ω ξ ω β sin ω β sin ω β ϖ ω β ϖ ω ψ ψ ψ ψ ψ ψ ψ ψ ψ ω β ψ ω ϖ β ψ
Anuncio

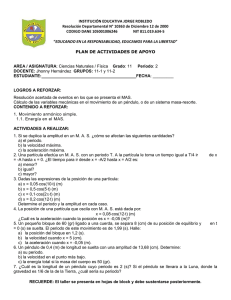
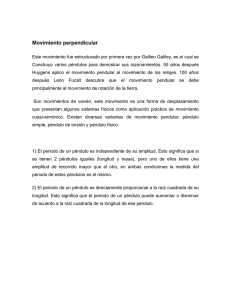
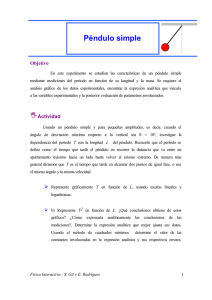
158 CAPÍTULO 9 PÉNDULO EXCITADO PARAMÉTRICAMENTE 9.1 OBJETIVO: El alumno analizará las vibraciones pramétricas en un péndulo excitado para diferentes parámetros como lo son: amplitud, frecuencia, y ángulo de excitación. 9.2 INTRODUCCIÓN TEÓRICA Figura 9.1 Diagrama de fuerzas del Péndulo El punto O vibra en la dirección definida por el ángulo β de manera armónica con amplitud A y frecuencia ϖ . ξ (t ) = A sin ωt (1) Puede ser presentada por dos componentes Xo = A cos β sin ωt , Yo = A sin β sin ωt (2) La fuerza de inercia tiene dos componentes como resultado de la vibración en dos direcciones. Ix = mAϖ 2 cos β sin ωt , Iy = mAϖ 2 sin β sin ωt (3) El movimiento del péndulo es descrito por: Iψ&& + cψ& = − mge sinψ + Ixe sinψ − Iye cosψ = F (ψ ) + P ′(ψ , ωt ) (4) Donde F (ψ ) = − mge sinψ P ′(ψ , ωt ) = mAω 2 (sinψ cos β − cosψ sin β ) sin ϖt = mAω 2 sin(ψ − β ) sin ωt (5) Donde c es el coeficiente de amortiguamiento. 159 9.3 ENCONTRANDO LOS PÁRAMENTROS QUE DEFINEN EL COMPORTAMIENTO DE NUESTRO SISTEMA Este péndulo físico tendrá la capacidad de vibrar en el pivote en diferentes direcciones con la siguiente función de movimiento. y(t) = Y cosωt (6) Donde Y es la amplitud y ω es la frecuencia de oscilación. Desde que el péndulo entero acelera en la dirección vertical, la aceleración neta esta dada por: oo (7) g − y ( t ) = g − ω 2Y cos ωt Y la ecuación de movimiento del péndulo físico puede ser escrita como: oo oo I θ + m(g − y )lsin θ = 0 (8) Para deflexiones pequeñas cerca de θ = 0 , sin θ ≈ θ y la ecuación se reduce a: oo ml (g + ω 2Y cos ωt )θ = 0 Bθ + (9) 2 τ = ωt 2 2 d θ 2 d θ = ω (10) dt 2 dτ 2 Bϖ 2 * d 2θ ml + g + ω 2Y cosτ θ = 0 2 dτ 2 ( ) d 2θ ⎛ mgl mlY ⎞ +⎜ + cosτ ⎟θ = 0 2 2 2B dτ ⎝ 2 Bϖ ⎠ (11) (12) a= mgl 2 Bϖ 2 (13) ε= mlY 2B (14) d 2θ + (a + ε cosτ )θ = 0 dτ 2 (15) Donde: m- masa g- gravedad l- longitud del péndulo B- momento de inercia ω- frecuencia de excitación Y- amplitud Según la gráfica de la figura 1.1 tenemos los siguientes límites que definen las regiones estables y no estables. Para la región inestable tenemos los siguientes límites: 1 ε 1 ε − <a< + (11) 4 2 4 2 Para operar dentro de la región estable tenemos es siguiente límite: 160 − ε2 <a (12) 2 Donde ε es nuestro parámetro constante y a es nuestro parámetro variable como se muestra en la Figura 1.1. Para observar que tipo de comportamiento tenemos en el péndulo graficamos los valores de α y ε en el plano. Estas ecuaciones parabólicas se les conocen como curvas de transición las cuales dividen el plano en regiones estables y no estables. La inestabilidad esta representada por la zona asurada y viceversa para la zona de estabilidad. También se puede notar que la estabilidad e inestabilidad puede presentarse para diversos rangos de α . Por lo tanto si se seleccionan adecuadamente los parámetros, el péndulo puede ser diseñado para operar en regiones estables. a Parámetro Variable ε Parámetro constante Figura 9.2 Regiones estables y no estables en la ecuación de Mathieu 9.4 CÁLCULO DE LA FRECUANCIA NATURAL La frecuencia natural está dada por la siguiente ecuación: ω 0 = meg / I m- masa e- distancia al centro de masa g- gravedad I- momento de inercia (13) 161 9.5 BANCO Y PRINCIPIO DE TRABAJO Figura 9.3 Isométrico de Bando de Vibraciones A = 0.25mm, 5mm, 8mm, 16mm. Figura 9.4 Plano frontal del Banco de Vibraciones 9.6 PARÁMETROS DEL PÉNDULO Rango de excitación: 0 a 1725rpm (0 a 180.64 rad/seg) Amplitudes: 2.5mm, 5mm, 8mm y 16mm Angulo de excitación: 0 a 30o Material: Aluminio 6061-T6 Densidad: 2700 Kg/m3 Volumen: 4669.83 mm3 Masa: 0.014Kg Longitud: 159mm Centro de masa: 59.06mm Área de superficie: 3810.72 mm2 Figura 9.5 Péndulo 162 9.7 REALIZAR EXPERIMENTO 9.7.1 CÁLCULOS: 1. Calcular los rangos de frecuencias estables e inestables con los parámetros dados para cada amplitud del péndulo. 2. Calcular la frecuencia natural del péndulo 3. Comprobar los resultados teóricos y prácticos Longitud [m] gravedad [m/s^2] Masa Aluminio[kg] Amplitud [m] Intervalo Inferior de resonancia [rad] α/w^2 Intervalo Intervalo Superior Inferior de de resonancia resonancia [rpm] [rad] є Densidad [kg/m^3] Masa Péndulo [kg] Momento de Inercia [kg*m^2] Intervalo Inferior 1/4-є/2 Intervalo Superior de resonancia [rpm] Volumen [m^3] Intervalo Superior 1/4+є/2 Diferencia entre frecuencias de resonancia [rpm] Rango estable є^2/2 Frecuencia de estabilidad [rad] Frecuencia de estabilidad [rpm] 9.7.2 PROCEDIMIENTO RANGO INESTABLE: • Dar un ángulo inicial = 50 • Encender el motor a ¼ de sus revoluciones máximas y disminuir hasta encontrar las dos frecuencias de resonancia. RANGO ESTABLE: • Para β=0 • Dar un ángulo inicial = 1800 • Encender el motor y aproximar a las revoluciones calculadas. 163 Para β=X Dar un ángulo inicial = 180-X Encender el motor a y aproximar a las revoluciones calculadas. 9.7.3 UTILIZACIÓN DE SOFTWARE Para poder utilizar el software es necesario tener los siguientes cálculos: Constantes: 1. Amplitud 2. Frecuencia ω 3. Angulo de excitación β 4. Constante “C” Cálculo del al constante de amortiguamiento De la ecuación de movimiento angular tenemos; ϕ&& + 2hϕ&& + ω 2 0ϕ = 0 (14) Donde; c = 2h (15) I h =ε (16) ω0 Para tener una relación aceptable debemos estar en el siguiente rango 0.01 ≤ ε ≤ 0.05 . Por lo tanto podemos encontrar h: h = εω 0 = 0.01 * 9.26rad / s = 0.0926rad / s Y finalmente podemos hallar el valor de c c = 2hI = 2 * 0.0926rad / s * 1.21X 10 −4 kg * m 2 = 0.0000224 N * m Condiciones Iniciales 1. Angulo inicial 2. Velocidad angular inicial Instrucciones 1. Introducir valores a las constantes del programa 2. En el menú “Simulate” se encuentra el comando “Simulation up” donde se puede el elegir el método de solución y el número pasos en las iteraciones de tiempo. 3. Se da “click” en el icono play 9.8 CONCLUSIONES Esta práctica tiene por objeto mostrar la relación entre los resultaos teóricos y prácticos a través de las ecuaciones paramétricas básicas. Es importante notar que cualquier cambio en los parámetros que definen el péndulo tendrá un resultado importante en su comportamiento al ser sometido a una excitación paramétrica. De la misma manera la comprensión de esta teoría es de utilidad para entender fenómenos más complejos o de mayor dimensión. Como puede ser el estudio de estructuras de 164 edificios, alabes de helicóptero, sistemas sumergidos en fluidos turbulentos, flechas con rigidez periódica entre otros. 9.9 BIBLIOGRAFÍA [1] Bykhouski, Krieger Fundamentals of Vibration Engineering, 1980. [2] S Graham Kelly Fundamentals of Mechanical Vibrations, , Mc Graw Hill Second Edition 2000. [3] Singiresu S. Rod Mechanical Vibrations, Addison Wesley 1995.