CAMPO NORMAL DE LA GRAVEDAD
Anuncio

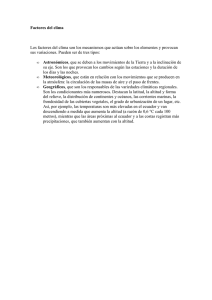
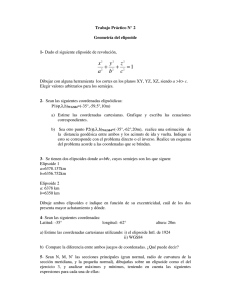
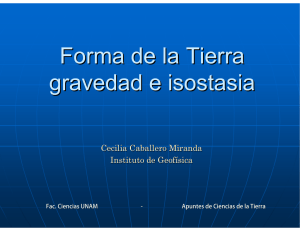
Tema 3. Campo normal . Elipsoides. Altitudes Tema 3 CAMPO NORMAL DE LA GRAVEDAD 75 3.1 Aceleración de la gravedad. Fórmula de Clairaut de 1er orden. En el tema 2 hemos resuelto el valor del potencial de la Tierra (U), estableciendo para ello diferentes hipótesis y aproximaciones. En este capítulo resolveremos una aproximación a los valores de la aceleración de la gravedad (γ) generados por los potenciales teóricos de la Tierra U. Como ya sabemos la gravedad en el punto P viene dado por el gradiente del potencial en dicho punto g = ∇W (3.1) siendo g el vector de la gravedad observado en el punto P y W el potencial real de la Tierra. Si sustituimos W por U que es el potencial de la gravedad teórico, del cual hemos resuelto diferentes aproximaciones en el tema anterior, obtendremos un valor aproximado para la aceleración de la gravedad, en este caso la aceleración de la gravedad la designaremos por γ γ = ∇U (3 . 2 ) De las diferentes componentes que podemos resolver de la aceleración γ (γr,γθ,γλ), vamos a establecer que γθ,= 0 y γλ=0, debido a que el valor de estas componentes es muy pequeño en comparación con γr, con lo que finalmente tenemos que, γ = ∇U = ∂U ∂r (3.3) en el caso que utilicemos como aproximación del potencial U la fórmula (2.82) obtendríamos γ con una aproximación de 1er orden γ = ∇U = ∂U GM =− 2 ∂r a a 2 3 a 4 r 2 2 − J 2 3sen ϕ − 1 − m cos ϕ 2 r a r ( ) (3.4) Ahora pasemos a resolver el valor de la gravedad sobre un elipsoide que es la forma regular que más se aproxima a la Tierra. Esta operación nos permite establecer el valor 76 Tema 3. Campo normal . Elipsoides. Altitudes de r en función de a, ya que sobre el elipsoide se resuelve que r = a (1- α sen2 ϕ )1 quedando (3.4) γ =− ( )( ) ( )( GM 2 −2 3 2 2 −4 2 2 (1 − α sen ϕ ) − J 2 3 sen ϕ − 1 1 − α sen ϕ − 2 m 1 − sen ϕ 1 − α sen ϕ 2 2 a ) (3.5) En el ecuador la aceleración tendrá un valor de: γe =− GM a2 3 1 + 2 J 2 − m (3.6) Operando en (3.6) γe GM =− 2 3 a 1 + J2 − m 2 (3.7) Sustituyendo este valor en (3.5) y tomando términos de primer orden 9 2 γ = γ e 1 + 2α + m − J 2 sen 2 ϕ según Udias (1997) resulta (3.8) La expresión resuelta da el valor de la γp gravedad normal en aproximación de primer orden, en un punto de la superficie del elipsoide, en función de γe su valor en el ecuador. Teniendo en cuenta que el valor máximo de la gravedad se da en el polo (γp) y el mínimo le corresponde Fig.3.1. al ecuador γe,, podemos establecer según Udias (1997) que el valor γ se puede resolver estableciendo que los valores de la aceleración de la gravedad se ciñen a la curva de una elipse γ = γ e [1 + β sen 2 ϕ ] (3.9) Siendo β 1 * En la bibliografía podemos encontrar el aplanamiento designado tanto por α como por f 77 β= γ p −γe γe (3.10) Por analogía de (3.8) con (3.9) podemos establecer que 9 2 β = 2α + m − J 2 (3.11) La cual se conoce como la fórmula de Clairaut. Si sustituimos J2 de (2.89) en la fórmula de Clairaut (3.11) obtenemos 5 2 α= m−β (3.12) estableciendo esta ecuación que la forma de la Tierra que vendría resuelta por el aplanamiento del elipsoide α, se puede obtener a través de m y β siendo estos parámetros, parámetros físicos o constantes dinámicas los cuales dependen de cómo esta distribuida la masa de la Tierra. Otra deducción que podríamos obtener es que se puede obtener la forma de la Tierra midiendo la gravedad sobre ella (como mínimo hacen falta dos puntos). 3.2. Elipsoide de nivel. Campo normal de la gravedad. Para la determinación del campo exterior de la gravedad se requiere el establecer un sistema de referencia gravimétrico (al igual que en geodesia se utiliza el elipsoide como figura de referencia para reducir las medidas, en geofísica se establece una superficie de referencia para los valores de gravedad), el cual es conocido como campo normal de la gravedad. El origen o fuente de este campo es generado por un modelo de Tierra el cual representa una figura normal de la Tierra (cuando hablamos de “normal” nos referimos a una superficie con una definición geométrica regular). Un modelo estándar de referencia de Tierra ya sea geodésico o gravimétrico debe garantizar un encaje o ajuste bastante aproximado con la superficie de la Tierra y con el campo de gravedad externo de la Tierra, pero no hay que olvidar que este modelo estándar debe tener una facilidad de uso, facilitar un cálculo rápido y sencillo de los valores de la gravedad. 78 Tema 3. Campo normal . Elipsoides. Altitudes A este respecto la figura normal que mejor se ciñe a estas condiciones es un elipsoide de ω b a M Fig.3.2 revolución (descrpición geométrica) o elipsoide de nivel (descripción potencial). Para definir esta figura hay que establecer por una parte su geometría que viene dada por el semieje mayor a y su aplanamiento α o f y por otra parte sus parámetros físicos la masa M y su velocidad angular de rotación ω. El campo de la gravedad originado sería fruto de la gravitación y rotación del elipsoide. Veamos algunas propiedades del campo potencial generado por el elipsoide definido. ¾ La superficie del elipsoide es una superficie equipotencial, U(r)=U0 , dentro del campo de gravedad de este modelo. ¾ El campo de la gravedad presenta simetría respecto al eje de rotación y respecto al plano ecuatorial. ¾ De acuerdo con el Teorema de Poincare-Stokes, el campo de la gravedad exterior a la superficie de nivel del elipsoide queda completamente determinado por los cuatro parámetros, a, α, M y ω. ¾ Las superficies potenciales normales Fig.3.3 no son elipsoides, a excepción del propio U=U0 Elipsoide elipsoide de nivel. superficies son conocidas superficies esferopotenciales, Estas como las cuales se definen como superficies cuasi esféricas. El mismo elipsoide de U=cte nivel es una particularización de una 79 superficie esferopotencial (tiene forma de elipsoide). ¾ En el caso del elipsoide estándar se le presupone una densidad homogénea para todo su volumen aunque se puede aproximar el campo de gravedad de un elipsoide de nivel por una distribución de masas estratificada (Torge,1989). 3.3. Aproximaciones de orden superior y figuras triaxiales. A lo largo de este capítulo y del anterior hemos visto diferentes aproximaciones al potencial de la gravedad y de la aceleración de la gravedad bajo diferentes supuestos (una Tierra esférica, elipsoidal,etc...) y precisiones, pero en definitiva todas las aproximaciones tienen como ecuación general la (2.82), lo que les diferencia es el número de términos utilizados: Aproximación de orden cero (consideramos una Tierra esférica): En la primera aproximación al potencial de la Tierra partimos del supuesto de una Tierra esférica (2.48). Si en (2.82) establecemos que f=0 (2.87) y J2=0 (2.80), entonces se resuelve que (2.48) es igual a (2.82). U (0) GM = a a m r 2 2 + cos ϕ r 2 a (2.48) La aceleración la obtenemos a partir de (3.8) siendo α=0 y J2=0 por hallarnos ante una Tierra esférica. γ ( 0) = γ e (1 + m sen 2 ϕ ) (3.13) y γ e( 0) = − GM (1 − m) a2 (3.14) Aunque se considera que las masas que están generando el potencial de la gravedad tienen una configuración de esfera, la superficie potencial U(0) generada tiene forma de un elipsoide de revolución como hemos visto en el capítulo 2.4. Si pretendemos realizar una evaluación de las diferentes aproximaciones a la forma de la Tierra 80 Tema 3. Campo normal . Elipsoides. Altitudes estableceríamos esta como la menos aproximada de las vistas y con una desviación máxima de la figura de la Tierra de 21 Km. Aproximación de primer orden (elipsoide): Para resolver el valor del potencial U utilizamos la ecuación (2.82) GM U = a 2 a J 2 a 3 m r 2 2 − 3 sen ϕ − 1 + cos ϕ 2 a r 2 r ( ) (2.82) Y para resolver el valor de la aceleración según este modelo de Tierra las aproximaciones vistas en el capítulo anterior sustituyendo en (3.9) el valor de β (3.12) obteniéndose: 5 2 γ (1) = γ ( e ) 1 + m − α sen 2 ϕ γ e(1) GM 3 = − 2 1 + J 2 − m a 2 (3.13a) (3.14a) En la aproximación de primer orden, se mantiene la independencia respecto a la longitud λ y solo se considera el primer orden en α y m. Por supuesto la forma geométrica que presenta la superficie equipotencial generada por esta distribución de masas elipsoidal es la de un elipsoide, con un aplanamiento α=3/2 J2+m/2. En el caso de la aproximación de primer orden nos encontramos con una superficie de mayor similitud a la figura de la Tierra con desviaciones respecto de la forma real de la Tierra de unas decenas de metros. Aproximación mediante un desarrollo en Armónicos Esféricos de Superficie. La función potencial de la gravedad resuelta mediante un desarrollo en armónicos esféricos de superficie presenta una gran aproximación al campo potencial real de la Tierra. El orden de esta aproximación depende del grado y orden del polinómio. V (r ) = GM r l ∞ a l + 1 ∑ ∑ (Cl , m cos mλ + Sl , m sen mλ )Pl , m (cosθ ) l = 2 r m = 0 (2.97) 81 Podemos decir que es la mejor aproximación a la figura de la tierra que podemos establecer. Normalmente al polinomio y al conjunto de términos se le conoce como modelo geopotencial, siendo varios los modelos geopotenciales existentes y utilizados. Elipsoide de nivel o de referencia. Para resolver los valores de referencia de la gravedad hay que calcular en un primer lugar el potencial generado por un elipsoide, para lo cual hay que pasar por resolver la ecuación diferencial de Laplace (2.31) de la cual vimos que una solución de esta θ λ viene dada por la ecuación (2.97). ϕ Esta la podemos particularizar si se Fig.3.4. establece que el campo presenta simetría con respecto al eje de rotación y del plano ecuatorial, esto implica una particularización de (2.97) ya que desaparecen los términos o coeficientes de λ de la ecuación. GM U= r l ∞ ω 2 2 a ( ) + 1 C P cos θ r sen 2 θ ∑ + l ,0 l ,0 r 2 l = 2 (2.14) Los coeficientes Cl,0 convergen rápidamente, con lo cual la serie se puede truncar a partir de l=6. Si en lugar de utilizar coordenadas geocentricas utilizamos coordenadas elipsoidales, relación que se estableció en el capítulo 2.7.1 podemos obtener una fórmula cerrada del valor de la aceleración de la gravedad Esta fórmula es conocida como la fórmula de Somigliana γ0 = 82 aγ e cos 2 ϕ + bγ p sen 2 ϕ a 2 cos 2 ϕ + b 2 sen 2 ϕ (3.15) Tema 3. Campo normal . Elipsoides. Altitudes Donde γe y γp son los valores de la gravedad normal en el ecuador y en el polo respectivamente, aquí la gravedad normal que depende de la latitud está representada por los cuatros parámetros a, b, γe,γp lo cual no se contradice con los parámetros dados anteriormente ya que se hallan relacionados por el teorema de Pizzetti: 2 γa a + γ b 3GM b = 2 ab − 2ω 2 (3.16) Reafirmando de nuevo el teorema de Clairaut el cual establece que son cuatro los parámetros las cantidades independientes. La gravedad normal en el espacio exterior puede ser aproximada en una zona cercana al elipsoide por la diferenciación de γ respecto de h (la altitud respecto al elipsoide). 3.4.Formulas normales de la gravedad. Las fórmulas normales de la gravedad describen la gravedad como función de la latitud geodésica ϕ y la altura h respecto a un modelo particular de la Tierra (elipsoide). En las fórmulas desarrolladas desde 1900, se establece el valor de la gravedad en función de la latitud, γ 0 = γ e (1 + β sen 2 ϕ − β 1 sen 2 2ϕ ) (3.17) La cual se diferencia de (3.8) en que en este caso si se ha tenido en cuenta los términos de segundo orden. Donde β1 se calcula mediante el aplanamiento α (2.87)y m(2.49). 1 8 β1 = − α 2 + 5 fm 8 (3.18) La ecuación (3.17) proporciona una resolución numérica del valor normal de la gravedad con una precisión de 1µms-2 lo cual es suficiente para muchas aplicaciones. Las fórmulas que se han aplicado con mayor amplitud se muestran en la tabla γ nombre β β1 α (ms-2) Helmert (1901) 9.7830 0.005302 0.000007 1:298.3 U.S. Coast and Geodetic 9.78039 0.005294 0.000007 1:297.4 Survey 83 Intern. Gravity Formula 9.78049 0.0052884 0.0000059 1:297.0 Geod. Ref. System 1967 9.780318 0.0053024 0.0000059 1:298.247 0.0053024 0.0000058 1/298.257 (incl. atmosfera) 9.780327 Geod. Ref. System 1980 (incl. atmosfera) La figura muestra como varia la gravedad con la Latitud: aceleración m/s-2 gravedad norm al 9.84 9.82 9.8 9.78 9.76 9.74 0 10 20 30 40 50 60 70 80 90 Latitud 3.5 Sistema Geodésico de Referencia 1980. En 1979, la Asociación Internacional de Geodesia introdujo el Sistema Geodésico de Referencia 1980 (GRS80), Torge (1989), el cual consiste en un elipsoide de nivel geocentrico con su campo de gravedad normal asociado el cual esta definido por los parámetros: radio ecuatorial de la Tierra a= 6 378 137 m constante geocentrica gravitacional GM= 398 600.5 x 109 m3 s-2 Factor dinámico de la Tierra, excluyendo la deformación permanente provocada por la marea, factor que trataremos en un próximo tema. J2= 1 082.63 x 10-6 y finalmente la velocidad angular de la rotación de la Tierra ω= 7.292 115 x 10-5 rad s-1 A partir de los datos anteriores mediante las relaciones establecidas en el teorema de Clairaut y Pizzetti podemos obtener: semieje menor del elipsoide b= 6 356 752.3 m 84 Tema 3. Campo normal . Elipsoides. Altitudes aplanamiento geométrico α= 1:298.2572 potencial normal del elipsoide: U0= 6.263 6861 x 107 m2 s-2 Coeficientes de los armónicos esféricos C4,0=2.370 91 x 10-6 C6,0=-0.006 08 x10-6 C8,0= 0.000 01 x 10-6 Gravedad normal en el ecuador y polo γe= 9.780 3268 ms-2 γp= 9.832 1864 ms-2 aplanamiento gravimétrico β= 0.005 302 440 3.6. Altitudes. superficies de referencia y geoide. 3.6.1.Introducción. En el campo potencial para situar un punto lo hemos referido a nuestro sistema de referencia cuyo origen generalmente lo hemos ubicado en el centro de masas de la Tierra, y las coordenadas utilizadas han sido bien las coordenadas esféricas o las geodésicas. En todas ellas utilizamos la latitud, longitud y el radiovector del punto. Correspondiendo cada una de estas coordenadas a una definición geométrica clara. Este forma de referenciar los puntos no tendría mayor problema si presentara un paralelismo con el campo potencial de la gravedad real, este carácter de no paralelismo se acentúa más en las direcciones en las cuales el campo de gravedad varia con mayor rapidez (gradiente de la gravedad), o sea las mediciones que se realicen a lo largo de la línea de la plomada (altitudes). Este no paralelismo en la medición de altitudes es el que vamos a tratar en este capítulo, así como las superficies de referencia que existen (elipsoide (teórica), geoide (real), etc.) y la relación entre ellas. 3.6.2. Superficies de referencia y altitudes. 85 Un punto en el espacio queda determinado por tres coordenadas, latitud, longitud y distancia. Esta distancia puede ser tratada de forma diferente, pudiendo descomponerse en diferentes partes e incluso quedarnos con la parte representativa de ella. Es lógico pensar que la descomposición de la distancia que vamos a realizar este relacionada con las superficies de trabajo que hemos definido con anterioridad. Una superficie era la generada por el potencial real de la Tierra W0. Esta superficie hemos dicho que es la forma real de la Tierra. Esta superficie tiene una representación real, y viene dada por el nivel medio de los mares, esta superficie presenta un valor de potencial constante, se conoce como geoide. Se define el geoide como la superficie potencial que coincide con el nivel medio de los océanos y que se prolonga por debajo de los continentes. Diferentes altitudes Fig.3.5. Otra superficie de trabajo que hemos adoptado es una superficie regular, con P Geoide W0 Superficie real _ _ una definición matemática sencilla, la cual establecimos como superficie de referencia sobre la cual era posible trabajar (simplicidad en las formulas matemáticas) y tenía una forma muy aproximada a la ϕ Tierra, el elipsoide. λ Elipsoide U0 Superficie teórica __ Con lo cual vamos a referir la tercera coordenada a cualquiera de estas dos superficies, las cuales las vamos a considerar como de nivel cero. Llegados a este punto estamos en condiciones de definir la altitud de un punto. Se define la altitud de un punto como la distancia de ese punto a cada una de estas superficies medidas a lo largo de sus normales, no teniendo porque coincidir la representación de la altura con una línea recta. En verdad estamos midiendo el camino que recorrería un objeto abandonado al vacío y expuesto a una gravedad (ya sea teórica o real). 3.6.3. Altitudes elipsoidales. 86 Tema 3. Campo normal . Elipsoides. Altitudes Las alturas elipsoidales (h) tienen una definición geométrica y son independientes del campo de la gravedad real de la Tierra, y se resuelven obteniendo la distancia que existe entre el punto considerado P y la superficie del elipsoide a lo largo de la normal. dU = −γ dh (3.19) Globalmente h se obtiene mediante mediciones de satélite con precisión de 1 m. No obstante los ∆h se pueden obtener mediante observaciones simultaneas con precisiones de hasta cm en el ámbito de los km. Sin embargo como ya habíamos adelantado, las superficies con h=const. tienen una desviación considerable respecto del campo de la gravedad, la desviación media global Altitud elipsoidal es de 30 m. Fig.3.6. Si P Geoide W0 Superficie real _ _ tenemos en cuenta que el incremento de la función potencial es γ igual al gradiente de la función potencial en la dirección considerada por el incremento de la distancia ϕ Podemos resolver que la altitud λ Elipsoide U0 Superficie teórica __ h= U0 − U P γ elipsoidal se puede obtener por la diferencia (3.20), siendo γ = de 1 P γ dh h ∫0 los valores del (3.21) potencial. Siendo γ el valor medio de la gravedad normal entre el elipsoide y el punto considerado 3.6.4. Alturas en el campo de la gravedad. altitud Fig.3.7. En el campo de la gravedad se define la altitud de un punto como la P Geoide W0 Superficie real _ _ distancia existente entre el punto considerado P y la superficie del geoide medida a lo largo de la normal de este. ϕ λ Elipsoide U0 Superficie teórica __ 87 Al contrario que el elipsoide, la altitud en el campo de la gravedad tiene una resolución geométrica complicada por lo cual hay que acudir a conceptos dinámicos para resolver la altitud, según hemos visto en (3.19) podemos establecer que H= W0 − W P g (3.22) siendo g = 1 H H ∫ g dn (3.23) 0 Expresiones en las que más tarde haremos hincapié. Analicemos como se resuelven las altitudes mediante operaciones topográficas y si estas constituyen una aproximación correcta a la altitud propiamente dicha. En topografía para resolver el incremento de cota existente entre dos puntos con cierta Fig.3.8. W4 dn4 W5 dn3 W2 dn2P dn2 W1 W0 dn4P dn3P dn1P dn1 precisión se suele utilizar la nivelación geométrica, la cual consiste en la obtención incrementos de altitud sucesivos, la suma de estos incrementos sucesivos resolvería el desnivel existente entre dos puntos. La pregunta que nos planteamos ahora es si el método es valido, para ello acudimos a la definición de altitud, la cual especifica que la distancia debe ser medida a lo largo de la normal al geoide, con lo cual nosotros al realizar un itinerario los incrementos de altura no se van a tomar sobre la normal al geoide si no sobre las diferentes normales sobre las cuales se va desarrollando el itinerario, esto en principio no presentaría mayor problema si las superficies equipotenciales fueran paralelas, quiere decir que en cada estacionamiento estamos midiendo incrementos de cota en una dirección diferente a la normal del punto del cual queremos conocer la cota, además los W no se corresponden con n. En definitiva los incrementos de potencial permanecen constantes mientras que los incrementos de cota o dn dependen del camino elegido. ∆W = cte. 88 y dnx ≠ dnxP (3.24) Tema 3. Campo normal . Elipsoides. Altitudes Siendo dnxP los incrementos obtenidos sobre la normal del punto P. El procedimiento de nivelación topográfica nos permitiría obtener lo que se conoce como ‘altitud de desniveles sin corregir’ (ASC) según Udias 1997. N ASC = ∑ dnx (3.25) x =1 siendo N el número de niveladas. Esta ASC no suele coincidir con la altitud, aunque en algunas zonas la diferencia de estas sean tan pequeñas que se halle por debajo de la precisión del instrumental utilizado. Esto quiere decir que cuando se realice una nivelación cerrada para obtener ASC el valor de cierre no será 0, independientemente del instrumental utilizado, si no que estará en función del camino utilizado. Según lo expuesto llegamos a la conclusión de que no es posible obtener altitudes H propiamente dichas mediante la observación de incrementos de cota, con lo cual vamos ha ayudarnos de observables dinámicos para poder resolver la cota, es decir acudiremos a la definición de altitud que se resuelve mediante la fórmula (3.22) y (3.23), en las cuales es necesario resolver en primera instancia WP. N W p = W0 + ∑ dW j (3.26) x =1 siendo dWx los incrementos de potencial entre el Geoide y el punto P, que según (3.19) dW = − g .dn (3.27) Con lo cual hemos resuelto el potencial de P. Este valor no depende de la trayectoria escogida para llegar a P, el valor WP es independiente del camino, esta propiedad es la que debería poseer la altitud (sabemos que entre dos puntos el flujo será de el punto de menor potencial al de mayor potencial , en cierta medida nosotros hemos asimilado el concepto de flujo entre cotas, pero en verdad viene dado por los potenciales de los puntos). Quiere decir que de alguna forma el potencial o el incremento de potencial se puede utilizar como cota, de hecho vamos a definir la cota geopotencial o número geopotencial como la diferencia en potencial entre el punto y el geoide. P C = W0 − WP = ∫ g dn (3.28) 0 89 Sin embargo la práctica requiere la utilización de un sistema métrico por ser este sistema más intuitivo y extendido ya que hay que tener en cuenta que muchas de las nivelaciones realizadas no son acompañadas con valores de la gravedad ya que la repercusión de estos es muy baja. Con lo cual conviene resolver la altitud mediante la ecuación (3.22) y (3.23) H W0 − W P 1 H= (3.22) siendo g = ∫ g dn (3.23) g H 0 g es la gravedad media medida entre el geoide y el punto P. Esta gravedad media no se puede resolver, ya que no podemos medir la gravedad a lo largo de la normal de un punto ya que la presencia de la superficie física de la Tierra entre el punto y el geoide lo impide, con lo cual lo único que se puede realizar es una aproximación. Otro problema que aparece es que en la ecuación (3.23) aparece la altitud H como limite de la integral, siendo justamente este el termino que estamos buscando. Veamos que posibles aproximaciones podemos establecer para salvar estos problemas. La primera aproximación que podemos realizar es sustituir el valor medio de la gravedad g por otro conocido. En el caso que lo sustituyamos por el valor normal de la gravedad a 45º, se obtiene lo que se conoce por altitud dinámica H din = 90 1 γ 45 º N ∑ g dn x =0 (3.28) Tema 3. Campo normal . Elipsoides. Altitudes Esta altitud es una altitud que no se suele utilizar mucho debido a que no tiene un Superficie Tierra P g Teluroide UQ=WP ζ U=UQ Q HN Geoide W=W0 Elipsoide U=U0 Fig.3.9. Q0 γ0 significado físico muy exacto produciendo una falsedad en los datos notable. Otra definición de altitud o altitud aproximada, es la que se conoce como altitud normal. Previa a la definición de la altitud dinámica propuesta por Molodensky definamos una superficie auxiliar conocida como Teluroide y repasemos ciertos conceptos. En este tema hemos resuelto que como superficie de referencia, la figura idónea era un elipsoide, este elipsoide lo hemos definido con el mismo potencial que tiene el geoide U 0 =W0 (3.29) Ahora estableceremos una superficie auxiliar de referencia, el Teluroide la cual se define como la superficie potencial (no equipotencial) que tiene como valor potencial normal Uteluroide, el potencial real de la superficie de la Tierra Wsuperficie Tierra. U teluroide = WSuperfcie Tierra (3.30) Se define la altitud normal de un punto HN, como la distancia existente entre su proyección en el elipsoide (0) y la proyección en el Teluroide (Q) (fig.3.9), Por (3.19) y (3.20) podemos establecer: HN = U0 − UQ γ = W0 − WP γ (3.31) 91 Siendo γ la gravedad media entre los dos puntos. γ = 1 γ dn HN ∫ (3.32) En este caso podemos aproximar (3.32) por γ = γ 1 − HN R (3.33) Que sustituyendo en (3.31) obtenemos N HN = ∑ g dn x =1 x x H γ 1 − n R (3.34) Para resolver la altitud normal hay que resolver la ecuación cuadrática (3.34). Observando la fig.3.9. vemos que si dispusiéramos de ζ podríamos relacionar la altitud dinámica con la elipsoidal ya que h = HN +ξ (3.35) conociéndose ζ como anomalía de la altura, está se puede resolver por (3.36). ζ = UQ − U P γQ = WP − U P γQ (3.36) La ultima aproximación a la altitud, la cual se considera más exacta viene dada por la altura ortométrica la cual se define como la distancia que existe entre el punto P y el geoide medida a lo largo de la normal al geoide o línea de la plomada. Para obtener la altitud ortómetrica hay que resolver la ecuación (3.22) y (3.23), para resolver (3.23) lo que es calcular un valor aproximado de la gravedad real mediante lo que se conoce reducción de la gravedad , la reducción es el proceso mediante el cual tomando valores de la gravedad en una parte diferente a la superficie del geoide podemos calcular el valor que tendría sobre el geoide, problema que abordaremos en el siguiente tema, en 92 Tema 3. Campo normal . Elipsoides. Altitudes concreto se utiliza la de Poincare-Prey. Finalmente la expresión que adquiere la altitud ortométrica es N H= ∑g x =1 i dn x (3.37) g + 0.0424 H para resolver la altitud ortométrica hay que resolver la ecuación cuadrática que se plantea en (3.37). Al igual que la altitud dinamica, en la altitud ortómetrica si somos capaces de resolver el segmento N conocido como ondulación del geoide, podremos establecer la relación entre altitud elipsoidal y altitud ortométrica ya que h=H+N (3.38) Sin embargo la forma de obtener la ondulación del geoide N no es tan inmediata como en los casos anteriores, problema que abordaremos en el próximo tema. Superficie Tierra P g Teluroide UQ=WP U=UQ Q H Geoide W=W0 N Elipsoide U=U0 γ0 Q0 93