8 Tensiones Inducidas en Máquinas a Anillos
Anuncio

TENSIONES INDUCIDAS
EN MÁQUINAS A ANILLOS
Norberto A. Lemozy
1 INTRODUCCIÓN
El objetivo del presente capítulo es obtener las expresiones de las tensiones inducidas en una
fase de un arrollamiento a anillos, que gira dentro de un campo magnético.
Primero se analiza la tensión inducida en una espira diametral, luego en una espira acortada,
en un grupo de bobinas y en bobinas con sus lados inclinados respecto de la generatriz del
cilindro rotórico, es decir formando una hélice, estos conceptos son generales y pueden aplicarse
a cualquier tipo de arrollamiento.
Luego se calcula el flujo por polo, suponiendo una máquina de entrehierro constante, y se
determinan las tensiones inducidas en una fase completa de un arrollamiento a anillos ubicado en
el rotor y se consideran tres casos:
a) El arrollamiento gira dentro de un campo constante.
b) El arrollamiento gira dentro de un campo rotante.
c) El arrollamiento gira dentro de un campo alterno.
2 TENSIONES INDUCIDAS
Se considera que en el entrehierro de la máquina hay un campo magnético constante en el
tiempo y fijo en el espacio, el que podría estar producido por una corriente continua circulando en
el estator o por imanes permanentes colocados en el mismo.
Si bien en la práctica la distribución de la inducción B en el entrehierro, nunca es
perfectamente sinusoidal, si se hace el análisis armónico de la misma, cada una de las
componentes tiene distribución sinusoidal, por lo tanto es lícito realizar el estudio para este tipo
de distribuciones de campo en el entrehierro y aplicarlo, primero a la componente fundamentas y
luego a las armónicas.
2.1 Una espira diametral
Se estudia una máquina, como la representada en la figura 1, que por sencillez se tomó de
entrehierro constante, con una espira diametral ubicada en el rotor, el que gira con velocidad
angular ωr en radianes eléctricos por segundo. Cabe recordar que se definen los ángulos
eléctricos como:
θ eléctrico = p ⋅ θ geométrico
(1)
Y las velocidades angulares como las derivadas respecto del tiempo de esos ángulos:
ω r [1 s ] = p ⋅ Ω [1 s ] = p
1
2 π n [rpm]
60
(2)
Donde:
p: es el número de pares de polos de la máquina.
Ω: es la velocidad angular en radianes geométricos por segundo [1/s].
n: es la velocidad angular en revoluciones por minuto [rpm].
π
Fig. 1: Espira diametral.
Por comodidad se dibujan y analizan máquinas de un par de polos para que coincidan los
ángulos eléctricos y geométricos, pero si se consideran todos los ángulos, en todas las
expresiones, como ángulos eléctricos, salvo que se diga lo contrario; las conclusiones que se
obtienen son aplicables a máquinas de cualquier polaridad.
Haciendo una representación desarrollada de la espira que se mueve dentro de la componente
fundamental del campo magnético de inducción B [T], se tiene la figura 2.
B
v
B1
e1
e2
Y1 = τ p
θ
B2
e
Fig. 2: Espira diametral moviéndose en el campo magnético.
Como la inducción magnética en el entrehierro es radial y los lados de la espira están
dispuesto según la generatriz del cilindro rotórico, los mismos cortan perpendicularmente a las
líneas de fuerza del campo magnético. Si la longitud activa de dichos lados es l [m], la tensión
inducida en bornes de la espira será:
e = e1 + e2 = 2e1 = 2 Blv
2
(3)
Donde v [m/s] es la velocidad tangencial, que vale:
v = ωr ⋅ r
(4)
Siendo r [m] el radio del cilindro rotórico.
Todas estas tensiones inducidas son alternas y están en fase, ya que los dos lados de la espira
pasan simultáneamente por los ceros y por los máximos del campo magnético. Si se las
representa fasorialemente resultan todos los fasores en fase, como se muestra en la figura 3.
E1
E2
E
π
Fig. 3. Tensiones inducidas en espira diametral.
En este caso la tensión resultante vale:
E& = E& 1 + E& 2 = E& 1 + E& 2
(5)
2.2 Una espira acortada
Si en las condiciones anteriores se acorta la espira, como se muestra en la figura 4, las
tensiones inducidas en sus lados ya no estarán en fase, la tensión inducida en el lado 2 tendrá un
desfase, de la correspondiente al lado 1 en un ángulo (1 − c )π , donde c es el paso relativo:
c=
Y1
τp
<1
(6)
Siendo Y1 el paso de la espira y τp el paso polar.
cπ
(1-c) π
Fig. 4. Espira acortada.
Si se vuelven a representar el entrehierro y la espira en forma desarrollada, figura 5, se puede
ver que cuando el lado 1 alcanzó el máximo de la inducción B, y en consecuencia el máximo de
la tensión inducida, el lado 2 todavía no lo alcanzó, por ese motivo se dice que la tensión 2 está
atrasada de la 1.
3
B
v
B1
e1
e2
Y1 = cτ p
θ
B2
e
Fig. 5. Espira acortada moviéndose en el campo magnético.
Por lo dicho los fasores representativos de las tensiones inducidas tendrán el mismo módulo
(los máximos son iguales, pero ocurren en momentos distintos) pero el fasor E& 2 estará atrasado
un ángulo (1 − c )π , como se muestra en la figura 6.
E1
cπ
A
B
E2
C
E
Fig. 6. Tensiones inducidas en espira acortada.
Como el triángulo que se forma es isósceles, la tensión resultante vale:
π
E& = A B + B C = 2 A B = 2 E&1 sin c
2
(7)
Se define factor de paso kp a la relación de los módulos de la tensión inducida resultante en la
espira acotada respecto a la tensión inducida resultante en la espira diametral:
kp =
E en espira acortada
E en espira diametral
(8)
Donde E = E&1 = E& 2 , reemplazando resulta:
kp =
2 E sin c
π
2 = sin c π
2E
2
(9)
Teniendo en cuenta que un ángulo θ1 para la fundamental, vale ν⋅θ1 para el armónico de
orden ν .
θν = ν ⋅ θ1
(10)
4
La expresión (9) se puede generalizar para un armónico de orden
multiplicando al argumento de la función por el orden del armónico:
k pν = sin cν
π
ν
simplemente
(11)
2
Entonces, cuando se necesita calcular la tensión inducida en una espira acortada, se la calcula
primero como si fuera diametral y luego se la multiplica por el correspondiente factor de paso:
Eν en espira acortada = k pν ⋅ Eν en espira diametral
(12)
Lo mismo vale para la tensión inducida en una bobina.
2.3 Bobinas distribuidas
Sea un grupo de tres (q=3) bobinas diametrales, iguales, separadas un ángulo eléctrico α entre
sí, y conectadas en serie, como se muestra en la figura 7.
α
Nb
Nb
α
Nb
Fig. 7. Tres bobinas diametrales distribuidas.
Como las tres bobinas tienen el mismo número de espiras, sus tensiones inducidas van a tener
el mismo módulo pero van a estar desfasadas un ángulo eléctrico α entre sí, formando un
polígono regular, en este caso de tres lados, como se muestra en la figura 8; donde se agrega una
construcción auxiliar para establecer las relaciones entre las tensiones.
α
E1
E2
α
B
C
A
E
α /2
r
α
α
E3
D
α
O
Fig. 8. Tensiones inducidas en las bobinas distribuidas.
5
En la figura 8 se han trazado las mediatrices (perpendiculares en los puntos medios de los
lados) correspondientes a las tres tensiones, las que se cortan el punto O que es el centro de la
circunferencia circunscripta al polígono o circuncentro. También se han trazado los radios r de
dicha circunferencia.
Los ángulos α de desfase entre las tensiones, son los ángulos exteriores del polígono, los que a
su vez son iguales a los ángulos interiores del mismo. En este ejemplo la suma de los ángulos
interiores resulta 3α , porque son tres bobinas; en general si se tienen q bobinas en serie en el
grupo, la suma de los ángulos interiores sería qα .
El módulo de la tensión resultante E se puede expresar como:
α
E& distribuido = A D = 2 ⋅ A C = 2 ⋅ r sin q
2
(13)
Si las tres bobinas del ejemplo estuvieran superpuestas en las mismas ranuras, sus tensiones
estarían en fase y la resultante sería el triple de la correspondiente a una de las bobinas; en
general si el grupo tiene q bobinas en serie, el módulo de la resultante sería:
α
E& concentrado = q E&1 = q 2 ⋅ A B = q 2 ⋅ r sin
2
(14)
El factor de distribución kd es el cociente de los módulos de las tensiones resultantes con
distribución y sin distribución:
kd =
E& distribuido
E& concentrado
Reemplazando resulta:
kd =
2 ⋅ r sin q
q 2 ⋅ r sin
α
2 =
α
2
(15)
sin q
q sin
α
2
α
(16)
2
Generalizándola para el armónico ν :
k dν =
sin qν
q sinν
α
2
α
(17)
2
Donde, como ya se dijo, q es el número de bobinas del grupo y α es el ángulo eléctrico entre
las mismas.
Entonces, cuando se desea calcular la tensión inducida en un arrollamiento distribuido, se la
calcula primero como si fuera concentrado y luego se la multiplica por el correspondiente factor
de distribución:
Eν distribuido = kdν ⋅ Eν concentrado
6
(18)
2.4 Bobinas helicoidales
En algunas máquinas las ranuras del rotor se inclinan respecto de la generatriz del cilindro que
lo representa, en esos casos las ranuras, y en consecuencia los lados de las bobinas que se
encuentran en las mismas, dejan de ser rectas y se transforman en curvas de doble curvatura: en
hélices cilíndricas de un paso muy grande. Si las ranuras del estator, como es lo habitual, son
rectas en la dirección de las generatrices del mismo, el campo magnético producido por las
bobinas estatóricas mantendrá su simetría axial. En la figura 9 se muestra como una ranura
rotórica, que a la izquierda está enfrentada con una ranura estatórica, en el extremo derecho del
rotor se encuentra girada un ángulo γ respecto de la misma ranura estatórica.
Estator
Rotor
Estator
Rotor
Rotor
γ
Ranura estatórica
Ranura rotórica
Fig. 9. Ranura rotórica inclinada.
Ese ángulo γ es la rotación de la hélice cuando se desplaza una longitud igual al largo del
rotor.
Cuando un conductor rotórico helicoidal se mueve dentro del campo magnético producido por
un estator con ranuras rectas, sus elementos de longitud dl cortan distintos valores de inducción
magnética B. El ángulo eléctrico entre los diferenciales de tensión inducida, correspondientes al
primer y al último elemento conductor, es el ángulo de rotación γ.
El diagrama fasorial correspondiente a los infinitos diferenciales de tensión inducida en el
conductor es un arco de circunferencia cuyo ángulo central es γ y la tensión resultante es la
cuerda, figura 10.
γ
dE
A
E
γ
r
O
Fig. 10. Diagrama fasorial.
7
B
El factor de hélice kh es el cociente de los módulos de las tensiones resultantes con ranuras
helicoidales y con ranuras rectas:
E& con hélice
kh =
E& sin hélice
(19)
La tensión resultante con ranuras helicoidales es la cuerda de la figura 10 que se puede
expresar como:
γ
E& con hélice = ∫ dE& = 2r sin
2
(20)
Mientras que la suma de todos los módulos de los diferenciales de tensión inducida es la
longitud del arco subtendido por el ángulo γ:
E& sin hélice = ∫ dE& = arco =rγ
Reemplazando en la (19) resulta:
kh =
cuerda
=
arco
γ
2r sin
2 =
rγ
γ
γ
2
(22)
2
Que generalizando para un armónico de orden ν:
khν =
sin
(21)
sin ν
ν
γ
γ
2
(23)
2
Entonces, cuando se desea calcular la tensión inducida en un arrollamiento con ranuras
helicoidales, se la calcula primero como si fueran ranuras rectas y luego se la multiplica por el
correspondiente factor de hélice:
Eν con hélice = khν ⋅ Eν sin hélice
(24)
A fin de no cometer un error de cálculo conviene destacar que el ángulo que figura en el
denominador de las expresiones (22) y (23), además de ser un ángulo eléctrico, debe estar
expresado en radianes.
El factor de hélice puede considerarse como un caso límite del factor de distribución en el que:
q→∞
(25)
α →0
lim qα = γ
Además:
(26)
q →∞
α →0
Es decir:
khν = lim
q →∞
α →0
sin qν
q sinν
α
2 =
α
2
8
sin qν
qν
α
α
2
2 =
sinν
ν
γ
2
γ
2
(27)
Cuando los arrollamientos están muy distribuidos, como los de colector, el factor de
distribución se calcula directamente como la relación entre la cuerda y el arco, es decir como si se
tratase de un caso de hélice.
Este factor de hélice no es propio del estator ni del rotor, ya que el ángulo γ se define entre las
ranuras del rotor respecto de las del estator. Si se inclinaran ambas ranuras hacia el mismo lado y
el mismo ángulo, no aparecería el factor de hélice.
Por lo tanto, el factor de hélice, se debe utilizar cuando se estudian las interacciones entre el
estator y el rotor, por ejemplo en el cálculo de las tensiones inducidas en el rotor debidas al
campo producido por el estator, o viceversa, o en el cálculo de la cupla electromagnética y debe
aparecer una sola vez en la productoria de los distintos factores del estator y del rotor. Si en
cambio se estudian las tensiones inducidas en un arrollamiento, debidas al campo producido por
el propio arrollamiento, la hélice, si la hubiera, no produciría ningún efecto.
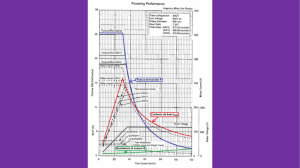
Factor de hélice
La razón por la cual se inclinan las ranuras del rotor, lo que no deja de ser una complicación
constructiva, a fin de que aparezca el factor de hélice, es atenuar armónicos de orden superior. A
modo de ejemplo en la figura 11 se grafica el factor de hélice en función del orden de la
armónica, para un rotor de 24 ranuras, cuatro polos y con valores de rotación de la hélice (arco
rotórico correspondiente al ángulo gama) correspondientes a media, una y una y media ranuras
del rotor.
1
0,8
0,6
0,4
0,2
0
-0,2
-0,4
Media ranura
Una ranura
Ranura y media
0
10
20 30
40 50 60
70 80
Armónico
Fig. 11. Factor de hélice
En la figura 11 se puede observar que cuanto mayor es la inclinación, más rápidamente se
atenúan los armónicos.
9
2.5 Caso general
A fin de conseguir una buena reducción de armónicos, el arrollamiento puede tener bobinas
acortadas, distribuidas y con las ranuras inclinadas, de esa forma se combinan los distintos
efectos y se pueden obtener resultados muy satisfactorios.
En ese caso la tensión resultante se calcula como si el arrollamiento fuera diametral,
concentrado y con ranuras rectas y luego se la multiplica por el producto de los tres factores:
Eν acortado, distribuid o, inclinado = k pν k dν k hν ⋅ Eν diametral, concentrado, recto
(28)
Al producto de los tres factores se lo suele llamar factor del arrollamiento:
k w ν = k pν ⋅ k dν ⋅ k hν
(29)
Si las bobinas del grupo o de la fase poseen distinto número de espiras, si los ángulos α no son
todos iguales, o los grupos poseen distinta cantidad de bobinas, como en los arrollamientos
fraccionarios; las expresiones de los factores dadas más arriba, no son aplicables y se debe
recurrir a otros procedimientos de cálculo. Afortunadamente la mayoría de los arrollamientos se
ajustan a las condiciones estudiadas.
10
3 FLUJO POR POLO
A fin de poder obtener el flujo concatenado por cada fase, y luego la fuerza electromotriz
inducida, primero hay que determinar el flujo por polo. En las mayoría de las máquinas
eléctricas, cuando están en carga, se encuentran presentes dos fuerzas magnetomotrices, por
ejemplo la del estator Fe y la del rotor Fr que, si se considera cada armónica por separado, cada
una de ellas tiene una distribución sinusoidal en el entrehierro y es representable por medio de un
vector en el espacio. En virtud de esa distribución espacial, la fuerza magnetomotriz resultante FR
se puede obtener haciendo la suma vectorial de las mismas aplicando, por ejemplo, la regla del
paralelogramo:
FR = Fe + Fr
(30)
La suma anterior (30) es común hacerla tomando los valores máximos de las fuerzas
magnetomotrices.
En la figura 12 se muestra, en una representación desarrollada, la inducción magnética B1
debida a la componente fundamental de la fuerza magnetomotriz resultante FR1 .
B1
∧
B1
l
0
θ
π
Sp1
τp
Fig. 12. Superficie polar de fundamental.
Donde τp es el paso polar y l es la longitud axial del rotor.
La superficie polar para la fundamental Sp1 corresponde a un sector de la superficie lateral del
cilindro rotórico correspondiente a un paso polar, figura 13.
Si el cilindro rotórico tiene un diámetro medio D, la superficie polar de fundamental se puede
expresar como:
S p1 =
Siendo p el número de pares de polos.
11
π Dl
2p
(31)
Sp
τp
l
D
Fig. 13. Superficie polar en el rotor.
Como la distribución de la inducción es sinusoidal, una forma sencilla de calcular el flujo por
polo es tomando el valor medio de la misma y multiplicándola por la superficie polar:
Bmed1 =
Fˆ
2 ˆ
2
B1 = µ 0 R1
π
π
g
(32)
Donde:
µ 0 = 4π 10 −7 [H/m]
B̂1 es el valor máximo de la componente fundamental de la inducción [T].
FˆR1 es el valor máximo de la fuerza magnetomotriz resultante [A].
g es entrehierro equivalente [m].
El entrehierro equivalente es el entrehierro geométrico multiplicado por los factores de Carter
del estator y del rotor. El entrehierro equivalente, sin ranuras, presenta la misma reluctancia que
el entrehierro real ranurado.
Haciendo el producto se obtienen el flujo por polo para la fundamental:
Φ1 = µ 0
Dl ˆ
FR1 [Wb]
pg
(33)
Si se considera un armónico, por ejemplo el tercero, donde hay un ciclo de la fundamental
habrá tres ciclos de ese tercer armónico, y la superficie de uno de esos polos, se reduce a la
tercera parte de la superficie de un polo de fundamental, figura 14:
En general se puede poner:
S pν =
1 π Dl
ν 2p
(34)
Dl FˆRν
[Wb]
pg ν
(35)
S p1
ν
=
Resultando el flujo por polo:
Φν = µ 0
12
B
∧
B3
l
0
2π
θ1
π
Sp3
τp
Fig. 14. Superficie polar para el tercer armónico.
4 FLUJO CONCATENADO
Todo lo estudiado hasta ahora, tiene un carácter bastante general, lo que sigue está orientado a
los arrollamientos de fases, es decir arrollamientos abiertos con un principio y con un final.
El valor máximo del flujo concatenado por una fase, es decir cuando el eje magnético de la
fase coincide con la dirección del campo magnético, está dado por:
λˆν = N s k wν Φν [Wb]
(36)
Donde kwν es el factor de arrollamiento para el armónico ν definido por la (29) y Ns es el número
de espiras en serie por fase es decir el número de espiras en serie que hay entre los bornes de la
fase. Cuando las fases tienen ramas en paralelo, estas ramas deben ser todas iguales, a fin de
evitar corrientes de circulación entre ellas, ésta es una condición de simetría del arrollamiento y
Ns es el número de espiras de una de esas ramas.
13
5 TENSIONES INDUCIDAS EN UNA FASE
A continuación se estudian las tensiones inducidas en una fase rotórica que gira en un campo
magnético, primero constante, luego rotante y finalmente alterno. Al rotor se lo considera girando
con velocidad angular ωr constante definida por la ecuación (2).
5.1 Fase en campo constante
Como ya se dijo en el párrafo 2 un campo magnético constante es el que tiene amplitud
constante y está fijo respecto al arrollamiento que lo produce, en este caso el campo estatórico
podría estar generado por medio de corriente continua o imanes permanentes. En la figura 15 se
muestra esquemáticamente un rotor cilíndrico bipolar girando dentro de un flujo constante Φ :
Φ = cte.
θ
ωr
Fig. 15. Fase en campo constante.
Si bien el esquema de la figura 15, por sencillez, muestra una máquina bipolar, si se
consideran ángulos eléctricos, las conclusiones que se obtienen, son aplicables a máquinas de
cualquier polaridad. Además se omitió el estator, el que puede ser cilíndrico o de polos salientes
indistintamente, ya que al considerar las componentes armónicas de la inducción en el
entrehierro, las mismas estarán distribuidas en forma cosenoidal en el entrehierro.
El ángulo girado por el rotor será:
θ = ωr t + θ 0
(37)
El ángulo de fase inicial θ 0 está incluido a fin de generalizar la expresión. El flujo
concatenado por la componente fundamental vale:
λ = N s k w Φ cosθ
(38)
La expresión anterior (38) solamente es válida cuando el rotor es cilíndrico ya que si posee
saliencias la variación del flujo concatenado no sería una función coseno del ángulo y el resultado
resultaría aproximado. En realidad esta restricción no es muy limitativa, ya que la mayoría de las
máquinas poseen inducidos cilíndricos.
Para obtener la tensión inducida se aplica la ley de Faraday:
e=
dλ
[V]
dt
Derivando el flujo concatenado, dado por la (38), la componente fundamental queda:
14
(39)
π⎞
⎛
e = ωr N s k w Φ cos ⎜ ωr t + θ 0 + ⎟
2⎠
⎝
(40)
Que es una tensión alterna de pulsación:
ωr = 2π f r
(41)
Cuya amplitud depende de la frecuencia de rotación y su valor eficaz es:
E=
2π
fr N skw Φ
2
(42)
Como tanto la frecuencia como la amplitud dependen de la velocidad de giro, a esta tensión
inducida se la suele denominar de rotación. Este es el tipo de tensión inducida que aparece en las
máquinas sincrónicas.
Si se considera un armónico de flujo de orden ν , por cada vuelta del rotor el mismo encuentra
ν p pares de polos, entonces la frecuencia y la pulsación de la tensión inducida resultarán ν veces
la correspondiente a la fundamental:
f rν = ν ⋅ f r
(43)
La velocidad de rotación en radianes eléctricos por segundo se puede generalizar para el
armónico de orden ν considerando la relación (10) que establece que para los armónicos los
ángulos se deben multiplicar por el orden del armónico. Entonces la relación (1) se puede
generalizar como:
θ eléctrico ν = ν ⋅ θ eléctrico = ν ⋅ p ⋅ θ geométrico
(44)
Que si se la deriva respecto del tiempo, da las respectivas velocidades angulares de rotación:
ω rν = ν ⋅ ω r = ν ⋅ p ⋅ Ω
(45)
Reemplazando en la expresión (40) resulta:
π⎞
⎛
eν = ν ω r N s k wν Φν cos ν ⋅ ⎜ ω r t + θ 0 + ⎟
2⎠
⎝
Cuyo valor eficaz es:
Eν =
2π
ν f r N s k wν Φν
2
(46)
(47)
5.2 Fase en campo giratorio
Cuando por el estator de la máquina circula un sistema polifásico de corrientes, se produce un
campo giratorio en el cual cada componente armónica de la fuerza magnetomotriz, posee
amplitud y velocidad de giro constantes y algunas se pueden anular. A continuación se analiza la
tensión inducida en una fase rotórica, que gira con velocidad angular ωr dentro de un flujo que
rota con velocidad de campo ωc la que, en general y para la fundamental, coincide con la
pulsación de las corrientes que lo están produciendo. Esta situación se muestra esquemáticamente
en la figura 16 donde se tomaron al rotor y al campo girando en el mismo sentido.
15
θ
θc
ωr
Φ
ωc
Fig. 16. Fase en campo giratorio.
Si:
θ = ωr t + θ 0
θ c = ωc t
(48)
El flujo concatenado por la fase será:
λ = N s k w Φ cos(θ c − θ )
λ = N s k w Φ cos[(ωc − ω r )t − θ 0 ]
(49)
La tensión inducida en la fase se obtiene haciendo la derivada respecto del tiempo:
e=
π⎤
dλ
⎡
= (ω c − ω r ) N s k w Φ cos ⎢(ω c − ω r )t − θ 0 + ⎥
dt
2⎦
⎣
(50)
Ésta es una tensión alterna cuya amplitud y cuya frecuencia dependen de la diferencia de
velocidades entre el campo giratorio y la de rotación de la fase. Frecuentemente se utiliza una
variable denominada resbalamiento s definida como:
s=
ωc − ωr
ωc
(51)
Si el rotor gira en sentido opuesto al campo rotante, en las expresiones (49), (50) y (51), las
velocidades angulares se deberán sumar.
La tensión inducida dada por la ecuación (50) se puede poner en función del resbalamiento
como:
π⎞
⎛
e = sω c N s k w Φ cos ⎜ sω c t − θ 0 + ⎟
2⎠
⎝
(52)
De esta forma se puede ver que tanto la amplitud como la frecuencia dependen del
resbalamiento, por ese motivo a esta tensión inducida se suele llamar tensión de resbalamiento y
es la que aparece en los rotores de motores asincrónicos o de inducción.
Como ya se dijo, en la mayoría de los casos, la velocidad de giro del campo de fundamental
coincide con la pulsación de las corrientes que lo producen, es decir:
ωc = ω = 2 π f
(53)
16
Entonces la frecuencia de resbalamiento vale:
s ⋅ ωc
fs =
=
2π
s ⋅ 2π f
2π
= s⋅ f
(54)
Donde se toma el módulo del resbalamiento a fin de no obtener frecuencias negativas. El valor
eficaz de la tensión de resbalamiento (52), resulta:
E=
2π
s ⋅ f N s kwΦ
2
(55)
Como ya se habrá podido apreciar, esta tensión inducida es un caso particular de la tensión
inducida cuando el rotor gira dentro de un campo constante, estudiada en el punto 5.1, y surge de
reemplazar la velocidad de rotación ωr por la velocidad relativa entre el campo y el rotor
ωc - ωr.
Si se tienen en cuenta lo flujos armónicos habrá que considerar sus respectivas velocidades
angulares y sus respectivos sentidos de giro. Si el campo giratorio es producido por un sistema
trifásico balanceado de corrientes hay solamente campos armónicos impares, los múltiplos de
tres se cancelan y las velocidades de giro valen:
ωcν =
ω
ν
(56)
Además los campos armónicos de orden ν = 2 + 3k con k = 0; 1; 2… giran en sentido opuesto
al de fundamental.
Se puede definir un resbalamiento para cada armónico haciendo:
sν =
Ω cν ± Ω ncν ± n ω cν ± ω r ω ± ω rν
=
=
=
Ω cν
ncν
ω cν
ω
(57)
Correspondiendo el signo menos del numerador al caso en que el rotor y el campo rotante giran
en el mismo sentido, como en la figura 16, y el signo más al caso contrario.
Las relaciones entre las velocidades angulares ω ; Ω y n son las dadas por la ecuación (2) y
además:
Ω cν =
ncν =
ω cν
p
=
ω
νp
(58)
60 f
νp
(59)
Con las salvedades hechas más arriba respecto a las componentes que se anulan y las que rotan
en sentido contrario. En todas las expresiones el número de pares de polos p es el que le
corresponde a la componente fundamental del campo. La frecuencia de resbalamiento dada por la
ecuación (54) se puede generalizar para las armónicas poniendo:
f sν = sν ⋅ f
(60)
Por lo expuesto, la tensión inducida por los armónicos del campo giratorio resulta:
17
π⎞
⎛
eν = ν ⋅ sν ω cν N s k wν Φν cos ν ⋅ ⎜ sν ω cν t − θ 0 + ⎟
2⎠
⎝
(61)
Cuando el campo giratorio está producido por un sistema polifásico de corrientes, y de
acuerdo a la ecuación 56, resulta:
ν ⋅ ω cν = ω = 2π f
(62)
Igual a la pulsación de las corrientes. El valor eficaz de la tensión (61) es:
Eν =
2π
sν ⋅ f N s k wν Φν
2
(63)
5.3 Fase en campo alterno
Si el arrollamiento estatórico está recorrido por una corriente alterna monofásica, la fuerza
magnetomotriz y el campo magnético que se desarrollan serán alternos: es decir sus amplitudes
dependerán del valor instantáneo de la corriente, que se supone perfectamente sinusoidal, y
estarán fijos respecto al arrollamiento inductor; por lo tanto el valor instantáneo del flujo por polo
será:
φ = Φ máx sin ω t
(64)
Donde la pulsación del flujo es la de la corriente que lo está produciendo y vale:
ω = 2π f
(65)
En la figura 17 se muestra esta situación.
φ = Φ máx sen ω t
θ
ωr
Fig. 17. Fase en campo alterno.
Igual que en los casos anteriores, el ángulo θ está dado por la expresión (37); y el flujo
concatenado por toda la fase rotórica será:
λ = N s k w Φ máx sin ω t ⋅ cos(ω r t + θ 0 )
(66)
Aplicando la ley de Faraday (39) se obtiene la tensión inducida en la fase rotórica, la que
posee dos términos:
e=
dλ
= ω N s k w Φ máx cos ω t ⋅ cos(ω r t + θ 0 ) −
dt
− ω r N s k w Φ máx sin ω t ⋅ sin (ω r t + θ 0 )
18
(67)
Para interpretar más fácilmente la expresión anterior (67), conviene desarrollar los productos
de funciones trigonométricas de acuerdo a las siguientes igualdades:
1
[cos(α − β ) + cos(α + β )]
2
1
sin α ⋅ sin β = [cos(α − β ) − cos(α + β )]
2
cos α ⋅ cos β =
(68)
Resultando:
1
{cos[(ω − ω r ) t − θ 0 ] + cos[(ω + ω r ) t + θ 0 ]} −
2
1
− ω r N s k w Φ máx {cos[(ω − ω r ) t − θ 0 ] − cos[(ω + ω r ) t + θ 0 ]}
2
e = ω N s k w Φ máx
(69)
Ordenándola queda:
ω + ωr
N s k w Φ máx cos[(ω + ω r ) t + θ 0 ] +
2
ω − ωr
+
N s k w Φ máx cos[(ω − ω r ) t − θ 0 ]
2
e=
(70)
En la expresión anterior (70) se puede ver que la tensión inducida es alterna y posee dos
componentes: una de las cuales tiene amplitud y frecuencia proporcionales a la suma y la otra
proporcional a la diferencia de las pulsaciones de la excitación ω y de rotación ωr , por tal motivo
suele llamarse “biarmónica”.
En la figura 18 se muestra un ejemplo de una tensión biarmónica en la que ω = 300 1/s y
ωr = 250 1/s.
Este tipo de tensión inducida y las corrientes por ella producidas, se encuentran presentes en
los rotores de los motores de inducción monofásicos.
Si ωr = ω, es decir el rotor gira a velocidad sincrónica, la componente diferencia de la tensión
inducida, se anula y solamente queda la componente suma, con una frecuencia igual al doble de
la del flujo alterno que la está produciendo, normalmente el doble de la frecuencia de red,
ecuación (71).
Si ωr = 0 la tensión inducida solamente posee una componente de la frecuencia con la que
pulsa el flujo y la amplitud de la misma depende del coseno del ángulo θ0 , ecuación (72), cuando
éste ángulo vale cero, hay máximo acoplamiento y la tensión es máxima. La máquina se
comporta como un transformador de acoplamiento variable.
Si ωr = ω :
e = ω N s k w Φ máx cos(2ω t + θ 0 )
(71)
Si ωr = 0 :
e = ω N s k w Φ máx cos θ 0 cos ω t
(72)
Los valores eficaces de cada una de las componentes de la (70) serán:
19
E+ =
E− =
π
2
π
2
(f
+ f r ) N s k w Φ máx
(f
− f r ) N s k w Φ máx
(73)
e
0
0,025
0,05
0,075
0,1
0,125
0,15
0,175
Tiempo [s]
Fig. 18. Tensión biarmónica.
Donde las frecuencias fr y f son las que resultan de las ecuaciones (41) y (65). El valor eficaz de
toda la tensión biarmónica (70) se puede determinar como en el caso de una poliarmónica:
E=
(E ) + (E )
+ 2
− 2
(73)
Una justificación más fenomenológica del por qué se produce una tensión inducida con dos
componentes se puede realizar en base al teorema de Leblanc. Figura 19.
φ = Φ máx sen ω t
ωr
Φ máx
2
ω
ω
Φ máx
2
Fig. 19. Teorema de Leblac.
En efecto, de acuerdo a dicho teorema, un campo alterno se puede descomponer en dos
campos giratorios, de amplitud igual a la mitad del máximo del alterno, que rotan a velocidad
sincrónica ω y en sentidos opuestos. Por lo tanto se puede considerar que la tensión inducida es la
suma de dos tensiones de resbalamiento: una debida la campo que gira en mismo sentido que el
rotor, dando una amplitud y una frecuencia proporcionales a la diferencia de velocidades; y otra
20
debida al campo que gira en sentido opuesto al rotor, dando una amplitud y una frecuencia
proporcionales a la suma de las velocidades.
Si se consideran las componentes armónicas de flujo que genera el arrollamiento, cada una de
ellas pulsará de la misma forma que lo hace la corriente es decir con ω , es decir:
φν = Φ máxν sin ω t
(75)
Mientras que los ángulos en el entrehierro y, consecuentemente la velocidad angular de
rotación, se verán multiplicados por el orden del armónico, ecuaciones (44) y (45). Por lo tanto el
flujo concatenado por la fase resultará:
λν = N s k wν Φ máxν sin ω t ⋅ cos ν ⋅ (ω r t + θ 0 )
(76)
Haciendo la derivada de esta expresión y ordenando los términos, como se hizo para la
componente fundamental, se llega a:
ω + νω r
N s k wν Φ máxν cos[(ω + νω r ) t + νθ 0 ] +
2
ω −νω r
+
N s k wν Φ máxν cos[(ω −νω r ) t −νθ 0 ]
2
eν =
(77)
Expresión a la que también se puede llegar aplicando el teorema de Leblanc.
6 BIBLIOGRAFÍA
Manuel Cortés Cherta: “Curso Moderno de Máquinas Eléctricas Rotativas” Tomo I La
máquina Eléctrica en General. Editores Técnicos Asociados S. A., 1970.
M. P. Kostenko y L. M. Piotrovski: “Máquinas Eléctricas” Volumen II, Montaner y Simon S.
A., 1968.
Michael Liwshitz-Garik y Clyde C. Whipple: “Máquinas de Corriente alterna” Compañía
Editorial Continental CECSA, 1971.
Alexander S. Langsdorf: “Teoría de las Máquinas de Corriente Alterna” Editorial Mac. Graw
Hill, México, 1967.
Clifford B. Gray: “Máquinas Eléctricas” Ediciones Alfaomega, México, 1993.
Stephen J. Chapman: “Máquinas Eléctricas” Mac. Graw Hill Interamericana, cuarta edición,
2005.
John Hindmarsch: “Máquinas Eléctricas y sus Aplicaciones” Urmo S. A. de Ediciones, 1975.
Luis S. Iribarnegaray: “Fundamentos de Máquinas Eléctricas Rotativas” Marcombo Editores,
1989.
Leander W. Matsch: “Máquinas Electromagnéticas y Electromecánicas” Representaciones y
Servicios de Ingeniería S. A. México1972.
Norberto A. Lemozy: “Fuerzas Magnetomotrices en Arrollamientos a Anillos” Apuntes de
Cátedra, 2007.
Norberto A. Lemozy, agosto de 2008
21