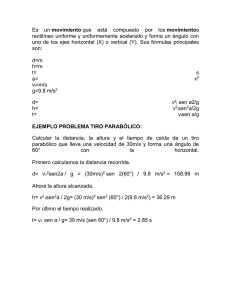
Capítulo 5:Análisis en el dominio temporal Respuesta transitoria y
Anuncio

Capítulo 5:Análisis en el dominio temporal Objetivos: 1. 2. 3. La distinción entre la respuesta transitoria y la permanente, Las señales de prueba. La influencia de la ubicación de los polos del polinomio característico con la respuesta del régimen transitorio. Respuesta temporal de un sistema: respuesta transitoria y en régimen permanente y (t ) = y rt (t ) + y rp (t ) lim y (t ) = y rp (t ) = y ss (t ) t →∞ lim y rt (t ) = 0 t →∞ Solución de la homogénea y de la particular Respuesta transitoria y régimen permanente Transitorio: rapidez y amortiguamiento Permanente: estabilidad y precisión Respuesta transitoria y régimen permanente Transitorio: rapidez y amortiguamiento Permanente: estabilidad y precisión 1 Señales de prueba (1/2) Las entradas a las que van a ser sometidos los sistemas de control no se conoce con anticipación. pueden ser representadas mediante el truncamiento de la serie de Taylor para los términos superiores a segundo grado: x(t ) ≅ x0 + x1t + x2 t2 2 Cuando el sistema es LTI y por aplicación del teorema de superposición, la respuesta ante una entrada compleja puede ser descompuesta en aquellas debidas a las señales de pruebas simples. Señales de prueba (2/2) Polinomio característico. Influencia de la respuesta transitoria Sea un sistema LTI cualquiera ante una entrada en escalón unitario. x(t) y(t) FDT g(t) L[x(t)] G(s) X(s) L-1[Y(s)] Y(s)=X(s)*G(s)=X(s)G(s) N (s ) b0 + b1 s + ... + bm s m G (s ) = = D(s ) a 0 + a1 s + ... + a n s n n≥m k js + Lj k k Y (s ) = 1 + Σ i + Σ 2 s i s + pi j s + 2α j s + ω n, j 2 y (t ) = k1 + Σ ki e − pi t + Σ L j M j e i j −α j t 2 sen ω n , j − α j ⋅ t + ϑ j 2 Tipo de respuesta temporal dependiendo y(t) x(t) FDT de los polos(1/3) L [Y(s)] g(t) -1 L[x(t)] k js + Lj k k Y (s ) = 1 + Σ i + Σ 2 s i s + pi j s + 2α j s + ω n , j 2 y (t ) = k1 + Σ ki e − pi t i + Σ L j M je −α j t j Y(s)=X(s)*G(s)=X(s)G(s) G(s) X(s) 2 sen ω n , j − α j ⋅ t + ϑ j ESTABLE INESTABLE 1 14 0.9 12 0.8 0.7 10 0.6 k*exp(-t/T) k*exp(t/ T) 8 0.5 6 0.4 -1/T1 0.3 4 1/T 0.2 0 2 -1/T2 0.1 0 2 4 6 8 10 0 0 12 0.5 1 1.5 tiempo [s] (sec) 2 2.5 3 tiempo [s] (sec) 3.5 4 4.5 5 Tipo de respuesta temporal dependiendo y(t) x(t) FDT de los polos(2/3) L [Y(s)] g(t) -1 Y (s ) = L[x(t)] k js + Lj k k1 +Σ i +Σ s i s + pi j s 2 + 2α j s + ω n , j 2 y (t ) = k1 + Σ ki e − pi t + Σ L j M j e i −α j t j G(s) X(s) Y(s)=X(s)*G(s)=X(s)G(s) 2 sen ω n , j − α j ⋅ t + ϑ j ESTABLE INESTABLE 0.7 4 0.6 2 0.5 0 0.4 -2 0.3 0.2 -4 k*exp(-at)*sen(wt+o) k*exp(-at)*sen(wt+o) 0.1 -6 0 -8 -0.1 -0.2 0 5 10 -10 15 0 tiempo [s] (sec) 1 2 3 4 5 6 tiempo [s] (sec) Tipo de respuesta temporal dependiendo y(t) x(t) FDT de los polos(3/3) L [Y(s)] g(t) -1 L[x(t)] k js + Lj k k Y (s ) = 1 + Σ i + Σ 2 s i s + pi j s + 2α j s + ω n , j 2 y (t ) = k1 + Σ ki e i − pi t + Σ L j M je −α j t j G(s) X(s) Y(s)=X(s)*G(s)=X(s)G(s) 2 sen ω n , j − α j ⋅ t + ϑ j CRÍTICAMENTE ESTABLE 1 0.8 0.6 0.4 0.2 0 -0.2 -0.4 k*sen(wt) -0.6 -0.8 -1 0 5 10 15 20 25 30 35 40 tiempo [s] (sec) 3