Capı́tulo 1
Cinemática del Sólido: Actitud
Ejercicio 1.0.1: Sean Ox2 y2 z2 los ejes ligados a un sólido. En el instante inicial coinciden con
los fijos Ox1 y1 z1 . Se gira el sólido π4 alrededor de su eje Oz2 , y luego otra vez π4 alrededor de
Ox2 .
Obtener la matriz de giro proyectando directamente los vectores unitarios.
Obtenerla mediante la composición de los dos giros.
Comprobar que es ortogonal, multiplicándola por su transpuesta.
Ejercicio 1.0.2: Sean Ox2 y2 z2 los ejes ligados a un sólido. En el instante inicial coinciden con
los fijos Ox1 y1 z1 .
Se gira el sólido 90o alrededor de su eje Ox2 y a continuación otros 90o alrededor de su
eje Oy2 , en la nueva posición. Obtener la posición de los vectores unitarios del sólido.
Con el sólido en la posición original, se dan los mismos giros pero en orden inverso: primero
alrededor de Oy2 y luego de Ox2 . Obtener la matriz de giro, y comprobar que no coincide
con la anterior.
z1
z0
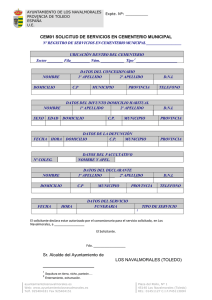
Ejercicio 1.0.3: Una placa rectangular S2 puede
moverse sobre un plano fijo S1 manteniendo un lado
en contacto con el plano. Como coordenadas se tomarán el ángulo ϕ que forma ese lado con el eje O1 x1 ,
y el θ que forma el plano de la placa con el plano fijo
O1 x1 y1 .
Calcular el tensor de giro de los ejes Ox2 y2 z2 ligados
a la placa (ver figura) en función de ϕ y θ.
y2
z2
O1
y0
θ
y1
ϕ
O
x0 ≡ x2
x1
Ejercicio 1.0.4: Una placa plana S2 , a la que se
fija un sistema de referencia Ox2 y2 z2 , está siempre
apoyada en un plano móvil O1 x0 y0 . Este plano puede
girar respecto a unos ejes fijos alrededor el eje común
O1 y1 . Se tomarán como coordenadas el ángulo φ entre O1 x1 y O1 x0 , el ángulo θ entre Ox2 y O1 x0 , y las
coordenadas (ξ, η, 0) de O en ejes S0 .
Obtener la matriz de giro de los ejes S2 ligados
a la placa respecto a los ejes fijos.
Sea M un punto arbitrario de la placa, de coordenadas (a, b, 0) en ejes S2 . Obtener sus coordenadas en ejes fijos.
1
z1
z0
z2
O1
ξ
θ
x1
x0
φ
η
O
x2
y2
y1 ≡ y0
2
CAPÍTULO 1. CINEMÁTICA DEL SÓLIDO: ACTITUD
Ejercicio 1.0.5: El detector de estrellas (star tracker ) es un
instrumento para determinar la actitud de un satélite. Identifica estrellas de dirección conocida en ejes fijos (catálogo de
estrellas), y determina su dirección en ejes sólido.
Un detector ha identificado dos estrellas A y B, de dirección
θ1 , φ1 y θ2 , φ2 en ejes sólido S2 . Esas estrellas tienen direcciones θ1′ , φ′1 y θ2′ , φ′2 en ejes fijos S1 . θ y φ son coordenadas
esféricas (longitud y latitud o, en astronomı́a, ascensión recta
y declinación).
z1
A
⋆
φ
O
Plantear un sistema de ecuaciones del que se pueda obtener la matriz de giro del satélite.
y1
θ
x1
Razonar si las condiciones son suficientes o redundantes.
¿Bastarı́a con detectar una estrella?
Ejercicio 1.0.6: Desde un avión A (sistema asociado S2 ) se detecta otro B, y se quiere
transmitir su posición a un tercero C (sistema asociado S3 ). Por sus sistemas de navegación y
control de actitud, cada avión conoce su vector posición y su matriz de giro respecto a unos ejes
fijos S1 .
A conoce el vector posición AB en sus propios ejes S2 . ¿Qué operaciones tiene que realizar
para transmitirle a C el vector O1 B en ejes fijos?
Con lo que recibe de A, ¿Qué operaciones tiene que realizar C para conocer CB en sus
propios ejes S3 ?
Ejercicio 1.0.7: Sea k0 el vector unitario según Oz de unos ejes ligados a un sólido. Se conocen
sus componentes en ejes fijos S1 , [a, b, c]⊤ . Determinar el ángulo de nutación θ del sólido.
Ejercicio 1.0.8: Sea k0 el vector unitario según Oz de unos ejes ligados a un sólido. Se conocen
sus componentes en ejes fijos S1 , [a, b, c]⊤ . Determinar el ángulo de precesión ψ del sólido.
Ejercicio 1.0.9: Se conocen los versores i0 y k0 de un sólido mediante sus componentes en
ejes fijos, [a, b, c]⊤ y [c, d, e]⊤ . Usando los ángulos clásicos de Euler, razonar un algoritmo que,
mediante productos vectoriales y escalares, permita obtener, en este orden:
El ángulo de nutación θ
El eje de nodos
El ángulo de precesión ψ
El ángulo de rotación propia φ
Ejercicio 1.0.10: En el ejercicio anterior, razonar cómo se puede modificar el algoritmo —
cuando sea necesario— para asignar sin ambigüedades el cuadrante de cada ángulo.
Ejercicio 1.0.11: De un avión se conoce el versor según el eje longitudinal, i0 , mediante sus
componentes en ejes fijos S1 , [a, b, c]⊤ . Determinar el ángulo de asiento θ (pitch) del avión. Se
usan los ángulos de Tait-Bryan.
 0
0