Sintonización de Controladores
Anuncio

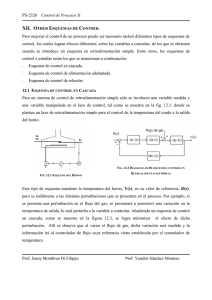
PS-2320 Control de Procesos II X. REGLAS PARA LA SINTONIZACIÓN DE CONTROLADORES PID El diseño de controladores se realiza en función del conocimiento del proceso, es decir, a partir del modelo del proceso y del esquema de control. Si no se dispone de la información antes descrita se plantea el uso de reglas de sintonización para controladores, PID, donde la función de transferencia del controlador PID es de la forma: G C (s) = K P (1 + TD s + K 1 )= P TI s TI TD TI s 2 + TI s + 1 s Ziegler y Nichols propusieron reglas para determinar los valores de la ganancia proporcional Kp, del tiempo integral Ti y del tiempo derivativo Td basados en las características de respuesta transitoria de una planta dada. La determinación de los parámetros de los controladores PID puede ser realizada por ingenieros en el sitio mismo efectuando experimentación en la planta. Hay dos métodos denominados reglas de sintonización de Cohen – Coon y Ziegler – Nichols, fundamentados en la experimentación en los cuales se pretende obtener, a lazo cerrado, un sobrepaso máximo del 25 %. 10.1 Método de Cohen – Coon (Reacción) En este método se obtiene experimentalmente la respuesta de la planta al aplicar un escalón unitario, como se muestra en la siguiente figura. Si la planta no incluye integrador(es) o polos dominantes complejos conjugados, la curva de respuesta al escalón unitario puede tener el aspecto de una curva en forma de S, como se observa en dicha figura, en el caso en que la curva no presente esta forma, no se puede aplicar el método. La curva en forma en S se puede caracterizar con dos parámetros, el tiempo del atraso L y la constante de tiempo τ. El tiempo de atraso y la constante de tiempo se determinan trazando una línea tangente a la curva en la forma de S en el punto de inflexión y se determinan las intersecciones de esta línea tangente con el eje del tiempo y con la línea c(t) = K, como se muestra en la siguiente figura. Entonces la Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero PS-2320 Control de Procesos II función de transferencia C(s)/U(s) se puede aproximar por un sistema de primer orden con atraso de transporte. C(s ) K ⋅ e − L ⋅s = U(s ) τ ⋅ s + 1 Una vez identificado los parámetros del proceso, se obtienen los parámetros del controlador utilizando la siguiente tabla. Tipo de controlador Kp TI Td P τ/L ∞ 0 PI 0,9 τ/L L/0,3 0 PID* 1,2 τ/L 2L 0,5L *tiene un polo en el origen y un cero doble en s = -1/L 10.2 Método de Ziegler – Nichols (Oscilación Continua) En este método, primero se hace Ti = ∞ y Td = 0 y usando solamente la acción del controlador proporcional, tal como muestra en la siguiente figura, se incrementa Kp desde cero hasta un valor crítico Kcr en el cual la salida exhiba por primera vez oscilaciones sostenidas. Si la salida no presenta oscilaciones sostenidas con periodo para cualquier valor que pueda tomar Kp, entonces no se puede aplicar este método. De esta forma se puede determinar experimentalmente la ganancia crítica Kcr y el período correspondiente Pcr de las oscilaciones sostenidas, a partir de los cuales se calculan los valores de los parámetros del controlador PID tal como se muestran a continuación. Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero PS-2320 Control de Procesos II Tipo de controlador Kp Ti Td P 5Κcr ∞ 0 PI 0,45Κcr 1/1,2Pcr 0 PID* 5Κcr 0,5Pcr 0,125Pcr *tiene un polo en el origen y un cero doble en s = -4/Pcr Ejemplo Se solicita que se sintonicen los parámetros del siguiente controlador utilizando el método de oscilación continua. Solución Se debe calcular el valor de la ganancia critica (si existe). Para ello se utiliza el criterio de estabilidad de Routh en la ecuación característica a lazo cerrado. Tomando la función de transferencia del controlador como Gc(s) = Kp. Ecuación Característica a Lazo Cerrado 1+ s3 KP =0 s(s + 4)(s + 8) 1 32 s 2 12 KP s 1 b1 0 s0 KP → → s 3 + 12s 2 + 32s + K P = 0 b1 = 12.32 - K P ≥0 12 → Kcr ≤ 384 Con dicho valor de Kcr se sustituye en la ecuación característica y se calcula la frecuencia de la oscilación sustituyendo s = jω Ecuación Característica a Lazo Cerrado s 3 + 12 s 2 + 32 s + 384 = 0 s = jω − ω 3 j − 12ω 2 + 32ωj + 384 = 0 (384 − 12ω 2 ) + (32 − ω 2 ) jω = 0 Como la solución que se busca es una raíz cuya parte real es cero, se tiene que: 384 − 12ω 2 = 0 ω 2 = 32 ⇒ ω = 5.66 A partir de dicho valor de ω se puede calcular el Período Crítico, Pcr, como: Pcr = 2π ω = 2π = 1.11 32 Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero PS-2320 Control de Procesos II Con dichos valores de Kcr y Pcr se calculan los parámetros del controlador. Kp = 0.6 Kcr = 230.4 Ti = 0.5 Pcr = 0.555 Td = 0.125 Pcr = 0.13875 En la siguiente gráfica se muestran las simulaciones correspondientes a la respuesta a lazo cerrado, sin controlador y con el PID sintonizado con los parámetros originales, así mismo, dos simulaciones adicionales en las cuales se han modificado el valor de los parámetros del controlador logrando mejoras sustanciales en las respuestas. Prof. Jenny Montbrun Di Filippo Prof. Yamilet Sánchez Montero