teoría de mecanismos 2.- resistencias pasivas
Anuncio

TEORÍA DE MECANISMOS
2.- RESISTENCIAS PASIVAS
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
1
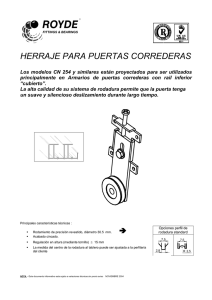
Trabajo motriz, resistente y útil
Flujo energético de una máquina
Trabajo motriz
(entrada)
MAQUINA
GENÉRICA
(rendimiento)
Trabajo pasivo
(resistencias pasivas)
de contacto, al medio
resistencias interiores
Wutil
η=
Wmotriz
Trabajo útil
(salida)
Trabajo resistente
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
2
Resistencias pasivas en pares elementales
Contacto entre sólidos: Suponemos un contacto puntual
G G
entre dos eslabones
{
Par de Vectores ≡ R , Φ
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
}
3
Resistencia Pasiva: rozamiento al
deslizamiento
µ
T F
tg ϕ = =
N P
tg ϕ = µ
Coeficiente de rozamiento
G
estático.
1+ α v
µ (v) = µ0
G
1+ β v
[ v ≥ 5 m s]
µ ≡ [ 0.1, 0.7 ]
⎡1
2
⎤
µ (v) ≡ ⎢ µ0 , µ0 ⎥
3 ⎦
⎣2
de rozamiento
µ0 Coeficiente
dinámico.
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
4
Propiedades del coeficiente de rozamiento
al deslizamiento (µ)
Depende de la naturaleza de las superficies
en contacto
Depende del estado de las superficies en
contacto
Depende dela disposición relativa de las
superficies en contacto
Depende de la duración del evento de
rozamiento
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
5
Trabajo producido por deslizamiento
a velocidad v
Diferencial de trabajo
dW = µ Nds
Potencia
P = dW
= µ Nv
dt
Pérdidas por desgaste y
calentamiento
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
6
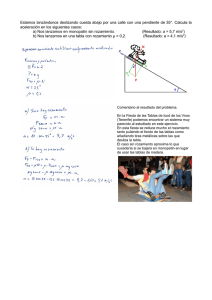
Cono de deslizamiento
Rozamiento al
deslizamiento
G
R
Lugar
geométrico,
límite al
deslizamiento
Eslabón 2
Resultante de fuerzas
exteriores de 2 sobre
1.
ϕ = arctg ( µ )
Eslabón 1
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
7
Desgaste en maquinaria
Bajo rozamiento
Deslizamiento en correderas, levas, excéntricas y
engranajes
µ = 0.12 ϕ = 7º
Pares de rotación
Pares sin engrase
µ = 0.10
µ = 0.20
ϕ = 6º
ϕ = 12º
Alto rozamiento
frenos
µ = 0.30
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
ϕ = 17º
8
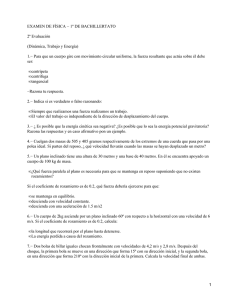
Rozamiento por rodadura
G
Acción exterior: F en G B
− F en A + Φ ROD en A
G
Se aplica el Gcilindro N12
Se aplica
FG en B
G
Reacción rodadura:
G G
G
F G≤ FR = µ N
F < T
Si
no hay
deslizamiento
G
F debe alcanzar un valor
denominado PAR DE
RESISTENCIA A LA
RODADURA
Φ
ROD
=δ ⋅ N
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
9
Rozamiento por rodadura
Modelo del par de rodadura a vencer
Rodadura cilindro recto sobre una superficie
plana
Rodadura
Rodadura+deslizamiento
deslizamiento
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
10
Desgaste en maquinaria por rodadura
Rodadura
Maderas:
δ = 0.8 mm
Acero templado:
δ = 0.01mm
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
11
Rodadura entre dos superficies con
elasticidades similares
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
12
Puntos de contacto
Hay deslizamiento + rodadura
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
13
Propiedades del coeficiente de rozamiento
a la rodadura (d)
Depende de la velocidad de la rodadura
Depende de las propiedades elásticas de las
superficies en contacto
Depende de la temperatura de las
superficies en contacto
Depende de la presión específica
Depende de los radios de curvatura del
contacto
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
14
Resistencia al pivotamiento
dT = µ ⋅ dN
Pares fuerzas rozamiento en el contacto respecto a N
d Φ P IV = 2 ⋅ r⋅ dT = 2 ⋅ r⋅ µ ⋅ dN ;
Φ P = ∫∫ 2 ⋅ r⋅ dT = 2 ⋅ µ ⋅ ∫∫ r⋅ d N
σ
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
σ
15
Teoría de Hertz
l = 3 N ⋅ f ( l1 , E1 , l2 , E 2 )
Φ PIV = 0.093 ⋅ µ ⋅ l ⋅ N
la
>
“Cinemática y dinámica de
Máquinas” A. de Lamadrid, A. de
Corral, UPM, Madrid 1992
Φ PIV = µ P ⋅ N
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
lb
>
lc
Depende de la carga y de las
características de los materiales
µ PIV ( µ ROD ≡ δ )
16
Movimiento a la deriva
Dirección de deriva
Nueva dirección de
deriva
G
F
G G
F+f
Deslizamiento (m)
Deslizamiento (n)
“Cinemática y dinámica de
Máquinas” A. de Lamadrid, A. de
Corral, UPM, Madrid 1992
n
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
17
Movimiento a la deriva: aplicación
“Cinemática y dinámica de
Máquinas” A. de Lamadrid, A. de
Corral, UPM, Madrid 1992
Dirección de
deriva
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
Movimiento inicial de
deriva
18
Análisis de rigidez en correas
Ecuación de equilibrio
P⋅ r = Q⋅ r
d: grosor
“Cinemática y dinámica de
Máquinas” A. de Lamadrid, A. de
Corral, UPM, Madrid 1992
P⋅ ( r- e′ ) = Q⋅ ( r + e′′ )
⎛ r + e′′ ⎞
⋅Q
P=⎜
⎟
⎝ r- e′ ⎠
P = (1 + K ) ⋅ Q
2
d
K = c⋅
2⋅r
⎛ r + e′′ ⎞
>1
⎜
⎟
⎝ r- e′ ⎠
Coeficiente
de rigidez
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
19
Resistencias pasivas: órganos
deformables
CUERDAS, CORREAS, CABLES, CADENAS
Ecuación de equilibrio: teórica, real
Coeficiente de rigidez (1+K)
2
cd
K=
2r
(coulomb, Navier, Redtenbacker)
Tipo
Cables metálicos
Cuerdas cáñamo
Cuerdas cáñamo usada
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
C
-1
58 m
-1
26 m
-1
18 m
20
Cálculo aproximado de la desviación
e′ = e′′ = e
r+ e)
1 + 2e
(
1+ K =
1+ K =
( r− e)
( r− e)
r e 2e
Hipótesis
Hipótesis.
1+ K = 1 +
r
Ecuación exp. Coulomb, …..
2
cd
K=
2r
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
⎛d⎞
e = c⎜ ⎟
⎝2⎠
2
21
Análisis de la rigidez en cadenas
Sea β el ángulo entre pernos y dα< β
Un giro diferencial dα, produce un giro diferencial
equivalente tanto en el par elemental de entrada
como en el de salida
Los pares apoyados sobre la polea de la cadena no
tienen movimiento relativo (no hay R.P.)
Los pares elementales con R.P. Se encuentran a la
entrada y salida del engrane de los eslabones
Momento resistente en la articulación (eslabónperno-eslabón)
1
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
M = Fd µ
2
22
Resistencias pasivas: cadenas
Ecuación de conservación energía
Par motriz
= P⋅ r
= − Q⋅ r
Par carga
Par motriz = Par carga + Par rozamiento
Par rozamiento P =1 2 Pd µ
Par rozamiento Q = −1 2Qd µ
Balance energético d α
P⋅ r ⋅ d⋅ α = Q⋅ r⋅ d⋅ α + 1 2 ( P⋅ d⋅ µ + Q⋅ d⋅ µ ) ⋅ d⋅ α
P⋅ r⋅ d⋅ α = Q⋅ r⋅ d⋅ α + 1 2 ( P + Q ) ⋅ d⋅ µ ⋅ d⋅ α
Coeficiente de rigidez (1 + K )
P = Q (1 + µ d r )
Hipótesis: P=Q, entonces: P+Q=2Q
K = µd r
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
23
Expresión de la rigidez K en cadenas
“Cinemática y dinámica de
Máquinas” A. de Lamadrid, A. de
Corral, UPM, Madrid 1992
t+ ∆t
(2,3,4,5)
Par de rozamiento
M ROZ
1
= ⋅ F⋅ d⋅ µ
2
t+∆t
t
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
24
Ejemplos de máquinas
“Cinemática y dinámica de
Máquinas” A. de Lamadrid, A. de
Corral, UPM, Madrid 1992
Prensa de cuñas
Freno de Prony
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
25
Ejemplos de máquinas
Mecanismo de arrastre
por rodillo
Arrastre
por guía
prismática
Tren de
laminación
“Cinemática y dinámica de
Máquinas” A. de Lamadrid, A. de
Corral, UPM, Madrid 1992
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
26