Descargar 120,7 kb - U
Anuncio

3. Control de procesos con lógica difusa (CLD)
3.1. Presentación
El Control por Lógica Difusa (CLD) es un tipo de control, usualmente de
tipo realimentado, que está basado en reglas. Se orienta al mejoramiento de las
características del control "clásico", por ejemplo, incorporando conocimiento que
no puede ser descrito en el modelo analítico en que se basa el diseño del
algoritmo de control, y que usualmente, en control "clásico", se deja para modos
manuales de operación u otros mecanismos de límites o de seguridad.
Las aplicaciones de CLD pueden dividirse en dos clases:
1) Aquellas en que el CLD es un control supervisor, es decir, complementa al
control realimentado convencional, y
2) aquellas en que el CLD reemplaza al control convencional.
A pesar de que la trascendencia del CLD en el contexto teórico general del
control de procesos es aún objeto de discusión, el mejor argumento para
consagrar su lugar en la ingeniería de control es que se trata de una tecnología
útil desde un punto de vista industrial y comercial [Driankov, 1993].
Se argumenta que otra ventaja del CLD frente al control tradicional es la
reducción del tiempo de desarrollo y mantención [Driankov 1993], lo que está
mostrado con diferentes ejemplos, sin embargo, parece más prudente señalar
que puede resultar así, pero que depende de la aplicación que se trate. Por
ejemplo, si una planta está bien modelada, y existen ya algoritmos de control
funcionales (o para problemas similares), optimizar el control podrá significar un
esfuerzo menor que diseñar un sistema de CLD completamente nuevo.
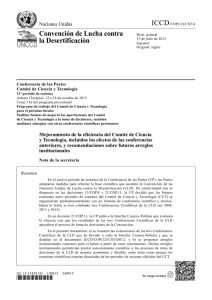
Un diseño de un controlador PID convencional parte por modelar el
sistema o proceso usando ecuaciones diferenciales, en cambio, en el CLD las
reglas se orientan a modelar el comportamiento del operador humano. En las
figuras 3.1 y 3.2 se muestran los diagramas de bloques generales para un CLD y
para un sistema de control “clásico”.
Figura 3.1. Diagrama de bloques CLD
Figura 3.2. Diagrama de bloques control “clásico”
El CLD funciona básicamente de la forma explicada en el capítulo 2, es
decir, aplicando un conjunto de reglas que se combina usando lógica difusa. Una
regla se activa ("dispara") si se cumplen las condiciones descritas en las premisas
de la regla. La evaluación de aquellas condiciones se efectúa en forma difusa,
tomando en cuenta la incerteza inherente al conocimiento disponible. Las
variables de entrada (en inglés, inputs) se interpretan como variables lingüísticas.
No es inusual que más de una regla sea gatillada para una misma combinación
de variables de entrada, en este caso, la máquina de inferencia en un CLD actúa
como un procesador paralelo, es decir, todas las reglas que tienen algún grado
de verdad en sus premisas son gatilladas y contribuyen al conjunto difuso de
salida.
Aplicando la inferencia de Mamdani, el resultado que arroja cada una de
las reglas se combina para dar el resultado del conjunto, que es la unión de las
salidas de cada una de las reglas gatilladas. Los consecuentes de todas las
reglas gatilladas se relacionan en el rango [-1,1], combinándose localmente por
un OR lógico. Un OR lógico es una conorma T (norma S), por ejemplo la función
max (máximo puntual). Es importante mencionar que se podría usar cualquier
conorma T para ello, la función max es la más usada en aplicaciones de tiempo
real. La expresión para el conjunto difuso de la variable de salida dada por la
inferencia de Mamdani es entonces:
∀ b ∈ UB: uB(CR)(b) = maxk { min (uA(k)(a), uB(k)(b)) }.
Existen variados métodos para construir la interfaz de des-difusión de un
CLD, como por ejemplo:
-
centro de gravedad (o centro de área) (en inglés: center of gravity);
promedio de los supremos (en inglés: mean of maxima);
alturas (en inglés: heights).
El método de centro de gravedad es el más utilizado, consiste en obtener
la abscisa del centro del área que se forma bajo la función que representa al
conjunto difuso combinado de salida.
Como su nombre lo indica, el promedio de los supremos se obtiene
considerando únicamente los trazos con valor de pertenencia máximo dentro de
todo el conjunto.
El método de alturas considera el valor de la altura (equivalente al grado
de certeza) obtenido por cada una de las reglas individuales gatilladas. El centro
de gravedad de cada consecuente de esas reglas, que es conocido previamente,
(típicamente trapezoides o triángulos) se pondera por el valor de la altura en cada
caso, y se obtiene un promedio ponderado de todos los consecuentes
representados en el conjunto de salida.
El promedio de los supremos y el de alturas son métodos
computacionalmente más rápidos en comparación con el método de centro de
gravedad.
La Figura 3.3 grafica el proceso recién descrito para dos reglas arbitrarias,
utilizando el método de centro de gravedad como interfaz de des-difusión.
Figura 3.3. Un ejemplo sencillo de inferencia difusa.
Algunos han descrito a un CLD como un sistema experto en tiempo real, la
aceptación de esta afirmación depende de la acepción que se tenga de lo que es
un sistema experto, algunas de las características importantes para un sistema
experto que el CLD no posee, son la capacidad de explicar las decisiones
tomadas y presentar una interfaz amistosa que muchas veces interactúa con el
usuario.
El CLD no es una panacea cuya aplicación sea obviamente superior en
cualquier aplicación, se ha visto que puede ser ventajoso aplicar CLD cuando una
o más de las variables controladas son continuas, y/o si el modelo de la planta (o
proceso) no está bien definido, es muy complejo o no se conoce. Típicamente se
aplica cuando el manejo de planta más adecuado ha sido hecho por operadores
humanos con experiencia (basado en heurística). También ha mostrado ventajas
en los casos en que es importante usar sensores de baja precisión y/o bajo costo.
Repasemos ahora algo de historia del CLD, y del estado del arte. En un
comienzo la lógica difusa estuvo limitada al terreno teórico. La primera
demostración práctica del uso del CLD la dieron Mamdani y Assilian (Queen Mary
College, Londres, 1975), controlando un pequeño modelo de máquina a vapor. La
primera aplicación comercial importante ocurrió también en Europa, para un
controlador de temperatura de un horno de cemento desarrollado por Smidth y
Cía. en Dinamarca [Holmblad, 1982]. El primer microprocesador de inferencia
difusa fue desarrollado en los laboratorios AT&T Bell durante los primeros años
de la década de los 80.
Sin embargo, los grandes propulsores de la masificación en aplicaciones
de CLD en operación están en Japón. Los fabricantes japoneses han sido líderes
en esta área, con aplicaciones como:
a)
robots;
b)
ferrocarril subterráneo: permitiendo detener suavemente los trenes;
c)
máquinas lavarropas: usan sensores ópticos o electro-ópticos para
determinar la suciedad de la ropa y determinar la cantidad óptima
de detergente, agua y ciclos de lavado necesarios;
d)
refrigeradores: sistema de auto-descongelado;
e)
cámaras: para compensar en situaciones de luz complicadas (entre
otras aplicaciones);
f)
frenos anti-bloqueo (ABS).
También existen aplicaciones de lógica difusa en que ésta se utiliza como
herramienta en la modelación de procesos complejos o pobremente definidos,
construyendo modelos difusos (sin embargo, las aplicaciones prácticas actuales
son generalmente controladores difusos).
Tal como en los controladores convencionales, en variadas situaciones es
ventajoso utilizar controladores difusos adaptivos. La mayor complejidad de incluir
adaptación en el controlador es que agrega un elemento de potencial
inestabilidad, por lo que no es siempre aconsejable. Existen varias formas de
incorporar adaptabilidad en un controlador difuso. Por ejemplo, la definición del
recorrido universal de cada variable de entrada, y en consecuencia, en como se
efectúa la normalización, puede ser adaptiva. La selección inicial de los factores
de escala respectivos podrá ser modificada (por ejemplo, utilizando reglas de
adaptación) de acuerdo a la variación dinámica de la planta.
3.2. Principios de diseño de un CLD
La selección de los factores de escala para normalizar los recorridos
universales de cada variable son un compromiso entre la sensibilidad durante el
tiempo de subida (en inglés: rise time) y la precisión requerida en régimen
permanente (en inglés: steady-state precision).
Las variables de entrada en un CLD pueden ser escogidas de muchas
formas, sin embargo, lo típico es que sean las siguientes, habiendo también
variaciones en el tema:
a)
variables de error: la diferencia entre el valor actual de cada una de
las variables controladas y el valor deseado (e).
b)
variables de tasa de variación del error: suponiendo que las
mediciones de las variables controladas son series discretas en el
tiempo con tasa de muestreo constante, la tasa de variación del
error (ê) en el instante k se construye como:
ê(k) = e(k) - e(k-1).
Así también es usual que cada variable de salida (en inglés: output) del
controlador esté dada por:
u(k) = u(k-1) + du(k)
, en que el cambio incremental du(k) está determinado por e y ê.
La representación del conjunto de reglas que forman la base de
conocimiento del controlador difuso puede hacerse usando tablas difusas de
decisión, o mapas de reglas difusas. Un mapa de reglas difusas muestra las
reglas de la base de conocimiento que serán gatilladas ante los diferentes valores
difusos que tomen dos variables de entrada. La Figura 3.4 muestra un mapa de
regla difusa de una regla específica.
ng
np
E2
ce
pp
pg
ng
np
E1
ce
pp
pp
pg
Figura 3.4. Esquema de un mapa de regla difusa.
Un mapa de regla difusa como el mostrado en la Figura 3.4 indica que se
activará la consecuencia “pp” si la entrada E1 pertenece a “pp” o “pg” y E2
pertenece a “np”.
En control difuso hay típicamente 3 tipos de conjuntos difusos que se usan
habitualmente, “incrementos”, “disminuciones” y “aproximaciones”. Por su
simpleza son muy utilizados aquellos que se definen usando líneas rectas
-
Incrementos o Función Gamma Γ:
Γ:U→[0,1]
a) Función de 2 parámetros (trazos rectos):
0; u < α
u −α
Γ(u;α , β ) =
;α < u < β
β −α
1; u > β
Una variante de Γ es la función S.
b) Función S:
0; u ≤ α
u − α 2
2
;α < u ≤ β
γ − α
S (u;α , β , γ ) =
2
1 − 2 u − γ ; β < u ≤ γ
γ −α
1; u > γ
α +γ
β=
2
S es una función de dos parámetros. Se usa más en lógica difusa y no
tanto en control difuso.
-
Decrementos o Función L:
L:U→[0,1], (función de dos parámetros).
1; u ≤ α
β − u
L(u;α , β ) =
;α < u ≤ β
β −α
0; u > β
-
Aproximaciones o Función π:
π:U→[0,1], (función de 4 parámetros)
0; u < α
u −α
;α ≤ u < β
β
α
−
π (u;α , β , γ , δ ) = 1; β ≤ u < γ
δ −u
δ − γ ;γ ≤ u < δ
0; u ≥ δ
Esta función puede ser simplificada a una función Λ (lambda) de tres
parámetros, es decir, triangular.
Por otra parte, extendiendo de la definición de la función S, puede definirse
una función “Campana - π”, de la siguiente forma:
S (u; γ − β , γ − β / 2); u ≤ γ
1 − S (u; γ − β , γ − β / 2); u > γ
π (u; β , γ ) =