CAPÍTULO 2. RESISTENCIAS PASIVAS
2.1. Introducción
Son aquellas internas o externas a los elementos que constituyen un mecanismo,
que de una forma u otra, se oponen al movimiento relativo de los mismos.
Aparecen como consecuencia de los esfuerzos que se desarrollan en el contacto
entre dichos elementos, y dan lugar al concepto de rendimiento en las máquinas.
FUTILES + RPASIVAS = FMOTRIZ
WUTILES + WRESISTENTES = WMOTRIZ
η=
WUTILES
W
= 1 − RESISTENTES
WMOTRIZ
WMOTRIZ
- Clases de resistencias
1. Del medio ambiente. (Fluido)
Las máquinas se mueven dentro de un medio fluido, normalmente aire, lo que
implica resistencias a vencer. Tienen gran importancia en aviones, automóviles, barcos,
ventiladores, etc.
2. Internas estructurales. (Deformación)
Las fuerzas aplicadas producen deformaciones dentro de los miembros de las
máquinas y, al no ser estos perfectamente elásticos, parte de esta energía se pierde. Esto
ocurre por ejemplo en las transmisiones por correas, cables, etc.
3. De contacto en un par de elementos. (Rozamiento)
En las máquinas suelen ser las más importantes, por lo que las anteriores a
menudo no se tienen en cuenta. Se dividen en
-
Resistencia el deslizamiento.
-
Resistencia a la rodadura.
-
Rozamiento de pivotamiento.
1
- Resistencias pasivas en el contacto de dos sólidos
Debido a la deformación que se produce en el contacto entre dos sólidos, la zona
de contacto es una superficie, normalmente de área muy pequeña.
El sistema de fuerzas en esta zona se reduce a una resultante R y a un par
resultante φ, los cuales pueden descomponerse en una dirección normal y otra
tangencial.
R: resultante de las fuerzas en el contacto.
N: reacción normal.
T: resistencia al deslizamiento.
φ: par resultante.
φ n : Momento de resistencia al pivotamiento.
φt : Momento de resistencia a la rodadura.
2
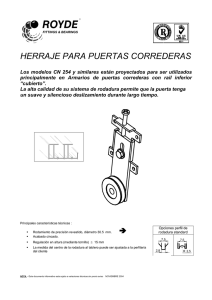
2.2 Resistencia al deslizamiento
Consideremos un cuerpo apoyado sobre una superficie horizontal y sometido a
la acción de una fuerza vertical P y una horizontal de tracción F, como se muestra en la
figura.
En este caso podremos distinguir dos situaciones diferentes
a) En el equilibrio
Cuando el cuerpo no se mueve, la fuerza tractora F es igual a la resistencia al
deslizamiento T, hasta alcanzar un valor máximo que viene dado por
T =µ N
µ = coeficiente de rozamiento, que depende
* De la naturaleza de las superficies.
* Del estado de las mismas.
* De la disposición relativa de las superficies.
Además, µ es INDEPENDIENTE de la carga normal y del área de contacto.
tg ϕ =
F T
= =µ
P N
ϕ = ángulo de rozamiento.
Esta relación es constante para los mismos cuerpos en contacto al variar P.
3
Por lo tanto, en este caso el rozamiento T NO ES CONTANTE, sino que
depende de la fuerza aplicada sobre el cuerpo, hasta llegar al límite expresado en la
igualdad anterior.
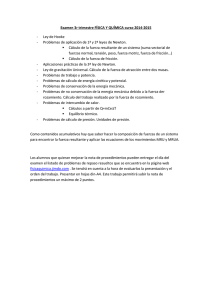
b) En el movimiento
Una vez iniciado el movimiento, el valor de T disminuye, siendo ahora
T =µ N
el cual es constante durante el movimiento del cuerpo (siempre que se mantenga el
estado de cargas). Por lo tanto se tiene un valor menor de resistencia al deslizamiento
µ < µ0
como se puede observar en la siguiente curva
T
Equilibrio
estático
Deslizamiento
µo N
µN
F
El trabajo elemental de rozamiento será
dW = F ⋅ dS = µ ⋅ N ⋅ dS
y la potencia perdida por rozamiento
P = F ⋅v = µ ⋅ N ⋅v
4
Esta potencia se traduce en el desgaste y calentamiento de las superficies
rozantes, produciendo el primero desajuste en las piezas de las máquinas y ambas un
sensible consumo de energía.
Esta figura muestra el denominado cono de rozamiento, que es el cono cuyo eje
tiene la dirección de N y cuyo semiángulo en el vértice es ϕ.
5
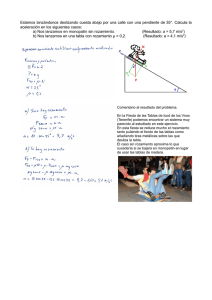
2.3 Resistencia a la rodadura
Cuando sobre un cilindro se aplica una fuerza F pequeña, a una distancia AB, se
observa que el cilindro no sólo no desliza sino que TAMPOCO RUEDA, lo que indica
la existencia de un MOMENTO DE RESISTENCIA A LA RODADURA, que se opone
al movimiento y cuyo calor es
φ =δ ⋅ N
d = coeficiente de resistencia a la rodadura
* Suele expresarse en mm.
* Deriva de que el contacto, en realidad, es superficial.
N
δ
6
Luego para tener en cuenta la resistencia a la rodadura basta trasladar la reacción
normal paralelamente a si misma en la dirección adecuada para dar un par φ que se
oponga a la rodadura.
Factores de los que depende d
* Naturaleza de los cuerpos y propiedades elásticas.
* Forma, posición y dimensiones de las superficies.
* Estado de las superficies, rugosidad.
* Valor de los esfuerzos aplicados, presión normal y esfuerzos tangenciales.
* Velocidad del movimiento.
* Temperatura.
El trabajo de resistencia a la rodadura será
dWr = φr ⋅ d θ = d ⋅ N ⋅ dθ
y si d y N son constantes, se cumple
Wr = ∫ d ⋅ N ⋅ dθ = d ⋅ N ⋅θ
siendo ? el ángulo girado.
La potencia consumida en rodadura es
P = φr ⋅ ω = d ⋅ N ⋅ ω
donde ? es la velocidad angular
7
2.4 Resistencia de pivotamiento
Un cuerpo no gira en torno a un eje hasta que no se sobrepasa un cierto par de
valor finito φ p , que se produce como consecuencia del rozamiento en el deslizamiento
de las superficies de contacto.
En el caso más general la zona de contacto es una elipse.
La resistencia al deslizamiento elemental es
dT = µ dN
luego
d φ = 2 r dT = 2r µ dN
φ P = ∫ 2r dT = 2 µ
σ
∫ rdN
σ
es el par de resistencia al pivotamiento.
La teoría de Hertz sobre deformación de cuerpos elásticos sometidos a
compresión determina la distribución de esfuerzos en la zona de contacto, llegando a la
ecuación siguiente
φP = 0.093 ⋅ µ ⋅ l ⋅ N
donde l es la longitud de la elipse de contacto.
8
φ P = 0.093 ⋅ µ ⋅ N ⋅ 3 N ⋅ f (ρ 1, ρ 2 , E1, E2 ) = µ P ⋅ N
µp = coeficiente de resistencia al pivotamiento de dimensiones lineales, como en la
rodadura
µ P = 0.093 ⋅ µ ⋅ 3 N ⋅ f ( ρ 1 , ρ 2 , E1 , E 2 )
Este valor µp depende
- De la naturaleza y estado de las superficies a través de µ.
- De los radios de curvatura de las superficies de contacto ρ1 y ρ2 .
- De los coeficientes de elasticidad de los materiales E1 y E2 .
- De la raíz cúbica de la carga normal N.
- También el valor de µp es mayor en el arranque.
El trabajo elemental de resistencia al pivotamiento será
dWP = φP ⋅ dθ = µ P ⋅ N ⋅ dθ
mientras que la potencia consumida en pivotamiento es
N = φ P ⋅ ω = µ P ⋅ N ⋅ω
9
 0
0