- Ninguna Categoria
grúa telescópica autopropulsada documento 3. anexos
Anuncio
eman ta zabal zazu ESCUELA UNIVERSITARIA DE INGENIERÍA TÉCNICA INDUSTRIAL DE BILBAO GRADO EN INGENIERÍA MECÁNICA TRABAJO FIN DE GRADO 2014 / 2015 GRÚA TELESCÓPICA AUTOPROPULSADA DOCUMENTO 3. ANEXOS DATOS DE LA ALUMNA O DEL ALUMNO DATOS DEL DIRECTOR O DE LA NOMBRE: VANESA NOMBRE: ERIK APELLIDOS: BURGOS SÁNCHEZ APELLIDOS: MACHO MIER DIRECTORA DEPARTAMENTO: INGENIERÍA MECÁNICA FDO.: FDO.: FECHA: FECHA: Anexo II (c) 2015 Vanesa Burgos Sánchez GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Índice anexos Anexo 1: Documentación de partida 3.1 Resumen de las dimensiones y características principales de la grúa ................. 10 Anexo 2: Cálculo de la estructura de la grúa 3.2. Clasificación del aparato y determinación de solicitaciones .............................. 10 3.2.1Tipo del servicio del aparato de elevación......................................................... 10 3.2.1.1 Vida del mecanismo....................................................................................... 10 3.2.1.2 Estado de carga .............................................................................................. 11 3.2.2 Clasificación del aparato ................................................................................ 13 3.2.3 Descripción de las solicitaciones ..................................................................... 15 3.2.3.1 Solicitaciones principales .............................................................................. 15 3.2.3.2 Solicitaciones debidas a movimientos verticales ........................................... 15 3.2.3.3 Solicitaciones debidas a movimientos horizontales....................................... 17 3.2.3.4 Solicitaciones debidas a efectos climáticos .................................................. 19 3.2.4 Determinación de solicitaciones .................................................................... 21 3.2.4.1 Aparato en servicio sin viento ....................................................................... 21 3.2.4.2 Aparato en servicio con viento ...................................................................... 22 EUITI BILBAO FEBRERO 2015 Página 1 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.2.4.3 Aparato fuera de servicio con viento máximo ............................................... 22 Anexo 3: Dimensionamiento y diseño de los elementos 3.3 Dimensionamiento de la pluma ...................................................................... .23 3.3.1 En servicio sin viento ........................................................................................ 24 3.3.2 En servicio con viento....................................................................................... 27 3.3.3 Fuera de servicio con viento máximo ............................................................... 29 3.4 Dimensionamiento del sistema de telescopado ................................................... 31 3.4.1 Cilindro telescopado ......................................................................................... 31 3.4.2 Fuerza máxima de compresión ......................................................................... 31 3.4.3 Cálculo del diámetro del vástago ..................................................................... 33 3.4.4 Cálculo de la superficie de empuje del pistón .................................................. 35 3.4.5 Cálculo de la camisa ......................................................................................... 37 3.5 Dimensionamiento del sistema de elevación de la pluma ................................... 39 3.5.1 Cilindro hidráulico ............................................................................................ 39 3.5.2 Cálculo del esfuerzo de compresión del cilindro y diámetro del vástago ....... 40 3.5.3 Calculo del diámetro del pistón ........................................................................ 44 3.5.4 Cálculo de la camisa ........................................................................................ 44 EUITI BILBAO FEBRERO 2015 Página 2 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.6 Dimensionamiento del cabestrante ..................................................................... 45 3.6.1 Selección del cable .......................................................................................... 45 3.6.2 Selección de poleas ........................................................................................ 47 3.6.3 Dimensionado del sistema de polipastos ....................................................... 50 3.6.4 Cálculo del eje de las poleas ............................................................................. 54 3.7 Dimensionamiento de los estabilizadores .......................................................... 59 3.8 Dimensionamiento del sistema de rotación ........................................................ 63 3.8.1 Motor ............................................................................................................... .63 3.8.1.1 Cálculo del par de rozamiento de arranque .................................................. 63 3.8.1.2 Cálculo del par torsor del viento .................................................................. 64 3.8.1.3 Cálculo del momento torsor total ................................................................. 65 3.8.1.4 Cálculo del par de cálculo ............................................................................ 65 3.8.1.5 Cálculo de la potencia del motor .................................................................. 65 3.8.1.6 Selección del motor ...................................................................................... 66 3.8.1.7 Comprobación de la potencia de arranque ................................................... 67 Anexo 4: Dimensionamiento de elementos secundarios 3.9 Bulones ............................................................................................................... 68 EUITI BILBAO FEBRERO 2015 Página 3 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.9.1 Bulones de anclaje del cilindro de elevación .................................................. 69 3.9.2 Bulón de anclaje pluma-estructura .................................................................. 72 3.9.3 Bulones de anclaje del sistema telescopado. ................................................... 76 3.10 Resortes ............................................................................................................ .80 Anexo 5: Selección de elementos por catálogo 3.11 Cilindros hidráulicos de carrera corta .............................................................. 86 3.12 Rodamientos de giro ......................................................................................... 87 3.13 Circlips ............................................................................................................. 89 3.14 Poleas................................................................................................................ 90 3.15 Ganchos ............................................................................................................ 90 3.16 Cojinetes ........................................................................................................... 90 3.17 Elementos de estanqueidad ............................................................................ 93 3.17.1 Sistema telescopado ...................................................................................... 94 3.17.2 Sistema de elevación ..................................................................................... 96 Anexo 6: Hojas de especificaciones del fabricante 3.18 Catálogo de cojinetes GAES ............................................................................ 97 3.19 Rodamientos Rothe Erde, serie K320 ............................................................. 99 EUITI BILBAO FEBRERO 2015 Página 4 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.20 Circlips AASRAA ............................................................................................ 100 3.21 Cables y alambres especiales,S.A .................................................................... 101 3.22 Poleas McKissick ............................................................................................... 102 3.23 Ganchos McKissick ........................................................................................... 103 3.24 Propiedades del material 1100 QL .................................................................. 106 3.25 Propiedades del material 960 QL ..................................................................... 107 3.26 Guía del vástago ............................................................................................... 108 3.27 Guía del pistón.................................................................................................. 110 3.28 Rascador ...................................................................................................... 112 3.29 Junta del pistón ................................................................................................. 113 3.30 Cilindros hidráulicos D.E. brida delantera, CICROSA .................................... 115 3.31 Motores Bonfiglioli .......................................................................................... 116 Índice de figuras Figura 1. Representación de los valores ξ. (Según UNE 58- 102- 74) ...................... 16 Figura 2: Esquema de fuerzas que actúan sobre la pluma en servicio sin viento ...... 24 Figura 3: Esquema de fuerzas que actúan sobre la pluma en servicio con viento ..... .27 Figura 4: Esquema de fuerzas que actúan sobre la pluma fuera de servicio con viento máximo ........................................................................................................... .29 EUITI BILBAO FEBRERO 2015 Página 5 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Figura 5: Longitud de pandeo según la fijación ........................................................ 34 Figura 6: Configuración de la grúa y el cilindro hidráulico ...................................... 39 Figura 7: Gráfica de las fuerzas de compresión ......................................................... .41 Figura 8: Gráfica de los diámetros del vástago.......................................................... 44 Figura 9: Valores del coeficiente h2 para diferentes disposiciones (Según FEM) .... .48 Figura 10: Esquema del recorrido del cable .............................................................. 51 Figura 11: Tambor de elevación (Catálogo de Liebherr) .......................................... 52 Figura 12. Esquema representativo de la disposición de las poleas en la cabeza de la grúa. ................................................................................................................... .54 Figura 13. Ciclo de carga crítico del eje de las poleas ............................................... 56 Figura 14. Factor de acabado superficial Cs .............................................................. .57 Figura 15. Diagrama de soderberg ............................................................................. 58 Figura 16. Disposición de los estabilizadores ............................................................ 60 Figura 17.Diagrama de ciclo de carga del bulón ....................................................... 70 Figura 18.Diagrama de ciclo de carga del bulón ....................................................... 74 Figura 19.Diagrama de ciclo de carga del bulón ....................................................... 77 Figura 21. Cálculo gráfico del factor de arrollamiento (Libro,“Cálculo rápido de muelles y resortes”). .............................................................................................. 83 EUITI BILBAO FEBRERO 2015 Página 6 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Figura 22: Curva de carga límite estática .................................................................. 88 Figura 23. Horas de vida de los cojinetes en función de P·v ..................................... 93 Índice de tablas Tabla 1: Características de la grúa ............................................................................. 10 Tabla 2: Cargas para una longitud de 11m ................................................................ 11 Tabla 3: Cargas para una longitud de 20m ................................................................ 12 Tabla 4: Cargas para una longitud de 29m ................................................................ 12 Tabla 5: Cargas para una longitud de 38m ................................................................ 13 Tabla 6: Definición de la vida del mecanismo (Según FEM).................................... 14 Tabla 7: Definición del estado de carga (Según FEM) .............................................. 14 Tabla 8: Clasificación del aparato (Según FEM)....................................................... 14 Tabla 9: Valores de velocidades y presiones de viento ............................................. 19 Tabla 10: Cálculo coeficiente C................................................................................. 20 Tabla 11: Resumen de cargas .................................................................................... 21 Tabla 12: Valores de M en función del grupo (Según FEM) .................................... 22 Tabla 13: Datos de la grúa ......................................................................................... 23 Tabla 14: Dimensiones de la pluma ........................................................................... 30 EUITI BILBAO FEBRERO 2015 Página 7 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Tabla 15: Valores de la fuerza de compresión según el ángulo de inclinación de la grúa .................................................................................................................... .32 Tabla 16: Gráfica de los valores de la fuerza de compresión según el ángulo de inclinación de la grúa ................................................................................................. 33 Tabla 17: Valor de la eficiencia de la junta ............................................................... 38 Tabla 18: Resumen de dimensiones y fuerzas del cilindro telescópico ..................... 39 Tabla 19: Fuerzas de longitud según ángulo y longitud ............................................ 41 Tabla 20: Diámetros del vástago ............................................................................... 43 Tabla 21: Resumen de dimensiones y fuerzas del cilindro hidráulico ...................... 45 Tabla 22: Rendimiento del aparejo ............................................................................ 46 Tabla 23: Coeficientes Zp (Según FEM) ................................................................... 47 Tabla 24: Valores del coeficiente h1 (según FEM) .................................................... 48 Tabla 25: Resumen de diámetros mínimos (Según FEM) ......................................... 49 Tabla 26. Resumen de las capas de enrollamiento del cable y de la longitud almacenable de este ................................................................................................... 53 Tabla 27. Factor de fiabilidad ................................................................................... 58 Tabla 28: Factor de corrección según el tipo de servicio. ......................................... 66 Tabla 29: Características del muelle .......................................................................... 81 EUITI BILBAO FEBRERO 2015 Página 8 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Tabla 30: Resumen de resultados .............................................................................. 86 EUITI BILBAO FEBRERO 2015 Página 9 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Anexo 1: Documentación de partida 3.1 Resumen de las dimensiones y características principales de la grúa CARACTERÍSTICAS DE LA GRÚA Montaje Sobre camión con ruedas Capacidad de carga máxima 50 T Ángulo de rotación 360º Ángulo máximo de inclinación 82º Longitud de la pluma máximo 38 m Carga crítica 452 kN Longitud crítica 20 m Ángulo de inclinación crítico 80º Perfil de la pluma Rectangular Nº de tramos 4 Peso de la pluma 6T Peso del contrapeso 9T Tabla 1: Características de la grúa Anexo 2: Cálculo de la estructura de la grúa 3.2 Clasificación del aparato y determinación de solicitaciones. Para la clasificación de la grúa y la determinación de sus solicitaciones se ha seguido la norma FEM así como el libro de grúas de Emilio Larrodé. 3.2.1 Tipo del servicio del aparato de elevación. 3.2.1.1 Vida del mecanismo Para realizar los cálculos oportunos es necesario conocer la vida de trabajo de la grúa estudiada, lo cual permitirá clasificar la grúa para poder seguir la normativa correspondiente. EUITI BILBAO FEBRERO 2015 Página 10 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Para la estimación de la vida de la grúa se aproximará la jornada laboral de trabajo a 5 horas diarias, durante una media de 250 días laborables al año. Esta estimación proporciona un resultado de 1250 horas anuales. Tomando una vida del aparato de 10 años impuesta por los fabricantes de la grúa, el cómputo global de de horas de trabajo es de 12500 horas durante la vida de la grúa. 3.2.1.2 Estado de carga Las cargas manipuladas por la grúa son variables, dependiendo de la extensión de la pluma y de la inclinación de la misma. Tabla 2: Cargas para una longitud de 11 m EUITI BILBAO FEBRERO 2015 Página 11 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Tabla 3: Cargas para una longitud de 20 m Tabla 4: Cargas para una longitud de 29 m EUITI BILBAO FEBRERO 2015 Página 12 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Tabla 5: Cargas para una longitud de 38 m En estas tablas se pueden observar el ángulo de inclinación de la pluma, el peso de la carga que puede elevar sin que se produzca el vuelco en función del ángulo y longitud de la pluma y por último el valor del momento que provocaría el vuelco de la grúa. El trabajo más habitual de este tipo de grúas se basa en la manipulación de cargas necesarias para la construcción y equipamientos industriales. El peso de los elementos con los que va a trabajar no suele pasar de las 50 toneladas por lo que la carga máxima admisible tiene una frecuencia reducida de manipulación. 3.2.2 Clasificación del aparato La clasificación de la grúa se basa en la norma FEM, la cual está referida a los aparatos de elevación. En la siguiente tabla se observa cómo clasificar los aparatos en función de las horas de vida de funcionamiento del mismo. En el caso de este estudio, la vida de funcionamiento es de 12500 horas, por lo que observando la tabla podemos clasificar el aparato en el grupo E. EUITI BILBAO FEBRERO 2015 Página 13 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Tabla 6: Definición de la vida del mecanismo (Según FEM) Como se ha determinado en el apartado anterior, la frecuencia de la manipulación máxima de la carga es reducida. Observando la siguiente tabla, se puede deducir el tipo de estado de carga en el que se encuentra esta grúa. Tabla 7: Definición del estado de carga (Según FEM) Para el tipo de trabajo que realiza la grúa, con una frecuencia reducida, se obtiene un estado de carga de nivel 2. Mediante la siguiente tabla se puede conocer la clasificación del aparato en función de los datos obtenidos anteriormente. Tabla 8: Clasificación del aparato (Según FEM) EUITI BILBAO FEBRERO 2015 Página 14 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Por lo tanto, para una vida útil de la grúa de 12500 horas y una frecuencia de carga reducida, se obtiene una clasificación del aparato correspondiente al grupo M6. Esta clasificación permitirá, a la hora de diseñar ciertos componentes, la aplicación de la normativa. 3.2.3 Descripción de las solicitaciones En este apartado se tratará el estudio del tipo de solicitaciones a los que están sometidos los diferentes elementos de la grúa. Dichas solicitaciones actúan de forma diferente en los distintos elementos de la grúa, por lo cual la evaluación de solicitaciones se tratará en el apartado de dimensionamiento de los elementos. 3.2.3.1 Solicitaciones principales. Hay que distinguir entre dos tipos de solicitaciones principales: - Solicitaciones debidas al peso de la carga útil más el peso de los ganchos - Solicitaciones debidas al peso propio de los elementos que componen la grúa. 3.2.3.2 Solicitaciones debidas a movimientos verticales. La norma que hace referencia a este tipo de solicitaciones tiene en cuenta tanto las fuerzas procedentes de la manipulación de la carga de servicio como las fuerzas procedentes de las aceleraciones y desaceleraciones provocadas por las mismas cargas durante su elevación y descenso. - Solicitaciones debidas a la elevación de la carga de servicio. Se obtiene multiplicando la carga de servicio por el coeficiente dinámico, es decir, un factor que tiene en cuenta la manipulación de la carga de servicio. Este factor constituye el choque más importante. El cálculo de este coeficiente se calcula mediante la siguiente expresión: EUITI BILBAO FEBRERO 2015 Página 15 GRÚA TELESCÓPICA AUTOPROPULSADA Ψ 1 3. ANEXOS ε. v Donde: v = velocidad de elevación (m/s) ε = coeficiente experimental. Para grúas 0,3. También se puede obtener el valor de este coeficiente a través de la siguiente gráfica. Figura 1. Representación de los valores . (Según UNE 58- 102- 74) Partiendo de la información de fabricantes de grúas, estos aparatos son capaces de variar la inclinación de la pluma desde 0º a 82º en 47 segundos. Partiendo de estos datos y conociendo el radio de la pluma, en este caso 20 metros, se puede conocer la velocidad de elevación: EUITI BILBAO FEBRERO 2015 Página 16 GRÚA TELESCÓPICA AUTOPROPULSADA L 82° 0° 2π · 47 360 3. ANEXOS 0,03 rad/seg VL= ωL ⋅ R= 0, 03 ⋅ 20= 0,6 m/s Utilizando la grafica anteriormente mencionada, (ver figura 1), se obtiene un coeficiente dinámico de Ψ= 1,18 Puesto que este coeficiente considera una elevación moderadamente brusca de la carga, cosa que constituye el choque más importante, se despreciarán las solicitaciones debidas a la aceleración o deceleración de la carga sobre el movimiento vertical, provocadas por el ascenso o descenso del gancho. 3.2.3.3 Solicitaciones debidas a movimientos horizontales - Efectos horizontales debidos a movimientos de giro Para obtener el valor de la aceleración o deceleración de estos movimientos se debe tener en cuenta la velocidad y el tiempo de aceleración y deceleración. Se calculará la fuerza producida por los cuerpos al acelerarse debido a los movimientos de rotación de la pluma. Se conoce que la velocidad de rotación máxima es aproximadamente 0,9 rpm. Se desea alcanzar esta velocidad en 8 segundos lo que implica una aceleración angular de: α π n 30 ta π 0,9 30 8 0,0011 rad/seg Donde: n= velocidad de rotación α= aceleración angular ta = tiempo de aceleración EUITI BILBAO FEBRERO 2015 Página 17 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Esta aceleración aplicada en el centro de gravedad de la carga y de la pluma respectivamente produce una fuerza horizontal. La aceleración lineal en los centros de gravedad se calculará de la siguiente forma: a α R Para la posición de la pluma inclinada 80º y una longitud de pluma de 20 metros de longitud, su centro de gravedad se encuentra a 0,17 metros de distancia horizontal respecto al eje de giro mientras que la carga se encuentra a 0,35 metros. Las aceleraciones de la pluma y carga serán respectivamente: ap=0,011·0,17=1,87· 10-3 m/s2 ac=0,011·0,35=3,85·10-3 m/s2 Multiplicando las masas de la pluma y la carga por sus respectivas aceleraciones se obtiene la fuerza horizontal producida por estos elementos al acelerarse. Se estima que el peso de la pluma es de 6 toneladas y la carga máxima para la situación más desfavorable es 45,2 kN. Fp= 112,2 N Fc= 1740,2 N - Efectos de la fuerza centrífuga A diferencia de otros aparatos en los cuales se desprecia el efecto de esta fuerza, en las grúas se debe tener en cuenta el esfuerzo horizontal en cabeza de flecha que se obtiene mediante la inclinación del cable que porta la carga. EUITI BILBAO FEBRERO 2015 Página 18 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.2.3.4 Solicitaciones debidas a efectos climáticos - Solicitaciones debidas al viento. La velocidad del viento varía en función de donde esté situada la grúa, es decir, de la altura y el tipo de terreno que haya en el lugar donde se produzca el contacto del viento con la superficie de la tierra, el cual provoca un efecto de arrastre parecido al de rozamiento. Teniendo en cuenta que la grúa estudiada se encontrará entre una altura de 0 a 20 metros, de la gráfica siguiente obtenemos las velocidades y presiones. Tabla 9: Valores de velocidades y presiones de viento Se estudiarán dos casos, el primero será aquel correspondiente al viento en la carga y el segundo a la pluma. 1) Viento en la carga Fvc P A C Donde: P= 0,25 kN/m2 A= 30 m2 C=1 (se calcula teniendo en cuenta la mayor superficie y valor de coeficiente aerodinámico) EUITI BILBAO FEBRERO 2015 Página 19 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Fvc= 7,5 kN 2) Viento en la pluma Tendremos en cuenta dos casos. Uno de ellos en viento normal y otra para viento máximo. Viento normal Fvp=P·A·C Fvp=8,4 kN Viento máximo Fvmax=P·A·C P=0,8 kN/m2 Fvmax=26,88 kN Tabla 10: Cálculo coeficiente C EUITI BILBAO FEBRERO 2015 Página 20 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS - Solicitaciones debidas a la nieve La normativa no tiene en cuenta posibles sobrecargas de nieve en el cálculo de grúas o puentes grúa. Solicitaciones Movimientos Movimientos Clima principales verticales horizontales Ψ Fin PP Carga Viento (N) (N) Pluma 60000 X 1,18 112,2 8400 26880 Carga X 452000 1,18 1740,2 7500 X (N) Viento Máximo Tabla 11: Resumen de cargas 3.2.4 Determinación de solicitaciones Para el estudio de solicitaciones se ha de calcular para tres estados diferentes. 3.2.4.1 Aparato en servicio sin viento Debido al tipo de grúa que trabaja en espacios abiertos, este tipo de estudio no es aplicable ya que siempre trabaja en entornos en los que le afecta el viento. Para este caso, el valor de la solicitación es el siguiente: [M (SG + ΨSL + SH)] · CS Siendo: CS= coeficiente de seguridad = 1,5 M= coeficiente variable según al grupo al que pertenece la grúa Ψ= coeficiente dinámico SG= peso propio EUITI BILBAO FEBRERO 2015 Página 21 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS SL= cargas verticales (kN) SH= fuerzas de aceleración horizontales de carga (kN) SW= fuerza del viento en servicio (kN) Tabla 12: Valores de M en función del grupo (Según FEM) El grupo de esta grúa, como ha sido calculado con anterioridad, es el M6, por lo tanto el coeficiente M es de 1,06. 3.2.4.2 Aparato en servicio con viento La solicitación en este caso toma la siguiente expresión: [M (SG + ΨSL + SH) + SW] · CS Siendo: CS= 1,33 M= está representado en la tabla anterior. 3.2.4.3 Aparato fuera de servicio con viento máximo (SG + SWmax) · CS Siendo: SWmax= fuerza de viento máximo CS= 1,1 EUITI BILBAO FEBRERO 2015 Página 22 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Todo el cálculo se realiza mediante una tabla de Excel que se explicará en el siguiente apartado, dimensionamiento de la pluma. Anexo 3: Dimensionamiento y diseño de los elementos 3.3 Dimensionamiento de la pluma El dimensionado de la pluma se realizará mediante una tabla de Excel. Se realizarán las siguientes simplificaciones para facilitar este primer estudio: 1. Pluma formada por un solo tramo, en lugar de 4 tramos de diferentes secciones. 2. Anclaje de la pluma empotrado en un único punto, en lugar de anclaje en dos puntos mediante articulaciones. La situación más peligrosa es aquella en que la longitud es de 20 metros, un ángulo de inclinación de 80º y para una carga de 452 kN. Partiendo de los siguientes datos tenemos que estudiar tres casos según el viento que tengamos en cuenta. Tabla 13: Datos de la grúa EUITI BILBAO FEBRERO 2015 Página 23 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.3.1 En servicio sin viento Figura 2: Esquema de fuerzas que actúan sobre la pluma en servicio sin viento Tendremos que estudiar los diferentes puntos de la sección para ver cual es más desfavorable, la cual es la sección B como se puede observar más adelante, ya que su tensión equivalente es la mayor. Punto AÆ σmp(trac)-σp(comp) Æ σmc(trac)-σc(comp) Æ τvfin Punto BÆ σmp(comp)+σp(comp) Æ σmc(comp)+σc(comp) Æ τvfin EUITI BILBAO FEBRERO 2015 Página 24 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Punto CÆ σmfin(tracc) Æ τvp Æ τvc Punto DÆ σmfin(comp) Æ τvp Æ τvc Las fórmulas generales empleadas para la resolución son las siguientes: S M y I σ S σ P A T τ P A Donde: Sm=σm= Tensión debida al momento flector S=σ= Tensión debida a la carga T=τ= Tensión debida al torsor M= Momento flector P=carga o fuerza ymax= distancia desde la línea neutra hasta la fibra mas traccionada o comprimida I= momento de inercia, según las cargas que actúen será respecto del eje X o del eje Y A= área Con las formulas explicadas y haciendo uso de las empleadas en las combinaciones (véase apartado 3.2.4) y mediante el siguiente Excel obtenemos los siguientes resultados: EUITI BILBAO FEBRERO 2015 Página 25 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS A efectos de cálculo el punto C y D dan los mismos resultados por lo que solo calculamos uno de ellos. La tensión total equivalente para el caso en servicio sin viento es de 1076<1100 MPa que es la tensión máxima admisible, por lo que valdría. EUITI BILBAO FEBRERO 2015 Página 26 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.3.2 En servicio con viento Figura 3: Esquema de fuerzas que actúan sobre la pluma en servicio con viento Punto AÆ σmp(trac)-σp(comp) Æ σmc(trac)-σc(comp) Æ τvfin Æ τvvp Æ τvvc Punto BÆ σmp(comp)+σp(comp) Æ σmc(comp)+σc(comp) Æ τvfin Æ τvvp Æ τvvc Punto CÆ σmfin(tracc) Æ σmfvc(tracc) Æ σmfvp(tracc) Æ τvp Æ τvc EUITI BILBAO FEBRERO 2015 Página 27 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Punto DÆ σmfin(comp) Æ σmfvc(comp) Æ σmfvp(comp) Æ τvp Æ τvc A efectos de cálculo el punto C y D dan los mismos resultados por lo que solo calculamos uno de ellos. La tensión total equivalente para el caso en servicio con viento es de 954<1100 Mpa que es la tensión máxima admisible, por lo que valdría. EUITI BILBAO FEBRERO 2015 Página 28 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.3.3 Fuera de servicio con viento máximo Figura 4: Esquema de fuerzas que actúan sobre la pluma fuera de servicio con viento máximo Punto AÆ σmp(trac)-σp(comp) Æ τvfmax Punto BÆ σmp(comp)+σp(comp) Æ τvfmax Punto CÆ σmvmax(tracc) Æ τvp Punto DÆ σmvmax(comp) Æ τvp A efectos de cálculo el punto C y D dan los mismos resultados por lo que solo calculamos uno de ellos. EUITI BILBAO FEBRERO 2015 Página 29 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS La tensión total equivalente para el caso fuera de servicio con viento máximo es de 35<1100 Mpa que es la tensión máxima admisible, por lo que valdría De este estudio obtenemos el dimensionamiento final de la pluma. Tabla 14: Dimensiones de la pluma EUITI BILBAO FEBRERO 2015 Página 30 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.4 Dimensionamiento del sistema de telescopado 3.4.1 Cilindro telescopado La función de este cilindro hidráulico es el telescopado de la pluma descargada, ya que la carga se elevará una vez la pluma haya sido extendida a la longitud deseada. Por lo tanto, deberá ser capaz de desplazar los tramos telescopables, teniendo que soportar la fuerza producida por el peso de estos y la producida por el rozamiento entre los tramos y patines. 3.4.2 Fuerza máxima de compresión El cilindro soportará una fuerza de compresión formada por una componente tangencial del peso, Pp, de los tramos a telescopar más la componente radial de éste multiplicada por el coeficiente de rozamiento μ entre el segundo tramo y los patines. Froz= μ · N= μ · Pp · cos α Fcomp= Pp (sen α + μ · cos α) Donde: Fcomp: fuerza de compresión máxima Pp: peso de la pluma = 3 T (Cada tramo pesa aproximadamente 1 T) μ: coeficiente de rozamiento = 0,35 (catalogo) α: angulo de inclinación de la pluma respecto del suelo En la siguiente tabla se observa que situación da una fuerza de compresión mayor y por tanto será la situación más desfavorable. EUITI BILBAO FEBRERO 2015 Página 31 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS F comp α F comp α 1,05 0 2,78 42 1,154 2 2,83 44 1,26 4 2,88 46 1,36 6 2,93 48 1,46 8 2,97 50 1,55 10 3 52 1,65 12 3,04 54 1,74 14 3,07 56 1,84 16 3,1 58 1,93 18 3,12 60 2,01 20 3,14 62 2,09 22 3,15 64 2,18 24 3.16 66 2,26 26 3,174 68 2,33 28 3,18 70 2,4 30 3,177 72 2,48 32 3,173 74 2,54 34 3,16 76 2,61 36 3,15 78 2,67 38 3,14 80 2,73 40 3,12 82 Tabla 15: Valores de la fuerza de compresión según el angulo de inclinación de la grúa EUITI BILBAO FEBRERO 2015 Página 32 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Fuerza compresión 3,5 3 2,5 2 Fuerza compresión 1,5 1 0,5 0 0 4 8 12 16 20 24 28 32 36 40 44 48 52 56 60 64 68 72 76 80 Tabla 16: Gráfica de los valores de la fuerza de compresión según el angulo de inclinación de la grúa Por tanto la peor situación es para un ángulo de 70º dando como resultado una fuerza de compresión de: Fcomp= Pp (sen α + μ · cos α)= 3,18 T 3.4.3 Cálculo del diámetro del vástago Una vez obtenida la fuerza a compresión que deberá vencer el cilindro, se calculará el diámetro mínimo que éste deberá tener para evitar el pandeo. El pandeo es un fenómeno de inestabilidad elástica que puede darse en elementos comprimidos esbeltos, y que se manifiesta por la aparición de desplazamientos importantes transversales a la dirección principal de compresión. Se traduce en la aparición de una flexión adicional cuando se halla sometido a la acción de esfuerzos axiales de cierta importancia. La aparición de deflexión por pandeo limita severamente la resistencia en compresión. A partir de cierto valor de la carga axial de compresión, denominada carga crítica de pandeo, puede producirse una situación de inestabilidad elástica y entonces fácilmente la deformación aumentará produciendo tensiones adicionales que superarán la tensión de rotura, provocando el colapso del elemento estructural. EUITI BILBAO FEBRERO 2015 Página 33 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Para el cálculo del diámetro mínimo necesario para que no se produzca el pandeo se utilizará la ecuación de Euler. Fp=Fcomp= π2 ·E·I Lp2 Donde: Fp: Fuerza en N a la que se produce pandeo E: Módulo de elasticidad del acero E = 2,1 · 1011 N/m2 I: Momento de inercia en m4. Para secciones transversales circulares: πd4 I= 64 Donde: d: diámetro del vástago en m. Lp: longitud libre al pandeo en m. Depende del tipo de fijación que lleve el cilindro. Su valor se indica en la tabla siguiente: Figura 5: Longitud de pandeo según la fijación EUITI BILBAO FEBRERO 2015 Página 34 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS El cilindro hidráulico estará empotrado por la parte del vástago y quedará libre por la parte de la camisa, por lo tanto, según la tabla anterior, Lp=2·L Se sustituye en la ecuación de euler el momento de inercia para dejarla en función del diámetro, y la longitud de pandeo se substituye por el valor correspondiente en la figura 5. Se aplica a la fuerza de pandeo un factor de seguridad de 3,5 según normativa DIN 24-13. En la fórmula resultante se despeja el diámetro, quedando pues de la siguiente forma: 64 3,5 3,18 10 2 18 π 2,1 10 d 190 mm El vástago del cilindro deberá tener un diámetro mínimo de 190 mm para resistir el pandeo. 3.4.4 Cálculo de la superficie de empuje del pistón Para el cálculo de la superficie de empuje del pistón se estima una presión nominal de trabajo del cilindro hidráulico de 200 bar. Para conocer la superficie mínima del pistón para ser capaz de desplazar el vástago venciendo así la fuerza de compresión se partirá de la fórmula de la presión. P F S Donde: P=200·105 Pa F=3,18·104 N, Según resultado obtenido en el cálculo del apartado 3.4.2 Los cilindros hidráulicos son componentes que transforman energía neumática en movimiento rectilíneo. Tenemos dos tipos de cilindros, los de efecto simple y los de efecto doble. EUITI BILBAO FEBRERO 2015 Página 35 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Los de efecto simple constan de una entrada de presión y un muelle. Primero el agua entra y desplaza el pistón comprimiendo el muelle, seguidamente el aire retrocede y el muelle recupera así su estado inicial. Los de doble efecto tienen dos entradas de presión separadas por el pistón. El agua entra por el lado izquierdo lo cual mueve el pistón y es expulsado por el lado derecho, y así sucesivamente. Éstos presentan una serie de ventajas respecto a los de efecto simple, dado que son capaces de trabajar en ambos sentidos y no pierden fuerza en presionar un muelle. Además de eso aprovechan toda la longitud del cilindro dado que los de efecto simple pierden el espacio que ocupa el muelle comprimido. Por otro lado una de las desventajas de este tipo de cilindro es que consume el doble de agua. Tras ver los beneficios de los cilindros de doble efecto se ha decidido trabajar con uno de ellos. Tratándose de un cilindro hidráulico de doble efecto, se calculará el diámetro del pistón en base a la superficie de retroceso. Conociendo el diámetro interior del pistón que coincide con el diámetro del vástago, d=190 mm. Expresando la superficie en la fórmula anterior en función de los diámetros interior y exterior y aislando el exterior, se obtiene la siguiente expresión: D d 4 F π P 0,19 4 3,18 10 π 200 10 195 mm Por razones de montaje se utilizará un diámetro exterior del pistón de 230 mm, debido a que le dará mayor robustez al sistema, puesto que el diámetro mínimo del pistón es prácticamente el mismo que el del vástago, de esta forma se trabaja del lado de la seguridad. EUITI BILBAO FEBRERO 2015 Página 36 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.4.5 Cálculo de la camisa Término usado para indicar la envolvente interna del cilindro. En la práctica se denomina camisa a la superficie interna del cilindro, por la que se desliza el pistón en su movimiento rectilíneo alternativo Para dimensionar el espesor de la camisa se utilizará la siguiente fórmula de cálculo de depósitos a presión interna, según libro Pressure Vessel Handbook, de E. Megyesy. t= P·R S·E+0,4·P Donde: t: espesor de la camisa P: presión máxima de trabajo, multiplicado por un factor de seguridad S: tensión admisible del material, para el material seleccionado, Acero F-112 según UNE, la tensión admisible es σ=650 MPa E: eficiencia de la junta, según la tabla de la siguiente figura. EUITI BILBAO FEBRERO 2015 Página 37 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Tabla 17: Valor de la eficiencia de la junta t 300 10 650 10 0,8 2 0,115 0,4 300 10 12 mm La camisa se dimensionará por lo tanto con un espesor de 15 mm. Por cuestiones de proveedores del material para la fabricación de la camisa, esta tendrá un diámetro interior de 230 mm y un diámetro exterior de 260 mm. EUITI BILBAO FEBRERO 2015 Página 38 GRÚA TELESCÓPICA AUTOPROPULSADA Presión de Presión Fuerza de Diámetro 3. ANEXOS Diámetro Diámetro Diámetro trabajo máxima de compresión del vástago del pistón interior de exterior de (bar) trabajo máxima (bar) (Tm) 300 3,18 200 (mm) 190 (mm) 230 la camisa la camisa (mm) (mm) 230 260 Tabla 18: Resumen de dimensiones y fuerzas del cilindro telescópico 3.5 Dimensionamiento del sistema de elevación de la pluma 3.5.1 Cilindro hidráulico La función de este cilindro hidráulico es permitir la elevación de la pluma desde 0º que es la posición horizontal hasta una inclinación máxima de 82º respecto a la horizontal. Por lo tanto, deberá ser capaz de vencer la fuerza a compresión provocada por el peso propio de la pluma y la carga manipulada para toda inclinación de esta y carga con la que trabaje Figura 6: Configuración de la grúa y el cilindro hidráulico Para obtener la fuerza de compresión a la que estará sometida el cilindro hidráulico se parte de la situación de la figura. EUITI BILBAO FEBRERO 2015 Página 39 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Donde: A: punto de anclaje de la pluma de la estructura B: punto de unión entre la pluma y el cilindro hidráulico C: punto de aplicación de la carga a manipular D: punto de anclaje del cilindro hidráulico con la estructura. Lp: longitud de la pluma dy: distancia vertical entre el anclaje de la pluma a la estructura y el anclaje entre el cilindro hidráulico y la estructura. 1250 mm dx: distancia horizontal entre el anclaje de la pluma a la estructura y el anclaje entre el cilindro hidráulico y la estructura. 2000 mm β: inclinación de la pluma α: inclinación del cilindro hidráulico 3.5.2 Cálculo del esfuerzo de compresión del cilindro y diámetro del vástago Para calcular la fuerza de compresión del cilindro se utilizará una hoja de cálculo. Puesto que no se conoce para que inclinación y longitud de la grúa la solicitación del cilindro será mayor, se realizará el cálculo de la fuerza de compresión para las posibles inclinaciones de la pluma entre 0 y 80º con intervalos de 20º y para las cuatro longitudes posibles, 11, 20, 29, 38 m. Para conocer la carga a manipular en cada inclinación ver tablas apartado 3.2.1.2. Se calcula la fuerza de compresión para los diferentes ángulos y longitudes ya citados y se obtiene la siguiente grafica, de donde se deduce que la peor fuerza de compresión es para una longitud de 20 m y un ángulo de 80º. EUITI BILBAO FEBRERO 2015 Página 40 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Tabla 19: Fuerzas de longitud según angulo y longitud Figura 7: Gráfica de las fuerzas de compresión La hoja de cálculo utilizada para el cálculo de la fuerza de compresión también calculará la longitud del cilindro hidráulico y el diámetro mínimo del vástago para resistir el pandeo. De la figura 6 se obtienen las siguientes fórmulas: ∑Ma 0 Pp cosβ Lp 2 Pc cosβ Lp EUITI BILBAO FEBRERO 2015 Fc cosα senβ AB Fc senα cosβ AB Página 41 GRÚA TELESCÓPICA AUTOPROPULSADA 90 β γ β 32 α 180 γ α 148 α 3. ANEXOS h γ dx dy 32 α 90 180 58 sen 32 h′ ′ β AB AB sen 32 AB sen 32 β sen 148 β h′ L sen 148 α L sen 148 ′ L α α EUITI BILBAO FEBRERO 2015 Página 42 GRÚA TELESCÓPICA AUTOPROPULSADA cos 32 cos 148 L β AB α x h 3. ANEXOS x L h x cos 148 α Se calcula la fuerza de compresión, la longitud del cilindro y el diámetro del vástago con la hoja de cálculo ya citada y para una longitud de la pluma de 20 m y un angulo de inclinación de 80º. La fuerza de compresión que debe soportar es de 93 T, la longitud del cilindro será de 7,22 m y el diámetro del vástago será de 0,2 m. Tabla 20: Diámetros del vástago EUITI BILBAO FEBRERO 2015 Página 43 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Figura 8: Gráfica de los diámetros del vástago 3.5.3 Calculo del diámetro del pistón El diámetro mínimo del pistón se calculará de forma similar a la del pistón para el sistema de telescopado (apartado3.4.4), mediante la fórmula: d 4 F π P Para una presión nominal de uso de 300 bar y una fuerza máxima de compresión de 93 T, se obtiene un diámetro de 0,25 metros 3.5.4 Cálculo de la camisa De la misma manera que se dimensionó la camisa del sistema de telescopado ver apartado 3.4.5, se utilizará la misma ecuación para calcular el espesor mínimo de la camisa. t= P·R S·E+0,4·P En este caso la presión máxima será de 380 bar, con lo cual se obtiene un espesor de la camisa de 170 mm. EUITI BILBAO FEBRERO 2015 Página 44 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Por cuestiones de proveedores del material para la fabricación de la camisa, esta tendrá un diámetro interior de 250 mm y un diámetro exterior de 298 mm. Presión de Presión Fuerza de Diámetro Diámetro Diámetro Diámetro trabajo máxima de compresión del vástago del pistón interior de exterior de (bar) trabajo máxima (bar) (Tm) 380 93 300 (mm) 200 (mm) 250 la camisa la camisa (mm) (mm) 250 298 Tabla 21: Resumen de dimensiones y fuerzas del cilindro hidráulico 3.6 Dimensionamiento del cabestrante Par el dimensionamiento del cabestrante se selecciona el torno de cable KSW400 de Liebherr, puesto que sus medidas y prestaciones son las que más se amoldan al diseño. Éste es capaz de soportar un tiro del cable de 105 kN. Puesto que la carga máxima de la grúa es de 50 T, será necesario diseñar un sistema de poleas para poder levantar esta carga. El sistema de poleas deberá contar como mínimo con 4 poleas para reducir la tensión del cable de 500 kN a 100 kN, los que puede soportar el torno. 3.6.1 Selección del cable Se seleccionará el cable según la norma FEM. En el estudio de esta grúa se optará por utilizar dos cables a lo largo de la vida útil de la misma, por lo tanto, la vida útil del cable será de 6250 horas. Según la tabla 1, indicada anteriormente, para una vida útil de 6300 horas y una frecuencia reducida de la carga máxima, se utilizará una clasificación del grupo del mecanismo M5. Véase apartado 3.2.2 A continuación, se debe calcular la tracción máxima a la que estará sometido el cable, utilizando la ecuación siguiente (según FEM): EUITI BILBAO FEBRERO 2015 Página 45 GRÚA TELESCÓPICA AUTOPROPULSADA S Q 3. ANEXOS Q i·η Donde: Qu: Carga máxima nominal del aparato Qes: Peso propio del aparejo o elemento de suspensión de la carga. i:Relación del aparejo η:Rendimiento del aparejo. Ver tabla 25 Nº ramales 2 η 0,99 Poleas 3 4 5 6 7 8 9 10 0,98 0,97 0,96 0,95 0,94 0,93 0,92 0,91 con rendimie nto Tabla 22: Rendimiento del aparejo Para la grúa a dimensionar, la carga a manipular ya tiene en cuenta el peso del gancho y demás componentes. La tracción máxima del cable será, por tanto: S 50 · 10 8 · 0,96 67204 N El diámetro mínimo del cable se calcula de la siguiente manera: Zp F S Donde: Zp: Factor de seguridad, según la tabla 26 Fo: Carga de rotura del cable EUITI BILBAO FEBRERO 2015 Página 46 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Grupo Seguridad mínima Zp M3 3,55 M4 4 M5 4,5 M6 5,6 M7 7,1 M8 9 Tabla23:Coeficientes Zp (Según FEM) Sustituyendo valores se obtiene una carga de rotura mínima del cable de: Fo Zp · S 4,5 · 67204 302 kN Se seleccionará por catálogo un cable DOPAR de 9CT, de 18 mm de diámetro, cuya resistencia a la tracción es de 325 kN, superior a la necesaria. Ver anexo 3.21 3.6.2 Selección de poleas El diámetro mínimo de una polea se determina mediante la siguiente expresión: Dmin d ·h ·h Donde: d1: diámetro del cable h1: coeficiente de mayoración en función del grupo de clasificación del mecanismo h2: coeficiente de mayoración en función del montaje del polipasto Los coeficientes h1 y h2 se pueden encontrar a continuación: EUITI BILBAO FEBRERO 2015 Página 47 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Grupo Polea de cable Polea compensadora Tambor M3 16 12,5 16 M4 18 14 16 M5 20 14 18 M6 22,4 16 20 M7 25 16 22,4 M8 28 18 25 Tabla 24: Valores del coeficiente h1 (según FEM) Figura 9: Valores del coeficiente h2 para diferentes disposiciones (Según FEM) EUITI BILBAO FEBRERO 2015 Página 48 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Para una clasificación M5 y aplicando los coeficientes de mayoración en la ecuación anterior, se obtienen los siguientes diámetros de poleas y tambores: Polea de cable: Dmin 18 · 20 · 1,25 450 mm Polea de compensación: Dmin 18 · 14 · 1,25 315 mm 18 · 18 · 1,25 405 mm Tambor: Dmin Diámetro mínimo Polea del cable (mm) Polea de compensación (mm) Tambor (mm) 450 315 405 Tabla 25: Resumen de diámetros mínimos (Según FEM) A partir de estos diámetros se seleccionarán las poleas. Puesto que el tambor ya había sido previamente seleccionado, se comprobará que este cumpla con la normativa. El diámetro del tambor del torno de cable KSW 400 de Liebherr tiene un diámetro de 490 mm, siendo mayor que el diámetro mínimo, 405 mm, por lo tanto se considera correcta la elección del tambor. La selección de las poleas se realizará en función del diámetro mínimo obtenido y del diámetro del eje, calculado más adelante. EUITI BILBAO FEBRERO 2015 Página 49 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.6.3 Dimensionado del sistema de polipastos Un aparejo, polipasto o polispasto es una máquina compuesta por dos o más poleas y una cuerda, cable o cadena que alternativamente va pasando por las diversas gargantas de cada una de aquellas. Se utiliza para levantar o mover una carga con una gran ventaja mecánica, porque se necesita aplicar una fuerza mucho menor que el peso que hay que mover. A la hora de diseñar el sistema de polipasto existen diversos factores que se deben tener en cuenta: - Tiro máximo del tambor - Carga máxima a manipular - Número de poleas necesarias para reducir la tensión del cable - Cantidad de cable que puede ser almacenado por el tambor. - Longitud e inclinación de la pluma - Diámetro de las poleas - Recorrido del cable La longitud de cable vendrá determinada por el recorrido que este debe realizar; pasando desde el tambor hasta la polea de compensación situada en la cabeza de la pluma y desde aquí, bajando hasta el gancho y realizando los reenvíos necesarios. En la siguiente figura se puede observar un esquema de este recorrido. EUITI BILBAO FEBRERO 2015 Página 50 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Figura 10: Esquema del recorrido del cable Donde: Lp: longitud de pluma. d1: distancia entre la polea compensadora y el eje de las poleas d2:distancia máxima vertical entre la polea y el gancho. d3:distancia vertical entre el suelo y el tambor. Para calcular el recorrido máximo que debe realizar el cable, se parte de una situación de inclinación de la pluma a 82º y el gancho situado a nivel del suelo. Los datos son los siguientes: Lp=38 m d1=0,8 m d3=3 m d L · sen α d d 39,8 m Numero de poleas: 4 EUITI BILBAO FEBRERO 2015 Página 51 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Diámetro del cable: d= 0,45 m α=82º El recorrido máximo del cable será: L L d d ·n n ·π·d 2 362,2 m Se calcula el máximo de cable que puede almacenar el tambor. Las dimensiones necesarias para este cálculo se pueden ver en la siguiente figura: Dimensiones en mm Figura 11: Tambor de elevación (Catálogo de Liebherr) Conociendo el diámetro del cable, de 18 mm y las dimensiones del tambor, se calculará el número de espiras de cable que caben en cada capa del tambor. n 821 18 45 espiras EUITI BILBAO FEBRERO 2015 Página 52 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Se multiplicará este número de espiras por el perímetro de cable que se puede almacenar en la primera capa. Este perímetro se calculará a partir de la distancia del eje neutro del cable al centro del tambor. Es decir, sumando al diámetro del tambor el diámetro del cable. P π D L d P·n Se calculará la longitud de cable almacenable en las siguientes capas, teniendo en cuenta que el diámetro de enrollamiento habrá aumentado debido al espesor del cable ya enrollado. Los resultados del cálculo se expresan en la siguiente tabla: Capa D enrollamiento Perímetro Longitud cable 1 0,508 1,59 71,8 2 0,544 1,7 76,9 3 0,58 1,8 81,9 4 0,616 1,9 87 5 0,652 2 92,1 409,7 m Tabla 26. Resumen de las capas de enrollamiento del cable y de la longitud almacenable de este Se obtiene una longitud del cable almacenable de 409,7 metros. Únicamente se pueden almacenar 5 capas de cable debido a que al enrollar una sexta capa, el diámetro de enrollamiento de esta superaría al diámetro máximo del tambor. Como observamos la longitud de cable que puede almacenar es de 409,7 m superior a la longitud que tenemos de cable que son 362,2 m. EUITI BILBAO FEBRERO 2015 Página 53 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.6.4 Cálculo del eje de las poleas El eje de la cabeza de la grúa, donde están alojadas las 4 poleas, deberá resistir la flexión producida por la tensión del cable al manipular una carga. Se dimensionará el eje para que este pueda resistir la situación crítica, cuando se manipule una carga de 50 T. Para realizar este cálculo, se parte de la disposición de poleas de la siguiente figura: Figura 12. Esquema representativo de la disposición de las poleas en la cabeza de la grúa. Donde: s: separación entre poleas, 20 mm e: espesor de la polea, 60 mm b: distancia entre la primera polea y la cabeza de la pluma, 70 mm L: longitud del eje, 520 mm Q: 50 T Se calcularán las reacciones en los apoyos del eje: ΣFv 0 R R Q EUITI BILBAO FEBRERO 2015 Página 54 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Puesto que las poleas están centradas, R1=R2, por lo tanto: R R 25 T La sección crítica se encontrará en el centro del eje, debido a que aquí es donde existirá un mayor momento flector, que quedará definido por la siguiente expresión: M R · L 2 Q L 4 2 b e 2 Q L 4 2 b 3e 2 S Sustituyendo valores: Mmax=10.000 Tmm=100.000 Nm La tensión máxima soportada por el eje a flexión vendrá dada por la siguiente expresión: Se calculará la tensión máxima que soportará el eje en la sección estudiada: σmax 32·Mmax π·d3 Con los valores obtenidos: σmax 1,01859 MPa d3 Al no conocer el diámetro de este eje, σmax quedará en función de éste. Este eje se dimensionará a fatiga. Estará sometido a un ciclo de carga pulsatorio, variando desde la posición de reposo a la flexión máxima: EUITI BILBAO FEBRERO 2015 Página 55 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Figura 13. Ciclo de carga crítico del eje de las poleas Se obtienen las tensiones σ media y σ alterna, siendo: σm = σr = σmax + σmin 2 σmax - σmin 2 Sustituyendo valores se obtiene: σm =σr = 0,5093 d3 MPa Se calculará la tensión máxima admisible del material para una vida infinita: El bulón estará construido en acero F-126. Este tipo de material ofrece las siguientes características mecánicas: EUITI BILBAO FEBRERO 2015 Página 56 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS σu=1200 MPa σyp= 1000 MPa La tensión máxima admisible del material quedará definida por la siguiente expresión: σe =Ce ·σ'e Donde: Para una σu=1200<1400 MPa→σ’e=0,5·σu=600 MPa Ce: coeficientes modificativos del límite de fatiga Cs: coeficiente de acabado superficial. Para un acabado superficial de mecanizado, σu=1200 MPa se obtiene un Cs=0,7 Figura 14. Factor de acabado superficial Cs EUITI BILBAO FEBRERO 2015 Página 57 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Cd= coeficiente de dimensiones y geometría, piezas pequeñas/medianas/grandes:Cd:1/0,90,8/0,8-0,7 Cd=0,75 por tratarse de una pieza de gran tamaño. Ct=coeficiente de forma de trabajo. Flexión/carga axial/flexión+torsión/otros: 1/0,7-0,9/0,85/0,5-0,7. Al tratarse de una pieza sometida a flexión se considera que Ct=1 Cf= coeficiente de fiabilidad. Se impondrá una fiabilidad del 99% Cf=1-0,08·z= 0,809 Tabla 27. Factor de fiabilidad La tensión máxima admisible del material a fatiga para una vida infinita será pues: σe= 600·0,7·1·0,75·0,809=255 MPa Se utilizará el diagrama de Soderberg para determinar la zona segura de trabajo a fatiga del bulón. A continuación se puede observar el diagrama de soderberg: Figura 15. Diagrama de soderberg EUITI BILBAO FEBRERO 2015 Página 58 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Se utilizará el diagrama para comparar las solicitaciones de la pieza con la resistencia del material. La región contenida dentro de la recta roja representa la zona segura de trabajo a fatiga del bulón. Se calculará el valor de σeqm, e imponiendo un factor de seguridad de 1,25, se calculará el diámetro: σr σm 1 + = σe σyp CS 0,5093 0,5093 d3 + d3 = 1 255 1000 1,25 El diámetro del eje será de 150 mm 3.7 Dimensionamiento de los estabilizadores Es muy importante la comprobación de la estabilidad de la grúa puesto que existe la posibilidad de que los puntos de apoyo lleguen a levantarse, dando lugar al vuelco de la grúa. La posición de los estabilizadores respecto del camión y el eje de rotación es la siguiente: EUITI BILBAO FEBRERO 2015 Página 59 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Figura 16. Disposición de los estabilizadores Donde: d1= 7151 mm dt=6400 mm X0=950,5 mm A continuación se procederá al cálculo de la estabilidad de la grúa. Deberán tenerse en cuenta todas las posibles orientaciones, longitudes e inclinaciones de la pluma Hay que tener en cuenta si son operaciones laterales o traseras. - Operaciones traseras P V 4 M 2 d EUITI BILBAO FEBRERO 2015 Página 60 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS - Operaciones delanteras P= V Mnt 4 2·d1 - Operaciones laterales Pdp =Ptp = Pdc Ptc V Mnl Sgc ·dgc +Vu ·Xo + + 4 2·dt 2·d1 V Mnl ‐ 4 2·dt Sgc ·dgc Vu ·Xo 2·d1 Mnt Mu ‐Vu ·X0 ‐SGC ·dGC Mnl Mu Mu Mp Sl ·R‐Su ·du V Vu SGC Vu Sp Sl Su Donde: Xo=distancia entre el eje de rotación y el centroide de estabilidad SGC=peso del vehículo dGC=distancia del CDG al centroide Su=peso estructura superior sin tener en cuenta el peso de la pluma du=distancia del CDG al eje de rotación EUITI BILBAO FEBRERO 2015 Página 61 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS R=distancia del eje de rotación a la carga SL=carga de elevación Sp=peso de la pluma Pdp= reacción del estabilizador delantero del lado de la pluma Pdc= reacción del estabilizador delantero del lado de la contrapluma Ptp= reacción del estabilizador trasero del lado de la pluma Ptc= reacción del estabilizador trasero del lado de la contrapluma Mnt= momento neto alrededor del centroide V=carga vertical Para que la grúa no vuelque las reacciones de los estabilizadores tienen que ser positivas, en caso contrario la grúa volcaría. En el siguiente Excel se observa que para el peor caso ya mencionado de una carga de 452 kN una longitud de pluma de 20 m y un angulo de 80º las reacciones son todas positivas por lo que la grúa no vuelca. EUITI BILBAO FEBRERO 2015 Página 62 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.8 Dimensionamiento del sistema de rotación 3.8.1 Motor Para la elección del tipo del motor se ha optado por un motor asíncrono trifásico. Esta elección se debe a que este tipo de motor es el más utilizado en la industria, debido a su robustez y sencillez de funcionamiento. 3.8.1.1 Cálculo del par de rozamiento de arranque El cálculo del par de rozamiento de arranque se realizara con la ecuación sugerida por en el catálogo del fabricante del rodamiento para uniones giratorias de bolas. Mr µ 4,4·Mk Fa ·DL 2 EUITI BILBAO FEBRERO 2015 Página 63 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Donde: Mk = par de vuelco resultante. Fa = carga axial. DL = diámetro de rodadura del rodamiento. μ = coeficiente de rozamiento para rodamientos del tipo KD 320 (0,004). El momento de par de vuelco y la carga axial ya han sido calculados, luego sustituyendo los valores tenemos un par de rozamiento de arranque de: Mr 0,004 4,4·1576,08 571·1,8 kNm 2 Mr= 15,9 kNm 3.8.1.2 Cálculo del par torsor del viento El cálculo del par torsor debido al viento se calculará con la siguiente expresión: L Mtv Fv · ·cosα 2 Donde: Mtv= momento torsor debido al viento Fv= fuerza debida al viento L= longitud de la pluma α= angulo de inclinación de la pluma El valor de la fuerza del viento ya ha sido anteriormente calculado y la longitud y el angulo se corresponderán a aquellos valores de la situación crítica. Sustituyendo valores se obtiene un par torsor de: EUITI BILBAO FEBRERO 2015 Página 64 GRÚA TELESCÓPICA AUTOPROPULSADA Mtv 8,4· 3. ANEXOS 20 · cos 80 kNm 2 Mtv= 14,58 kNm 3.8.1.3 Cálculo del momento torsor total El momento torsor total será la suma del par de rozamiento de arranque y el momento torsor debido al viento, por lo tanto se obtiene un valor de: Mt= 15,9+14,58 kNm Mt= 30,48 kNm 3.8.1.4 Cálculo del par de cálculo Un vez obtenido el momento torsor total se calcula el par de cálculo. Mr2 Mt η Mr2 30,48 kNm 0,9 Mr2=33,86 kNm 3.8.1.5 Cálculo de la potencia del motor Una vez obtenido el valor del par Mr2 se calculará la potencia necesaria mediante la siguiente fórmula: Pmec Mr2 ·n2 9550·η2 EUITI BILBAO FEBRERO 2015 Página 65 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Donde: Mr2= Par de cálculo n2= velocidad del motor η2= rendimiento dinámico Pmec 33,86·1000·1,2 kW 9550·0,9 Pmec= 4,6 kW 3.8.1.6 Selección del motor A la hora de seleccionar el motor de giro de la grúa, se deberá tener en cuenta que este sea capaz de producir un par mayor al resistente. Si no se indica lo contrario, la potencia Pn de los motores indicada en el catálogo está referida al servicio continuo S1. Para motores utilizados en condiciones distintas de S1, será necesario identificar el tipo de servicio previsto con referencia a las Normas CEI 2-3/IEC 34-1. En particular, el servicio de la presente aplicación es S3 – 25%. Por lo tanto debe cumplir: Pn Pmec fm El factor de incremento de la potencia fm puede extraerse de la siguiente tabla: Tabla 28: Factor de corrección según el tipo de servicio. EUITI BILBAO FEBRERO 2015 Página 66 GRÚA TELESCÓPICA AUTOPROPULSADA Pmec fm 3. ANEXOS 4,6 3,68 1,25 Dentro de la columna de 4p se tomará el motor BN 132 S, ver anexo 3.31 Debe cumplirse además otra condición para que el motor sea válido: CS CS Pn Pmec fm 1,2 5,5 1,49 1,2 9 3,68 3.8.1.7 Comprobación de la potencia de arranque Hay que deducir el momento de las inercias producidas por las masas en movimiento en el eje del motor. It ∑ Gi ·ri 2 g Donde: Gi=peso de la pluma y de la carga Ri= distancia a cada una de las cargas g= aceleración de la gravedad It 60· 10·cos80 2 500 20cos80 9,81 2 mm It= 633.196 mm4 EUITI BILBAO FEBRERO 2015 Página 67 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS π n 30 ta Donde: ta= tiempo de aceleración n= velocidad del motor π 1,2 30 8 0,015 P I ε n 716 η P 633196 0,015 1,2 716 0,87 18,3CV · 735,5W 1KW · 1CV 1000W 13,45 kW Se debe cumplir la siguiente expresión para que el motor elegido sea válido: P P P 4,6 13,45 18 kW Como la Pn del motor elegido era 5,5 no se cumple la condición anterior luego el motor seleccionado no sería válido y el nuevo motor sería el BN 180M. Anexo 4: Dimensionamiento de elementos secundarios 3.9 Bulones Los bulones son tornillos de tamaño relativamente grande, con rosca solo en la parte extrema de su cuerpo, utilizados en obras de ingeniería, maquinaria pesada, vías férreas, etcétera. Otro ejemplo es su utilización en grúas de gran envergadura, los tornillos que unen las secciones mayores a la grúa se hacen llamar bulones. EUITI BILBAO FEBRERO 2015 Página 68 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.9.1 Bulones de anclaje del cilindro de elevación Para unir el cilindro de elevación a la pluma y a la estructura, se utilizarán bulones. Estos elementos deberán resistir la fuerza a cortadura provocada por la fuerza de compresión del cilindro. Las cargas que producen el esfuerzo de compresión han sido analizadas en el apartado 3.5 Como se puede observar, la fuerza de compresión máxima a la que estará sometido el cilindro será de 928 kN. La tensión máxima a cortadura vendrá definida por la siguiente expresión: τmax 4 4Q τ 3 3S Puesto que se desconoce el diámetro, el término ζmax quedará en función de éste, siendo: τmax 4·928·1000 π 3 d2 4 1575422 d2 1,57 MPa d2 El bulón se dimensionará a fatiga, puesto que está sometido a una serie de cargas fluctuantes que varían su valor desde 0 hasta el valor máximo. Se optará por un ciclo de carga pulsatorio para el dimensionamiento del elemento tratado. EUITI BILBAO FEBRERO 2015 Página 69 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Figura 17.Diagrama de ciclo de carga del bulón Se obtienen las tensiones de cortadura media y de amplitud mediante la siguiente fórmula: τm τr τmax τmin 2 τmax ‐τmin 2 Substituyendo los valores correspondientes: τm τr 0,78 Mpa d2 Una vez calculadas las tensiones anteriormente referenciadas, se emplearán las herramientas de Mohr y Von Mises para pasar de un estado de tensión tangencial a un estado de tensión normal, esto nos permitirá comparar las solicitudes con la resistencia del material. Las ecuaciones empleadas son las siguientes: EUITI BILBAO FEBRERO 2015 Página 70 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS - Mohr σx ‐σy 2 σ1 ,σ2 σx ‐σy 2 2 τxy 2 - Von Mises σ1 2 σ2 2 ‐σ1 σ2 σeq Sustituyendo valores: σ1 ,σ2 σeq 0,78 MPa d2 1,35 MPa d2 El siguiente paso es calcular la tensión máxima admisible del material para una vida infinita. El bulón estará construido en acero F-126, con las siguientes características mecánicas: σyp 1000 MPa σu 1200 MPa La tensión máxima admisible del material quedará definida por la siguiente expresión: σe Ce σ'e Donde: Para una σu=1200<1400 MPa→σ’e=0,5·σu=600 MPa EUITI BILBAO FEBRERO 2015 Página 71 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS CS=0,9 (ver figura 14) Cd=0,75 Ct=0,6 Cf=0,809 (ver tabla 30) Luego: σe 196 MPa Utilizando el diagrama de Soderberg (ver figura 15) para determinar la zona segura de trabajo a fatiga del bulón y tomando como coeficiente de seguridad 1,25 se realiza el siguiente cálculo: 1,35 d2 196 1,35 d2 1000 1 1,25 Se puede determinar el diámetro: d=100 mm El diámetro de los bulones de anclaje del cilindro de elevación con la pluma y con la estructura serán ambos de 100 mm. 3.9.2 Bulón de anclaje pluma-estructura La rotación de la pluma respecto la estructura se realizará por medio de un bulón, que estará sometido a un esfuerzo de cortadura provocado por la reacción de la pluma y la carga útil sobre éste. EUITI BILBAO FEBRERO 2015 Página 72 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Se conoce que la situación crítica a la que estará sometida la pluma se produce con una inclinación de 80º. Véase figura 6 Donde: L=20 m β=80º Pc=452 kN Pp=60 kN Fc=928 kN α=97,5º Se calculan las reacciones en el punto A. ∑Fx 0 R ax Fc cos α β R ax 451 kN ∑Fy 0 R ay Fc sen α β Pp Pc R ay 471,5 kN La resultante de ambas componentes será, por tanto: Ra R ax 2 R ay 2 652,5 kN Éste será por tanto el esfuerzo a cortadura que deberá resistir el bulón. Puesto que este bulón también trabajará a cortadura, se seguirá el procedimiento de cálculo empleado para el cálculo de bulones de anclaje del cilindro hidráulico. τmax 4·651,5·1000 π 3 d2 4 1,12 MPa d2 Al no conocer el diámetro de este bulón, ζmax quedará en función de éste. EUITI BILBAO FEBRERO 2015 Página 73 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS El bulón se dimensionará a fatiga. Estará sometido a un ciclo de carga pulsatorio, variando desde la posición de reposo a la cortadura máxima, ver ciclo de carga: Figura 18.Diagrama de ciclo de carga del bulón Se obtienen las tensiones de cortadura media y alterna: 0,56 MPa d2 τm τr Se utilizará Mohr y Von Mises para pasar de un estado de tensión tangencial a un estado de tensión normal, este proceso nos permitirá comparar la tensión equivalente con la tensión admisible del material: - Mohr σ1 ,σ2 σx ‐σy 2 σx ‐σy 2 2 τxy 2 EUITI BILBAO FEBRERO 2015 Página 74 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS - Von Mises σ1 2 σ2 2 ‐σ1 σ2 σeq Sustituyendo valores: σ1 ,σ2 σeq 0,96 MPa d2 1,66 MPa d2 σe Ce σ'e Donde: Para una σu=1200<1400 MPa→σ’e=0,5·σu=600 MPa CS=0,9 (ver figura 9) Cd=0,75 Ct=0,6 Cf=0,809 (ver tabla 30) Luego: σe 196 MPa Utilizando el diagrama de Soderberg para determinar la zona segura de trabajo a fatiga del bulón y tomando como coeficiente de seguridad 1,25 se realiza el siguiente cálculo, ver figura 19. EUITI BILBAO FEBRERO 2015 Página 75 GRÚA TELESCÓPICA AUTOPROPULSADA 1,66 d2 196 1,66 d2 1000 3. ANEXOS 1 1,25 Se puede determinar el diámetro: d=113 mm El diámetro de los bulones de anclaje del cilindro de elevación con la pluma y con la estructura serán ambos de 113 mm. 3.9.3 Bulones de anclaje del sistema telescopado. a) Bulones de anclaje superior Estos bulones tienen como función el anclaje entre dos tramos de la pluma. Deberán resistir el esfuerzo a cortadura provocado por la componente tangencial del peso de los tramos a sostener más la carga útil. El bulón más solicitado será el encargado de anclar el tramo 1 con el 2, puesto que deberá resistir el peso de los tramos 2, 3 y 4, más la carga útil manipulada. La situación crítica para este bulón será para una inclinación de la grúa, α= 82º y una carga útil, Qu, de 50 toneladas. El peso propio de la pluma es de 6 toneladas. La fuerza de cortadura a la que está sometido este bulón es de: F Pp Pc senα 50 6 sen82 55 T Por cuestiones estéticas, el bulón se diseñará con un diámetro de 110 mm, proporcionando así una cierta robustez que infunde confianza. Se comprobará, entonces, que este bulón sea capaz de resistir a fatiga el esfuerzo de cortadura calculado. EUITI BILBAO FEBRERO 2015 Página 76 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Se calculará la tensión máxima a cortadura soportada por el bulón siendo: τmax 4·55·01000 π 3 d2 4 0,93 MPa d2 Se calculará la resistencia del bulón a fatiga. Estará sometido a un ciclo de carga pulsatorio, variando desde la posición de reposo a la cortadura máxima: Figura 19.Diagrama de ciclo de carga del bulón Se obtienen las tensiones de cortadura media y alterna: τm τr τmax τmin 2 τmax ‐τmin 2 Substituyendo los valores correspondientes: EUITI BILBAO FEBRERO 2015 Página 77 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 0,46 MPa d2 τm τr Una vez calculadas las tensiones anteriormente referenciadas, se emplearán las herramientas de Mohr y Von Mises para pasar de un estado de tensión tangencial a un estado de tensión normal, esto nos permitirá comparar las solicitudes con la resistencia del material. Las ecuaciones empleadas son las siguientes: - Mohr σx ‐σy 2 σ1 ,σ2 σx ‐σy 2 2 τxy 2 - Von Mises σ1 2 σ2 2 ‐σ1 σ2 σeq Sustituyendo valores: σ1 ,σ2 σeq 0,46 MPa d2 0,79 MPa d2 σe Ce σ'e Donde: Para una σu=1200<1400 MPa→σ’e=0,5·σu=600 MPa EUITI BILBAO FEBRERO 2015 Página 78 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS CS=0,9 (ver figura 9) Cd=0,75 Ct=0,6 Cf=0,809 (ver tabla 30) Luego: σe 196 MPa Utilizando el diagrama de Soderberg para determinar la zona segura de trabajo a fatiga del bulón, se obtiene el coeficiente de seguridad. 0,79 0,112 196 0,79 0,112 1000 1 CS Se puede determinar que el coeficiente de seguridad es: CS=2,42 mayor que 1,5 luego el diámetro nos vale. La condición que debe cumplir para que el diámetro escogido sea válido es que el coeficiente de seguridad CS sea mayor que 1,5. En el caso de la grúa nos da un CS=2,42 por lo tanto en válido. b) Bulones de arrastre Estos bulones tienen como función el anclaje entre el tramo a telescopar de la pluma y el cuerpo del sistema de telescopado, permitiendo el arrastre de los tramos. Deberán resistir el esfuerzo a cortadura provocado por el peso de los tramos a manipular, repartido entre dos bulones. EUITI BILBAO FEBRERO 2015 Página 79 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS La situación crítica, como en el caso anterior es con la pluma inclinada 82º y telescopando el tramo2. Siendo el peso propio de 6 toneladas como se ha estimado anteriormente. La fuerza de cortadura a la que está sometido este bulón es de: F Pp senα 2 6 sen 82 T 2 Por cuestiones geométricas, se construirá está fijación con una sección cuadrada de 50x50 mm. La tensión máxima a cortadura máxima para una sección cuadrada se determina: τmax 3Q 2S τmax 3 3 104 18 MPa 2 0,052 Puesto que se trata de un elemento construido con el mismo material que el bulón de anclaje superior y soporta una tensión a cortadura mucho menor que éste, se considerará suficiente la sección de las fijaciones para resistir las solicitaciones, por lo que no se considerará necesaria la comprobación de resistencia. 3.10 Resortes Con el fin de evitar que los bulones de anclaje superior puedan desplazarse verticalmente de forma involuntaria, se colocarán resortes en hélice cilíndrica con hilo de sección circular que trabajan a compresión para resistir el peso de los bulones. El cálculo se realiza siguiendo las indicaciones del libro “Cálculo rápido de muelles y resortes” del autor “Antonio Bernaldo de Quirós”. EUITI BILBAO FEBRERO 2015 Página 80 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Éste es un cálculo iterativo, por el hecho de tener que partir de una hipótesis de factor de arrollamiento K = 1, esta suposición proporcionará un nuevo valor de k que habrá que comprobar con otro cálculo para observar si su valor cambia excesivamente, si las diferencias entre los valores no son muy grandes se tomará como hipótesis correcta. Teniendo los siguientes datos: Características del muelle Símbolo Valor Unidad Esfuerzo de cortadura τ 35 Kg/mm2 Carga axial P 15 Kg Flecha bajo la carga f 55 mm Diámetro D 75 mm Módulo de elasticidad G 8300 Kg/mm2 transversal Tabla 29: Características del muelle Se parte de la siguiente fórmula : τ 8K PD π d3 Donde: P = Carga axial D = Diámetro del resorte. τ = Esfuerzo de cortadura. d = Diámetro del hilo Se sustituyen los valores y se obtiene ésta en función de k y d de la siguiente forma: EUITI BILBAO FEBRERO 2015 Página 81 GRÚA TELESCÓPICA AUTOPROPULSADA K d3 τπ 8PD 3. ANEXOS 35π 0,0122 8 15 75 Una vez llegado a este punto se realiza la primera hipótesis anteriormente mencionada. Para K= 1 se obtiene un diámetro d= 4,34 mm. Éste valor permite continuar con el cálculo; se realiza una comparación entre diámetros: D d 75 17,27 4,34 Se introduce este dato en la siguiente tabla: EUITI BILBAO FEBRERO 2015 Página 82 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Figura 21. Cálculo gráfico del factor de arrollamiento (Libro, “Cálculo rápido de muelles y resortes”). Con los valores introducidos en la grafica anterior se obtiene un nuevo valor del factor de arrollamiento, siendo éste factor, k = 1,05. EUITI BILBAO FEBRERO 2015 Página 83 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS El siguiente paso a realizar es la comprobación del factor de arrollamiento, éste se realiza con el mismo método anterior, introduciendo en este caso el nuevo valor de K. El cálculo queda entonces de la siguiente manera: K d3 τπ 8PD 35π 0,0122 8 15 75 Partiendo del nuevo factor de arrollamiento k=1,05 se obtiene un valor del diámetro, d = 4,41. D d 75 16,95 4,41 Una vez calculada ésta comparación se entra éste nuevo dato a la tabla anterior, ver figura 27, proporcionando ésta un factor k=1,057 Como la diferencia entre los valores obtenidos en los cálculos del factor de arrollamiento no es elevada se considera como hipótesis correcta, tomando un valor de k=1,05. Continuando con los pasos recomendados en el libro mencionado, una vez obtenido el valor del factor de arrollamiento se calculan las siguientes características que definen el muelle. Se calcula la flexibilidad del muelle, el resultado obtenido permitirá calcular posteriormente la rigidez, ésta es la característica más importante del resorte puesto que proporcionará los datos suficientes para saber que fuerza es la que realiza el muelle al ser comprimido. El método de cálculo es el siguiente: La flexibilidad del muelle se estima mediante la fórmula: φ f P Donde: ϕ=Flexibilidad f = Flecha bajo la carga P = Carga axial EUITI BILBAO FEBRERO 2015 Página 84 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Sustituyendo los valores se obtiene: φ f P 55 3,67 mm/kg 15 Una vez calculada la flexibilidad se procede a estimar el valor de la rigidez mediante la ecuación siguiente: ∆ 1 φ Donde: Δ= Rigidez Sustituyendo los valores se obtiene: ∆ 1 φ 1 0,27 Kg/mm 3,67 Con el resultado de la rigidez y utilizando la formula siguiente se calculará el número de espiras útiles: 8PD3 n f Gd4 Donde: P=carga axial D= Diámetro del muelle d = diámetro del hilo G=Módulo de elasticidad transversal n = Número de espiras útiles. Se obtiene un valor de n= 3,7 espiras útiles, se aproxima este valor al entero más cercano proporcionando un resultado de 4 espiras útiles. EUITI BILBAO FEBRERO 2015 Página 85 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Por último se calcula la longitud mínima del muelle completamente comprimido utilizando la fórmula que se detalla a continuación: lmin 1,08d n 1,5 Donde: lmin= Longitud mínima del muelle completamente comprimido d = Diámetro del hilo n= número de espiras útiles. Sustituyendo los valores: lmin 1,08d n 1,5 1,08 4,5 4 1,5 26,73 mm Características del muele Símbolo Valor Unidad Flexibilidad ϕ 3,67 mm/kg Rigidez Δ 0,27 Kg/mm Número de espiras útiles n 4 - 26,73 mm Longitud mínima en lmin compresión Tabla 30: Resumen de resultados Anexo 5: Selección de elementos por catálogo 3.11 Cilindros hidráulicos de carrera corta Se instalarán cuatro cilindros hidráulicos en el cuerpo del sistema de telescopado. Dos de ellos en los laterales, encargados de desplazar los bulones de anclaje lateral. Estos cilindros no deberán superar más esfuerzo que el rozamiento del bulón de anclaje lateral con su cojinete. Este esfuerzo se despreciará. EUITI BILBAO FEBRERO 2015 Página 86 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Los otros dos cilindros se instalarán en la parte superior del cuerpo del sistema, se encargarán de desplazar las pinzas verticalmente para que estas sean capaces de desembulonar los tramos. Estos cilindros deberán vencer la tracción ejercida sobre las pinzas por acción del muelle del bulón. Teniendo en cuenta que las pinzas desplazarán 40mm el bulón y que el muelle tiene una constante k=0,27 Kg/mm, la fuerza a tracción de retroceso que deberá vencer el cilindro será igual a: F K x 0,27 40 10,8 Kg Los cilindros seleccionados, tienen una carrera de 50 mm y una fuerza a tracción de retroceso de 320 kg. Ver anexo 3.30, referencia 8003/Z. 3.12 Rodamientos de giro A la hora de la elección del rodamiento de giro se ha optado por los rodamientos Rothe Erde, ya que se trata de los líderes mundiales en la fabricación de grandes rodamientos para grúas. Para la selección del rodamiento se va a seguir el método de cálculo y dimensionado recomendado por el fabricante Rothe Erde. En el catálogo de Rothe Erde existen distintas series como pueden ser KD210, KD 320, KD 600,RD 700, RD 800 y RD 900. En el caso del estudio de esta grúa se ha optado por la elección de la serie KD 320, rodamiento de bolas giratorias. El rodamiento de giro se seleccionará en función del par de vuelco máximo que deberá soportar y la carga axial máxima a la que estará sometido. Como ya se ha calculado en apartados anteriores se sabe que los valores del par de vuelco y de la carga axial máxima son los siguientes: Mk=1576,08 kNm EUITI BILBAO FEBRERO 2015 Página 87 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Q= 571 kN Siguiendo las indicaciones del catálogo se deberá multiplicar la carga por un factor de seguridad que será de 1,25, por lo tanto los nuevos valores del par de vuelco y de la carga axial serán: Mk= 1576,08·1,25= 1970,1 kNm Q=571·1,25= 713,75 kN Figura 22: Curva de carga límite estática Para calcular la vida de este rodamiento, se hará siguiendo las instrucciones del fabricante. Se dibujará una recta en la gráfica que vaya desde el origen hasta el punto que representa las solicitaciones del rodamiento, (x=714 kN,y=1970 kN·m). Se calculará la intersección de esta recta con la curva del rodamiento (curva 9). A partir de aquí, se calculará el factor fL: fl fao fa Mk o Mk EUITI BILBAO FEBRERO 2015 Página 88 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Donde: fao=fuerza axial admisible del rodamiento, en la intersección con la recta fa=fuerza axial a la que se someterá el rodamiento Mko=Par de vuelco admisible del rodamiento, en la intersección con la recta Mk=Par de vuelco al que se someterá el rodamiento El factor fl será por lo tanto: fl 790 714 2190 1970 fl= 1,1 Mediante este factor se podrá calcular el número de giros que resistirá el rodamiento, mediante la siguiente ecuación: 3 G fl G 1,1 30000 3 30000 G= 39930 giros 3.13 Circlips Se utilizarán circlips en diferentes ejes y bulones para evitar su desplazamiento transversal, de la siguiente forma: -Se colocarán circlips en los bulones de anclaje del cilindro de elevación. -Se colocará un circlip en el bulón de anclaje de la pluma con la estructura. -Se colocarán circlips en el eje de las poleas, para separar las poleas entre sí. Los circlips se seleccionarán en función del diámetro del eje. Ver anexo 3.20. EUITI BILBAO FEBRERO 2015 Página 89 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.14 Poleas Se seleccionarán poleas en función del diámetro del eje, de 110 mm y del diámetro mínimo calculado para las poleas, siendo mínimo 450 mm para las poleas de cable y 315 mm para poleas compensadoras. Ver anexos 3.6 Las poleas de cable serán las correspondientes a la referencia 4100298 del anexo 3.22. Las poleas compensadoras serán las correspondientes a la referencia 462387 del anexo 3.22. Estas poleas ya disponen de cojinetes de fricción. 3.15 Ganchos Se seleccionará un Gancho para elevar cargas de hasta 50 toneladas, referencia 2012059, anexo 3.23 3.16 Cojinetes Se seleccionarán cojinetes para evitar la fricción entre los bulones de anclaje de la pluma con la estructura, la pluma con el cilindro de elevación y la estructura con el cilindro de elevación. La selección de los cojinetes vendrá en función de la fuerza que deberán soportar y del diámetro del bulón. Se seleccionarán cojinetes del fabricante GAES, anexo 3.20. En su catálogo, se puede ver que la presión máxima admisible por el material es de 250 N/mm2. La presión que actúa sobre ellos se determina en función de: P F bd Donde: P= 250 MPa d: diámetro del bulón EUITI BILBAO FEBRERO 2015 Página 90 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS b: longitud del cojinete. Para los bulones de anclaje del cilindro hidráulico, que soportarán la carga producida por la compresión del cilindro: b F dP 930000 0,0372 mm 0,1 250 106 Se seleccionarán cojinetes PAP14060P10 del anexo 3.20 Para el bulón de anclaje de la pluma a la estructura, que soportará el esfuerzo a cortadura producido por la reacción del peso de la pluma y la carga útil: b F dP 652500 0,023 mm 0,113 250 106 Se seleccionarán cojinetes PAP13060P10 del anexo 3.20 Se calculará la vida de los cojinetes a partir de las tablas del anexo 3.20 Esta vendrá determinada por la presión que soporta el cojinete y de la velocidad de deslizamiento, siendo: La velocidad, v, se calculará a partir de los datos de otros fabricantes, donde la pluma puede tardar aproximadamente 45 segundos en inclinarse hasta 82º, partiendo desde la posición horizontal. Teniendo en cuenta el diámetro de los cojinetes, de 0,1 m, se calculará la velocidad de deslizamiento ∆θ ω 2π82° 1,43 rad 360 1,43 0,03 rad/s 47 EUITI BILBAO FEBRERO 2015 Página 91 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS v 0,03 0,05 0,0015 m/s Y la presión sobre los cojinetes será, para los bulones de anclaje del cilindro hidráulico: P F bd 930000 155 MPa 0,1 0,06 Y para el cojinete del bulón de anclaje de la pluma a la estructura: P F bd 652500 0,113 0,006 96 MPa Por lo tanto, para los dos tipos de cojinetes: PAP14060P10: P·v=0,2325 MPa·m/s PAP13060P10: P·v=0,144 MPa·m/s Observando la gráfica del catálogo de cojinetes de GAES: EUITI BILBAO FEBRERO 2015 Página 92 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Figura 23. Horas de vida de los cojinetes en función de P·v Los cojinetes para el anclaje del cilindro hidráulico y el de la pluma a la estructura tendrán, respectivamente, una vida de 3500 y 4000 horas de funcionamiento. 3.17 Elementos de estanqueidad Para conseguir un perfecto funcionamiento del cilindro hidráulico es imprescindible la colocación de anillos que permitan realizar una estanqueidad idónea para las condiciones de trabajo, además de garantizar un deslizamiento uniforme y suave del pistón en su carrera dentro de la camisa. Estos anillos se insertarán en unas ranuras realizadas tanto a la cabeza del cilindro de elevación como al cuerpo de telescopado en el sistema de telescopado así como a los pistones correspondientes. EUITI BILBAO FEBRERO 2015 Página 93 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Para realizar la selección de estos anillos se han tenido en cuenta dos factores importantes. El diámetro del pistón y la presión máxima de trabajo capaz de soportar. Estos elementos se dividen en función del tipo de sistema que lo requiere: 3.17.1 Sistema telescopado a) Cuerpo telescopado 1) Anillo rascador: La selección de este elemento se realiza en función del diámetro del vástago y de la presión máxima de trabajo, en este caso, el sistema de telescopado cuenta con un vástago de 0,19 m y una presión de 30 MPa, por lo tanto se ha decidido escoger un anillo cuyo diámetro interior sea de 0,19 m. para ver las propiedades, consultar anexo 3.28. 2) Guía de vástago: las guías tienen la función de suavizar el movimiento entre el vástago y la cabeza del sistema además de soportar la presión en el retroceso del sistema, para su selección se tienen en cuenta los mismos factores que en el caso del anillo rascador, el diámetro del vástago y la presión de trabajo. Se ha seleccionado, pues un anillo con diámetro interior de 0,19 m. para ver las propiedades, ver anexo 3.26. b) Pistón del cilindro telescopado 1) Junta de pistón: Este tipo de junta se dispone por la imposibilidad de insertar juntas tóricas, debido a la alta presión a la que está sometida el sistema, puesto que las juntas tóricas tienen una gran tendencia a retorcerse y a producir la extrusión. La junta de pistón pues, es un sistema alternativo que permite mantener la diferencia de presión entre cavidades permitiendo una buena estanqueidad. Para su elección se ha tenido en cuenta, el diámetro de la camisa de telescopado y su presión de trabajo. Se ha optado por seleccionar una junta de pistón de 0,23 m. consultar el anexo 3.29, para ver las propiedades. 2) Guía de pistón: Este elemento se selecciona teniendo en cuenta además de los factores comentados anteriormente, la longitud que precisa en función de la fuerza radial que ha de EUITI BILBAO FEBRERO 2015 Página 94 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS soportar. Típicamente se utilizaban guías de pistón planas, que cuando sufría una fuerza radial la distribuía de forma parcial, es decir que soportaba mas solicitación una parte que otra. Ver anexo 3.27. En este caso el tipo de guía optado tiene un perfil más sinuoso que permite repartir los esfuerzos de forma más liviana. Para el cálculo de la longitud de guía se empleará la siguiente ecuación: lmin F Pd Donde: F= Fuerza radial [MN] P= Presión de trabajo [Mpa] d=Diámetro del pistón [m] lmin 0,015 0,004 m 20 0,23 Como se puede observar la longitud de la guía de pistón es muy pequeña, pero por cuestiones de diseño, se decide introducir tres guías repartidas en todo el pistón. Estas guías tendrán unas dimensiones de 0,004 m de anchura, 0,23 m de diámetro exterior. Ver anexo 3.27. 3) Junta interior de pistón. Para la reducción realizada en el vástago, con la finalidad de insertar el pistón, se deberá disponer de una guía interior de pistón, ésta tendrá las mismas características que la junta de pistón descrita con anterioridad, dispondrá un diámetro interior de 0,08 m. EUITI BILBAO FEBRERO 2015 Página 95 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.17.2 Sistema de elevación Para la selección de los elementos de estanqueidad con los que se deberá contar en el sistema de elevación se siguen exactamente los mismos principios que en el caso descrito anteriormente, en el sistema de telescopado. 1) Anillo rascador: Diámetro interior de 0,21 m. para ver las propiedades, consultar anexo 3.28 2) Guía de vástago: Diámetro interior de 0,21 m. para ver las propiedades, ver anexo 3.26 3) Junta de pistón: Diámetro exterior de 0,25 m. consultar propiedades en anexo 3.29. 4) Guía de pistón: se dispondrán de 3 guías de pistón con un diámetro exterior de 0,25 m y una anchura de 0,004 m. Ver anexo de 3.26. EUITI BILBAO FEBRERO 2015 Página 96 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS Anexo 6: Hojas de especificaciones del fabricante 3.18 Catálogo de cojinetes GAES EUITI BILBAO FEBRERO 2015 Página 97 GRÚA TELESCÓPICA AUTOPROPULSADA EUITI BILBAO FEBRERO 2015 3. ANEXOS Página 98 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.19 Rodamientos Rothe Erde, serie K320 EUITI BILBAO FEBRERO 2015 Página 99 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.20 Circlips AASRAA EUITI BILBAO FEBRERO 2015 Página 100 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.21 Cables y alambres especiales,S.A EUITI BILBAO FEBRERO 2015 Página 101 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.22 Poleas McKissick EUITI BILBAO FEBRERO 2015 Página 102 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.23 Ganchos McKissick EUITI BILBAO FEBRERO 2015 Página 103 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 104 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 105 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.24 Propiedades del material 1100 QL EUITI BILBAO FEBRERO 2015 Página 106 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.25 Propiedades del material 960 QL EUITI BILBAO FEBRERO 2015 Página 107 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.26 Guía del vástago EUITI BILBAO FEBRERO 2015 Página 108 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 109 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.27 Guía del pistón EUITI BILBAO FEBRERO 2015 Página 110 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 111 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.28 Rascador EUITI BILBAO FEBRERO 2015 Página 112 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.29 Junta del pistón EUITI BILBAO FEBRERO 2015 Página 113 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 114 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.30 Cilindros hidráulicos D.E. brida delantera, CICROSA EUITI BILBAO FEBRERO 2015 Página 115 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS 3.31 Motores Bonfiglioli - Símbolos y unidades de medida EUITI BILBAO FEBRERO 2015 Página 116 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS - Características generales EUITI BILBAO FEBRERO 2015 Página 117 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 118 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 119 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 120 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS - Datos técnicos EUITI BILBAO FEBRERO 2015 Página 121 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS - Dimensiones de los motores EUITI BILBAO FEBRERO 2015 Página 122 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 123 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 124 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS - Características eléctricas EUITI BILBAO FEBRERO 2015 Página 125 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 126 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 127 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 128 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 129 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 130 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 131 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS - Características mecánicas EUITI BILBAO FEBRERO 2015 Página 132 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 133 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 134 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 135 GRÚA TELESCÓPICA AUTOPROPULSADA 3. ANEXOS EUITI BILBAO FEBRERO 2015 Página 136
 0
0
Anuncio
Documentos relacionados

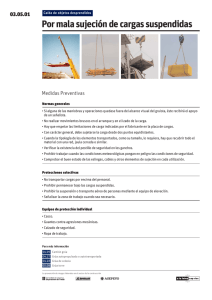
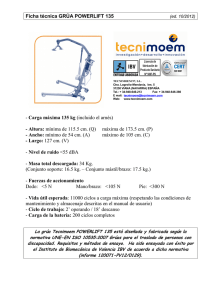

Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados