3. APLICACIONES DE LAS INTEGRALES MÚLTIPLES
Anuncio

75
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
3. APLICACIONES DE LAS INTEGRALES MÚLTIPLES
En este capítulo se presentan algunas de las aplicaciones tanto físicas como
geométricas de las integrales múltiples, específicamente para las integrales dobles y
para las integrales triples.
3.1 APLICACIONES DE LAS INTEGRALES DOBLES
Entre las aplicaciones de las integrales dobles, se tienen las
aplicaciones geométricas y las físicas. En el primer grupo se
encuentran: el cálculo del área de una figura plana y el cálculo de
volúmenes de sólidos en el espacio; entre las aplicaciones físicas
están el cálculo de: masa, momentos estáticos de figuras planas,
centros de masa y momentos de inercia para una región
bidimensional.
3.1.1. ÁREA DE UNA FIGURA PLANA
En el capítulo 1 de este trabajo, se explicó el significado intrínseco
de la integral doble de una función f positiva en una región
bidimensional D,
∫∫ f ( x, y ) dA ,
D
como el volumen del sólido S
definido sobre la región D y bajo la gráfica de la función f . Ahora,
si se considera que f ( x, y ) = 1 , entonces la integral anterior queda
como:
∫∫ f ( x, y ) dA = ∫∫
D
D
dA
(III.1)
Recuerde que la integral
doble
f ( x, y ) dA ,
Por lo tanto, empleando la definición de la integral doble, se tiene
también puede escribirse
como
que:
∫∫
D
n
m
Lim ∑∑ f ( xi* , y j* )∆Aij
P →0
i =1 j =1
∫∫
D
n
m
dA = Lim ∑∑ ∆Aij
UC. Facultad de Ingeniería. Departamento de Matemática.
P →0
i =1 j =1
(III.2)
76
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
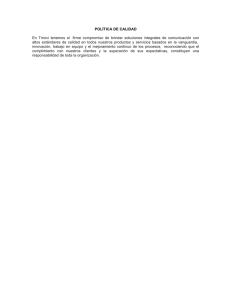
donde ∆Aij es el área del rectángulo genérico denotado Dij , el
cual puede observarse en la figura 3.1
y
xi
(xi*,yj*)
d = ym
yj
yj-1
Dij
D
yj
c = y0
a = x0
xi-1
xi
xn= b
x
Figura 3.1
Región D dividida en subrectángulos Dij
En otras palabras, la integral
∫∫
D
dA representa el volumen de un
sólido de sección transversal constante, cuya base es la región D
y cuya altura es igual a la unidad. Para un sólido con estas
características, el volumen se obtiene como el producto del área
de la base y la altura del mismo.
A partir de todo lo anterior, se define el cálculo del área de una
región plana.
ÁREA DE UNA FIGURA PLANA
Sea D una región bidimensional D , tal que D ⊆
2
. Sea A el
área de la región D , entonces:
A = ∫∫ dxdy
D
UC. Facultad de Ingeniería. Departamento de Matemática.
(III.3)
77
Geraldine Cisneros
Recuerde que una región
D es de tipo 1 si se
cumple:
Integrales Múltiples y Sus Aplicaciones
Observe que si la región D es de tipo 1, la ecuación anterior
queda como:
( x, y ) a ≤ x ≤ b ∧
D=
f ( x ) ≤ y ≤ g ( x )
A=∫
b
a
∫
g( x)
f ( x)
dydx = ∫
b
a
g ( x)
[ y ] f ( x ) dx
(III.3)
b
A = ∫ g ( x ) − f ( x ) dx
a
(III.4)
Donde la última integral, representa el área comprendida entre las
gráficas de y = f ( x ) y y = g ( x ) en el intervalo cerrado [ a,b ] . Esta
integral se estudia en la asignatura Análisis Matemático II, dentro
de las aplicaciones de la integral definida.
EJEMPLO 3.1
Dibuje la región D y calcule su área, empleando las integrales
dobles:
∫∫
D
dxdy y
∫∫
D
dydx , D =
{ ( x, y ) x ≥ y
2
− 2y ∧
x ≤ 4 − y2
}
Solución:
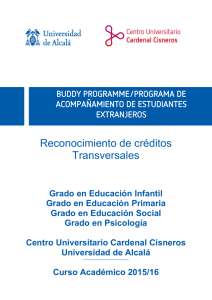
La región D se encuentra acotada por las gráficas de las
parábolas horizontales x = y 2 − 2 y y x = 4 − y 2 , tal como se puede
observar en la siguiente figura.
Recuerde que la gráfica
de la ecuación:
x = y2 − 2 y
D
x = ay 2 + by + c
Es una parábola
horizontal
x = 4 − y2
Figura 3.2
Región
UC. Facultad de Ingeniería. Departamento de Matemática.
D del ejemplo 3.2
78
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
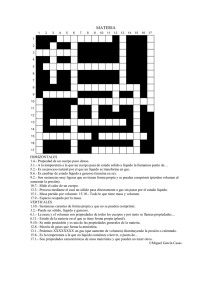
a) Para calcular el área de la región por medio de la integral doble
∫∫
D
dxdy , es necesario definir los límites de integración, que se
ilustran en la figura 3.3
D
Observe que la región D
es una región tipo 2, por
lo cual el área se obtiene
empleando una sola
integral doble
de la
.
forma
dxdy
∫∫
Valor de x a
la entrada de D
Valor de x a
la salida de D
x = 4 − y2
x = y2 − 2 y
D
Figura 3.3
Región
D del ejemplo 3.1 como una región tipo 2
Por tanto el área se obtiene como:
A=∫
2
−1
∫
4− y 2
y
2
2
dxdy = ∫ 4 − 2 y 2 + 2 y dy = 9
−2 y
−1
A = ∫∫ dxdy = 9
D
Para la primera curva:
x = y2 − 2 y
Se tiene que:
y = 1± 1+ x
Para la segunda curva:
x = 4 − y2
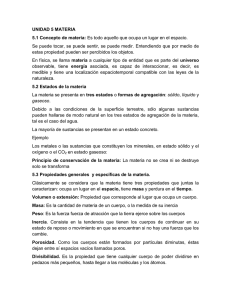
b) Cuando se desea calcular el área D con el orden de integración
inverso, esto es A = ∫∫ dydx , entonces, se necesita conocer las
D
ecuaciones de las curvas en función de la variable x y además
identificar los límites de integración, que a continuación se
muestran en la figura 3.4
entonces:
y = ± 4− x
UC. Facultad de Ingeniería. Departamento de Matemática.
79
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Valor de y a
la salida de D1
Valor de y a
la salida de D2
x=0
y = 1+ 1+ x
y = 4− x
x=3
En este caso, la región D
queda dividida en tres
regiones
tipo
1,
identificadas como: D1,
D2 y D3..
Valor de y a
la salida de D 3
y = 4− x
D1
D2
Valor de y a
la entrada de D1
D3
y = 1− 1+ x
Valor de y a
la entrada de D2
Valor de y a
la entrada de D3
y = − 4− x
y = 1− 1+ x
Figura 3.4
Región D del ejemplo 3.1 como tres regiones tipo 1
Entonces D = D1 ∪ D2 ∪ D3 , donde:
{( x, y ) − 1 ≤ x ≤ 0 ∧ 1 − 1 + x ≤ y ≤ 1 + 1 + x }
D = {( x, y ) 0 ≤ x ≤ 3 ∧ 1 − 1 + x ≤ y ≤ 4 − x }
D = {( x, y ) 3 ≤ x ≤ 4 ∧ − 4 − x ≤ y ≤ 4 − x }
D1 =
2
3
Así: A = ∫∫ dydx + ∫∫ dydx + ∫∫ dydx
D1
D2
A=∫
Al comparar los dos
cálculos de área de la
región D del ejemplo 3.1,
resulta
mucho
más
sencillo
emplear
la
que
integral
dxdy
∫∫
D
0
∫
1+ 1+ x
−1 1− 1+ x
D3
dydx + ∫
0
3
−1
0
A = ∫ 2 1 + xdx + ∫
(
A=
con el orden inverso.
3
0
∫
4− x
1− 1+ x
dydx + ∫
)
3
∫
4− x
− 4− x
4
dydx
4 − x − 1 + 1 + x dx + ∫ 2 4 − xdx
4 19 4
+ + =9
3 3 3
A = ∫∫ dydx = 9
D
UC. Facultad de Ingeniería. Departamento de Matemática.
4
3
80
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
EJEMPLO 3.2
Dada la región D , determine las ecuaciones de las curvas que la
limitan y calcule su área empleando las integrales dobles:
y
∫∫
D
∫∫
D
dxdy
dydx .
C2
C1
C3
D
Figura 3.5
Región
D del ejemplo 3.2
Solución:
Las ecuaciones de las curvas que limitan a la región D son:
Las ecuaciones de las
curvas en función de la
variable y son:
y − 20
C1 : x =
16
20 − y
C2 : x =
2
y
C1 : x = ±
2
C1 : y = 16 x + 20
C2 : y = −2 x + 20
y
C3 : y = 4 x 2
a) Para el cálculo del área de la región D por medio de la integral
doble
∫∫
D
dxdy , se necesita saber que valor toma la variable x a la
entrada y salida de la región. En la figura 3.6 se pueden observar
estos valores.
UC. Facultad de Ingeniería. Departamento de Matemática.
81
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Valor de x a
la entrada de D3
La región D no es una
región tipo 2, sin
embargo se puede dividir
en tres regiones: D1, D2
y D3., que sí lo son. Por
esta razón, para resolver
la
integral
doble
∫∫
D
dxdy
se
debe
emplear la propiedad
aditiva respecto a la
región de integración.
x=
Valor de x a
la salida de D3
y − 20
16
D3
x=
20 − y
2
y = 16
Valor de x a
la entrada de D2
y − 20
x=
16
y=4
Valor de x a
la entrada de D1
x=−
Valor de x a
la salida de D2
D2
x=
y
2
Valor de x a
la salida de D1
y
x=
2
D1
y
2
Figura 3.6
D del ejemplo 3.2 como tres regiones tipo 2
Región
Como D = D1 ∪ D2 ∪ D3 , entonces: A = ∫∫ dxdy + ∫∫ dxdy + ∫∫ dxdy
D1
D2
donde:
D1 = ( x, y )
D2 = ( x, y )
D3 = ( x, y )
A=∫
A=∫
4
0
4
0
∫
y
2
y
−
2
−
y
y
≤x≤
2
2
y
y − 20
≤x≤
16
2
y − 20
20 − y
≤x≤
16
2
dxdy + ∫
16
4
∫
y
2
y − 20
16
∧ 0 ≤ y ≤ 4
∧ 4 ≤ y ≤ 16
∧ 16 ≤ y ≤ 20
dxdy + ∫
20
16
∫
20 − y
2
y − 20
16
dxdy
16
20 45
y y − 20
9y
−
ydy + ∫
dy + ∫ − dy
4 2
16
16
4 16
A=
UC. Facultad de Ingeniería. Departamento de Matemática.
16 157 9
+
+ = 36
3
6
2
D3
82
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
A = ∫∫ dxdy = 36
D
b) En la figura 3.7 se muestran los límites de integración para la
integral interna de A = ∫∫ dydx .
D
Valor de y a
la salida de D2
y = −2 x + 20
Valor de y a
la salida de D1
y = 16 x + 20
La región D puede
dividirse en dos regiones
tipo 1, identificadas
como: D1 y D2 ; es decir:
D = D1 ∪ D2
D2
Valor de y a
la entrada de D2
D1
y = 4x2
Valor de y a
la entrada de D1
y = 4x2
x=0
Figura 3.7
Región D del ejemplo 3.2 como dos regiones tipo 1
Luego: A = ∫∫ dydx + ∫∫ dydx , donde:
D1
D2
{( x, y )
= {( x, y )
}
≤ y ≤ −2 x + 20}
D1 =
− 1 ≤ x ≤ 0 ∧ 4 x 2 ≤ y ≤ 16 x + 20
D2
0 ≤ x ≤ 2 ∧ 4 x2
A=∫
0
−1
∫
16 x + 20
4x
2
dydx + ∫
A = ∫ (16 x + 20 − 4 x 2 ) dx + ∫
0
2
−1
0
2
0
∫
− 2 x + 20
4 x2
( −2 x + 20 − 4 x ) dx = 323 + 763 = 36
A = ∫∫ dydx = 36
D
UC. Facultad de Ingeniería. Departamento de Matemática.
dydx
2
83
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
EJEMPLO 3.3
Calcule, empleando integrales dobles, el área comprendida entre
dos círculos concéntricos de radios 2 y 4.
Solución:
Considere una corona circular con centro en el origen del sistema
de coordenadas tal como se observa a continuación.
La región D planteada en
el ejemplo 3.3 recibe el
nombre
de
corona
circular, y su área es:
A = π R2 − r 2
(
x2 + y2 = 4
)
donde
R: Radio externo
r: radio interno
D
x 2 + y 2 = 16
Figura 3.8
Región
D del ejemplo 3.3
Como A = ∫∫ dydx y la región D es simétrica respecto al origen,
D
entonces para simplificar el cálculo de área, sólo se evaluará
A1 = ∫∫ dydx , donde A1 es el área de la región D que se encuentra
D1
en el primer cuadrante, denotada como D1 , de manera que:
A = 4 A1
La región denotada como D1, se muestra en la figura 3.9.
UC. Facultad de Ingeniería. Departamento de Matemática.
84
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Valor de y a
la salida de D1.A
y = 16 − x 2
x=2
Valor de y a
la salida de D1.B
D1.A
Para calcular el área de la
región D1, se puede
dividirla en dos regiones
tipo 1:
y = 16 − x 2
D1 = D1.A ∪ D1.B
D1.B
Valor de y a
la entrada de D1.A
y = 4 − x2
Valor de y a
la entrada de D1.B
y=0
Figura 3.9
Región D1 del ejemplo 3.3
Luego: A1 = ∫∫
D1. A
dydx + ∫∫
D1. B
dydx , donde:
{( x, y ) 0 ≤ x ≤ 2 ∧
D = {( x, y ) 2 ≤ x ≤ 4
D1.A =
1.B
A1 = ∫
A1 = ∫
2
0
(
2
0
∫
16 − x 2
4− x2
4 − x 2 ≤ y ≤ 16 − x 2
∧ 0 ≤ y ≤ 16 − x 2
dydx + ∫
4
2
∫
16 − x 2
0
)
16 − x 2 − 4 − x 2 dx + ∫
4
2
π
8π
A1 = 2 3 + + −2 3 +
3
3
A = ∫∫ dydx = 12π
D
UC. Facultad de Ingeniería. Departamento de Matemática.
}
dydx
16 − x 2 dx
= 3π
}
85
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
3.1.2. VOLUMEN DE UN SÓLIDO EN EL ESPACIO
En el capítulo 1 de este trabajo, se determinó que la integral
∫∫ f ( x, y ) dA
D
representa el volumen del sólido S definido sobre la
región D y bajo la gráfica de la función f ; sin embargo, la integral
doble también puede emplearse para determinar el volumen de un
sólido más general.
VOLUMEN DE UN SÓLIDO EN EL ESPACIO
Sean f :
2
→
y g:
2
→
dos funciones reales, continuas
en una región bidimensional D , tales que f ( x, y ) ≤ g ( x, y )
∀ ( x, y ) ∈ D .
Sea
V
el
volumen
del
sólido
acotado
superiormente por la gráfica de la función g y acotado
inferiormente por la gráfica de la función f, entonces:
V = ∫∫ g ( x, y ) − f ( x, y ) dA
D
EJEMPLO 3.4
(III.5)
Dibuje el sólido S acotado por las superficies: z = 2 x 2 + y 2 y
z = 20 − x 2 − y 2
y plantear su volumen empleando integrales
dobles.
Solución:
En la figura 3.10 se muestra el sólido S de este ejemplo, donde la
superficie superior es z = 20 − x 2 − y 2 y la superficie inferior viene
dada por la ecuación z = 2 x 2 + y 2 .
UC. Facultad de Ingeniería. Departamento de Matemática.
86
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Valor de z a
la salida de S
z = 20 − x 2 − y 2
La superficie definida por
la ecuación:
z = 20 − x2 − y 2
Es una semiesfera (parte
superior).
S
La superficie definida por
la ecuación:
Valor de z a
la entrada de S
z = 2 x2 + y 2
z = 2 x2 + y2
Es un cono .
Figura 3.10
Sólido S del ejemplo 3.4
El volumen del sólido S, mostrado en la figura anterior, se obtiene
mediante la integral doble:
V = ∫∫ 20 − x 2 − y 2 − 2 x 2 + y 2 dA
D
donde D es la proyección del sólido S en el plano xy. Esta
proyección, para este ejemplo, resulta ser un círculo con centro en
el origen, al que se obtiene en la intersección de las dos
superficies:
z = 2 x 2 + y 2
z = 20 − x 2 − y 2
⇒ 2 x 2 + y 2 = 20 − x 2 − y 2
4 ( x 2 + y 2 ) = 20 − x 2 − y 2
⇒ x2 + y 2 = 4
Entonces:
D=
{( x, y )
UC. Facultad de Ingeniería. Departamento de Matemática.
}
x2 + y 2 ≤ 4
87
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Valor de y a
la salida de D
y = 4 − x2
Donde D es una región
tipo 1 y también tipo 2,
pero en este ejemplo se
trabaja como una región
tipo 1.
D
Valor de y a
la entrada de D
y = − 4 − x2
Figura 3.11
Región
Es decir, D =
En el siguiente capítulo,
se
mostrará
como
resolver una integral de
este tipo, empleando un
cambio
de
variable
apropiado.
{( x, y )
D del ejemplo 3.4
− 2 ≤ x ≤ 2 − 4 − x2 ≤ y ≤ 4 − x2
}
Volviendo a la integral de volumen, se tiene que:
V =∫
2
−2
∫
4− x2
− 4− x2
20 − x 2 − y 2 − 2 x 2 + y 2 dydx
Ahora, para resolver esta integral se requiere un procedimiento
muy riguroso y largo, por lo cual a continuación sólo se presenta el
resultado de esta integral, el cual fue obtenido con software
matemático:
V = ∫∫ 20 − x 2 − y 2 − 2 x 2 + y 2 dA = 19, 77678464
D
UC. Facultad de Ingeniería. Departamento de Matemática.
88
Geraldine Cisneros
EJEMPLO 3.5
Integrales Múltiples y Sus Aplicaciones
Dibuje el sólido S acotado por las superficies: z = 4 + xy y z = 1 y
dentro del cilindro x 2 + y 2 ≤ 1 , calcule su volumen empleando
integrales dobles.
Solución:
En la figura siguiente se aprecia el sólido S, acotado por las
superficies z = 4 + xy y z = 1 y dentro del cilindro x 2 + y 2 ≤ 1 .
Valor de z a
la salida de S
z = 4 + xy
x2 + y 2 = 1
S
Valor de z a
la entrada de S
z =1
Figura 3.12
Sólido S del ejemplo 3.5
El volumen del sólido S, se obtiene mediante la integral doble:
V = ∫∫ [ 4 + xy − 1] dA = ∫∫ [3 + xy ] dA
D
D
donde D es la proyección del sólido S en el plano xy. Esta
proyección, se observa en la figura 3.13
UC. Facultad de Ingeniería. Departamento de Matemática.
89
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
D
En este ejemplo, la
región D es de tipo 1 y
también tipo 2, pero se
trabaja como una región
tipo 2.
Valor de x a
la entrada de D
Valor de x a
la salida de D
x = − 1− y2
x = 1− y2
Figura 3.13
Región D del ejemplo 3.5
En este caso, la región D se define como:
D=
{( x, y )
− 1− y2 ≤ x ≤ 1− y2
}
−1 ≤ y ≤ 1
Por lo tanto la integral de volumen queda como:
V =∫
1
∫
1− y 2
−1 − 1− y
2
[3 + xy ] dxdy = ∫ −1 6
1
1 − y 2 dy = 3π
V = ∫∫ [3 + xy ] dA = 3π
D
EJEMPLO 3.6
Dibuje el sólido S acotado por z = 1 + x3 y + xy 3 , z = 0 , y = x3 − x y
y = x 2 + x y calcule su volumen empleando integrales dobles.
Solución:
En la figura 3.14 se observa el sólido S, acotado superiormente por
z = 1 + x 3 y + xy 3
e inferiormente por
z = 0 ; mientras que las
superficies y = x3 − x y y = x 2 + x definen las paredes de dicho
cuerpo tridimensional.
UC. Facultad de Ingeniería. Departamento de Matemática.
90
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Valor de z a
la salida de S
z = 1 + x3 y + xy 3
S
Valor de z a
la entrada de S
z=0
Figura 3.14
Sólido S del ejemplo 3.6
Donde, el volumen del sólido S, se obtiene como:
V = ∫∫ 1 + x3 y + xy 3 − 0 dA = ∫∫ 1 + x3 y + xy 3 dA
D
D
Al proyectar el sólido anterior en el plano xy, se obtiene la región
bidimensional D, la cual se aprecia en la figura 3.15
Valor de y a
la salida de D
y = x3 − x
En la figura 3.15, se
observa que la región D
del ejemplo 3.6 es una
región de tipo 1.
D
Valor de y a
la entrada de D
y = x2 + x
Figura 3.15
Región
UC. Facultad de Ingeniería. Departamento de Matemática.
D del ejemplo 3.6
91
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Por lo tanto, la región D se define como:
D=
{( x, y )
}
− 1 ≤ x ≤ 0 x 2 + x ≤ y ≤ x3 − x
La integral de volumen queda como:
V =∫
0
−1
∫
x3 − x
x2 + x
1 + x3 y + xy 3 dydx
13
0 x
7 x9
517
− x11 +
− x8 − 4 x 7 − 2 x 6 + x3 − x 2 − 2 x dx =
V =∫
−1
4
1260
4
517
V = ∫∫ 1 + x3 y + xy 3 dA =
D
1260
3.1.3. MASA DE UNA FIGURA PLANA
A continuación, se explica como determinar la masa de una figura
plana no homogénea, de área D , como la región mostrada en la
figura 3.16; es decir para regiones donde la densidad varía en
En la figura 3.16 la
región
D
es
no
homogénea, por lo cual
su sombreado no es
uniforme.
cada punto ( x, y ) ∈ D .
Adicionalmente:
ρ ( x, y ) = 0 ∀ ( x, y ) ∉ D
La
densidad
tiene
unidades de masa por
área unitaria.
Para esta aplicación,
considere que la función
densidad ρ es continua
en la región D .
Figura 3.16
Región D no homogénea
UC. Facultad de Ingeniería. Departamento de Matemática.
92
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Si se escoge un punto arbitrario ( xi* , y j* ) ∈ Dij , entonces la masa
de este subrectángulo, denotada como mij , se obtiene como:
mij = ρ ( xi* , y j * ) ∆Aij
(III.6)
Por lo tanto la masa de la placa plana de área A , se puede
estimar mediante la doble suma de Riemann:
n
m
m ≈ ∑∑ ρ ( xi* , y j * ) ∆Aij
(III.7)
i =1 j =1
Si se aumenta el número de subintervalos, de manera que la
norma de la partición P tienda a cero, se tiene:
n
m
m = Lim ∑∑ ρ ( xi* , y j * )∆Aij
P →0
n
m
m = Lim ∑∑ ρ ( xi* , y j * )∆Aij = ∫∫ ρ ( x, y ) dA
P →0
(III.8)
i =1 j =1
D
i =1 j =1
(III.9)
Entonces, el cálculo de la masa de una figura plana se obtiene
mediante:
El cálculo de masa de
una región D , también
puede emplearse para
calcular
la
carga
eléctrica, Q, distribuida
sobre una región D .
Q = ∫∫ σ ( x, y ) dA
D
MASA DE UNA FIGURA PLANA
Considere una lámina plana de densidad variable ρ ( x, y ) ,
que ocupa una región D en el plano xy, entonces su masa,
denotada m , se obtiene como:
Donde σ es la función
densidad de carga.
UC. Facultad de Ingeniería. Departamento de Matemática.
m = ∫∫ ρ ( x, y ) dA
D
(III.10)
93
Geraldine Cisneros
EJEMPLO 3.7
Integrales Múltiples y Sus Aplicaciones
Determine la masa de la placa plana limitada por las curvas
x = y 2 − 1 y x = 2 y 2 − 2 , cuya densidad es igual a la unidad.
Solución:
Recuerde que la densidad se calcula como m = ∫∫ ρ ( x, y ) dA , por
D
lo tanto para esta placa se tiene:
m = ∫∫ dA
D
Ahora, se debe identificar la región D para definir los límites de
integración.
D
Valor de x a
la entrada de D
Valor de x a
la salida de D
x = 2 y2 − 2
x = y2 −1
Figura 3.17
D del ejemplo 3.7
Región
Entonces la región D está definida como:
D=
{( x, y )
}
2 y2 − 2 ≤ x ≤ y2 −1 ∧ −1 ≤ y ≤ 1
Por lo tanto:
m=∫
1
∫
y 2 −1
2
−1 2 y − 2
dxdy = ∫ (1 − y 2 ) dy =
m=∫
UC. Facultad de Ingeniería. Departamento de Matemática.
1
−1
1
∫
y 2 −1
−1 2 y 2 − 2
dxdy =
4
3
4
3
94
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
EJEMPLO 3.8
Determine la masa de la placa plana limitada por las curvas
y=
3 2
x − 6 x + 4 y y = 2 x − 2 , cuya densidad varía de acuerdo a la
2
función ρ ( x, y ) = 1 + 2 x .
Solución:
Según la definición del
valor absoluto
x − 2 si x − 2 ≥ 0
x−2 =
2 − x si x − 2 < 0
El cálculo de la masa se obtiene de la integral doble
m = ∫∫ ρ ( x, y ) dA , por lo tanto:
D
m = ∫∫ (1 + 2 x ) dA
D
entonces
2 x − 4 si
y=
4 − 2 x si
x≥2
A continuación se muestra la región D.
x<2
y = 2x − 4
y = −2 x + 4
La región D debe
dividirse en dos regiones
tipo 1, tal que:
D = D1 ∪ D2
D
y=
3 2
x − 6x + 4
2
Figura 3.18
Región
D del ejemplo 3.8
Entonces:
m = ∫∫ (1 + 2 x ) dA = ∫∫ (1 + 2 x ) dA + ∫∫
D
D1
D2
(1 + 2 x ) dA
Donde
3 2
D1 = ( x, y ) 0 ≤ x ≤ 2 ∧
x − 6 x + 4 ≤ y ≤ −2 x + 4
2
3 2
D2 = ( x, y ) 2 ≤ x ≤ 4 ∧
x − 6 x + 4 ≤ y ≤ 2 x − 4
2
UC. Facultad de Ingeniería. Departamento de Matemática.
95
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
En la figura 3.19 se muestra el orden de integración para obtener
la masa de la placa con la forma de la región D.
Valor de y a
la salida de D 2
y = 2x − 4
Valor de y a
la salida de D1
y = 4 − 2x
x=2
D2
D1
Valor de y a
la entrada de D2
3
y = x2 − 6 x + 4
2
Valor de y a
la entrada de D1
y=
3 2
x − 6x + 4
2
Figura 3.19
Región D del ejemplo 3.8 como dos regiones tipo 1
Entonces:
m=∫
2
0
∫
4− 2 x
3 2
x −6 x + 4
2
4
2 x−4
(1 + 2 x ) dydx + ∫ 2 ∫ 3 x −6 x+ 4 (1 + 2 x ) dydx
2
2
2
4
13
29 2
m = ∫ −3x 3 + x 2 + 4 x dx + ∫ −8 − 3x3 +
x − 8 x dx
0
2
2
2
m=
40 80
+
= 40
3
3
m = ∫∫ (1 + 2 x ) dA = 40
D
UC. Facultad de Ingeniería. Departamento de Matemática.
96
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
3.1.4. MOMENTOS ESTÁTICOS DE FIGURAS PLANAS
El momento estático de una partícula alrededor de un eje se
define como el producto de su masa y la distancia que la separa
de ese eje. A continuación, se trata específicamente, los
momentos estáticos de una figura plana D alrededor de los ejes
coordenados.
Considere
una
lámina
o
placa
plana
D,
dividida
en
subrectángulos Dij , tal como se muestra en la siguiente figura:
Los momentos estáticos
son
momentos
de
“equilibrio”.
M x es una medida de la
tendencia a girar en torno
al eje x, análogamente,
M y es una medida de la
tendencia
a
girar
alrededor del eje y.
Figura 3.20
Región general
D no homogénea
Entonces, el momento estático alrededor del eje x, para cada
subrectángulo Dij , denotado como M xij , viene dado por:
M x ij = y j * ρ ( xi* , y j * ) ∆Aij
(III.11)
Sumando el momento estático alrededor del eje x para cada
subrectángulo, se tiene que:
n
m
M x ≈ ∑∑ y j * ρ ( xi* , y j * ) ∆Aij
i =1 j =1
UC. Facultad de Ingeniería. Departamento de Matemática.
(III.13)
97
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Tomando el límite cuando el número de subrectángulos aumenta
en la expresión anterior:
n
m
M x = Lim ∑∑ y j * ρ ( xi* , y j * ) ∆Aij
P →0
n
m
M x = Lim ∑∑ y j* ρ ( xi* , y j * ) ∆Aij = ∫∫ y ρ ( x, y ) dA
P →0
(III.14)
i =1 j =1
D
i =1 j =1
(III.15)
Análogamente, el momento estático alrededor del eje y, que se
denota M y , se obtiene como:
n
m
M y = Lim ∑∑ xi* ρ ( xi* , y j * ) ∆Aij = ∫∫ x ρ ( x, y ) dA
P →0
D
i =1 j =1
(III.16)
MOMENTOS ESTÁTICOS DE FIGURAS PLANAS
Sea D una región del plano xy, tal que su densidad viene
dada por la función
ρ:
2
→
, la cual es continua
∀ ( x, y ) ∈ D , entonces el momento estático alrededor del eje x,
denotado M x , se obtiene como:
M x = ∫∫ y ρ ( x, y ) dA
D
(III.17)
Mientras que el momento estático alrededor del eje y,
denotado M y , se calcula como:
M y = ∫∫ x ρ ( x, y ) dA
D
UC. Facultad de Ingeniería. Departamento de Matemática.
(III.18)
98
Geraldine Cisneros
EJEMPLO 3.9
Integrales Múltiples y Sus Aplicaciones
Determine los momentos estáticos de la placa plana descrita en el
ejemplo 3.7.
La región del ejemplo 3.7
se muestra a continuación
Solución:
Los momentos estáticos se calculan de la siguiente manera:
M x = ∫∫ y ρ ( x, y ) dA y M y = ∫∫ x ρ ( x, y ) dA .
D
D
Entonces:
Mx = ∫
Y se encuentra acotada
por las curvas x = y 2 − 1
y x = 2 y2 − 2 .
La densidad es :
ρ ( x, y ) = 1
2
2
( x, y ) 2 y − 2 ≤ x ≤ y − 1 ∧
D=
−1 ≤ y ≤ 1
My = ∫
1
∫
1
∫
y 2 −1
2
−1 2 y − 2
ydxdy = ∫ y (1 − y 2 ) dy = 0
1
−1
1
3 3
8
xdxdy = ∫ − − y 4 + 3 y 2 dy = −
−2
−1
5
2 2
y 2 −1
−1 2 y
2
Por lo tanto, los momentos estáticos para una lámina con la forma
de la región D del ejemplo 3.7 son:
M x = ∫∫ ydA = 0
D
M y = ∫∫ xdA = −
D
EJEMPLO 3.10
8
5
Determine los momentos estáticos de la placa plana descrita en el
ejemplo 3.8.
La región del ejemplo 3.8
se muestra a continuación
Solución:
Los momentos estáticos se calculan como: M x = ∫∫ y ρ ( x, y ) dA y
D
M y = ∫∫ x ρ ( x, y ) dA .
D
La densidad:
ρ ( x, y ) = 1 + 2 x
Donde D = D1 ∪ D2
( x, y ) 0 ≤ x ≤ 2 ∧
D1 =
3 2
x − 6 x + 4 ≤ y ≤ −2 x + 4
2
( x, y ) 2 ≤ x ≤ 4 ∧
D2 =
3 2
x − 6 x + 4 ≤ y ≤ 2 x − 4
2
Mx = ∫
2
0
∫
4−2 x
3 2
x −6 x + 4
2
y (1 + 2 x ) dydx + ∫
4
2
∫
2 x−4
3 2
x −6 x+ 4
2
y (1 + 2 x ) dydx
2
9
135 4
M x = ∫ − x5 +
x − 35 x 3 + 10 x 2 + 16 x dx +
0
8
4
4
9
135 4
+ ∫ − x5 +
x − 35 x3 + 10 x 2 + 16 x dx
2
8
4
UC. Facultad de Ingeniería. Departamento de Matemática.
99
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
8 56 64
Mx = +
=
3 3
3
Calculando el momento estático respecto al eje y se tiene:
My = ∫
2
0
∫
4− 2 x
3 2
x −6 x + 4
2
x (1 + 2 x ) dydx + ∫
My =
4
2
∫
2 x−4
3 2
x −6 x + 4
2
x (1 + 2 x ) dydx
262 1162 1424
+
=
15
15
15
Finalmente, para la región del ejemplo 3.8 se tiene que:
64
3
1424
M y = ∫∫ x (1 + 2 x ) dA =
D
15
M x = ∫∫ y (1 + 2 x ) dA =
D
3.1.5. CENTRO DE MASA
El centro de gravedad de una figura plana D, es un punto P de
El centro de gravedad
también
es
llamado
centro de masa.
El significado físico del
centro de gravedad, es
que
la
lámina
se
comporta como si su
masa
estuviera
concentrada en ese punto.
coordenadas
(x,y)∈ D ,
en el cual la región se equilibra
horizontalmente. Las coordenadas de este punto se obtienen de
las ecuaciones:
x=
y=
El centro de gravedad
recibe el nombre de
centroide cuando la
densidad es constante.
My
m
Mx
m
(III.19)
(III.20)
Donde tanto la masa de la placa plana como los momentos
estáticos se calculan por medio de integrales dobles.
UC. Facultad de Ingeniería. Departamento de Matemática.
100
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
CENTRO DE MASA
Sea D una región del plano xy, tal que su densidad viene
dada por la función
ρ:
2
→
, la cual es continua
∀ ( x, y ) ∈ D , entonces el centro de gravedad viene dado por:
x=
1
x ρ ( x, y ) dA
m ∫∫D
(III.21)
y=
1
y ρ ( x, y ) dA
m ∫∫D
(III.22)
Donde m es la masa de la placa D , que se obtiene como
∫∫ ρ ( x, y ) dA .
D
EJEMPLO 3.11
Determine el centro de masa de la placa plana descrita en el
ejemplo 3.7.
La región del ejemplo 3.7
está acotada por las
curvas
x = y2 −1 y
x = 2 y2 − 2 .
Su densidad es :
ρ ( x, y ) = 1
El centro de masa es un punto P ( x , y ) ∈ D , tal que sus
coordenadas se obtienen empleando las ecuaciones III.21 y
Y
adicionalmente
obtuvo:
se
4
m = ∫ ∫ 2 dxdy =
−1 2 y − 2
3
1
Solución:
y 2 −1
III.22. Como ya se calculó la masa y los momentos estáticos para
esta región, entonces sólo queda sustituir en las ecuaciones III.19
y III.20
M x = ∫∫ ydA = 0
D
M y = ∫∫ xdA = −
D
8
5
8
6
x=
=−5 =−
4
5
m
3
My
y=
UC. Facultad de Ingeniería. Departamento de Matemática.
Mx 0
= =0
4
m
3
101
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Entonces:
6
P ( x, y ) = − ,0
5
En la siguiente figura se observa el centro de masa o de gravedad
de la placa D descrita en el ejemplo 3.7
6
− ,0
5
D
Figura 3.21
Centro de masa de la región
EJEMPLO 3.12
D del ejemplo 3.7
Determine el centro de masa de la placa plana descrita en el
ejemplo 3.8.
La región D del ejemplo
3.8, tiene una densidad
que varía según:
ρ ( x, y ) = 1 + 2 x
En los ejemplos 3.8 y
3.10, se obtuvo:
m = ∫∫ (1 + 2 x ) dA = 40
D
64
D
3
1424
M y = ∫∫ x (1 + 2 x ) dA =
D
15
M x = ∫∫ y (1 + 2 x ) dA =
Solución:
Sustituyendo el valor de la masa y los momentos estáticos en las
ecuaciones que permiten calcular las coordenadas del centro de
masa, se tiene:
1424
178
x=
= 15 =
40
75
m
My
UC. Facultad de Ingeniería. Departamento de Matemática.
102
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
64
Mx
8
y=
= 3 =
40 15
m
Luego:
178 8
P ( x, y ) =
,
75 15
En la figura 3.22 se aprecia la región D y su centro de masa:
178 8
,
75 15
D
Figura 3.22
Centro de masa de la región
D del ejemplo 3.8
3.1.6. MOMENTO DE INERCIA
Los momentos de inercia
también son llamados
segundos momentos.
El momento de inercia de una partícula alrededor de un eje se
Los momentos de inercia
son momentos de “giro”.
que la separa de ese eje y se considera como una medida de la
define como el producto de su masa y el cuadrado de la distancia
oposición a girar del cuerpo cuando actúa sobre él una fuerza de
rotación. Los segundos momentos más importantes son los
momentos de inercia alrededor de los ejes coordenados y del
origen.
UC. Facultad de Ingeniería. Departamento de Matemática.
103
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
El procedimiento para obtener estos momentos como integrales
dobles es similar al que se ilustró para los momentos estáticos,
por lo tanto, el momento de inercia de una placa D, respecto al eje
x, denotado I x , se calcula como:
En las ecuaciones III.23
y III.24, el cuadrado de x
o de y recibe el nombre
de brazo de palanca.
n
m
I x = Lim ∑∑ ( y j * ) ρ ( xi* , y j * ) ∆Aij = ∫∫ y 2 ρ ( x, y ) dA (III.23)
P →0
2
D
i =1 j =1
Análogamente, el momento de inercia alrededor del eje y se
denota como I y y se obtiene como:
n
m
I y = Lim ∑∑ ( xi* ) ρ ( xi* , y j * ) ∆Aij = ∫∫ x 2 ρ ( x, y ) dA
P →0
El momento de inercia
alrededor del origen
también es conocido
como momento polar de
inercia.
I0 = I x + I y
2
D
i =1 j =1
(III.24)
La suma de estos dos momentos se conoce como momento de
inercia alrededor del origen, I 0 , donde:
n
m
2
2
I 0 = Lim ∑∑ ( xi* ) + ( y j * ) ρ ( xi* , y j * ) ∆Aij = ∫∫ ( x 2 + y 2 ) ρ ( x, y ) dA
D
P →0
i =1 j =1
(III.25)
MOMENTOS DE INERCIA DE FIGURAS PLANAS
Sea D una región del plano xy, tal que su densidad viene
dada por la función
ρ:
2
→
, la cual es continua
∀ ( x, y ) ∈ D , entonces los momentos de inercia alrededor de
los ejes x y y, denotados I x e I y , se obtienen como:
I x = ∫∫ y 2 ρ ( x, y ) dA
(III.26)
I y = ∫∫ x 2 ρ ( x, y ) dA
(III.27)
D
D
El momento polar de inercia, I 0 , es:
I 0 = ∫∫ ( x 2 + y 2 ) ρ ( x, y ) dA
D
UC. Facultad de Ingeniería. Departamento de Matemática.
(III.28)
104
Geraldine Cisneros
EJEMPLO 3.13
Integrales Múltiples y Sus Aplicaciones
Determine los momentos de inercia de la placa plana descrita en
el ejemplo 3.7.
La gráfica de la región D
del ejemplo 3.7 se
muestra a continuación:
Solución:
Los momentos de inercia alrededor de los ejes coordenados se
calculan
de
la
siguiente
manera:
I x = ∫∫ y 2 ρ ( x, y ) dA ,
D
I y = ∫∫ x 2 ρ ( x, y ) dA y I 0 = ∫∫ ( x 2 + y 2 ) ρ ( x, y ) dA .
D
D
Ix = ∫
Cuya densidad es :
ρ ( x, y ) = 1
2
2
( x, y ) 2 y − 2 ≤ x ≤ y − 1 ∧
D=
−1 ≤ y ≤ 1
Iy = ∫
I0 = ∫
1
∫
1
∫
y 2 −1
−1 2 y 2 − 2
y 2 dxdy = ∫ y 2 (1 − y 2 ) dy =
1
−1
4
15
1 7
7 6
32
2
4
2
x
dxdy
=
∫ −1 3 − 3 y + 7 y − 2 y dy = 15
−1 ∫ 2 y 2 − 2
y 2 −1
1
y 2 −1
2
−1 2 y − 2
(x
2
1 7
7
12
+ y 2 ) dxdy = ∫ − y 6 + 6 y 4 − 6 y 2 dy =
−1 3
3
5
Nótese que el momento polar de inercia puede calcularse como se
acaba de ilustrar, sin embargo, también puede obtenerse a partir
de:
I0 = I x + I y =
4 32 36 12
+
=
=
15 15 15 5
Entonces los momentos de inercia para la placa plana descrita en
el ejemplo3.7 son:
4
15
32
I y = ∫∫ x 2 dA =
D
15
I x = ∫∫ y 2 dA =
D
I 0 = ∫∫ ( x 2 + y 2 ) dA =
D
UC. Facultad de Ingeniería. Departamento de Matemática.
12
5
105
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
EJEMPLO 3.14
Determine los momentos de inercia de la placa plana descrita en
el ejemplo 3.8.
Solución:
La gráfica de la región D
del ejemplo 3.8 se
observa a continuación:
Calculando el momento de inercia respecto al eje x, se tiene:
Ix = ∫
2
0
∫
4− 2 x
3 2
x −6 x + 4
2
Ix = ∫
(1 + 2 x )
2
3
0
+∫
Cuya densidad vienen
dada por:
ρ ( x, y ) = 1 + 2 x
4
3
2
4
2
∫
2 x−4
3 2
x −6 x + 4
2
y 2 (1 + 2 x ) dydx
3
3 2
( 4 − 2 x ) − x − 6 x + 4 dx +
2
3
(1 + 2 x )
( 2 x − 4 )
3
3
− x2 − 6x + 4
2
3
dx
712 2168 576
+
=
35
35
7
Ix =
Donde D = D1 ∪ D2
( x, y ) 0 ≤ x ≤ 2 ∧
D1 =
3 2
x − 6 x + 4 ≤ y ≤ −2 x + 4
2
( x, y ) 2 ≤ x ≤ 4 ∧
D2 =
3 2
x − 6 x + 4 ≤ y ≤ 2 x − 4
2
y 2 (1 + 2 x ) dydx + ∫
Calculando el momento inercia respecto al eje y se tiene:
Iy = ∫
2
0
∫
4−2 x
3 2
x −6 x + 4
2
x 2 (1 + 2 x ) dydx + ∫
4
2
∫
2 x−4
3 2
x −6 x+ 4
2
x 2 (1 + 2 x ) dydx
2
4
13
29 4
I y = ∫ −3x5 + x 4 + 4 x3 dx + ∫ −3 x5 +
x − 8 x3 − 8 x 2 dx
0
2
2
2
Iy =
128 3472 3856
+
=
5
15
15
El momento polar de inercia puede obtenerse como:
I0 = ∫
2
0
∫
4−2 x
3 2
x −6 x + 4
2
(x
2
+ y 2 ) (1 + 2 x ) dydx + ∫
O también como: I 0 = I x + I y =
4
2
∫
2 x−4
3 2
x −6 x+ 4
2
(x
2
+ y 2 ) (1 + 2 x ) dydx
576 3856 35632
+
=
7
15
105
576
D
7
3856
I y = ∫∫ x 2 (1 + 2 x ) dA =
D
15
35632
I 0 = ∫∫ ( x 2 + y 2 ) (1 + 2 x ) dA =
D
105
I x = ∫∫ y 2 (1 + 2 x ) dA =
UC. Facultad de Ingeniería. Departamento de Matemática.
106
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
3.2 APLICACIONES DE LAS INTEGRALES TRIPLES
Las aplicaciones de las integrales triples, son similares a las
aplicaciones de las dobles. Sus definiciones se obtienen a partir
de la triple suma de Riemann; sin embargo a continuación se
presentan de una vez con la integral triple correspondiente para
cada una de ellas. Las aplicaciones que se mencionan a
continuación son: volúmenes de sólidos en el espacio, masa,
momentos estáticos, centros de masa y momentos de inercia de
cuerpos en el espacio.
3.2.1.VOLUMEN DE UN SÓLIDO EN EL ESPACIO
En el capítulo 2 se definió la integral triple de una función f sobre
una región tridimensional B ,
∫∫∫ f ( x, y,z ) dV ,
B
n
m
como el límite de
l
una triple suma de Riemann , L im ∑∑∑ f ( xi* , y j* ,zk* )∆Vijk . Si la
P →0
i =1 j =1 k =1
función f es igual a la unidad; es decir, f ( x, y,z ) = 1 , entonces, la
integral triple representa el volumen V del sólido B , resultando la
siguiente integral:
V = ∫∫∫ dV
B
(III.29)
VOLUMEN DE UN SÓLIDO EN EL ESPACIO
Sea B una región tridimensional, entonces su volumen,
denotado como V , se obtiene como
V = ∫∫∫ dV
B
UC. Facultad de Ingeniería. Departamento de Matemática.
(III.30)
107
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
EJEMPLO 3.15
Determine el volumen del sólido B acotado por las superficies:
x = 0 , y = x , y = 2 − x , z = 1 y z = 5 − x2 − y 2 .
Solución:
Para calcular el volumen del sólido B, se emplea la integral triple
∫∫∫
B
dV . En la siguiente gráfica se ilustra el sólido B acotado por
las superficies mencionadas en el ejemplo 3.15 y adicionalmente
se señalan los valores que toma la variable z a la entrada y la
salida del recinto B.
Valor de z a
la salida de B
z = 5 − x2 − y 2
y=x
B
y = 2− x
Valor de z a
la entrada de B
z =1
Figura 3.23
Sólido
B del ejemplo 3.15
Por lo tanto el volumen se obtiene como:
V = ∫∫
∫
5− x 2 − y 2
D 1
dzdA
Donde D es la proyección del sólido B sobre el plano xy. Dicha
proyección se muestra en la figura 3.24.
UC. Facultad de Ingeniería. Departamento de Matemática.
108
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Valor de y a
la salida de D
y = 2− x
La región D del ejemplo
3.15 es una región tipo 1
D
Valor de y a
la entrada de D
y=x
Figura 3.24
Proyección del sólido B del ejemplo 3.15 en el plano xy
Entonces la región D, está definida como:
D=
{( x, y )
}
0 ≤ x ≤1 ∧
x ≤ y ≤ 2− x
Luego:
V =∫
1
0
2− x
∫ ∫
x
5− x 2 − y 2
1
dzdydx = ∫
1
0
∫ (4 − x
2− x
x
2
− y 2 )dydx
1 16
8
8
V = ∫ + x 3 − 4 x 2 − 4 x dx =
0
3
3 3
V = ∫∫∫ dV =
B
EJEMPLO 3.16
8
3
Determine el volumen del sólido B acotado por las superficies:
y = 4 , y = x2 , z = 0 y z = 4 − y .
Solución:
El cálculo de volumen del sólido B, se realiza por medio de la
integral triple
∫∫∫
B
dV . En la figura 3.25 se ilustra el sólido B de
este ejemplo. Adicionalmente se muestran los valores de la
variable z a la entrada y la salida del recinto B.
UC. Facultad de Ingeniería. Departamento de Matemática.
109
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Valor de z a
la salida de B
z = 4− y
B
Valor de z a
la entrada de B
z=0
Figura 3.25
Sólido B del ejemplo 3.16
Por lo tanto el volumen se obtiene como:
V = ∫∫
D
∫
4− y
0
dzdA
Donde D es la proyección del sólido B sobre el plano xy. Esta
proyección se observa en la figura 3.26.
Valor de y a
la salida de D
y=4
La región D del ejemplo
3.16 es una región tipo 1
D
Valor de y a
la entrada de D
y = x2
Figura 3.26
Proyección del sólido B del ejemplo 3.16 en el plano xy
UC. Facultad de Ingeniería. Departamento de Matemática.
110
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
La región D, del ejemplo 3.16 está definida como:
D=
{( x, y )
−2≤ x ≤ 2 ∧
}
x2 ≤ y ≤ 4
Luego:
V =∫
2
−2
4
4− y
x2
0
∫ ∫
dzdydx = ∫
2
4
2
2
V = ∫∫∫ dV =
B
EJEMPLO 3.17
( 4 − y ) dydx = ∫ − 2 8 − 4 x 2 +
−2 ∫ x
x4
256
dx =
2
15
256
15
Plantear mediante integrales triples el volumen comprendido entre
dos esferas concéntricas de radios 1 y 4.
Solución:
Sea B el sólido mencionado en el ejemplo 3.17. En la figura 3.27
se ilustran las dos esferas concéntricas de radios 1 y 4.
x 2 + y 2 + z 2 = 16
La región tridimensional
comprendida entre las
dos esferas concéntricas
es simétrica respecto al
origen, razón por la cual,
dicha región se divide en
8 partes correspondientes
a cada cuadrante.
B
x2 + y 2 + z 2 = 1
Figura 3.27
Sólido
UC. Facultad de Ingeniería. Departamento de Matemática.
B del ejemplo 3.17
111
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
A continuación se muestra la porción del sólido B que se
encuentra en el primer octante, el cual se denomina como B1.
También se muestran los valores de la variable z a la entrada y la
salida del recinto B1.
Valor de z a
la salida de B1
z = 16 − x 2 − y 2
Valor de z a
la salida de B1
z = 16 − x2 − y 2
B1
Valor de z a
la entrada de B1
Valor de z a
la entrada de B1
z=0
z = 1 − x2 − y 2
Figura 3.28
Sólido B1 del ejemplo 3.17
Entonces:
V = ∫∫∫ dV = 8∫∫∫ dV
B
B1
Como el valor de la variable z cambia a la entrada del sólido B1,
entonces se debe emplear la propiedad aditiva respecto a la
D1
D2
Figura 3.29
Proyección del sólido B1
sobre el plano xy
región de integración, por lo cual:
16 − x 2 − y 2
V = 8∫∫∫ dV = 8 ∫∫ ∫
dzdA + ∫∫ ∫
B1
D2
D1 0
16 − x 2 − y 2
2
1− x − y
2
dzdA
Donde D1 y D2 son las regiones bidimensionales que se obtienen
al proyectar el sólido B1 sobre el plano xy. En la figura 3.29 se
aprecia dicha proyección.
UC. Facultad de Ingeniería. Departamento de Matemática.
112
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Valor de y a
la salida de D1.1
y = 16 − x2
x =1
La región bidimensional
D1 se divide en dos
regiones tipo 1; es decir:
Valor de y a
la salida de D1.2
D1 = D1.1 ∪ D1.2
y = 16 − x2
D1.1
D1.2
Valor de y a
la entrada de D1.1
y = 1− x
Valor de y a
la entrada de D1.2
y=0
2
Figura 3.30
Región D1 del ejemplo 3.17
Entonces, la región D1 viene dada por la unión de las regiones:
{( x, y ) 0 ≤ x ≤ 1 ∧
D = {( x, y ) 1 ≤ x ≤ 4
D1.1 =
1.2
1 − x 2 ≤ y ≤ 16 − x 2
∧ 0 ≤ y ≤ 16 − x 2
Valor de y a
la salida de D2
y = 1 − x2
La región bidimensional
D2 es una región tipo 1.
D2
Valor de y a
la entrada de D2
Figura 3.31
y=0
Región D2 del ejemplo 3.17
UC. Facultad de Ingeniería. Departamento de Matemática.
}
}
113
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Con base a la figura 3.31, se tiene que:
Resolver estas integrales
es un proceso bastante
laborioso; sin embargo
con
un
software
matemático se puede
obtener que el volumen
planteado en el ejemplo
3.17 es:
D2 =
{( x, y )
0 ≤ x ≤ 1 ∧ 0 ≤ y ≤ 1 − x2
}
Por lo tanto, las integrales triples que permiten calcular el volumen
comprendido entre dos esferas concéntricas de radios 1 y 4 son:
V = 8 ( 32.98672287 )
V =8∫
1
0
+8∫
16 − x 2
∫
1
0
1− x 2
∫
1− x 2
0
∫
∫
16 − x 2 − y 2
0
dzdydx + 8∫
4
1
16 − x 2 − y 2
1− x 2 − y 2
∫
16 − x 2
0
∫
16 − x 2 − y 2
0
dzdydx +
dzdydx
3.2.2.MASA DE UN SÓLIDO EN EL ESPACIO
Considere una región tridimesional B , no homogénea, esto es que
su densidad ρ varía en cada punto ( x, y,z ) ∈ B , donde la función
densidad está expresada en unidades de masa por unidad de
volumen, entonces la masa se obtiene como la integral triple de la
función densidad sobre la región B, tal como se define a
continuación:
MASA DE UN SÓLIDO EN EL ESPACIO
Considere un cuerpo tridimensional B de densidad variable
ρ ( x, y,z ) , entonces su masa, denotada m , se obtiene como:
m = ∫∫∫ ρ ( x, y, z ) dV
B
UC. Facultad de Ingeniería. Departamento de Matemática.
(III.31)
114
Geraldine Cisneros
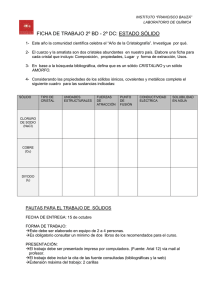
EJEMPLO 3.18
Integrales Múltiples y Sus Aplicaciones
Calcular la masa del sólido comprendido entre los planos: z = 0 y
z = 1 − y y dentro de la superficie definida por la ecuación
x 2 + 4 y 2 = 4 , cuya densidad viene dada por ρ ( x, y , z ) = 2 z
Solución:
El sólido B del ejemplo 3.18 se muestra en la figura 3.32, también
se muestran los valores que toma la variable z a la entrada y salida
de la región B.
Valor de z a
la salida de B
z = 1− y
B
Valor de z a
la entrada de B
z=0
Figura 3.32
Sólido B del ejemplo 3.17
Para calcular la masa del sólido mostrado en la figura anterior, se
emplea la ecuación III.31, donde al sustituir el primer orden de
integración y la función densidad, se obtiene:
m = ∫∫
D
∫
1− y
0
2 zdzdA
donde D es la proyección del sólido B en el plano xy. Esta
proyección, junto con el segundo orden de integración se ilustra en
la figura 3.33
UC. Facultad de Ingeniería. Departamento de Matemática.
115
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Valor de y a
la salida de D
La gráfica de la ecuación:
4 − x2
2
y=
x2 + 4 y2 = 4
Es una elipse horizontal.
D
La región bidimensional
D del ejemplo 3.18 es
una región tipo 1 y
también una región tipo
2.
Valor de y a
la entrada de D
y=−
4 − x2
2
Figura 3.33
Región D del ejemplo 3.18
La región D está definida como:
D = ( x, y )
−2≤ x ≤2 ∧ −
4 − x2
≤ y≤
2
4 − x2
2
Volviendo al cálculo de la masa:
m=∫
2
−2
∫
4− x 2
2
4− x 2
−
2
∫
1− y
0
2 zdzdydx = ∫
1
4 − x2
m=∫
1+
−2 3
2
2
2
−2
3
4 − x2
− 1 −
2
m = ∫∫∫ 2 zdV =
B
EJEMPLO 3.19
∫
4− x2
2
4− x2
−
2
(1 − y )
3
2
dydx
dx = 5π
2
5π
2
Calcular la masa del sólido comprendido entre los paraboloides
z = 4 x 2 + 4 y 2 y z = 8 − 4 x 2 − 4 y 2 , cuya densidad viene dada por
ρ ( x, y , z ) = x + y + z + 1 .
UC. Facultad de Ingeniería. Departamento de Matemática.
116
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Solución:
En la figura 3.34, se muestra el sólido B del ejemplo 3.19 y también
los valores que toma la variable z a la entrada y salida de la región
B, los cuales permiten establecer los límites para la primera
integración parcial.
Valor de z a
la salida de B
z = 8 − 4 x2 − 4 y2
B
Valor de z a
la entrada de B
z = 4 x2 + 4 y 2
Figura 3.34
Sólido
B del ejemplo 3.19
Por lo tanto, la masa se obtiene como:
m = ∫∫
D
∫
8− 4 x 2 − 4 y 2
4 x2 +4 y 2
( x + y + z + 1) dzdA
siendo D la proyección del sólido B en el plano xy. Para determinar
la ecuación de la curva que delimita a esta región D, es necesario
resolver el siguiente sistema:
z = 4 x2 + 4 y 2
2
2
z = 8 − 4x − 4 y
Sumando ambas ecuaciones se tiene que z = 4
UC. Facultad de Ingeniería. Departamento de Matemática.
117
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Sustituyendo el valor de z en la primera ecuación del sistema, se
Recuerde que la gráfica
de la ecuación:
obtiene la ecuación x 2 + y 2 = 1 .
Valor de y a
la salida de D
x + y =1
2
2
y = 1 − x2
Es una circunferencia.
La región D del ejemplo
3.19 puede clasificarse
como una región tipo 1 y
también como una región
tipo 2.
D
Valor de y a
la entrada de D
y = − 1 − x2
Figura 3.35
Región D del ejemplo 3.19
La región D queda definida como:
D=
{( x, y )
− 1 ≤ x ≤ 1 ∧ − 1 − x2 ≤ y ≤ 1 − x2
}
Luego, la masa se obtiene mediante la integral triple
m=∫
m=∫
1
∫
1− x 2
−1 − 1− x 2
1
∫
1− x 2
−1 − 1− x 2
( 40 − 8 x
3
∫
8− 4 x 2 − 4 y 2
4 x2 + 4 y 2
( x + y + z + 1) dzdydx
− 40 x 2 + 8 x − 8 xy 2 − 8 x 2 y + 8 y − 40 y 2 − 8 y 3 ) dydx
1 160
32
160 2
32
m=∫
1 − x2 + x 1 − x2 −
x 1 − x 2 − x 3 1 − x 2 dx = 20π
−1
3
3
3
3
m = ∫∫∫ ( x + y + z + 1) dV = 20π
B
UC. Facultad de Ingeniería. Departamento de Matemática.
118
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
3.2.3.MOMENTOS ESTÁTICOS
El momento estático de una región B tridimensional respecto a los
planos coordenados xy, yz y xz, se definen de la siguiente manera:
MOMENTOS ESTÁTICOS DE UN SÓLIDO EN EL ESPACIO
Sea B un recinto del espacio, tal que su densidad viene dada
por la función ρ :
3
, la cual es continua ∀ ( x, y,z ) ∈ B ,
→
entonces los momentos estáticos alrededor de los planos xy,
yz y xz, denotados M xy , M yz y M xz , respectivamente, se
obtienen a partir de las siguientes expresiones:
M xy = ∫∫∫ z ρ ( x, y, z ) dV
(III.32)
M yz = ∫∫∫ x ρ ( x, y, z ) dV
(III.33)
M xz = ∫∫∫ y ρ ( x, y, z ) dV
(III.34)
B
B
B
EJEMPLO 3.20
Calcular los momentos estáticos alrededor de los planos
coordenados para el sólido descrito en el ejemplo 3.18.
Solución:
El sólido B del ejemplo 3.18 se definió como:
4 − x2
4 − x2
B = ( x, y,z ) − 2 ≤ x ≤ 2 ∧ −
≤ y≤
2
2
∧ 0 ≤ z ≤ 1− y
Calculando los momentos estáticos por medio de las ecuaciones:
III.32, III.33 y III.34, se tiene:
UC. Facultad de Ingeniería. Departamento de Matemática.
119
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
M xy = ∫
2
−2
∫
4− x2
2
4− x2
−
2
∫
1− y
z ( 2 z ) dzdydx = ∫
0
2
−2
∫
4 − x2
2
4− x2
−
2
2 (1 − y )
dydx
3
3
3
2 2
1
7π
M xy = ∫ 4 − x 2 + ( 4 − x 2 ) 2 dx =
−2 3
6
3
Respecto al plano yz:
M yz = ∫
2
−2
∫
4− x2
2
4− x2
−
2
∫
1− y
x ( 2 z ) dzdydx = ∫
0
2
−2
∫
4 − x2
2
4− x2
−
2
x (1 − y ) dydx
2
3
2
1
M yz = ∫ x 4 − x 2 + x ( 4 − x 2 ) 2 dx = 0
−2
12
Y finalmente, respecto al plano xz:
M xz = ∫
2
−2
∫
4− x2
2
4− x2
−
2
∫
1− y
0
y ( 2 z ) dzdydx = ∫
2
−2
∫
4− x2
2
4 − x2
−
2
y (1 − y ) dydx
2
3
2 1
M xz = ∫ − ( 4 − x 2 ) 2 dx = −π
−2
6
M xy = ∫∫∫ z ( 2 z ) dV =
B
7π
3
M yz = ∫∫∫ x ( 2 z ) dV = 0
B
M xz = ∫∫∫ y ( 2 z ) dV = −π
B
EJEMPLO 3.21
Calcular los momentos estáticos alrededor de los planos
coordenados para el sólido descrito en el ejemplo 3.19.
Solución:
El sólido B del ejemplo 3.19 está definido como:
B=
{( x, y,z ) − 1 ≤ x ≤ 1 ∧ −
1 − x2 ≤ y ≤ 1 − x2 ∧ 4 x2 + 4 y 2 ≤ z ≤ 8 − 4x2 − 4 y 2
UC. Facultad de Ingeniería. Departamento de Matemática.
}
120
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Calculando el momento estático respecto al plano xy:
M xy = ∫
M xy = −
M xy = ∫
1
−1
∫
1− x 2
− 1− x 2
∫
8− 4 x 2 − 4 y 2
4 x2 + 4 y2
z ( x + y + z + 1) dzdydx
32 1 1− x2
( 4 x 4 − 8x 2 + 8 x2 y 2 + 3x − 8 y 2 + 3 y + 4 y 4 + 19 )( x 2 + y 2 − 1) dx
3 ∫ −1 ∫ − 1− x2
1
−1
34688 2 128 3 4096 4 4096 6 272π
8832 128
x−
x −
x +
x −
x =
1 − x2
+
3
105
3
35
105
3
35
Respecto al plano yz:
M yz = ∫
1
−1
∫
1− x 2
− 1− x 2
M yz = −8∫
M yz = ∫
1
−1
1
∫
8− 4 x 2 − 4 y 2
4 x2 + 4 y2
1− x 2
∫
−1 − 1− x 2
x ( x + y + z + 1) dzdydx
x ( x + 5 + y ) ( x 2 + y 2 − 1) dx
32
160 3 32 4 2π
160
x + x2 −
x − x =
1 − x2
3
3
3 3
3
Respecto al plano xz:
M xz = ∫
1
∫
1− x 2
−1 − 1− x 2
M xz = −8∫
1
−1
∫
∫
8− 4 x 2 − 4 y 2
4 x2 + 4 y 2
1− x 2
− 1− x 2
y ( x + y + z + 1) dzdydx
y ( x + 5 + y ) ( x 2 + y 2 − 1) dx
32 1 − x 2
2π
M xz = ∫
1 − 2 x2 + x4 ) =
(
−1
15
3
1
Entonces, para el sólido del ejemplo 3.19 se tiene:
272π
B
3
2π
M yz = ∫∫∫ x ( x + y + z + 1) dV =
B
3
2π
M xz = ∫∫∫ y ( x + y + z + 1) dV =
B
3
M xy = ∫∫∫ z ( x + y + z + 1) dV =
UC. Facultad de Ingeniería. Departamento de Matemática.
121
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
3.2.4. CENTRO DE MASA
A continuación se define el centro de masa para un sólido
tridimensional como un punto P ( x, y,z ) , donde las coordenadas
de este punto se obtienen de las ecuaciones:
M yz
x=
m
y=
z=
M xz
m
M xy
m
(III.35)
(III.36)
(III.37)
Entonces:
CENTRO DE MASA DE UN SÓLIDO DEL ESPACIO
Sea B un recinto del espacio, tal que su densidad viene dada
por la función ρ :
3
→
, la cual es continua ∀ ( x, y,z ) ∈ B ,
entonces el centro de masa es un punto P ( x , y ,z ) , donde sus
coordenadas son:
x=
1
x ρ ( x, y, z ) dV
m ∫∫∫B
(III.38)
y=
1
y ρ ( x, y, z ) dV
m ∫∫∫B
(III.39)
z=
1
z ρ ( x, y, z ) dV
m ∫∫∫B
(III.40)
Donde m es la masa del sólido B , que se obtiene como
m = ∫∫∫ ρ ( x, y, z ) dV .
B
UC. Facultad de Ingeniería. Departamento de Matemática.
122
Geraldine Cisneros
EJEMPLO 3.22
Integrales Múltiples y Sus Aplicaciones
Determine las coordenadas del centro de masa del sólido B
descrito en el ejemplo 3.18.
Solución:
Para el ejemplo 3.18 se
obtuvo:
m = ∫∫∫ 2 zdV =
B
5π
2
M xy = ∫∫∫ z ( 2 z ) dV =
B
Las coordenadas del centro de masa del sólido B se obtienen
empleando las ecuaciones III.38, III.39 y III.40;
sin embargo,
como en el ejemplo 3.20 se calcularon los momentos estáticos
7π
3
M yz = ∫∫∫ x ( 2 z ) dV = 0
alrededor de los planos coordenados, a continuación se utilizan las
ecuaciones III.35, III.36 y III.37:
B
M xz = ∫∫∫ y ( 2 z ) dV = −π
x=
B
y=
M yz
m
=
0
=0
5π
2
M xz
−π
2
=
=−
5π
5
m
2
7π
14
= 3 =
z=
5π
15
m
2
M xy
Entonces:
2 14
P ( x , y ,z ) = 0 , − ,
5 15
2 14
0, − ,
5 15
B
Figura 3.36
Centro de gravedad del sólido
UC. Facultad de Ingeniería. Departamento de Matemática.
B del ejemplo 3.18
123
Geraldine Cisneros
EJEMPLO 3.23
Integrales Múltiples y Sus Aplicaciones
Determine las coordenadas del centro de gravedad del sólido
descrito en el ejemplo 3.19.
Solución:
Para el ejemplo 3.19 se
obtuvo:
Las coordenadas del centro de masa del sólido B, igual que en el
m = ∫∫∫ ( x + y + z + 1) dV = 20π
ejemplo anterior, se obtienen a partir de las ecuaciones III.35,
B
272π
3
2π
M yz =
3
2π
M xz =
3
M xy =
III.36 y III.37:
M yz
x=
m
3= 1
20π 30
2π
M xz
3= 1
=
20π 30
m
y=
z=
=
2π
M xy
m
=
272π
3 = 68
20π
15
Entonces:
1 1 68
P ( x , y ,z ) = , ,
30 30 15
En la siguiente figura, se aprecia el centro de masa del sólido B.
1 1 68
, ,
30 30 15
B
Figura 3.37
Centro de gravedad del sólido
UC. Facultad de Ingeniería. Departamento de Matemática.
B del ejemplo 3.19
124
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
3.2.5. MOMENTOS DE INERCIA
Los momentos de inercia del sólido B respecto a los planos
coordenados, se obtienen como sigue:
MOMENTOS DE INERCIA DE FIGURAS PLANAS
Sea B un recinto del espacio, tal que su densidad viene dada
por la función ρ :
3
, la cual es continua ∀ ( x, y,z ) ∈ B ,
→
entonces los momentos de inercia alrededor de los ejes
coordenados, denotados I x , I y e I z se obtienen a partir de:
I x = ∫∫∫ ( y 2 + z 2 ) ρ ( x, y , z ) dV
(III.41)
I y = ∫∫∫ ( x 2 + z 2 ) ρ ( x, y, z ) dV
(III.42)
I z = ∫∫∫ ( x 2 + y 2 ) ρ ( x, y, z ) dV
(III.43)
B
B
B
El momento polar de inercia, I 0 , es:
I 0 = ∫∫∫ ( x 2 + y 2 + z 2 ) ρ ( x, y, z ) dV
B
EJEMPLO 3.24
(III.44)
Calcular los momentos de inercia alrededor de los ejes
coordenados y respecto al origen para el sólido descrito en el
ejemplo 3.18.
Solución:
El sólido B mencionado está definido como:
4 − x2
4 − x2
B = ( x, y,z ) − 2 ≤ x ≤ 2 ∧ −
≤ y≤
2
2
∧ 0 ≤ z ≤ 1− y
Calculando los momentos estáticos por medio de las ecuaciones:
III.41, III.42 y III.43, se tiene:
UC. Facultad de Ingeniería. Departamento de Matemática.
125
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Ix = ∫
2
Ix = ∫
2
−2
∫
−2
4− x2
2
4− x2
−
2
∫
4− x2
2
4− x2
−
2
∫ (y
1− y
2
0
+ z 2 ) ( 2 z ) dzdydx
4
2
1
2
2 (1 − y ) + y (1 − y ) dydx
5
3
2 1
3
1
27π
I x = ∫ 4 − x2 +
4 − x 2 ) 2 + ( 4 − x 2 ) 2 dx =
(
−2 2
160
3
8
Respecto al eje y:
Iy = ∫
Iy = ∫
2
−2
2
−2
∫
∫
4− x2
2
4− x2
−
2
4− x2
2
4 − x2
−
2
∫ (x
1− y
0
2
+ z 2 ) ( 2 z ) dzdydx
4
2
1
2
2 (1 − y ) + x (1 − y ) dydx
4 − x2 5 2
(
) + ( 3 + x 2 ) 4 − x2 3 2 + 4 − x 2 1 + x 2 dx = 119π
Iy = ∫
(
)
−2
160
12
24
2
2
Respecto al eje z:
Iz = ∫
2
−2
∫
4− x2
2
4 − x2
−
2
∫ (x
1− y
2
0
+y
2
) ( 2 z ) dzdydx = ∫ ∫
2
−2
4− x2
2
4− x2
−
2
(y
2
+ x 2 ) (1 − y ) dydx
2
5
3
2 1
1
37π
I z = ∫ ( 4 − x 2 ) 2 + (1 + x 2 )( 4 − x 2 ) 2 + x 2 4 − x 2 dx =
− 2 80
12
12
Finalmente, el momento polar de inercia:
I0 = ∫
I0 = ∫
2
−2
2
−2
∫
∫
4− x2
2
4− x2
−
2
4− x2
2
4 − x2
−
2
∫ (x
1− y
0
2
+ y 2 + z 2 ) ( 2 z ) dzdydx
4
2
1
2
2
2 (1 − y ) + ( y + x ) (1 − y ) dydx
UC. Facultad de Ingeniería. Departamento de Matemática.
126
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
3 4 − x2 52
3
4 + x2 )
(
)
(
4 − x2
137π
2
2
2
2
4− x ) +
I0 = ∫
+
+ x 4 − x dx =
(
−2
160
12
2
24
2
27π
8
119π
I y = ∫∫∫ ( x 2 + z 2 ) ( 2 z ) dV =
B
24
37π
I z = ∫∫∫ ( x 2 + y 2 + z 2 ) ( 2 z ) dV =
B
12
137π
I 0 = ∫∫∫ ( x 2 + y 2 + z 2 ) ( 2 z ) dV =
B
24
I x = ∫∫∫ ( y 2 + z 2 ) ( 2 z ) dV =
B
EJEMPLO 3.25
Calcular los momentos de inercia alrededor de los ejes
coordenados para el sólido descrito en el ejemplo 3.19.
Solución:
Para resolver las integrales
que permiten calcular los
momentos
de
inercia
pedidos en el ejemplo 3.25
se ilustra sólo el segundo
momento respecto al eje x.
Los demás resultados
fueron calculados con un
software matemático.
El sólido B del ejemplo 3.19 está definido como:
B=
{( x, y,z ) − 1 ≤ x ≤ 1 ∧ −
1 − x2 ≤ y ≤ 1 − x2 ∧ 4 x2 + 4 y 2 ≤ z ≤ 8 − 4x2 − 4 y 2
Calculando los momentos de inercia:
Ix = ∫
1
∫
1− x 2
−1 − 1− x 2
∫
8− 4 x 2 − 4 y 2
4 x2 + 4 y 2
(y
2
+ z 2 ) ( x + y + z + 1) dzdydx
8 1 1− x2 2
( x + y 2 − 1) 16 ( x5 + y5 ) + 16 x 4 (13 + y ) +
3 ∫ −1 ∫ − 1− x2
+ 32 x3 ( y 2 − 1) + 32 x 2 (13 y 2 + y 3 − y − 13) + 16 x ( 3 + y 4 ) +
Ix = −
+ y 2 ( −29 x − 401) + y ( 64 + 208 y 3 − 29 y 2 ) + 448] dydx
UC. Facultad de Ingeniería. Departamento de Matemática.
}
127
Geraldine Cisneros
Integrales Múltiples y Sus Aplicaciones
Ix = ∫
1 − x2
(143968 + 22240 x − 251584 x 2 − 30656 x3 +
−1 105
+ 160864 x 4 + 12512 x5 − 53248 x 6 − 4096 x 7 ) dx
1
I x = 462π
Los momentos de inercia respecto a los ejes coordenados y al
origen para el sólido del ejemplo 3.19, se muestran a continuación:
I x = ∫∫∫ ( y 2 + z 2 ) ( x + y + z + 1) dV = 462π
B
I y = ∫∫∫ ( x 2 + z 2 ) ( x + y + z + 1) dV = 462π
B
20π
3
1396π
I 0 = ∫∫∫ ( x 2 + y 2 + z 2 ) ( x + y + z + 1) dV =
B
3
I z = ∫∫∫ ( x 2 + y 2 + z 2 ) ( x + y + z + 1) dV =
B
UC. Facultad de Ingeniería. Departamento de Matemática.