC