Mecanismo de 4 eslabones - Universidad Tecnológica de Pereira
Anuncio

CAPÍTULO 3. MECANISMO DE CUATRO ESLABONES
3.1 CONFIGURACIÓN DE UN MECANISMO DE CUATRO ESLABONES
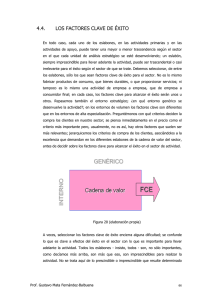
Un mecanismo de cuatro eslabones se conforma con cuatro eslabones y con cuatro pares giratorios, Fig 3.1.a,
o al reemplazar un par giratorio por pares prismáticos, constituyendo así la familia de mecanismos manivela
biela deslizador, Fig 3.1.b.
C
2
B
B
2
3
1
3
C
1
A
D
4
4
D
A
4
4
a) cuadrilatero articulado
b) mecanismo manivela biela deslizador
Figura 3.1 Mecanismo de cuatro eslabones
En el mecanismo con cuatro pares giratorios, los eslabones pueden oscilar o dar un giro completo
dependiendo de las dimensiones de los eslabones. La ley de Grashof afirma que para un mecanismo plano de
cuatro eslabones, la suma de las longitudes más corta y más larga no puede ser mayor que la suma de las
longitudes de los eslabones restantes, sí se desea que exista una rotación continúa de sus eslabones.
C
C2
C
2
3
2
B
3
C1
B
1
1
A
A
D
4
1
D
4
4
a) giratorio oscilante
b) giratorio giratorio
B4
B2
A2
A4
C
2
B
B
1
C
2
1
3
A
3
A
B1
4
A3
4
D
B3
A1
a) oscilante oscilante
b) oscilante oscilante
Figura 3.2 Configuraciones del cuadrilátero articulado
D
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
Dependiendo de la ubicación del eslabón más corto respecto al eslabón fijo se tendrán diferentes
configuraciones: sí el eslabón más corto –eslabón 1– es anexo al eslabón fijo, el mecanismo será rotatorio –
oscilante; sí el eslabón más corto es opuesto al eslabón fijo el mecanismo es oscilante – oscilante y por
último, sí el eslabón corto es el eslabón fijo, será un mecanismo rotatorio – rotatorio.
Convencionalmente se denomina como manivela aquel eslabón que puede realizar un giro completo, al
eslabón que tiene movimiento de giro alternativo se le denomina balancín o manivela oscilante. El eslabón
que sirve de conexión se le denomina acoplador.
3.2 POSICIÓN LÍMITE DEL MECANISMO MANIVELA BALANCÍN
En un mecanismo manivela balancín se obtiene una rotación completa de la manivela y una oscilación del
balancín. En el análisis de este mecanismo se pueden determinar varios parámetros, entre ellos: el ángulo de
oscilación del balancín, las posiciones de la manivela en las que el balancín alcanza sus posiciones límites y la
razón de tiempos, entendido como la relación entre el tiempo de avance y el tiempo de retorno del balancín.
C
C1
2
B
L2-L1
1
L1+L2
3
C2
B1
α
θ2
Δφ
φ2
φ1
θ1
A
4
4
B2
Figura 3.3 Posiciones límites del mecanismo manivela balancín
En la figura 3.3 se tiene un mecanismo de cuatro eslabones con dimensiones L1, L2, L3, L4, el subíndice indica
el eslabón correspondiente. Las dos posiciones límites del balancín se presentan cuando la manivela y el
acoplador forman un ángulo de 0º ó de 180º.
Para encontrar la coordenada angular de la manivela, θ1, y del balancín, φ1, en las que ocurren las posiciones
límites del balancín, C1, se encuentra el corte entre el arco con radio L2-L1 y centro en el apoyo fijo de la
manivela, y el arco con centro en el apoyo fijo del balancín y radio igual a la longitud del balancín. Del
análisis del triángulo AC1D, utilizando la ley del coseno en este triángulo se obtiene las siguientes ecuaciones:
( L1 + L2 )2 + L24 − L23
cos θ1 =
2 ( L1 + L2 ) ⋅ L4
cos φ1 =
,
3.2
( L1 + L2 )2 − L24 − L23
2 L3 ⋅ L4
Ec 3.1
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
De manera similar se obtienen las coordenadas en las que se presenta la segunda posición límite del balancín;
para este caso, se encuentra el punto C2 después de trazar el arco con centro en el apoyo fijo de la manivela y
radio L1+L2. Analizando el triángulo AC2D se determina el ángulo de la manivela, θ2, y del balancín, φ2:
cos ( θ2 − 180 ) =
( L2 − L1 )2 + L24 − L23
,
2 ( L2 − L1 ) ⋅ L4
cos φ2 =
( L2 − L1 )2 − L24 − L23
Ec 3.2
2 L3 ⋅ L4
El ángulo de oscilación del balancín se obtiene mediante la siguiente expresión:
φ = φ2 − φ1
Ec 3.3
La razón de tiempos se establece como la relación entre el tiempo en que el balancín pasa de la posición C1C2
y el tiempo en que retorna. Esta relación se puede obtener fácilmente encontrando el tiempo en que la
manivela pasa de la posición B1B2 y el tiempo requerido para pasar de la posición B2B1. Sí la manivela gira a
velocidad angular constante, se obtiene la siguiente expresión:
RT =
ángulo B1 AB2
180 + α
=
ángulo B2 AB1 180 − α
Ec 3.4
3.3 POSICIÓN LÍMITE DEL MECANISMO BIELA MANIVELA
Este mecanismo se obtiene al reemplazar un par giratorio por un par prismático. En este mecanismo, la
manivela da una revolución mientras que el deslizador genera un movimiento alternativo de traslación. Las
posiciones de la manivela en la que se presentan las posiciones extremas del deslizador pueden ser deducidas
de la figura 3.4.
B
L1+L2
2
1
L2-L1
L1
θ2
L2
α
A
e
B1
4
3
C D
C2
B2
C1
4
θ1
s2
Δs
s1
Figura 3.4 Posiciones límites de un mecanismo biela manivela
Para la primera posición límite, configuración en la que se obtiene la posición extrema derecha del deslizador,
mostrada en la figura 3.4 por el punto C1, se pueden establecer las siguientes ecuaciones:
sin θ1 =
e
;
L1 + L2
s1 = ( L1 + L2 ) ⋅ cos θ1
Ec 3.5
Para la segunda posición límite, posición extrema izquierda del deslizador, mostrada en la figura por el punto
C2, se pueden establecer las siguientes ecuaciones:
3.3
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
sin θ2 =
e
;
L2 − L1
s2 = ( L2 − L2 ) ⋅ cos ( θ2 − 180 ) ;
θ2 − 180 = θ1 + α
Ec 3.6
El desplazamiento del deslizador se obtiene de las ecuaciones 3.5 y 3.6:
Δs = s1 − s2
Ec 3.7
La razón de tiempos se obtiene mediante la siguiente expresión:
RT =
ángulo B1 AB2
180 + α
=
ángulo B2 AB1 180 − α
Ec 3.8
3.4 ÁNGULO DE TRANSMISIÓN, DESVIACIÓN Y PRESIÓN
Es aconsejable tener algún criterio que determine la efectividad con que el movimiento es entregado al
eslabón de salida, durante el funcionamiento del mecanismo. Un criterio establecido es el ángulo de
transmisión: el ángulo de transmisión γ es el menor ángulo entre la dirección del vector velocidad relativa,
vCB, del eslabón conductor y la dirección del vector velocidad absoluta, vC, del eslabón de salida, ambos
tomado en el par C, tal como se ilustra en la figura 3-5. El valor óptimo de este ángulo es 90º, la tolerancia
recomendada es ± 50º.
C
δ
δ
F23 C
2
γ
B
γ
γ
vCB
Fuerza
estática
vC
velocidad
absoluta
velocidad
relativa
3
1
A
4
4
D
Figura 3.5 Ángulo de transmisión y desviación
Otro criterio consiste en trabajar con la dirección de la fuerza estática y la velocidad del punto de conexión,
término conocido como el ángulo de desviación, δ. El valor óptimo de este ángulo es 0º. En un mecanismo de
cuatro barras los ángulos de transmisión y desviación son complementarios.
Cada mecanismo requiere del análisis del ángulo de transmisión. Este ángulo varía para cada posición del
mecanismo siendo por ello necesario la determinación del rango de valores de transmisión en el
funcionamiento del mecanismo, debido a que es un parámetro de diseño crítico. El valor mínimo permisible
del ángulo de transmisión depende de las fuerzas y la velocidad de la máquina. En los mecanismos con
eslabonamientos, se considera como aceptable un ángulo de transmisión mínimo mayor que 40º.
A continuación se realizará el análisis de diversos mecanismos.
3.4
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
MECANISMO MANIVELA BALANCÍN
Es posible encontrar una expresión para el ángulo de transmisión en función de la posición angular de la
manivela. El análisis a continuación es basado en la figura 3.6.
C
δ
L2
γ
B
γ
L3
d
L1
θ
A
4
L4
D
Figura 3.6 Ángulo de transmisión de un mecanismo biela manivela
Del Triángulo ABD se obtiene la siguiente expresión:
L12 + L24 + 2 L1 ⋅ L4 cos θ = d 2
Ec 3.9
Del Triángulo CBD se obtiene la siguiente expresión:
L22 + L23 + 2 L2 ⋅ L3 cos γ = d 2
Ec 3.10
Igualando las ecuaciones 3.9 y 3.10, se obtiene una expresión entre la posición angular de la manivela, θ, y el
ángulo de transmisión del mecanismo, γ .
L12 + L24 + 2 L1 ⋅ L4 cos θ = L22 + L23 + 2 L2 ⋅ L3 co s γ
Ec 3.11
Para establecer los valores máximo y mínimo del ángulo de transmisión, se obtiene la derivada con respecto a
θ de la última ecuación y se iguala a cero. Al realizar esta operación se obtiene:
d γ L1 L4 sin θ
=
=0
d θ L2 L3 sin γ
Ec 3.12
La ecuación 3.12 se cumple cuando:
sin θ = 0
Ec 3.13
Esta condición se obtiene cuando θ = 0º ó θ = 180º. En la figura 3.7 se presentan las dos posiciones en la que
se obtienen los valores del ángulo de transmisión máximo y mínimo.
Tomando como referencia la figura 3.7, se puede obtener unas expresiones para el ángulo de transmisión
máximo y mínimo. Analizando el mecanismo en la posición en que se presenta el máximo ángulo de
transmisión se obtiene:
3.5
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
⎛ L2 + L23 − ( L1 + L4 )2
γ máx = acos ⎜ 2
⎜
2 L2 L3
⎝
⎞
⎟
⎟
⎠
Ec 3.14
De manera similar, se obtiene una expresión para el ángulo de transmisión mínimo:
C
L2
γmín
L3
γmáx
A
B
L3
L2
C
B
A
D
D
L1
L1
L4
L4
Figura 3.7 Ángulo de transmisión máximo y mínimo
⎛ L2 + L23 − ( L4 − L1 )2
γ mín = acos ⎜ 2
⎜
2 L2 L3
⎝
⎞
⎟
⎟
⎠
Ec 3.15
MECANISMO DOBLE MANIVELA
En un mecanismo de doble manivela se obtienen las mismas condiciones que el mecanismo manivela
balancín. Las ecuaciones para los ángulos de transmisión máximo y mínimo de un mecanismo doble manivela
son:
⎛ L2 + L23 − ( L1 + L4 )2
γ máx = cos −1 ⎜ 2
⎜
2 L2 L3
⎝
⎛ L2 + L23 − ( L4 − L1 )2
γ mín = cos −1 ⎜ 2
⎜
2 L2 L3
⎝
⎞
⎟;
⎟
⎠
⎞
⎟
⎟
⎠
Ec 3.16
MECANISMO BIELA MANIVELA
El ángulo de transmisión de un mecanismo biela manivela se obtiene a partir de la figura 3.8.
γ
B
L2
δ
L1
θ
A
C
E
3
e
F
Figura 3.8 Ángulo de transmisión en un mecanismo biela manivela
3.6
D
4
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
Es posible obtener una expresión para el ángulo de transmisión en función de la posición angular de la
manivela. Del triángulo AFB se obtiene la siguiente expresión:
BE = BF − e = L1 sin θ − e
Ec 3.17
Del triángulo BED se obtiene la siguiente expresión:
BE = L2 sin δ = L2 cos γ
Ec 3.18
Igualando estas dos ecuaciones se obtiene la relación buscada:
BE = L1 sin θ − e = L2 cos γ
Ec 3.19
Los valores máximo y mínimo del ángulo de transmisión se obtienen derivando con respecto al ángulo θ, la
ecuación 3.19. Después de agrupar términos se obtiene la expresión Ec. 3.20:
L cos θ
dγ
=− 1
=0
dθ
L2 sin γ
Ec 3.20
La anterior se cumple para θ = 90 º y para θ = 270 º. En la figura 3.9 se determinan el ángulo de transmisión
y máximo del mecanismo biela manivela.
γmín
B
γmáx
L2
C
L1
D
D
C
4
e
3
e
A
A
L2
L1
B
Figura 3.9 Ángulo de transmisión mínimo y máximo de un mecanismo biela manivela
De la figura 3.9 se pueden obtener la ecuación para el ángulo de transmisión máximo y del ángulo de
transmisión mínimo:
⎛ L −e⎞
γ mín = acos ⎜ 1
⎟;
⎝ L2 ⎠
⎛ L +e⎞
γ máx = acos ⎜ 1
⎟
⎝ L2 ⎠
Ec 3.21
El concepto del ángulo de transmisión puede ser extendido a otro tipo de mecanismos. La definición del
ángulo de transmisión en un mecanismo depende del eslabón conducido del mecanismo. Por lo tanto, para
determinar el ángulo de transmisión, se debe conocer cual eslabón del mecanismo, es el eslabón conductor.
3.7
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
Por ejemplo, considere el mecanismo de seis eslabones de la figura 3.10. Se define como el eslabón motor al
eslabón 1 y al eslabón 5 como el eslabón de salida. En este mecanismo se requiere definir dos ángulos de
transmisión. En la primera definición se considera al eslabón 1 como eslabón conductor, al eslabor 2 como
acoplador y al eslabón 3 como eslabón de salida. En la figura 3.10 se presentan las fuerzas estáticas sobre el
eslabón 3 y la velocidad del punto B del eslabón 3; el ángulo de desviación se define como el ángulo que
forma la dirección de la fuerza de reacción entre los eslabones 2 y 3, y la dirección de la fuerza del punto B3;
el ángulo de transmisión se define como el ángulo formado entre la velocidad absoluta del punto B3 y la
velocidad relativa entre los eslabones 2 y 3. En la segunda definición, se considera al eslabón 3 como
acoplador y al 5 como eslabón de salida.
Para la determinación de los segundos ángulos de transmisión y desviación se realiza un procedimiento
similar, para ello se considera la dirección de la fuerza de reacción en el par F, la velocidad absoluta del
eslabón 5 y la velocidad relativa entre los puntos D y F del eslabón 3, considerado como segundo eslabón.
Segundo eslabón
de salida
F
5
γF
vFD
Segundo
acoplador
αF
γB
C
Primer
acoplador
αB
B
A
vF
6
G
2
1
vB4
F53
F23
F43
3
Pimer eslabón
de salida
4
D
E
6
Figura 3.10 Ángulo de transmisión en el mecanismo de la limadora
En los mecansimo de levas se tiene un concepto similar al ángulo de desviación. En este tipo de mecanismo
se define el ángulo de presión como el ángulo formado entre la fuerza transmitida (normal a la superficie de la
leva) y la dirección de la velocidad del seguidor. En la figura 3.11 se presenta esta definición. El ángulo de
presión
Los mecanismos de leva – seguidor deben ser diseñados tal que los valores máximos del ángulo de presión
φmáx no sean superiores a cierta magnitud. En la práctica, para un mecanismo leva seguidor, con movimiento
rectilíneo del seguidor φmáx = 30º; para un mecanismo leva seguidor, con movimiento oscilante del seguidor
φmáx = 45º. Esta condición puede ser satisfecha, para la ley de movimiento del seguidor, mediante la adecuada
elección del radio de la circunferencia primaria.
3.8
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
4
C
3
n
2
B
D
n
α
γ
Dirección
de vB
A
1
4
Figura 3.11 Ángulo de presión en un mecanismo de leva y seguidor
3.5 DISEÑO DE UN MECANISMO MANIVELA BALANCÍN
Se pretende diseñar un mecanismo en el que el balancín oscile un ángulo φ. En este diseño se tendrán en
cuenta dos condiciones: la razón de tiempos y el ángulo de transmisión. Se iniciará el estudio para una razón
de tiempos igual a la unidad. El procedimiento inicial no tendrá en cuenta el ángulo de transmisión.
Este procedimiento está basado en la figura 3.12. En la figura 3.12.a se presenta el balancín en sus posiciones
extremas. La dimensión del balancín se elige de acuerdo con las restricciones de espacio. En este caso, la
dimensión se determina por la dimensión CD.
En este procedimiento gráfico se traza una línea por los puntos extremos C1 y C2. En un punto arbitrario de la
línea extendida se ubica el pivote fijo de la manivela, A. Como la razón de tiempos es la unidad, se deduce
que la distancia AC1 se corresponde con la posición del mecanismo cuando la manivela y el acoplador están
formando 0º y la distancia AC2 corresponde a la posición del mecanismo cuando la manivela y el acoplador
están formando 180º. Por lo tanto la dimensión de manivela corresponde a la distancia C1C2. La distancia
B1C1 es la dimensión del acoplador.
Ya que la ubicación del punto A es arbitraria existen infinitas soluciones. Cada solución tendrá un ángulo de
transmisión diferente. En esta solución se requiere comprobar el ángulo de transmisión mínimo y máximo ya
sea mediante las ecuaciones 3.14 y 3.15 ó gráficamente. En la figura 3.13 se presentan el procedimiento
gráfico para determinar los ángulos de transmisión mínimo y máximo.
3.9
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
L1+L2
C
L2-L1
A
B2
2L1
C2
B1
C1
φ
L3
D
Figura 3.12 Diseño de un mecanismo manivela balancín
B4
L2
L1
C4
C3
A
L2
B3
γmáx
L4
γmín
L3
L3
D
Figura 3.13 Ángulo de transmisión máximo y mínimo
Existe un procedimiento analítico para determinar el ángulo de transmisión óptimo, en esta definición se
requiere que γmáx = 180 - γmín. Cuando la razón de tiempos es la unidad, se obtienen el siguiente sistema de
ecuaciones, ver figura 3.3:
cos φ1 =
cos φ2 =
( L1 + L2 )2 − L24 − L23
2 L3 ⋅ L4
( L2 − L1 )2 − L24 − L23
2 L3 ⋅ L4
φ = φ2 − φ1
3.10
Ec 3.22
Ec 3.23
Ec 3.24
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
⎛ L2 + L23 − ( L1 + L4 )2 ⎞
⎟
γ máx = acos ⎜ 2
⎜
⎟
2 L2 L3
⎝
⎠
⎛ L22 + L23 − ( L4 − L1 )2 ⎞
⎟
γ mín = acos ⎜
⎜
⎟
2 L2 L3
⎝
⎠
Ec 3.25
Ec 3.26
Resolviendo simultáneamente este conjunto de ecuaciones, adicionando la condición de ángulo de
transmisión óptimo, se tendría las siguientes relaciones:
1/ 2
L2 ⎛ 1 − cos φ ⎞
=⎜
⎟
L4 ⎜⎝ 2 cos 2 γ mín ⎟⎠
Ec 3.27
1/ 2
2
⎤
1 − ( L2 L4 )
L3 ⎡
⎥
=⎢
2
L4 ⎢1 − ( L2 L4 ) ⋅ cos 2 γ mín ⎥
⎣
⎦
Ec 3.28
1/ 2
2
2
⎞
L1 ⎛ ⎛ L2 ⎞ ⎛ L3 ⎞
= ⎜ ⎜ ⎟ + ⎜ ⎟ − 1, 0 ⎟
⎟
L4 ⎜ ⎝ L4 ⎠ ⎝ L4 ⎠
⎝
⎠
Ec 3.29
En la figura 3.14 se presenta una carta de diseño para un mecanismo manivela balancín con razón de tiempos
igual a 1,0 utilizando la metodología de ángulo de transmisión óptimo.
Relación de longitudes
1
γ=30º
γ=40º
0,9
γ=50º
0,8
L1/L4
0,7
L2/L4
L3/L4
0,6
0,5
0,4
0,3
γ=50º
0,2
γ=40º
γ=30º
0,1
0
0
20
40
60
80
100
120
φº
Figura 3.14 Ángulo de transmisión óptimo de un mecanismo manivela balancín
3.11
140
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
Cuando en el diseño del mecanismo manivela balancín se específica la razón de tiempos, se modifica el
procedimiento de diseño. Utilizando la ecuación 3.4, se determina el ángulo α ilustrado en la figura 3.3. El
procedimiento a seguir se desarrolla en la figura 3.15. Inicialmente se elige la longitud de la manivela y las
dos posiciones límites del balancín, con ello se ubican las dos posiciones del punto C. Por el punto C1 se
dibuja una línea C1X con cualquier inclinación, después se dibuja una línea C2Y por el punto C2 que forme
un ángulo α con la primera línea. En la intersección de ambas líneas se ubica el punto A el cual es el pivote
fijo de la manivela del mecanismo. La distancia AC1 es la suma de las longitudes de la manivela y el
acoplador; La distancia AC2 es la resta de las longitudes del acoplador y de la manivela.
C2
2L1
C1
L2-L1
α
φ
L3
L3
B1
A
D
L1+L2
L1
X
B2
Y
Figura 3.15 Diseño del mecanismo manivela balancín para RT > 1,0
La diferencia de ambas longitudes es el doble de la dimensión de la manivela. Como el diseño del mecanismo
queda determinado por la orientación dada a la línea C1X, existen infinitas soluciones. Se hace necesario
comprobar el ángulo de transmisión mínimo y máximo, para evaluar la solución obtenida. En la figura 3.16.
se comprueban estos ángulos.
Existe un procedimiento gráfico para el diseño de un mecanismo manivela balancín con una razón de tiempos
especificados y con un ángulo de oscilación del balancín dado. En este procedimiento se pretende obtener un
diseño con un ángulo de transmisión óptimo (γmáx = 180 - γmín.). En la figuras 3.15 y 3.16 se diseñan con los
siguientes valores: RT = 1,4 (α = 30º) y φ = 78º; el rango del ángulo de transmisión del mecanismo es
γmín = 21º; γmáx = 101º.
3.12
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
C3
C4
L3
L3
L2
γmáx
γmín
L2
D
A
B4
B3
L1
Figura 3.16 Ángulos de transmisión mínimo y máximo para RT>1,0
En la figura 3.17 se presenta el procedimiento de diseño. En este diseño se elige el eslabón fijo de igual
magnitud de la primera solución, con este paso se obtienen la posición de los puntos A y D. En el punto A se
traza una línea formando un ángulo (φ/2 - α) con la línea AD y en el punto D se traza un línea formando un
ángulo (φ/2) de esta manera se encuentra los puntos E y F. Con centro en estos dos puntos se trazan dos
circunferencias con radio r = LEA.
β3
Lugar geométrico
de C1
β2
F
β1
D
A
φ/2
φ/2−α
Lugar geométrico
de C2
E
Figura 3.17 Diseño gráfico del ángulo de transmisión óptimo
3.13
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
La circunferencia con centro F es el lugar geométrico de los puntos C1 y la circunferencia con centro E es el
lugar geométrico de los puntos C2. Se trazan línea con diferentes valores de β hasta cortar la línea del lugar
geométrico de C1 (esta operación equivale a elegir la primera posición limite del balancín). Al encontrar un
punto C1 se encuentra el punto C2 con un arco con centro en D y radio DC1 que corta el lugar geométrico de
C2, tal como se presenta en la figura 3.17.
Al encontrar los puntos C1 y C2 se puede dimensionar el mecanismo y encontrar el ángulo de transmisión
mínimo. Tal procedimiento se presenta en la figura 3.18.
C1
C
γmín
C2
φ
α
β
D
A
Figura 3.18 Procedimiento de cálculo del ángulo de transmisión
Para cada ángulo β se encuentra el ángulo de transmisión mínimo y se gráfica como en la figura 3.19. El
ángulo de transmisión óptimo es aquel en que se tiene mayor ángulo de transmisión mínimo.
Existe un procedimiento analítico para determinar el ángulo de transmisión óptimo. De la figura 3.3 se
obtienen las siguientes ecuaciones:
L23 = ( L1 + L2 ) + L24 − 2 ( L1 + L2 ) ⋅ L4 cos θ1
Ec 3.30
L23 = ( L2 − L1 ) + L24 − 2 ( L2 − L1 ) ⋅ L4 cos ( α + θ1 )
Ec 3.31
L23 ⋅ (1 − cos φ ) = L22 ⋅ (1 − cos α ) + L12 ⋅ (1 + cosα )
Ec 3.32
2
2
Resolviendo el anterior sistema de ecuaciones se obtiene un proceso iterativo para encontrar el ángulo de
transmisión óptimo. Primero se debe resolver el siguiente polinomio para L2:
A1 ⋅ L42 + A2 ⋅ L32 + A3 ⋅ L22 + A4 ⋅ L2 + A1 = 0
3.14
Ec 3.33
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
γmín º
30
25
20
15
10
5
0
0
10
20
30
40
50
60 β º
Figura 3.19 Ángulo de transmisión mínimo en función de β
donde
A1 = ( cos φ − cos α ) ⋅ ⎡⎣cos θ1 − cos ( α + θ1 ) ⎤⎦
2
Ec 3.34
A2 = 2 L1 ⋅ (1 − cos α ) ⋅ ⎡⎣cos 2 θ1 − cos 2 ( α + θ1 ) ⎤⎦
Ec 3.35
{
}
A3 = 2 L12 ⋅ ( 2 − cos φ ) ⋅ ⎡⎣ cos 2 θ1 + cos 2 ( α + θ1 ) ⎤⎦ − 2 cos α cos θ1 cos ( α + θ1 ) − 2 (1 − cos φ )
A4 = 2 L13 ⋅ (1 + cos α ) ⋅ ⎡⎣cos 2 θ1 − cos 2 ( α + θ1 ) ⎤⎦
A5 = L14 ⋅ ( cos φ + cos α ) ⋅ ⎡⎣cos θ1 + cos ( α + θ1 ) ⎤⎦
Ec 3.36
Ec 3.37
2
Ec 3.38
Para cada solución de L2 se encuentra la longitud de los demás eslabones.
L4 =
2 L1 ⋅ L2
L2 ⋅ ⎡⎣cos θ1 − cos ( α + θ1 ) ⎤⎦ + L1 ⋅ ⎡⎣cos θ1 + cos ( α + θ1 ) ⎤⎦
Ec 3.39
1/ 2
2
L3 = ⎡( L1 + L2 ) + L24 − 2 ( L1 + L2 ) ⋅ L4 cos θ1 ⎤
⎣
⎦
Ec 3.40
Al tener la solución de la dimensión de los eslabones se comprueba el ángulo de transmisión mínimo:
⎡ L2 + L23 − ( L4 + L1 )2 ⎤
⎥
γ mín = cos −1 ⎢ 2
2 L2 ⋅ L3
⎢⎣
⎥⎦
3.15
Ec 3.41
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
El procedimiento consiste en asumir un ángulo θ1 = 0º y encontrar las dimensiones de los eslabones con las
ecuaciones 3.33 a la 3.40, encontrar el ángulo de transmisión mínimo para solución. Incrementar el ángulo θ1
hasta 90º y resolver cada una de las ecuaciones anteriores. La solución es aquella que obtenga el mayor γmín.
En la figura 3.20 se presenta una carta para el diseño de un mecanismo manivela balancín para una razón de
tiempos RT = 1,118 (α = 10 º) obtenida mediante el método analítico.
9
90
8
80
180 − γmáx
7
70
6
60
5
50
γmáx
L4 / L1
L2 / L1
γmín
θ1
L4 / L1
γmín
40
4
L2 / L1
L3 / L1
3
θ1
30
L3 / L1
2
20
1
10
10
20
30
40
50
60
70
80
90
φ (º)
Figura 3.20 Diseño de un mecanismo manivela balancín
3.6 DISEÑO DE UN MECANISMO DOBLE MANIVELA
Un mecanismo doble manivela es diseñado para transformar un movimiento uniforme en un movimiento de
rotación irregular. Este mecanismo es diseñado en serie con otro mecanismo para tener un movimiento
característico de velocidad, aceleración, etc. El diseño consiste en tener un buen ángulo de transmisión.
En la figura 3.21 se presenta un mecanismo doble manivela en las posiciones donde el ángulo de transmisión
es mínimo ó máximo. En el diseño del ángulo de transmisión óptimo se pretende que:
γ máx = 180 − γ mín
3.16
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
C4
γmín
3
2
β1
C3
B4
4
1
D
β2
A
ψu
γmín
B3
Figura 3.21 Mecanismo de doble manivela
En la figura 3.22 se presenta el método gráfico para el diseño de un mecanismo de doble manivela con ángulo
de transmisión óptimo. En este procedimiento se elige la longitud del eslabón fijo, fijando los apoyos A y D.
Se elige arbitrariamente la longitud de la contramanivela y las dos posiciones en las que se dan el ángulo de
transmisión mínima y máximo, separados un ángulo ψu, puntos B3 y B4. El ángulo de transmisión máximo se
elige tal que cumpla γmáx = 180 - γmín.
B4
C4,1 2
C4
C4,2
γmín
C3,3
3
A
4
C3
D
1
ψu
C4,3
γmín
C3,2
2
C3,1
3
B3
Figura 3.22 Diseño gráfico del ángulo de transmisión óptimo
3.17
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
Desde el punto B3 se traza la línea en la que se ubicará el punto C3 formando el ángulo γmín entre las líneas
DB3 y B3C3k; se utiliza un procedimiento similar para obtener la línea en la que se ubicará el punto C4
formando el ángulo γmáx = 180 - γmín, entre las líneas AB4 y B4C4k. Eligiendo un radio arbitrario rk se traza un
arco desde B4 y B3 cortando las líneas para hallar los puntos C4k y C3k respectivamente. Se unen los dos
puntos encontrados. El procedimiento se repite hasta que la línea que une a los puntos C4k y C3k pasa por el
punto D, hallando así a los puntos C3 y C4. La distancia entre estos dos puntos es igual al doble de la longitud
de la manivela, y el apoyo A se encuentra en el punto medio de estos dos puntos; recuerde que los puntos C3 y
C4 representan la ubicación del par de unión entre la manivela y el acoplador en posiciones diametralmente
opuesta.
El procedimiento analítico es basado en la figura 3.21. De la aplicación de la ley de coseno a los triángulos
DB4C4 y DB3C3 se obtienen las siguientes expresiones:
L22 + L23 + 2 L2 ⋅ L3 cos γ mín = ( L1 + L4 )
L22 + L23 − 2 L2 ⋅ L3 cos γ mín = ( L1 − L4 )
2
2
Ec 3.42
Ec 3.43
L23 + ( L1 − L4 ) − 2 L3 ⋅ ( L1 − L4 ) cos β2 = L22
Ec 3.44
L23 + ( L1 + L4 ) − 2 L3 ⋅ ( L1 + L4 ) cos β1 = L22
Ec 3.45
2
2
Utilizando la ley de senos, se obtienen las siguientes ecuaciones:
L1 + L4
L
= 2
sin γ mín sin β1
Ec 3.46
L1 − L4
L2
=
sin γ mín sin β2
Ec 3.47
ψ u + β2 = 180 + β1
Ec 3.48
L22 + L23 = L12 + L24
Ec 3.49
Por comparación de ángulos se cumple:
Sumando la ecuación 3.42 y 3.43 se obtiene:
Restando la ecuación 3.43 de la ecuación 3.42, se obtiene:
cos γ mín =
L1 ⋅ L4
L2 ⋅ L3
Ec 3.50
Organizando los términos de la ecuación 3.48 y aplicando la función coseno a ambos lados de la igualdad, se
obtiene:
cos ψ u = sin β1 ⋅ sinβ2 − cos β1 ⋅ cos β2
Ec 3.51
Reemplazando los términos cos β1, cos β2, sin β1, sin β2, de las ecuaciones 3.44 a 3.47 en la ecuación 3.51 y
simplificando términos, se obtiene la siguiente solución:
3.18
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
1/ 2
L1 ⎡ B C B 2 ⎤
= ⎢−
+ +
⎥
L4 ⎣ 2 A A 4 A2 ⎦
Ec 3.52
1/ 2
2
L2 ⎡ ( L1 L4 ) (1 + cos ψ u ) + (1 − cos ψ u ) ⎤
⎥
=⎢
L4 ⎢
2 cos 2 γ mín
⎥⎦
⎣
Ec 3.53
L3
L1 L4
=
L4 ( L2 L4 ) ⋅ cos γ mín
Ec 3.54
donde:
⎛ 1 + cos ψ u
A = (1 + cos ψ u ) ⋅ ⎜⎜1 −
2
⎝ 2 cos γ mín
⎞
⎟⎟
⎠
Ec 3.55
⎛ 1 + cos ψ u ⎞
B = ( cos ψ u − 1) ⋅ ⎜⎜1 +
⎟
cos 2 γ mín ⎟⎠
⎝
Ec 3.56
⎛
cos ψ u − 1 ⎞
C = ( cos ψ u − 1) ⋅ ⎜⎜1 −
⎟⎟
2
⎝ 2 cos γ mín ⎠
Ec 3. 57
3.7 DISEÑO DE UN MECANISMO BIELA MANIVELA
El diseño del mecanismo manivela deslizador consiste en obtener una carrera del deslizador con una relación
de tiempos establecida. La excentricidad puede ser asumida o ser un dato de la información. En la figura 3.23
se presenta el procedimiento para el diseño del mecanismo manivela deslizador.
B
ΔS
2
3
C2
X2
C
L2-L1
1
A
Y2
α
4
D
e
B1
X1
C1
2L1
Y1
4
L1+L2
B2
Figura 3.23 Construcción del mecanismo
Inicialmente se trazan dos líneas paralelas X1Y1 y X2Y2 separadas por la distancia e, la cual es la
excentricidad del mecanismo. En un punto sobre la línea x1y1 se ubica el pivote fijo del mecanismo A. Con la
relación de tiempos exigida se determina el ángulo α de acuerdo con la ecuación 3.8. Se trazan dos líneas que
pasen por el punto A y que formen entre sí el ángulo α. Se mide la distancia entre los puntos C1’ y C2’, los
cuales son las intersecciones de estas líneas con X2Y2. Se gira las dos líneas alrededor de A hasta obtener la
3.19
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
distancia S1-2 entre los puntos C1 y C2. La distancia AC1 representa la suma de las longitudes de los eslabones
1 – 2 y la distancia AC2 representa la diferencia de las longitudes de los eslabones 1 – 2.
En la figura 3.24 se determina los ángulos de transmisión mínimo y máximo del diseño obtenido. Si estos
ángulos no son convenientes se determina otro valor de excentricidad y se repite el proceso.
L2
B3
2
γmín
γmáx
X2
3
3
A
C3
1
C4
4
C1
D
X1
4
2
L2
1
B4
Figura 3.24 Comprobación del mecanismo
En el método analítico, se requiere inicialmente determinar las expresiones que se servirán para obtener las
dimensiones de los eslabones del mecanismo manivela deslizador. Estas variables estarán en función de las
condiciones de diseño establecidas (razón de tiempos, carrera del deslizador, ángulos de transmisión mínimo
o máximo).
En el primer análisis, no se incluirá los ángulos de transmisión mínimo o máximo en las expresiones. Basado
en la figura 3.23 y 3.4 se pueden establecer las siguientes relaciones obtenidas de la posiciones límite del
deslizador:
( L1 + L2 ) sin θ1 = ( L2 − L1 ) sin ( θ1 + α ) = e
Ec 3.59
( L1 + L 2 ) cos θ1 − ( L2 − L 1 ) cos ( θ1 + α ) = Δs
Ec 3.60
Del manejo algebraico de las ecuaciones 3.59 y 3.60, se obtienen las siguientes expresiones:
L1 =
( sin ( θ1 + α ) − sin θ1 ) ⋅ Δs
( sin ( θ1 + α ) + sin θ1 ) ⋅ ( cos θ1 − cos ( θ1 + α ) ) − ( sin θ1 − sin ( θ1 + α ) ) ⋅ ( cos θ1 + cos ( θ1 + α ) )
Ec 3.61
L2 =
( sin ( θ1 + α ) + sin θ1 ) ⋅ Δs
( sin ( θ1 + α ) + sin θ1 ) ⋅ ( cos θ1 − cos ( θ1 + α ) ) − ( sin θ1 − sin ( θ1 + α ) ) ⋅ ( cos θ1 + cos ( θ1 + α ) )
Ec 3.62
⎛ L −e⎞
γ mín = cos −1 ⎜ 1
⎟;
⎝ L2 ⎠
⎛ L +e⎞
γ máx = cos −1 ⎜ 1
⎟
⎝ L2 ⎠
3.20
Ec 3.63
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
Utilizando las expresiones 3.61 y 3.62, se obtiene las dimensiones de la manivela y del acoplador, en función
del ángulo θ1, configuración en la que se presenta una de las posiciones límites del deslizador. Con estos
valores, se obtienen la excentricidad, e, y los ángulos de transmisión mínimo y máximo del mecanismo. En la
Figura 3.25, se obtiene la solución de estas variables al variar θ1 y para el caso α = 10º y Δs = 15 cm.
γmín, 180 − γmáx [º]
L1, L2, L3
40
120
35
100
30
γmín
25
20
L2
80
180 − γmáx
60
θopt
15
40
e
10
L1
20
5
0
0
2
4
6
8
10
12
14
16
18
0
20 θ1 [º]
Figura 3.25 Solución para α = 10º y Δs = 15 unidades
Existe un valor óptimo, θ1, resaltado en la figura 3.25; este valor es el correspondiente con el que se obtiene el
ángulo de transmisión máximo más alejado de 180º. Un procedimiento basado en las expresiones anteriores,
consiste en utilizar las expresiones anteriores e identificar la solución con la que se tiene este valor óptimo. El
ángulo de transmisión mínimo es ascendente, contrario al del ángulo de transmisión máximo, el cual tiene un
punto de variación.
Es posible hallar las expresiones cuando se especifican uno de los dos ángulos de transmisión como criterio
de diseño. La primera solución consistiría en obtener la solución de la figura 3.25. Sin embargo, si se quiere
encontrar un método más preciso, se requiere adicionar una expresión para el ángulo de transmisión máximo,
o del mínimo.
De la expresión 3.63 se obtiene:
e = L2 cos ( π − γ máx ) − L1
Ec 3.64
Basado en la geometría de la figura 3.4, se obtiene la siguiente expresión:
2 L12 (1 + cos α ) + 2 L22 (1 − cos α ) = Δs 2
Ec 3.65
Del manejo algebraico de las expresiones 3.59 y 3.60, se obtiene
( ⎡⎣( L − L ) sin α⎤⎦
2
1
2
)
+ ⎡⎣ L1 + L2 − ( L2 − L1 ) cos α ⎤⎦ sin θ1 = Δs ⋅ ( L2 − L1 ) sin α
2
3.21
Ec 3.66
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
Del manejo de las expresiones 3.59 y 3.64, se obtiene:
sin θ1 =
L2 cos ( π − γ máx )
Ec. 3.67
L1 + L2
Reemplazando la expresión 3.67 en la 3.66, y despejando L1 de la 3.65 y reemplazando en la 3.66 se obtiene
una expresión para L2:
A4 L42 + A3 L32 + A2 L22 + A1 L2 + A0 = 0
Ec 3.68
siendo
A4 = sin 2 α + 2sin 2 α (1 − cos α ) / (1 + cos α ) + sin α (1 − cos α ) / (1 + cos α )
2
A3 = −Δs ⋅
2
4 cos ( π − γ máx ) sin α
(1 + cos α )
⎡
sin 2 α (1 − cos α ) (1 − cos α ) ⎤
sin 2 α
⎥
A2 = Δs 2 ⋅ ⎢cos ( π − γ máx ) −
−
+
(1 + cos α )
(1 + cos α ) ⎥⎦
⎢⎣
(1 + cos α )2
A1 = Δs 3 ⋅
cos ( π − γ máx ) sin α
(1 + cos α )
⎡ sin 2 α
⎤
1
⎥
A0 = Δs 4 ⋅ ⎢
−
2
2 (1 + cos α ) ⎥
⎢⎣ 4 (1 + cos α )
⎦
De la solución del polinomio para L2, dado por la ecuación 3.68, se obtienen cuatro soluciones. En algunos
casos se obtienen soluciones imaginarias o negativas, las cuales no se tienen en cuenta. Las soluciones reales
y positivas, son las dimensiones del acoplador de una configuración que satisface las condiciones de diseño
establecidas (relación de tiempos, ángulo de transmisión máximo y carrera del deslizador). La longitud de la
manivela se obtiene de la ecuación 3.65:
L1 =
Δs 2 − 2 L22 (1 − cos α )
2 (1 + cos α )
Ec 3.69
3.8 MECANISMOS AFINES (COGNADOS)
Suponga que se tiene el diseño de un mecanismo de cuatro eslabones cuyo punto del acoplador genera una
trayectoria deseada, pero la ubicación de los pivotes fijos es un inconveniente. Es posible obtener un
mecanismo con geometría diferente con un punto del acoplador que genere la misma trayectoria. En la figura
3.26 se tiene un mecanismo a partir del cual se pretende diseñar el mecanismo afín.
El procedimiento de diseño del mecanismo afín se presenta en la figura 3.27. Observe que el eslabón 4 es
paralelo al lado DP del eslabón 2 y el lado HP es paralelo al eslabón 1. El eslabón 5 es semejante al acoplador
2, el ángulo formado en el vértice H es igual al ángulo del vértice D. El eslabón 7 es paralelo al lado EP del
acoplador y el lado FP es paralelo al eslabón 3, de nuevo se obtiene el eslabón 8 semejante al acoplador y el
ángulo del vértice P es igual al ángulo del vértice D. El eslabón 9 es paralelo al lado IP del eslabón 5 y el
eslabón 6 es paralelo al lado PG del eslabón 8. Los pivotes ABC forman un triángulo semejante al acoplador
del mecanismo original. Los tres mecanismos afines son: 1 – 2 – 3; 4 – 5 – 6; 7 – 8 – 9;
3.22
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
Trayectoría del
punto del acoplador
P
2
E
3
B
A
1
D
Figura 3.26 Mecanismo de cuatro eslabones para generar una trayectoria del acoplador
I
5
α
P
H
α
E
6
α
4
8
3
2
F
1
C
9
7
D
A
G
B
Figura 3.27 Determinación de los mecanismos afines
3.23
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
P
Trayectoría del
punto del acoplador
Trayectoría del
punto del acoplador
P
E
8
3
F
2
9
7
B
A
1
B
Mecanismo original
C
Mecanismo afín
D
Figura 3.28 Generación de trayectoria
Hartenberg and Denavit demuestran que para una posición angular se cumplen las siguientes relaciones de la
velocidad angular.
ω1 = ω5 = ω9;
ω4 = ω2 = ω7;
ω3 = ω8 = ω6;
En la figura 3.29 se presenta el procedimiento de diseño cuando el punto del acoplador está contenido en el
lado que une los pivotes.
F
P
Trayectoría del
punto del acoplador
5
E
G
2
4
8
D
3
I
9
1
B
C
A
7
H
Figura 3.29 Procedimiento de diseño
3.24
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
P
P
Trayectoría del
punto del acoplador
Trayectoría del
punto del acoplador
E
2
8
D
3
9
1
B
C
B
A
7
Mecanismo original
Mecanismo afín
H
Figura 3.30 Comprobación de los mecanismos afines
Los tres mecanismos afines son: 1 – 2 – 3; 4 – 5 – 6; 7 – 8 – 9. Los dos mecanismos afines que generan la
misma trayectoria, por tener la configuración manivela balancín, son 1 – 2 – 3; 7 – 8 – 9. En la figura 3.30 se
presenta la generación de la trayectoria de ambos mecanismos.
Chevyshev estableció que es posible generar un mecanismo de cinco eslabones con relación de engranajes
igual a 1,0 para generar la misma trayectoria de un mecanismo de cuatro eslabones. En la figura 3.33 se
presenta el procedimiento de diseño. El engranaje intermedio 6 garantiza una relación de transmisión unitaria
entre los engranajes 4 y 8 y en el mismo sentido.
Figura 3.31 Mecanismo afín de cinco eslabones
3.25
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
3.9 MECANISMOS DE MOVIMIENTO PARALELO
Este tipo de mecanismo es utilizado cuando se requiere producir movimiento sobre una pieza sin producir
rotación. Sus aplicaciones son para el transporte de piezas, garantizar la posición angular de algún eslabón,
entre otras. A partir de un mecanismo de cuatro eslabones, al cual se le conoce la curva del acoplador, se
diseña el mecanismo de movimiento de movimiento paralelo mediante el diseño del mecanismo afín.
En los mecanismos afines el punto del acoplador genera la misma trayectoria y su velocidad vectorial es la
misma si ambas manivelas tienen la misma velocidad angular y el ciclo se inicia en la posición angular en que
ambos puntos del acoplador coincidan. En la figura 3.32 se diseña el mecanismo de movimiento paralelo a
partir de los dos mecanismos afines seleccionados (1 – 2 – 3; 7 – 8 – 9). El segundo mecanismo se traslada
como un bloque desde el pivote fijo de su manivela, C, hasta la posición del pivote fijo de la manivela del
primer mecanismo, A.
P
P'
E
2
3
C
8
A
F
7
C'
1
D
G 9
B
Figura 3.32 Generación del mecanismo de movimiento paralelo
La trayectoria del punto P’ es idéntica a la del punto P. Si se crea un eslabón entre estos dos puntos realizará
un movimiento sin rotación cuando la velocidad de los eslabones 1 y 9 sean iguales. Para simplificar el
mecanismo, se elimina el eslabón 7 y se crea un solo eslabón para 1 y 9. En la figura 3.33 se presenta el
mecanismo simplificado y la trayectoria de varios puntos del eslabón 10.
3.26
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
P
P''
10
P'
Trayectoría de P
E
Trayectoría de P''
Trayectoría de P'
3
2
8
A
1
D
G
B
Figura 3.33 Comprobación del mecanismo
3.10 MECANISMOS CON DETENIMIENTO
En algunas aplicaciones se requiere diseñar un mecanismo que produzca un detenimiento en el eslabón de
salida cuando hay movimiento en el eslabón de entrada. Un buen procedimiento de diseño consiste en obtener
el diseño a partir de las curvas del acoplador. Se pretende encontrar una curva del acoplador en el que se
produzca un arco o una línea recta. En la figura 3.34 se presenta una configuración que describe un semi arco,
si un eslabón de longitud igual al radio de curvatura tiene su otro pivote en el centro de curvatura cuando el
punto del acoplador pase por el semiarco.
C
P
r
E
3
Centro de
curvatura
2
1
B
D
A
Figura 3.34 Diseño de un mecanismo con detenimiento simple
3.27
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
El punto E se utiliza para unir el eslabón de salida al mecanismo, garantizando así un detenimiento angular. El
tiempo de detenimiento depende del tiempo que requiere el mecanismo para barrer el semiarco de la
trayectoria. En la figura 3.35 se termina el proceso de diseño cuando se específica el ángulo de oscilación del
eslabón de salida.
F
P
E
Centro de
curvatura
E2
Bisectriz
Punto inferior
sobre la bisectriz
Figura 3.35 Diseño del eslabón de salida
El eslabón EF es el eslabón de unión entre el mecanismo y el eslabón de salida. Para garantizar un ángulo de
oscilación de salida, se procede a recorrer al punto P sobre la trayectoria generada a la vez que el punto E se
traslada sobre la bisectriz hasta encontrar el punto inferior, E’. Se ubica el punto F de tal manera que forme un
el ángulo de diseño para el eslabón de salida, el cual se va a utilizar como pivote fijo. Las distancias EP y EF
determinan las dimensiones de los otros dos eslabones. Al ensamblar el mecanismo es importante verificar la
posición del pivote fijo F.
En la figura 3.36 se presenta el mecanismo final y se comprueba el ángulo de rotación del eslabón de salida.
C
F
P
6
5
E
3
2
1
B
A
B
Figura 3.36
3.28
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
Si la trayectoria del punto del acoplador describe una semirecta, tal como en la figura 3.37, es posible obtener
un mecanismo de 6 eslabones con un eslabón de movimiento angular en el que el eslabón de salida tenga un
detenimiento.
C
P
2
3
Trayectoría de P
1
B
A
D
Semirecta
Figura 3.37 Mecanismo con detenimiento angular
En el proceso de diseño se genera un eslabón cuyo pivote fijo esté ubicado sobre la semirecta y se adiciona un
deslizador para la unión al mecanismo. Cuando el punto del acoplador se traslade sobre la semirecta, el
eslabón de salida se detiene presentando desplazamiento angular en el resto de la trayectoria. En la figura 3.38
se presenta el mecanismo resultante.
Con un mecanismo de cuatro eslabones, en la que un punto del acoplador genere un semiarco, es posible
obtener un mecanismo de seis eslabones, en el que el eslabón de salida tenga movimiento lineal con
detenimiento, tal como se ilustra en la figura 3.39.
En este mecanismo, ver figura 3.39, se obtiene la dirección del movimiento del deslizador 6, como la bisectriz
del semiarco de la trayectoria del acoplador. El eslabón de enlace tiene la dimensión del radio de curvatura del
semiarco. Cuando el punto del acoplador se traslade sobre el semiarco el deslizador permanece en el centro de
curvatura, punto E de la figura 3.38, y presenta movimiento de traslación en el resto del intervalo. La carrera
del deslizador se determina encontrado el punto inferior del eslabón 5 sobre la bisectriz, punto E’ figura 3.39,
cuando el punto P se mueve sobre su trayectoria.
Algunas curvas del acoplador permiten diseñar mecanismos con doble detenimiento. Para este procedimiento
se requiere de una trayectoria que produzca dos semirectas o dos semiarcos con radio de curvatura de igual
magnitud.
En la figura 3.40 se presenta un mecanismo cuyo punto del acoplador genera dos semirectas. Para este tipo de
trayectorias se genera un eslabón con movimiento angular sobre el que se tiene un eslabón de enlace que
desliza sobre él. El pivote fijo se ubica en la intersección de las dos semirectas. Este tipo de mecanismos tiene
el inconveniente de generar grandes aceleraciones.
3.29
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
6
C
5
2
3
1
B
D
Figura 3.38 Mecanismo con detenimiento angular a partir de una semirecta
C
2
P
3
5
SEMIARCO
BISECTRIZ
B
1
E
6
D
E’
Figura 3.39 Eslabón con movimiento lineal con detenimiento
3.30
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
Trayectoría de P
C
2
P
B
5
6
F
3
1
D
Figura 3.40 Mecanismo con doble detenimiento
En la figura 3.41 se tiene un mecanismo que genera dos arcos, x y y, cuyos centros de curvatura son, E1 y E2,
y sus radios de curvaturas son iguales. El punto P se ubica sobre la bisectriz E1 – E2 de tal forma que el ángulo
E1PE2 forme el ángulo de oscilación requerido para el eslabón de salida.
En la figura 3.42 se tiene una curva del acoplador en forma de ocho. Para este tipo de configuración se crea un
eslabón en el cruce de las dos semirectas.
En la figura 3.43 se tiene un mecanismo con doble detenimiento lineal. El punto d es el centro de curvatura
del semiarco x y el punto c el del semiarco y. La dirección del movimiento del eslabón de salida es una línea
que une estos dos puntos. Los radios de curvatura de ambos arcos son iguales.
P
x
y
2
C
3
1
A
5
B
D
F
E1
6
E2
Figura 3.41. Mecanismo con dos arcos de igual radio
3.31
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
C
2
6
B
P
1
3
A
5
D
E
Trayectoría de P
Figura 3.42 Mecanismo con doble detenimiento
Figura 3.43
3.11 APLICACIONES MÀS COMUNES DE LOS MECANISMOS ARTÌCULADOS
Existen gran variedad de aplicaciones de los mecanismos articulados. Entre las configuraciones más utilizadas
se encuentran los mecanismos de un grado de libertad de cuatro y seis eslabones. Otras configuraciones son
muy escasas.
Entre las aplicaciones de estos mecanismos se encuentran los mecanismos de retorno rápido, la generación de
líneas rectas, los pantógrafos, los mecanismos de palanca, los mecanismos de movimiento intermitente, los
reguladores de velocidad, mecanismos de transporte o de movimiento paralelo
3.11.1
MECANISMOS DE RETORNO RÁPIDO
En las máquinas herramientas se requiere que la carrera de trabajo de la herramienta sea mayor que la del
tiempo de retroceso. Con esto se logra tener menores valores de velocidad, y por ende, menores fuerzas de
corte, con lo que se conserva la herramienta. Adicionalmente, en la carrera de retorno se tiene un tiempo en el
que no se realiza un trabajo útil. En este ciclo sirve para eliminar la viruta de la herramienta.
La razón de tiempos, definida como la relación entre el tiempo de trabajo y el tiempo de retroceso, es un
parámetro importante en este tipo de aplicaciones. En la figura 3.44 se presenta el mecanismo de retroceso
rápido de una limadora común. La carrera de trabajo ocurre cuando la herramienta de corte 5 se desplaza
hacia la izquierda; esta carrera tiene lugar mientras la manivela 1 gira el ángulo α, y la de retorno mientras
gira el ángulo β. Si la manivela gira a velocidad angular constante la razón de tiempos es proporcional a la
relación α/β.
3.32
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
AVANCE
RETROCESO
F,G
5
4
E
α
ω1
A
1
B1
B2
β
B
C
2
3
D
Figura 3.44 Mecanismo de la limadora
En la figura 3.45 se presenta el mecanismo de retorno rápido de Withworth utilizado en máquinas
herramientas. La carrera de trabajo es el doble de la longitud LCD. La herramienta de corte 5 alcanza sus
posiciones limites cuando el par D se encuentra en los cuadrantes horizontales D1 y D2. En la figura se
presenta el procedimiento para obtener la relación de tiempos.
2
RETROCESO
B
A
AVANCE
E2
ω1
α
1
3
E
E1
D2
β
C
B1
5
B2
D1
4
D
Figura 3.45 Mecanismo de retorno rápido de corredera de Withworth
En la figura 3.46 se presenta el mecanismo de la mortajadora. El eslabón 1 es la manivela que gira a velocidad
angular nominal constante, el eslabón 3 es la contramanivela que gira a velocidad angular variable que mueve
a la herramienta 5 mediante la biela 4. La carrera del eslabón 5 se obtienen cuando el punto E se encuentra en
el cuadrante superior e inferior de la circunferencia de su trayectoria alrededor del apoyo fijo D. Con la
ubicación del par entre la contramanivela 3 y la biela 4 en sus posiciones E1 y E2 es posible obtener, por
3.33
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
construcción la posición de la manivela en estas configuraciones y, determinar así, la relación de tiempos
entre el ciclo de trabajo y el de retorno. La relación de tiempos para este mecanismo es aproximadamente 2:1.
RETROCESO
5
F,G
AVANCE
4
E1
3
B2
E
2
1
D
C1
C2
D
ω1
ω1
2
3
1
α
1
C
2
3
A
β
A
B
B1
E1
Figura 3.46 Mecanismo de la mortajadora: a) Mecanismo, b) posiciones límite
En la figura 3.47 se presenta el mecanismo de Withworth de retroceso rápido. En la figura se muestra el
procedimiento gráfico con el que se obtiene la relación de tiempos. Las posiciones de la manivela en la que se
presentan las posiciones límites de la herramienta 5 es simétrica con respecto al eje horizontal.
3.34
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
RETROCESO
5
AVANCE
2
B1
C
B
3
E1
α/2
ω1
E
β/2
D
E2
Figura 3.47 Mecanismo de Withworth
3.11.2 MECANISMOS PARA OBTENER MOVIMIENTOS RECTILÍNEOS
Son mecanismos de eslabonamientos destinados a conseguir que la trayectoria del punto de un eslabón
genere, exacta o aproximadamente, una recta. Estos mecanismos evitan la fricción que se produce con el uso
de correderas y guías. Algunos mecanismos obtienen una trayectoria rectilínea exacta, otros dan a la pieza un
recorrido aproximadamente recto.
MECANISMO DE SCOTT RUSELL
En la figura 3.48 se presenta el mecanismo de Scott Russell. La trayectoria del punto E se aproxima mucho a
una línea recta. La manivela 1 oscila un ángulo 2θ. Las distancias LAB, LBC, LBE, son iguales. Si el punto C se
traslada sobre la línea x-x, el punto E se movería sobre la línea y-y. El punto D se encuentra sobre la
perpendicular a la línea C-C1 y que pasa por el punto medio. EL punto E pasa por los puntos E, A y E2 y
tendrá pequeños desviaciones sobre la línea y-y. Entre mayor sea la longitud del eslabón 3 y menor el ángulo
θ menores serán las desviaciones de la trayectoria del punto E a la recta y-y.
Este mecanismo se modifica cambiando la relación entre las longitudes de los eslabones, el eslabón 1 se hace
mas corto que el eslabón 2, de esta forma se evita que la trayectoria del punto E pase por el apoyo A.
Generalmente las dimensiones de los eslabones se eligen para satisfacer la siguiente relación entre las
dimensiones:
LAB LBC
=
LBC LBE
3.35
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
y
E
B
2
1
θ
A
x
C2
C
x
θ
B2
y
3
E2
D
Figura 3.48 Mecanismo de Scott Russell
En la figura 3.49 se presenta una configuración del mecanismo de Scott Rusell modificado y se muestra la
trayectoria del punto E, se observa que es bastante aproximada a una línea recta. Esta aproximación será
mayor a menores valores del ángulo θ.
E
B
1
A
2
θ
C
C2
θ
B2
3
E2
D
Figura 3.49 Mecanismo de Scott Russell modificado
MECANISMO DE PEUCELLIER
El mecanismo de Peucellier, figura 3.50, es un mecanismo de línea recta exacta. Los eslabones 3 y 4, con
centro de rotación en Q, tienen igual dimensión. Los eslabones 2, 5, 6 y 7 tienen igual dimensión, el eslabón
1, con centro de rotación en A, tiene una longitud igual a la distancia entre apoyos A y Q. El punto P se
mueve sobre una línea recta exacta dentro de los límites constructivos. Esta afirmación puede probarse al
señalar que sí en cualquier configuración del mecanismo, la línea PP’ es siempre perpendicular a la línea AQ,
en el punto P’.
3.36
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
P
7
C
D
6
5
E
Trayectoría del
punto P
2
B
4
3
1
P'
B'
A
Q
Figura 3.50 Mecanismo de Peucellier
De la figura 3.50, se pueden establecer las siguientes relaciones:
L2QC − L2QD = L2CP − L2PD
Reagrupando términos:
L2QC − L2CP = L2QD − L2PD
L2QC − L2CP = ( LQD + LPD )( LQD − LPD )
L2QC − L2CP = LQP ⋅ LQB
Por lo tanto, el producto LQP ⋅ LQB es una constante. En la configuración del mecanismo cuando el punto pasa
por su punto medio P’ y el punto B a la posición B’, se cumple que LQP ⋅ LQB = LQP' ⋅ LQB' . Por lo tanto:
⋅
LQB'
LQB
=
LQP
LQP'
Los puntos Q, B y B’ están contenidos en una circunferencia con centro en A, por lo que el ángulo QBB’ es
recto. En los triángulos BQB’ y PQP’ el ángulo PQP’ es común, y, ya que los lados son proporcionales, los
triángulos son semejantes. Como el ángulo BQB’ es recto, también lo es el ángulo PQP’.
MECANISMO DE ROBERT
La figura 3.51 es un cuadrilátero articulado en el que las dos manivelas AB y CD son iguales y el acoplador
BC es la mitad de la distancia entre apoyos AD. El punto P pertenece al acoplador y coincide con el punto
medio de la línea de centros AD, cuando el acoplador es paralelo al bastidor. En esta configuración los
triángulos ABP, DCP, y BPC son isósceles.
3.37
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
2
B
C
3
1
D
A
P
4
4
Trayectoría de P
Figura 3.51 Mecanismo de Robert
En las posiciones cercanas a las posiciones limites, el punto P coincidirá con los apoyos A y D, y en el punto
medio de su recorrido, coincide con el punto medio de la línea AD. Las longitudes de los eslabones AB y CD
deben ser menores que 0,6 AD, y entre mayor sea, la trayectoria del punto P se aproximará más a la línea AD.
MECANISMO DE CHEBYSHEV
En la figura 3.52 se presenta el mecanismo de línea recta de Chebyshev. Las proporciones de los eslabones
son: LAB = LCD = 5, LAD = 4, LCB = 2, LCP = LPB = 1. En la configuración mostrada, el eslabón 2 se encuentra
en posición horizontal. La distancia vertical del punto P hasta los apoyos es de 4 unidades. En la
configuración que se corresponde con la posición vertical del eslabón 1 o 3, el punto P se encuentra en las
posiciones P1 y P2 respectivamente, a una distancia vertical de 4 unidades. En la figura 351se presenta la
trayectoria del punto P entre las posiciones P1 y P2, como se observa, la desviación de la trayectoria del punto
P con respecto a la línea P1 y P2 es muy pequeña.
C2
B1
P1
C
P
B
P2
2
C1
B2
3
1
D
A
Figura 3.52 Mecanismo de Chebyshev
En la figura 3.53 no hay problema en reconocer el mecanismo de Chebyshev en el mecanismo de plataforma
elevadora, la cual mantiene su paralelismo conservando su altura constante. La distancia LPQ es ½ LCD, R es el
punto medio de AD y LRQ = ½ LAD.
3.38
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
Figura 3.53 Plataforma elevadora
MECANISMO DE WATT
La primera aplicación de la que se tiene conocimiento es el eslabonamiento en línea recta de Watt el cual fue
patentado en 1784. (figura 3.54). Watt inventó su Eslabonamiento de línea recta para guiar el pistón de
carrera larga de su motor de vapor en un tiempo en el cual aun no existía maquinaria para pulir ni cortar metal
que pudiera realizar movimientos de guía rectos y largos.
C2
P2
B2
3
C
D
2
P
A
1
B
C1
P1
B1
Figura 3.54 Mecanismo de Watt
El mecanismo mostrado en la figura 3.54 se corresponde con su configuración más simple. Los eslabones 1 y
3 giran alrededor de los apoyos A y D, respectivamente, y están unidos al acoplador 2. En la posición media,
los eslabones 1 y 3 son paralelos, y el acoplador 2 es perpendicular a ambos. El punto P es un punto del
acoplador que traza una línea aproximadamente recta, dentro de ciertos límites. El principio del mecanismo es
que cuando uno de los brazos 1 o 3, desvía al acoplador de la línea recta, el otro brazo ejerce una acción
compensadora. Los segmentos BP y CP son inversamente proporcionales a las longitudes de los brazos de los
eslabones adyacentes.
En la figura 3.55 se presenta una configuración del mecanismo de Watt en la que los eslabones 1 y 3 tienen
diferentes dimensiones y el acoplador no es perpendicular a estos eslabones en su configuración media. Si se
dan: i) la ubicación de los apoyos fijos A y D, ii) la ubicación de la línea vertical por la que pasa el punto P, y
iii) la longitud del punto P, denominada como s, es posible hallar las dimensiones de los eslabones del
mecanismo y la ubicación del punto P sobre el acoplador 3.
3.39
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
C2
P2
B2
C
3
D
H
2
A
P
F
1
B
C1
P1
B1
Figura 3.55 Mecanismo de Watt
Como primer paso se trazan las líneas AF y DH perpendiculares a la línea por la que pasará el punto P. Las
longitudes de los eslabones 1 y 2 se determinan mediante las siguientes relaciones:
LAB = LAF +
s2
16 LAF
LDC = LDH +
s2
16 LDH
Con estas dimensiones se representan a los pares B y C, posteriormente se traza la línea BC y se ubica al
punto P sobre la línea que se pretende generar. Por semejanza de triángulos, es posible definir las siguientes
relaciones
LFB LFP LBP
=
=
LHC LHP LCP
Este eslabonamiento de triple balancín se usa todavía hoy en día en automóviles para guiar el eje trasero,
figura 3.56. Una de las formas es unir el montaje de Watt a un muelle helicoidal. Se caracteriza este sistema
por su buen agarre a la calzada.
Figura 3.56
3.40
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
MECANISMO DE HOEKENS
El mecanismo de Hoekens es un mecanismo manivela balancín con un punto del acoplador que genera una
trayectoria con una tramo muy cercano a una línea recta. Las relaciones de los eslabones de este mecanismo
son: LAB = 2, LAD = 4, LBC = LCD = 5, LBE = 10. En la figura 3.57 se presenta la configuración de este
mecanismo.
Este mecanismo también se caracteriza por tener una velocidad aproximadamente constante del punto E en el
tramo recto si la velocidad angular de la manivela 1 es constante.
E
Trayectoría de E
C
2
3
B
1
A
D
Figura 3.57 Mecanismo de Hoekens
3.11.3 MECANISMO DE MOVIMIENTO INTERMITENTE
El movimiento intermitente es una sucesión de movimientos y detenimientos. Un detenimiento es un lapso de
tiempo en el que el eslabón de salida permanece estacionario, en tanto que el eslabón de entrada continua
moviéndose. Hay muchas aplicaciones en maquinaria que se necesita este movimiento intermitente. Así, los
mecanismos intermitentes se caracterizan por comunicar paros temporales en cada ciclo a sus eslabones.
CRUZ DE MALTA
El mecanismo de Cruz de Malta, figura 3.58, o de Ginebra proporciona una salida intermitente a partir de una
entrada de velocidad constante. El mecanismo está formado por dos discos. Un motor a velocidad constante
impulsa la entrada. El de entrada está graduado al que se le acopla un pasador B. El otro disco dispone de una
serie de ranuras radiales (cómo mínimo 3) formando un ángulo entre ellos. Durante el giro entorno al eje de
entrada engranará con una de las deslizaderas de la rueda de salida obligándola a describir un giro hasta que
deje de contactar con la deslizadera. Transcurrido un cierto ángulo de la entrada volverá a engranar con otra
ranura, con lo que el movimiento de la rueda de salida se reanudará. El resultado es la rotación intermitente de
la rueda de Ginebra. El cuerpo 3, solidario al eslabón conductor 1, sirve para frenar a la rueda 2 cuando el pin
B se encuentra fuera de las guías.
El número de ranuras determina el número de detenciones del mecanismo, y el tamaño de la rueda limita el
número máximo de paros o detenciones. Las relaciones geométricas de la cruz de malta regular son:
r = L ⋅ sin π n
donde L es la distancia entre los centros de la cruz de Malta, r es el radio de la manivela, y n es el número de
ranuras radiales
3.41
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
1
ω1
B
2
A
C
3
Figura 3.58 Cruz de Malta
MECANISMOS DE TRINQUETE
Una rueda, provista de los adecuados dientes, que recibe movimiento circular intermitente de un órgano
oscilante o alternativo es llamada rueda de trinque. En la figura 3.59 se muestra una forma sencilla de este
mecanismo. El brazo de empuje 2, pivotea sobre el eje de la rueda dentada y entonces el eje se mueve hacia
atrás y hacia delante para accionar la rueda 1. La uña de empuje del brazo 2, hace girar la rueda dentada en
sentido antihorario y no trabaja durante el movimiento de regreso del brazo en sentido horario. La uña de
retén, 3, impide que la rueda del trinquete cambie de dirección de giro mientras regresa la uña de empuje. Se
utiliza en llaves de trinquete para tuercas, montacargas...
3
2
1
ω2
Figura 3.59 Mecanismo de trinquete
Encontramos ejemplos corrientes de este mecanismo en las bicicletas (el llamado piñón libre), o en los
mecanismos de dar cuerda a los relojes, o el freno de mano de un coche que tenemos en la siguiente figura
3.60. Cuando el conductor desea soltar el freno de mano empieza tirando un poco más de la palanca de freno
para contrarrestar la fuerza sobre el trinquete y después pulsa el botón del extremo de la palanca para alzar el
trinquete de retención del arco dentado del freno.
3.42
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
Figura 3.60 Freno de mano
EL PANTOGRAFO
El pantógrafo es un mecanismo articulado de cuatro eslabones dispuestos tal que formen un paralelogramo tal
como se ilustra en la figura 3.61. La ubicación de los puntos P y Q es tal que la línea que los une pasa por el
apoyo fijo A. Al darse un movimiento cualquiera del punto P, el punto Q describe una trayectoria semejante
ampliada. La relación de amplificación es dada por la relación de las distancias de los puntos mencionados
hasta el punto A.
Q1
C1
B1
B2
P1
A
C2
D1
P2
D2
Q2
Figura 3.61 Mecanismo de pantógrafo
En la configuración mostrada, el punto P, ubicado sobre el eslabón CD, se traslada desde P1 hasta P2 por una
trayectoria deseada. De la figura se deduce:
AP1 B1C1
=
AQ1 B1Q1
También se satisface:
AP2 B2 C2
=
AQ 2 B2 Q 2
3.43
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
Dado que la distancia entre los pares B y C es constante, se tiene:
B1C1 = B2 C2 y B1Q1 = B2 Q 2
Por lo que se cumple:
AP1 AP2
=
AQ1 AQ2
Es decir que la relación de las distancias de los puntos P y Q hasta el apoyo A es constante. Ya que los
triángulos ABQ y PCQ son semejantes en todas las posiciones, el punto P siempre estará sobre la recta que
une los puntos A y Q. Por lo que los movimientos angulares de los puntos P y Q alrededor de A son los
mismos. El movimiento de los puntos P y Q alrededor del apoyo A, puede ser descrito por un ángulo y un
radio vector. Ya que los movimientos angulares de los puntos alrededor de A son los mismos y las distancias
hasta el punto A conservan siempre la misma proporción, la trayectoria del punto Q es semejante a la del
punto P pero amplificada.
YUGO ESCOSES
El yugo escoses es un mecanismo para convertir el movimiento de rotación de una manivela en un
movimiento lineal o viceversa, figura 3.62. El pistón, u otra pieza reciprocante, está directamente acoplado al
deslizador del yugo mediante una ranura sobre el que desliza el pin de la pieza rotacional.
3
2
1
Figura 3.62 Yugo escocés
La ventaja de este mecanismo comparado con el mecanismo manivela acoplador deslizador consiste en que
permite:
•
•
•
•
Par de salida altos con un cilindro de tamaño pequeño.
Pocas partes móviles.
Operación más suave
Mayor porcentaje en el tiempo de espera en el punto muerto superior con lo que se mejora la
eficiencia del mecanismo
3.44
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
In an engine application, elimination of joint typically served by a wrist pin, and near elimination of piston
skirt and cylinder scuffing, as side loading of piston due to sine of connecting rod angle is eliminated.
Entre las desventajas están
• Desgaste rápido de las ranuras en el yugo causado por la fricción de deslizamiento y las presiones de
contacto altas.
• Menor porcentaje del tiempo de espera en el punto muerto inferior reduciendo el tiempo de vacío
para los motores de dos tiempos.
• La forma del movimiento del pistón es una onda seno pura si se tiene velocidad angular constante.
MECANISMOS DE PALANCA
Cuando el mecanismo manivela acoplador deslizador se acerca al punto muerto superior indicado por las
posiciones de los eslabones 3, 4 y 5 de la figura 3.63, hay un aumento rápido de la relación entre la resistencia
Q y la fuerza vertical en el par B, P. En la configuración mostrada, α es el ángulo de los eslabones 2 y 3 con
la línea de acción de C.
A
1
B
6
2
P
Q
6
E
C
4
α
5
3
D
6
Figura 3.63 Mecanismo de palanca
Si los eslabones 2 y 3 tienen igual longitud, se cumple:
P
= 2 tan α
Q
Este medio de vencer una gran resistencia con una fuerza pequeña formando un ángulo llano entre dos
eslabones es conocido como efecto de palanca. El mecanismo de palanca se utiliza en distintas
configuraciones en quebrantadoras, prensas, remachadoras neumáticas, alicates, embragues de fricción, etc.
ACOPLE DE OLDHAM
El acople de Oldham es un acoplamiento flexible utilizado para transmitir velocidad angular constante
uniforme entre ejes paralelos, figura 3.64.
3.45
SÍNTESIS DE MECANISMOS CAPÍTULO 3 MECANISMOS DE CUATRO ESLABONES
Figura 3.64 Acople de Oldham
ACOPLE DE HOOKE O JUNTA UNIVERSAL
Esta junta, figura 3.65.a, es un mecanismo esférico empleado para conectar dos ejes que se cortan, se utiliza
más ampliamente en el sector automotriz. Tiene, en esencia, la forma mostrada en la figura 3.65.b; consta de
dos horquillas circulares, 2 y 4, articuladas mediante la cruceta rectangular 3. Considerando la mitad de la
horquille b de 2, y df de 4, están unidos por el eslabón bd, formando así un mecanismo espacial concéntrico.
El eslabón conductor 2 y conducido 4 dan giros completos en el mismo tiempo, aunque la relación de
velocidad es variable.
Fig 3.65 Acople de Hooke
Por relaciones trigonométricas se puede establecer la siguiente relación entre los ángulos de rotación de los
eslabones 2 y 4:
tan φ = cos β ⋅ tan θ
La relación de velocidades angulares se obtiene diferenciando esta relación:
ω4 d φ cos β ⋅ sec 2 θ cos β ⋅ sec 2 θ
cos β ⋅ sec 2 θ
=
=
=
=
2
2
ω2 d θ
sec φ
1 + tan φ
1 + cos 2 β ⋅ tan 2 θ
La última igualdad, se obtiene reemplazando la relación entre los ángulos θ y φ. Simplificando términos, se
obtiene:
ω4
cos β
=
ω2 1 − sin 2 β ⋅ sin 2 θ
3.46
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
Ya que la función sin2 θ, varía entre 0 y 1, la relación de velocidades angulares varía entre cos β y 1/ cos β, ya
que el ángulo β es el ángulo que forman los ejes conectados y es constante.
MECANISMO ARTICULADO DE PARALELAS
Estos son aplicaciones del mecanismo articulado de cuatro eslabones, en el que sus eslabones forman un
paralelogramo. La máquina universal de delineación, figura 3.66, es un ejemplo de su uso actual por la
combinación de los paralelogramos ABCD y EFGH en los que el anillo de acoplamiento CDEF es una
característica importante. Este anillo guía a la cabeza P. Las dos reglas graduadas 1 y 2 son solidarias y
perpendiculares entre sí, y pueden girar sobre P. Por medio de un cículo graduado y un tornillo de presión es
posible inclinarlas para que formen el ángulo que se desee con un línea determinada, con lo que también sirve
de transportador de ángulos.
A
B
1
G
P
E
2
H
D
C
F
Figura 3.66 Máquina universal de delineación
Una de las aplicaciones más comunes de los mecanismos articulados de paralelas es para el transporte de
movimiento de materiales. Al obtener mecanismos con paralelogramos, se tienen eslabones con movimiento
en el plano sin girar. En la figura 3.67 se presenta un mecanismo en el que se obtiene el movimiento
intermitente del material transportado. La característica fundamental del movimiento es que todos los puntos
del elemento móvil del transporte, eslabón 4, describen trayectorias idénticas.
8
8
4
3
8
8
1
5
2
6
Figura 3.67
3.47

![Evaluación%20Grado%20Decimo%20noveno%20y%20undecimo[1].](http://s2.studylib.es/store/data/000860011_1-723727629aa8ab5007657ff23e4e4a09-300x300.png)