INTRODUCCION AL METODO DE LOS ELEMENTOS FINITOS
Anuncio

INTRODUCCION
AL
METODO
DE
LOS
ELEMENTOS
FINITOS:
APLICACIÓN A LA MECANICA DE SÓLIDOS
El Método de los Elementos Finitos es un método numérico de resolución de problemas
de Mecánica de Sólidos que resulta de gran importancia por su utilidad práctica. Es una
herramienta de cálculo muy potente que permite al ingeniero estructuralista resolver
infinidad de problemas. Sin embargo, es un método que no proporciona la solución
“exacta” a un problema dado, sino que, en realidad, posibilita obtener una solución
aproximada que, con el juicio ingenieril que se le supone al calculista, puede ser más
que suficiente para la resolución de un problema práctico.
Su idea básica no puede ser más sencilla: dado un sólido, sometido a un sistema de
cargas y coaccionado por unas ligaduras, el método consiste en subdividir el sólido en
pequeñas partes (elementos) interconectadas entre sí a través de los nudos de los
elementos, de manera que suponemos que, el campo de desplazamientos en el interior
de cada elemento, puede expresarse en función de los desplazamientos que sufren los
nudos del elemento (desplazamientos nodales); posteriormente, se podrá determinar la
matriz de rigidez de cada elemento, las cuales una vez ensambladas (siguiendo los pasos
del análisis matricial de estructuras), permitirán la obtención de los desplazamientos en
los nudos de cada elemento. De esa manera, una vez conocidos dichos desplazamientos,
podríamos determinar, de una forma aproximada como ya se dijo antes, las tensiones y
las deformaciones en el interior del elemento.
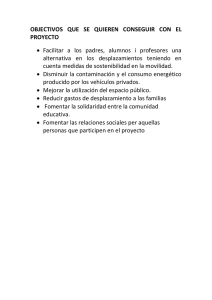
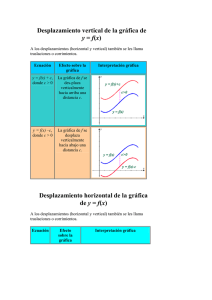
Veamos con un ejemplo lo dicho anteriormente. Supongamos el problema de la Figura
1, que corresponde a un problema de una placa de dimensiones finitas, sometida a
tracción en sus lados superior e inferior, y que posee un agujero circular, de un
determinado radio, en su centro.
FIGURA 1
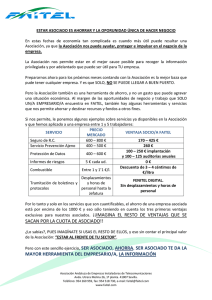
Una modelización por elementos finitos de este problema, empleando elementos
triangulares por ejemplo, podría ser la representada en la Figura 2, en la que se
representa la malla de un modelo que podría utilizarse para la resolución del problema.
FIGURA 2
Como vemos en dicha figura, la placa ha sido subdividida en elementos triangulares, de
forma que estos elementos se suponen interconectados a través de sus vértices.
Evidentemente, dado el número de elementos que hemos utilizado, el agujero circular
de la realidad, por ejemplo, ya no es circular en nuestro modelo sino que es un
dodecágono.
Las consideraciones hechas conducen a que, irremisiblemente, la solución que vamos a
obtener es una aproximación a la solución real del problema de la Figura 1 pero, muchas
veces, en la aplicación práctica en ingeniería estructural, esto puede ser más que
suficiente. No obstante, podríamos haber “refinado” la malla anterior reduciendo el
tamaño de los elementos, y por tanto aumentando el número de ellos, lo que hubiese
permitido modelizar mejor la geometría del agujero central de la placa, y así obtener
una solución que, aunque siguiera siendo aproximada, resultara más próxima a la
realidad.
Todo lo anterior, nos ilustra sobre las posibilidades del método, que no sólo se imita a
caso bidimensionales sino que, también, permite analizar problemas tridimensionales:
podemos analizar cualquier pieza de cualquier geometría, obteniendo el campo tensodeformacional en su interior, y así luego poder comprobar que la pieza analizada
cumple con los requisitos estructurales que esperábamos de ella.
En general, en un problema a analizar por el Método de los Elementos Finitos,
conoceremos las fuerzas exteriores aplicadas en algunos de sus nudos y los valores de
los desplazamientos en otros (dependiendo de las ligaduras que posea el sólido). La
clave del método está en que, tras su aplicación, obtendremos una expresión del tipo:
{F } = [K ]{u}
(1)
en la que, {F } es un vector columna, conocido como vector de cargas, en el que están
todas las fuerzas exteriores (las directamente aplicadas y las reacciones producidas por
las ligaduras) que actúan sobre el sólido; en el miembro de la derecha nos encontramos
al vector {u}, denominado vector de desplazamientos nodales, que representa, de
manera ordenada, todos los desplazamientos que experimentan los nudos del modelo, y
[ ]
la matriz K , que se conoce como matriz de rigidez del sistema estructural y, cuya
formación constituye el “corazón” de este método. Al igual que sucedía con la técnica
convencional del análisis matricial de estructuras, del vector de cargas conoceremos sus
componentes correspondientes a las cargas directamente aplicadas al sólido pero, en
general, no conoceremos las cargas de reacción que aparecen como consecuencia de las
ligaduras existentes. Del vector de desplazamientos nodales no conoceremos muchas de
sus componentes aunque sí algunas que resultan consecuencia directa de las ligaduras
que existan.
[ ]
Lógicamente, si se dispone de la matriz K , el hacer un nuevo análisis del sólido con
otro tipo de cargas, por ejemplo, en la hipótesis de que se mantiene su misma geometría
y las propiedades del material del que está realizado, es muy sencillo, pues sólo es
necesario cambiar los vectores {F } y {u}.
Un paso previo, para comprender este método, es analizar el significado físico de la
[ ]
matriz K , para lo que es conveniente estudiar el comportamiento de una barra,
articulada en sus extremos (la barra sólo trabaja a esfuerzos axiles) y del conjunto de un
sistema de barras articuladas entre sí (estructura articulada). Veamos cómo proceder.
El elemento finito lineal (barra biarticulada): planteamiento en coordenadas
cartesianas y obtención de su matriz de rigidez
En este apartado vamos a obtener la matriz de rigidez, en ejes locales, de una barra
biarticulada pero, ahora, utilizando las ideas básicas del Método de los Elementos
Finitos. Se trata, más bien, de un ejemplo de cómo se procede en este método porque,
en realidad, la matriz de rigidez que vamos buscando ya la hemos obtenido utilizando
conceptos de Resistencia de Materiales.
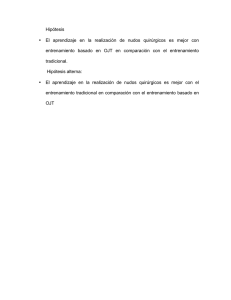
Consideremos el elemento barra de la Figura 10, que se encuentra definido por sus
nudos 1 y 2 y que sólo se puede encontrar sometido a la acción de fuerzas en su
dirección x (sería equivalente a identificar la barra con una barra biarticulada) actuando
sobre los nudos. Posee una longitud L y un área de su sección transversal de valor A.
Definamos en él un sistema de referencia cartesiano cuyo eje x coincide con el de la
barra de manera que la coordenadas de sus nudos son x1 y x2.
x2
x1
1
L
x
2
FIGURA 10
Denominemos u1 y u2 a los desplazamientos, según el eje x, que experimentan sus
nudos y admitamos que el campo de desplazamientos, en el interior del elemento, lo
aproximamos como:
u ( x ) = α 0 + α1 x
(34)
donde las dos constantes α0 y α1 son desconocidas aunque las podríamos obtener
imponiendo que cuando x=x1, u(x1)=u1 y que cuando x=x2, u(x2)=u2. Es decir:
u1 = α 0 + α1 x1
(35)
u 2 = α 0 + α1 x2
ó, expresada en forma matricial,
⎧u1 ⎫
⎨ ⎬ = [α 0
⎩u 2 ⎭
⎡1 x1 ⎤
α1 ]⎢
⎥
⎣1 x2 ⎦
(36)
La ecuación anterior es un sistema de dos ecuaciones con dos incógnitas, en este caso.
Su solución proporcionaría:
α0 =
x2 u1 − x1u 2
x2 − x1
(37)
u − u1
α1 = 2
x2 − x1
y, por tanto:
u (x ) =
u 2 − u1
x + u1 = [α 0
L
⎧1 ⎫
α1 ]⎨ ⎬
⎩ x⎭
(38)
Conviene hacer una precisión importante para, luego, poder comprobar la importancia
del uso de los elementos isoparamétricos que, posteriormente, veremos: para determinar
el campo de desplazamientos dentro del elemento (para lo que es necesario determinar
los coeficientes α0 y α1) hemos tenido que resolver un sistema de ecuaciones. Esto
puede no parecer una cosa importante, sobre todo cuando se está analizando este
elemento, pero cuando se desarrollen elementos finitos con muchos más grados de
libertad, y teniendo en cuenta que el proceso de resolución para la obtención de los
coeficientes de las funciones de forma habría que hacerlo para todos y cada uno de los
elementos de la malla, se puede convertir en un esfuerzo de cálculo importante. Esta
dificultad la soslayan los elementos finitos isoparamétricos, como ya se verá.
El campo de desplazamientos satisface que, cuando x=x1, u(x1)=u1 y que cuando x=x2,
u(x2)=u2. El campo de deformaciones dentro del elemento lo podremos obtener a partir
del campo de desplazamientos como:
ε=
⎧u ⎫
∂u u 2 − u1 1
=
= [− 1 1]⎨ 1 ⎬
∂x
L
L
⎩u 2 ⎭
(39)
que, como se observa, es constante a lo largo de todo el elemento. La tensión dentro del
mismo se podría obtener a partir de la deformación utilizando la ley de Hooke:
σ = Eε = E
⎧u ⎫
u 2 − u1 E
= [− 1 1]⎨ 1 ⎬
L
L
⎩u 2 ⎭
(40)
Supongamos que, sobre los nudos 1 y 2 actúan, respectivamente, la fuerzas F1 y F2 (que
sabemos que deben ser iguales y opuestas pero, que para la obtención de la matriz de
rigidez, nos conviene considerar dos fuerzas cualesquiera actuando en los nudos) y que
suponemos que imponemos a la barra sufre unos desplazamientos virtuales
(desplazamientos físicamente posibles aunque no tienen porqué producirse en la
realidad), que denotaremos por uδ (x) de manera que uδ(x1)=uδ1, uδ(x2)=uδ2 . El campo
de desplazamientos en el interior del elemento cumplirá que:
u δ (x ) =
u 2δ − u1δ
x + u1δ
L
(41)
Este campo de desplazamientos virtuales proporciona el siguiente campo de
deformaciones virtuales:
⎧u1δ ⎫
∂u δ u 2δ − u1δ 1
ε =
=
= [− 1 1]⎨ δ ⎬
L
L
∂x
⎩u 2 ⎭
δ
(42)
Las tensiones reales (aunque en este caso es una tensión constante) que aparecen en la
barra, no cuando se aplican los desplazamientos virtuales sino la que existe en ella como
consecuencia de los desplazamientos verdaderos que sufren sus nudos u1 y u2 como
consecuencia de las fuerzas que actúan sobre la barra, se pueden obtener como:
σ = E ⋅ε =
⎧u ⎫
E
[− 1 1]⎨ 1 ⎬
L
⎩u 2 ⎭
(43)
El Principio de los Trabajos Virtuales, cuya formulación se estudió en Elasticidad,
establece que el trabajo realizado por las cargas reales existentes una vez que sus puntos
de aplicación experimentan los desplazamientos virtuales impuestos:
⎧u1δ ⎫
F1 ⋅ u + F2 ⋅ u = [F ] ⎨ δ ⎬
⎩u 2 ⎭
δ
1
δ
2
T
(44)
tiene que ser igual al trabajo que realizan las tensiones que, verdaderamente, se
producen en la barra, cuando ésta experimenta las deformaciones virtuales consecuencia
de los desplazamiento virtuales impuestos, y que sería:
∫ σ ⋅ ε dV = ∫x = x [u1
x = x2
δ
1
⎧u1δ ⎫
⎧− 1⎫ E 1
u 2 ]⎨ ⎬ ⋅ [− 1 1]⎨ δ ⎬ ⋅A ⋅ dx
⎩1 ⎭L L
⎩u 2 ⎭
(45)
Nótese que ninguna de las magnitudes del integrando depende de x, por lo que:
∫ σ ⋅ ε dV =[u1
δ
⎧u1δ ⎫
⎧− 1⎫ E 1
u 2 ]⎨ ⎬ ⋅ [− 1 1]⎨ δ ⎬ ⋅ A ⋅ L
⎩1 ⎭L L
⎩u 2 ⎭
(46)
puesto que:
x = x2
∫x = x dx = L
(47)
1
Por tanto:
∫ σ ⋅ ε dV =[u1
δ
⎧u1δ ⎫
EA ⎧− 1⎫
u2 ]
⎨ ⎬[− 1 1]⎨ δ ⎬ = [u1
L ⎩1⎭
⎩u 2 ⎭
δ
EA ⎡ 1 − 1⎤ ⎧u1 ⎫
u2 ]
⎨ ⎬
L ⎢⎣− 1 1 ⎥⎦ ⎩u 2δ ⎭
(48)
Igualando el trabajo de las fuerzas exteriores con el realizado por las fuerzas internas,
llegamos a que:
δ
EA ⎡ 1 − 1⎤ ⎧u1 ⎫
u2 ] ⎢
⎨ ⎬
L ⎣− 1 1 ⎥⎦ ⎩u 2δ ⎭
⎧u1δ ⎫
F2 ]⎨ δ ⎬ = [u1
⎩u 2 ⎭
[F
1
(49)
Como esta igualdad debe cumplirse independientemente de los desplazamientos
virtuales impuestos (uδ1 y uδ2), se tendrá que cumplir que:
[F
F2 ] = [u1
1
u2 ]
EA ⎡ 1 − 1⎤
L ⎢⎣− 1 1 ⎥⎦
(50)
Que podemos expresar, transponiendo los dos miembros de la ecuación, como:
⎧ F1 ⎫ EA ⎡ 1 − 1⎤ ⎧u1 ⎫
⎨ ⎬=
⎢
⎥⎨ ⎬
⎩ F2 ⎭ L ⎣− 1 1 ⎦ ⎩u 2 ⎭
(51)
lo que nos conduce a afirmar que la matriz de rigidez del elemento es:
− 1⎤
L ⎣− 1 1 ⎥⎦
[K ] = EA ⎡⎢ 1
e
(52)
como ya sabíamos.
Cabe preguntarse, para qué hacer así las cosas cuando podríamos haber establecido la
matriz de rigidez de una barra biarticulada de forma mucho más directa. La razón es
muy simple: hemos seguido todo el procedimiento para formar una matriz de rigidez de
un elemento siguiendo la filosofía básica del método de los elementos finitos.
Repasemos qué hemos hecho en realidad para obtener la matriz de rigidez de este
elemento tan simple:
1) Hemos supuesto (en realidad, hemos realizado una aproximación) que el campo
de desplazamientos en cualquier punto del elemento tiene la expresión
matemática: u ( x ) = α 0 + α1 x , donde los parámetros α0 y α1 son desconocidos.
Nótese que el tipo de aproximación del campo de desplazamientos tiene dos
constantes a determinar: α0 y α1 y que el número de grados de libertad de este
elemento es también de dos (cada uno de los desplazamientos nodales constituye
un grado de libertad.
2) Obligando a que, cuando x=x1, u(x1)=u1 y cuando x=x2, u(x2)=u2 hemos podido,
resolviendo un sistema de ecuaciones algebraicas (en este caso de dos
ecuaciones con dos incógnitas) obtener los parámetros α0 y α1 en función de los
desplazamientos que experimentan los nudos de la barra, u1 y u2, y de las
coordenadas de los mismos x1 y x2. Si hubiésemos elegido un polinomio con un
mayor número de constantes αi, y por tanto de un grado superior a la unidad, no
podríamos haberlas determinado puesto que sólo podemos imponer las dos
condiciones que hemos dicho para su determinación.
3) Hemos obtenido las deformaciones dentro de la barra a partir de derivar los
desplazamientos en la misma pero como estos, a su vez han sido expresados en
función de los desplazamientos de los nudos de la barra, al final del proceso las
deformaciones
también
quedan
expresadas
en
función
de
dichos
desplazamientos nodales mediante la ecuación:
ε=
⎧u ⎫
∂u u 2 − u1 1
=
= [− 1 1]⎨ 1 ⎬
L
L
∂x
⎩u 2 ⎭
4) Conocidas las deformaciones, hemos obtenido las tensiones en la barra
utilizando la ecuación constitutiva del material de la misma (en este caso era la
ley de Hooke), y, como las deformaciones dependían de los desplazamientos
nodales, las tensión también lo harán. Es decir, hemos considerado que:
σ = Eε = E ⋅
u
1
[− 1 1]⎧⎨ 1 ⎫⎬
L
⎩u 2 ⎭
5) Aplicando el Principio de los trabajos virtuales, hemos conseguido relacionar las
fuerzas actuantes en los nudos con los desplazamientos de estos a través de la
matriz de rigidez del elemento. En definitiva:
⎧ F1 ⎫ EA ⎡ 1 − 1⎤ ⎧u1 ⎫
⎨ ⎬=
⎢
⎥⎨ ⎬
⎩ F2 ⎭ L ⎣− 1 1 ⎦ ⎩u 2 ⎭
Elemento finito triangular de deformación constante: Matriz de rigidez
Cabría preguntarse si todo los que hemos visto sobre la matriz de rigidez puede ser
aplicado a situaciones más complejas. Si fuéramos capaces de dividir un sólido,
considerado éste como un medio continuo, en elementos de manera que lográsemos,
para cada uno de ellos, una expresión similar a la de la ecuación (1), podríamos pensar
en seguir las mismas pautas que hemos seguido en el problema precedente para resolver
problemas de Elasticidad mucho más complicados.
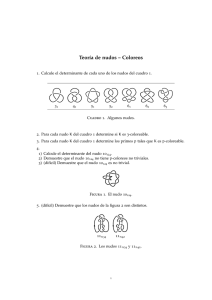
Para ello, supongamos el elemento triangular de la Figura 11, que supondremos que
trabaja en tensión plana, y que puede ayudarnos para resolver problemas de sólidos
bidimensionales como el que hemos considerado en las Figuras (1) y (2). Vamos a
emplear, como sistema de referencia global del elemento el formado por los ejes x-y de
la figura.
(F3)y , (u3)y
3
y
(F3)x , (u3)x
(F2)y , (u2)y
(F1)y , (u1)y
2
1
(F2)x , (u2)x
(F1)x , (u1)x
x
FIGURA 11
Para dicho elemento, hemos dibujado su geometría, numerado sus nudos de acuerdo a
un sentido prefijado (antihorario, en este caso) y hemos dibujado las componentes en
los ejes cartesianos de las fuerzas y desplazamientos en cada uno de los nudos.
Vamos a realizar una hipótesis importante: los desplazamientos de los puntos del
interior del elemento pueden aproximarse mediante funciones lineales de sus
coordenadas.
Llamando u(x,y) y v(x,y) a las componentes del desplazamiento en un punto genérico
(x,y) del elemento según los ejes coordenados, la hipótesis anterior sobre el campo de
desplazamientos se traduce en que:
u (x , y ) = u = α 1 + α 2 x + α 3 y
v(x , y ) = v = α 4 + α 5 x + α 6 y
(53)
donde ignoramos, por el momento, el valor de los coeficientes αi (i=1…6) que aparecen
en la Ecuación (53). Aproximado (porque no es, exactamente, el real) de esta forma el
campo de desplazamientos en el interior del elemento (Ecuación (53)), el campo de
deformaciones en su interior podría determinarse de la manera siguiente:
∂u
= α2
∂x
∂v
= α6
εy =
∂y
εx =
γ xy =
(54)
∂v ∂u
= α5 + α3
+
∂x ∂y
Como se observa, el haber supuesto un campo de desplazamientos lineal en x e y nos ha
conducido a que, el campo de deformaciones en el interior del elemento sea constante e
independiente, por tanto del punto concreto del elemento que consideremos. Este
elemento finito que estamos describiendo (en el que las funciones de interpolación son
polinomios de primer grado en x y en y) recibe el nombre de elemento triangular de
deformación constante (Constant Strain Triangle en inglés o, simplemente, elemento
CST) ó, también, elemento triangular lineal puesto que las funciones de interpolación de
los desplazamientos en el interior del elemento son funciones lineales de las
coordenadas del punto que estemos considerando. Utilizando las ecuaciones
constitutivas del material puede deducirse el campo tensional en el interior del
elemento:
E
(ε x + νε y ) = E 2 (α 2 + να 6 )
2
1− ν
1− ν
E
(ε y + νε x ) = E 2 (α 6 + να 2 )
σy =
2
1− ν
1− ν
E
E
(α 5 + α 3 )
τ xy =
γ xy =
2(1 + ν )
2(1 + ν )
σx =
(55)
que, como se observa, corresponde a un estado de tensión constante dentro del
elemento.
Un primer problema que surge es cómo determinar los coeficientes de los polinomios
que aparecían en la ecuación (53). Para ello, podemos hacer la siguiente consideración:
en los nudos del elemento (es decir, cuando particularicemos las coordenadas x e y para
los nudos) dichos desplazamientos deben coincidir con los desplazamientos nodales que
el elemento va a sufrir. Si las coordenadas de los nudos fueran: del nudo 1, (x1,y1); del 2,
(x2,y2) y del 3, (x3,y3), se tendría que:
u1 = α1 + α 2 x1 + α 3 y1
v1 = α 4 + α 5 x1 + α 6 y1
u 2 = α1 + α 2 x2 + α 3 y 2
(56)
v2 = α 4 + α 5 x2 + α 6 y 2
u 3 = α 1 + α 2 x3 + α 3 y 3
v3 = α 4 + α 5 x3 + α 6 y 3
Estas ecuaciones escritas en forma matricial quedarían como:
⎧u1 ⎫ ⎡1 x1
⎪ v ⎪ ⎢0 0
⎪ 1⎪ ⎢
⎪u 2 ⎪ ⎢1 x2
⎨ ⎬=⎢
⎪ v 2 ⎪ ⎢0 0
⎪u3 ⎪ ⎢1 x3
⎪ ⎪ ⎢
⎩ v3 ⎭ ⎣0 0
Llamando:
y1
0
y2
0
1
0
0
y3
0
1 x2
0 0
1 x3
0
x1
0
0 ⎤ ⎧ α1 ⎫
y1 ⎥⎥ ⎪⎪α 2 ⎪⎪
0 ⎥ ⎪α 3 ⎪
⎥⎨ ⎬
y 2 ⎥ ⎪α 4 ⎪
0 ⎥ ⎪α 5 ⎪
⎥⎪ ⎪
y3 ⎦ ⎩α 6 ⎭
(57)
⎧ u1 ⎫
⎪v ⎪
⎪ 1⎪
⎪u ⎪
{u} = ⎨ 2 ⎬
⎪v 2 ⎪
⎪u 3 ⎪
⎪ ⎪
⎩ v3 ⎭
⎡1 x1
⎢0 0
⎢
⎢1 x
[C ] = ⎢ 2
⎢0 0
⎢1 x3
⎢
⎣0 0
y1
0
y2
0
y3
0
0 0
1 x1
0 0
1 x2
0 0
1 x3
0⎤
y1 ⎥⎥
0⎥
⎥
y2 ⎥
0⎥
⎥
y3 ⎦
⎧α1 ⎫
⎪α ⎪
⎪ 2⎪
⎪α ⎪
y {α} = ⎨ 3 ⎬
⎪α 4 ⎪
⎪α 5 ⎪
⎪ ⎪
⎩α 6 ⎭
(58)
la ecuación (58) podría escribirse como:
{u} = [C ]{α}
(59)
El vector {u}, en esta técnica de los Elementos Finitos, recibe el nombre de vector
desplazamientos nodales.
De la ecuación (59) se pueden deducir los valores de los parámetros buscados:
{α} = [C ] {u}
−1
(60)
donde la matriz [C ]−1 sería:
[C ]
−1
⎡a1
⎢b
⎢ 1
1 ⎢ c1
=
⎢
2a ⎢ 0
⎢0
⎢
⎣0
0
0
0
a2
b2
c2
0
0
0
a3
b3
c3
a1
b1
c1
0
0
0
a2
b2
c2
0
0
0
0⎤
0 ⎥⎥
0⎥
⎥
a3 ⎥
b3 ⎥
⎥
c3 ⎦
(61)
siendo:
a1 = x2 y3 − x3 y 2
a2 = x3 y1 − x1 y3
a3 = x1 y 2 − x2 y1
b1 = y 2 − y3
b2 = y3 − y1
b3 = y1 − y 2
c1 = x3 − x2
c2 = x1 − x3
c3 = x2 − x1
2a = a1 + a 2 + a3
Las deformaciones (ecuación (55)) pueden expresarse como:
(62)
⎧α1 ⎫
⎪α ⎪
⎧ ε x ⎫ ⎡0 1 0 0 0 0 ⎤ ⎪ 2 ⎪
⎪ ⎪ ⎢
⎥ ⎪α 3 ⎪
ε
=
0
0
0
0
0
0
⎨ y⎬ ⎢
⎥⎨ ⎬
⎪γ ⎪ ⎢0 0 1 0 1 0⎥ ⎪α 4 ⎪
⎦ ⎪α ⎪
⎩ xy ⎭ ⎣
5
⎪ ⎪
⎩α 6 ⎭
(63)
Llamando:
⎧εx ⎫
{ε} = ⎪⎨ ε y ⎪⎬
⎪γ ⎪
⎩ xy ⎭
⎡0 1 0 0 0 0 ⎤
[H ] = ⎢⎢0 0 0 0 0 0⎥⎥
⎢⎣0 0 1 0 1 0⎥⎦
⎧α1 ⎫
⎪α ⎪
⎪ 2⎪
⎪α ⎪
{α} = ⎨ 3 ⎬
⎪α 4 ⎪
⎪α 5 ⎪
⎪ ⎪
⎩α 6 ⎭
(64)
la Ecuación (64) puede escribirse:
{ε} = [H ]{α}
(65)
Teniendo en cuenta la ecuación (60), la ecuación (65) quedaría como:
{ε} = [H ][C ] {u} = [B]{u}
−1
(66)
expresión ésta en la que la matriz [B ] es:
[B] = [H ][C ]
−1
⎡b1
1 ⎢
0
=
2a ⎢
⎢⎣c1
0
c1
b1
b2
0
c2
0
c2
b2
b3
0
c3
0⎤
c3 ⎥
⎥
b3 ⎥⎦
(67)
Por tanto, los términos de la matriz [B ] sólo dependen de las coordenadas de los nudos
del elemento.
Las tensiones en el interior del elemento pueden escribirse como:
⎡
νE
E
⎢
2
1− ν2
⎧σ x ⎫ ⎢ 1 − ν
E
⎪ ⎪ ⎢
⎨σ y ⎬ =
1− ν2
⎪τ ⎪ ⎢
⎩ xy ⎭ ⎢
⎢ Simétrica
⎣
⎤
⎥
⎥ ⎧⎪ ε x ⎫⎪
0 ⎥⎨ ε y ⎬
⎥⎪ ⎪
E ⎥ ⎩γ xy ⎭
2(1 + ν )⎥⎦
0
si el elemento trabaja en tensión plana y:
(68a)
⎡
E (1 − ν )
⎢
⎧σ x ⎫ ⎢ (1 + ν ) ⋅ (1 − 2ν )
⎪ ⎪ ⎢
⎨σ y ⎬ =
⎪τ ⎪ ⎢
⎩ xy ⎭ ⎢
⎢ Simétrica
⎣
νE
(1 + ν ) ⋅ (1 − 2ν )
E (1 − ν )
(1 + ν ) ⋅ (1 − 2ν )
⎤
⎥
⎥⎧ ε x ⎫
⎪ ⎪
0 ⎥⎨ ε y ⎬
⎥⎪ ⎪
E ⎥ ⎩γ xy ⎭
⎥
2(1 + ν )⎦
0
(68b)
si lo hiciera en deformación plana.
En todo caso, llamando (considerando que el elemento trabaja en tensión plana):
⎧σ x ⎫
{σ} = ⎪⎨σ y ⎪⎬
⎪τ ⎪
⎩ xy ⎭
⎡
νE
E
⎢ 1− ν2
1− ν2
⎢
E
[D] = ⎢
1− ν2
⎢
⎢
⎢ Simétrica
⎣
⎤
⎥
⎥
0 ⎥
⎥
E ⎥
2(1 + ν )⎥⎦
0
⎧εx ⎫
{ε} = ⎪⎨ ε y ⎪⎬
⎪γ ⎪
⎩ xy ⎭
(69)
la ecuación (68a) queda, en forma más compacta, como:
{σ} = [D]{ε}
(70)
Teniendo en cuenta la ecuación (66), la ecuación (70) puede escribirse como:
{σ} = [D][B]{u}
(71)
En esta última ecuación, es conveniente emplear la siguiente nomenclatura y tener en
cuenta las consideraciones que se hacen:
{σ} se denomina vector tensión en el elemento,
{u}se denomina vector desplazamientos nodales,
[D] es una matriz que depende de las propiedades elásticas del material y de si trabaja
en condiciones de tensión o deformación planas, y, finalmente,
[B]
es una matriz cuyos elementos dependen de las coordenadas cartesianas de los
nudos del elemento.
Veamos, ahora, cómo podemos obtener lo que pretendíamos en un principio: la matriz
de rigidez del elemento.
Para ello, vamos a suponer que, sobre los nudos del elemento actúan las fuerzas
( ( F1 ) x , ( F1 ) y , ( F2 ) x , etc. ) que aparecen en la Figura 11. Estas fuerzas serían las que,
realmente, actúan en los nudos del elemento. Supongamos que, a los nudos del
elemento de la Figura 11, les damos unos desplazamientos virtuales (desplazamientos
físicamente posibles y compatibles con las ligaduras pero que no, necesariamente,
coinciden con los reales que van a experimentar los nudos) tales como los representados
en la Figura 12 (para diferenciar estos desplazamientos virtuales de los reales hemos
escrito los primeros con un superíndice δ).
( u3δ )y
( u3δ )x
3
y
( u2δ )y
( u1δ)y
( u2δ )x
2
1
( u1δ )x
x
FIGURA 12
{ }, será:
El vector desplazamientos nodales virtual, u
δ
⎧(u1δ )x ⎫
⎪ δ ⎪
⎪(u1 )y ⎪
⎪⎪(u 2δ )x ⎪⎪
δ
{u } = ⎨(u δ ) ⎬
⎪ 2 y⎪
⎪(u3δ )x ⎪
⎪ δ ⎪
⎪⎩(u3 )y ⎪⎭
(72)
Aplicando el Principio de los Trabajos Virtuales, podemos establecer que, para unos
{ }, el trabajo realizado por las
desplazamientos virtuales de los nudos del elemento, u
δ
fuerzas reales que actúan en los nudos del elemento, {F } , debe ser igual al trabajo
realizado por las tensiones internas {σ} reales que actúan dentro del elemento teniendo
{ } que aparecería en el interior del
en cuenta el campo de deformaciones virtuales ε
elemento.
δ
Es decir, si:
{F } {u } = Trabajo de las
δ
T
fuerzas nodales
(73)
podemos escribir entonces que:
{F } {u } = ∫ {σ} {ε } d Vol
δ
T
δ
T
(74)
Volumen
donde:
{ε } = [B]{u }
δ
δ
(75)
representa el campo de deformaciones (virtuales) inducido por los desplazamientos,
{ }, el vector {σ} representa el vector tensión real que se produce
también virtuales, u
δ
en el elemento como consecuencia de las fuerzas {F } (ver Ecuación (71)).
Por tanto:
{F } {u } =
T
δ
(
)
δ
δ
∫ {u} [B ] [D ] ⋅ ([B ]{u }) d Vol = ∫ {u} [B ] [D ] [B ]{u } d Vol
T
T
T
Volumen
T
T
T
Volumen
…….. (76)
Esta última ecuación debe cumplirse para cualquier conjunto de desplazamientos
virtuales que se impongan sobre el elemento, por lo que se tendrá que verificar que:
{F }
T
T
T
T
= {u} ⎛⎜ ∫ [B ] [D ] [B ] d Vol ⎞⎟
⎝ Volumen
⎠
(77)
Trasponiendo la ecuación (77) llegamos a que:
{F } = ⎛⎜
T
⎞
∫ [B ] [D ][B ] d Vol ⎟ {u}
⎝ Volumen
⎠
Como, en este caso, los elementos de las matrices
(78)
[B]
y [D ] son constantes, la
Ecuación (78) puede escribirse como:
{F } = ([B] [D][B]Volumen){u}
T
(79)
donde el “Volumen” se refiere al volumen del elemento, y, por tanto, la matriz de
[ ]
[K ] = [B] [D][B]Volumen
rigidez, K e , buscada es:
e
T
Teniendo en cuenta las expresiones de las matrices
(80)
[B]
y
[D]
dadas por las
[ ],
expresiones (67) y (68), respectivamente, la matriz de rigidez del elemento, K
resulta ser:
e
⎡k11
⎢
⎢
⎢
[K e ] = e ⎢
4a ⎢
⎢
⎢
⎣
k12
k13
k14
k15
k 22
k 23
k 24
k 25
k 33
k 34
k 35
k 44
k 45
sim .
k 55
k16 ⎤
k 26 ⎥⎥
k 36 ⎥
⎥
k 46 ⎥
k 56 ⎥
⎥
k 66 ⎦
donde:
k11 = d11b12 + d 33 c12
k 22 = d 22 c12 + d 33b12
k 33 = d11b22 + d 33 c22
k 44 = d 22 c22 + d 33b22
k 55 = d11b32 + d 33 c32
k 66 = d 22 c32 + d 33b32
k12 = (d12 + d 33 )b1c1
k13 = d11b1b2 + d 33 c1c2
k14 = d12 b1c2 + d 33 c1b2
k15 = d11b1b3 + d 33 c1c3
k16 = d12 b1c3 + d 33 c1b3
k 23 = d12 b2 c1 + d 33b1c2
k 24 = d 22 c1c2 + d 33b1b2
k 25 = d12 b3 c1 + d 33b1c3
k 26 = d 22 c1c3 + d 33b1b3
k 34 = (d12 + d 33 )b2 c2
k 35 = d11b2 b3 + d 33 c1c3
k 36 = d12 b2 c3 + d 33b3 c2
k 45 = d 21b3 c2 + d 33b2 c3
k 46 = d 22 c2 c3 + d 33b3b2
k 56 = (d 21 + d 33 )b3 c3
siendo a =
1
(a1 + a2 + a3 ) y e el espesor del elemento.
2
(81)
Veamos, ahora, cómo analizar un problema concreto de Elasticidad utilizando los
conocimientos que hemos alcanzado. Supongamos el problema, en tensión plana, de la
Figura 13:
y
P
x
FIGURA 13
que corresponde a una placa rectangular, de la que supondremos conocidas todas sus
dimensiones y las propiedades elásticas del material que la forma, que se encuentra
sometida a la acción de la carga P y simplemente apoyada en dos de sus esquinas.
Lo primero que haríamos es modelizar el sólido en base a elementos finitos triangulares
(que son los que hemos estudiado), numerando los nudos y los elementos. La malla de
elementos finitos resultante podría ser (Figura 14):
y
P
3
1
5
1
3
2
2
4
x
FIGURA 14
La malla que hemos realizado (hemos numerado, consecutivamente, sus nudos y
elementos, comenzando ambos desde el 1) es muy simple y, desde luego, podríamos
haber realizado otra malla con muchos más nudos y elementos. Pero para lo que ahora
nos interesa (clarificar la metodología del análisis por elementos finitos) nos es
suficiente.
Lógicamente, hemos situado un nudo (en concreto el nudo 3) en el punto de aplicación
de la carga exterior y otros dos nudos (el 2 y 5) en puntos dónde van a aparecer las
fuerzas de reacción, así como los nudos 1 y 4 en las esquinas libres de la placa.
Nuestra malla de elementos finitos consta, pues, de 5 nudos y 3 elementos triangulares.
Por tanto, el elemento 1 queda definido por los nudos 1, 2 y 3; el elemento 2, por los
nudos 2, 4 y 3 (recuérdese que hay que nombrar los nudos de los elementos siguiendo
un sentido antihorario en el recorrido de los mismos); y el elemento 3, por los nudos 3,
4 y 5.
Convendría hacer una precisión de importancia a la hora de definir los elementos. Si
nosotros definimos, por ejemplo, el elemento 2 dando la secuencia de sus nudos de la
forma 2, 4 y 3, implícitamente estamos dando al nudo 2 (global) el tratamiento del nudo
1 (local) de la Figura 11 y, por tanto, al nudo 4 de la malla global el tratamiento del
nudo 2 de dicha figura y, finalmente, al nudo 3 el tratamiento del nudo 3 de la Figura
11. Si, por ejemplo, hubiésemos definido este elemento de la forma, 4,3,2 (lo cual sería
perfectamente posible y que sigue manteniendo el criterio de numeración de los nudos
en sentido antihorario), al analizar el elemento 2 (de cara a la obtención de la matriz de
rigidez) deberíamos considerar que el nudo 4 de la realidad corresponde al nudo 1
(local) de la Figura 11, y el 3 y 2 a los 2 y 3, respectivamente, de dicha figura.
El segundo paso consiste en calcular las matrices de rigidez de cada elemento, de
acuerdo a la expresión (63) y atendiendo a lo representado en la Figura 15 (en la que
puede observarse las fuerza que actúan sobre cada nudo de cada elemento y las fuerzas
que actúan sobre cada nudo en concreto considerando las exteriores y las que ejercerían
los elementos que confluyen en ese nudo).
(R5 )y
(F5’’’ )x
5
(R5)x
(R1 )y
(F1’ )y
(F3’’’ ) y
(F1’ )x 1
(R1 )x
(R3)x
3
(F3’’’ ) x
(F2’ ) x
(F2’ ) y
(F1’ )y
(F3’’ )x
5
3
3
(F1’ )x
(F5’’’ )y
(F3’’’ )y
(F3’’ )y
(F3’ )y
1
(F5’’’ )y
(R3 )y
(F3’’’ )x
(F3’ )x
(F5’’’ )x
3
(F3’’ )y
1
(F3’’ )x
3
2
(F2’ )y
(F4’’ )y
(F4’’ )x
2
4
(R4 )y
(R2 )y
(F4’’’ )x
(R2 )x
2
(F2’’ ) x
(F2’ ) x
(F4’’’ )y
2
(F2’’ )x
(F2’’ ) y
(F4’’’ )x
4
(F2’ )x
(F2’’ )y
(F4’’ )x
(F2’ ) y
4
(R4)x
’’’
(F4’’ )y (F4 )y
FIGURA 15
Así, por ejemplo, para el elemento 1, tendríamos:
[K ]
e elemento 1
⎡k 111
⎢
⎢
⎢
=⎢
⎢
⎢
⎢
⎣
k 112
k 1 22
k 113
k 1 23
k 1 33
sim .
donde ya hemos incluido el factor
k 114
k 1 24
k 134
k 115
k 1 25
k 135
k 1 44
k 1 45
k 155
k 116 ⎤
⎥
k 1 26 ⎥
k 136 ⎥
⎥
k 1 46 ⎥
k 156 ⎥
⎥
k 1 66 ⎦
(81)
e
en todos los elemento de la matriz de rigidez (el
4a 1
superíndice 1 se refiere, lógicamente, al elemento 1).
Si hubiéramos numerado los nudos de este elemento de la forma:1,2,3, podríamos
escribir:
{F } = [K ]
1
donde:
e elemento 1
{u }
1
(82)
⎧⎛ F ′ ⎞ ⎫
⎪ ⎜⎝ 1 ⎟⎠ x ⎪
⎪⎛ ′ ⎞ ⎪
⎪⎜ F1 ⎟ ⎪
⎪⎝ ⎠ y ⎪
⎪⎛⎜ F ′ ⎞⎟ ⎪
2
{F 1 } = ⎪⎨⎛⎝ ′ ⎞⎠ x ⎪⎬
⎪⎜ F2 ⎟ ⎪
⎪⎝ ⎠ y ⎪
⎪⎛⎜ F ′ ⎞⎟ ⎪
⎪⎝ 3 ⎠ x ⎪
⎪⎛ ′ ⎞ ⎪
⎪⎜ F3 ⎟ ⎪
⎩⎝ ⎠ y ⎭
y
De igual manera (y afectando del factor
⎧ (u1 )x ⎫
⎪(u ) ⎪
⎪ 1 y⎪
⎪(u ) ⎪
{u 1 } = ⎪⎨(u 2 )x ⎪⎬
⎪ 2 y⎪
⎪(u 3 )x ⎪
⎪
⎪
⎪⎩(u 3 ) y ⎪⎭
(83)
e
a los elementos de la matriz de rigidez)
4a 2
podríamos haber hecho el mismo tratamiento para el elemento 2 (supuesto que en éste
hemos numerado sus nudos como 2,4,3) que hicimos para el elemento 1. Así, habríamos
llegado a que:
{F } = [K ]
2
e elemento 2
{u }
2
(84)
donde:
⎧⎛ F ″ ⎞ ⎫
⎪⎜⎝ 2 ⎟⎠ x ⎪
⎪⎛ ″ ⎞ ⎪
⎪⎜ F2 ⎟ ⎪
⎠y ⎪
⎪⎝
⎪⎛⎜ F ″ ⎞⎟ ⎪
4
{F 2 } = ⎪⎨⎛⎝ ″ ⎞⎠ x ⎪⎬
⎪⎜ F4 ⎟ ⎪
⎠y ⎪
⎪⎝
⎪⎛⎜ F ″ ⎞⎟ ⎪
⎪⎝ 3 ⎠ x ⎪
⎪⎛ ″ ⎞ ⎪
⎪⎜ F3 ⎟ ⎪
⎠y ⎭
⎩⎝
y
⎧(u 2 )x ⎫
⎪(u ) ⎪
⎪ 2 y⎪
⎪(u ) ⎪
{u 2 } = ⎪⎨(u 4 )x ⎪⎬
⎪ 4 y⎪
⎪(u 3 )x ⎪
⎪
⎪
⎪⎩(u 3 ) y ⎪⎭
y, finalmente, para el elemento 3 (incluyendo el término
(85)
e
dentro de la matriz y
4a 3
numerados sus nudos como 3,4,5), obtendríamos:
{F } = [K ]
3
siendo:
e elemento 3
{u }
3
(86)
⎧(F3' ' ' )x ⎫
⎪( F ' ' ' ) ⎪
⎪ 3 y⎪
⎪( F ' ' ' ) ⎪
{F 3 } = ⎪⎨(F4' ' ' ) x ⎪⎬
⎪ 4 y⎪
⎪(F5' ' ' )x ⎪
⎪
⎪
⎪⎩(F5' ' ' ) y ⎪⎭
⎧(u 3 )x ⎫
⎪(u ) ⎪
⎪ 3 y⎪
⎪(u ) ⎪
{u 3 } = ⎪⎨(u 4 )x ⎪⎬
⎪ 4 y⎪
⎪(u 5 )x ⎪
⎪
⎪
⎪⎩(u 5 ) y ⎪⎭
y
(87)
El tercer paso, consistiría en ensamblar las matrices de rigidez de los elementos, de
forma similar a como hicimos para obtener la ecuación (10). Para ello, vamos a
considerar los vectores fuerzas y desplazamientos ordenados desde el nudo 1 hasta el 5.
Así, para el elemento 1, podemos escribir directamente:
(
(
(
(
(
(
⎧ F′
⎪ 1
⎪ F1′
⎪ ′
⎪ F2
⎪ ′
⎪ F2
⎪⎪ ′
⎨ F3
⎪ F3′
⎪
⎪0
⎪
⎪0
⎪0
⎪
⎪⎩0
) ⎫⎪ ⎡k
) ⎪⎪ ⎢⎢
) ⎪⎪ ⎢⎢
) ⎪ ⎢⎢
) ⎪⎪⎬ = ⎢
) ⎪⎪ ⎢⎢
1
11
x
y
1
k12
1
k13
1
k14
1
k15
1
k16
1
k 22
1
k 23
1
k 24
1
k 25
1
k 26
1
k 33
1
k 34
1
k 35
1
k 36
1
k 44
1
k 45
1
k 46
1
k 55
1
k 56
x
y
x
y
⎪
⎪
⎪
⎪
⎪
⎪⎭
⎢
⎢
⎢
⎢
⎢
⎣
1
k 66
Sim.
(u )
⎧
⎫
0 0 0 0⎤ ⎪ 1 x ⎪
⎥ (u )
0 0 0 0⎥ ⎪ 1 y ⎪
0 0 0 0⎥ ⎪(u 2 ) x ⎪
⎪
⎥⎪
0 0 0 0⎥ ⎪(u 2 ) y ⎪
⎪(u 3 ) x ⎪⎪
0 0 0 0⎥⎥ ⎪
⎨
⎬
0 0 0 0⎥ ⎪(u 3 ) y ⎪
⎥
⎪
0 0 0 0 ⎥ ⎪0
⎪
⎪
0 0 0 ⎥ ⎪0
⎪
⎥
0 0 ⎥ ⎪0
⎪
⎪
⎪
⎥
0 ⎦ ⎪0
⎪
⎩
(88)
⎭
Para el elemento 2:
Para este elemento, al reordenar el vector de fuerzas (o el de desplazamientos) en la
secuencia 2,3,4, tendríamos que permutar las filas y columnas 2 y 4, por las 5 y 6),
resultando:
⎧0
⎪0
⎪
⎪F ″
⎪ 2
⎪ F2 ″
⎪
⎪⎪ F3 ″
⎨ ″
⎪ F3
⎪ ″
⎪ F4
⎪F ″
⎪ 4
⎪0
⎪
⎪⎩0
(
(
(
(
(
(
⎫
0
0
⎪ ⎡0
⎪ ⎢
0
0
⎪ ⎢
2
x⎪ ⎢
k11
⎢
⎪
y
⎪ ⎢
⎪ ⎢
x⎪
⎬=⎢
y⎪ ⎢
⎪ ⎢ Sim.
x⎪ ⎢
⎪ ⎢
y⎪ ⎢
⎪ ⎢
⎪ ⎢⎣
⎪⎭
)
)
)
)
)
)
0
0
2
k12
2
k 22
0
0
2
k13
2
k 23
0
0
2
k14
2
k 24
0
0
2
k15
2
k 25
0
0
2
k16
2
k 26
0
0
0
0
2
k 55
2
k 56
2
k 66
2
k 53
2
k 63
2
k 33
2
k 54
2
k 64
2
k 34
2
k 44
0
0
0
0
0
0⎤
0⎥⎥
0⎥
⎥
0⎥
0⎥
⎥
0⎥
0⎥
⎥
0⎥
⎥
0⎥
0⎥⎦
⎧0
⎫
⎪0
⎪
⎪
⎪
⎪(u 2 )x ⎪
⎪(u ) ⎪
⎪ 2 y⎪
⎪(u 3 ) x ⎪
⎨( ) ⎬
⎪ u3 y ⎪
⎪(u 4 )x ⎪
⎪(u ) ⎪
⎪ 4 y⎪
⎪0
⎪
⎪
⎪
⎩0
⎭
(89)
Para el elemento 3:
0
0 0 0
⎧0
⎫ ⎡0
⎪0
⎪ ⎢
0
0 0 0
⎪
⎪ ⎢
⎪0
⎪ ⎢
0 0 0
⎪
⎪ ⎢
0 0
⎪0
⎪ ⎢
3
⎪⎪ (F3 ' ' ') ⎪⎪ ⎢
k11
x
⎨ ( F ' ' ') ⎬ = ⎢
⎪ 3 y⎪ ⎢
⎪(F4 ' ' ') x ⎪ ⎢ Sim.
⎪(F ' ' ') ⎪ ⎢
⎪ 4 y⎪ ⎢
⎪(F5 ' ' ') x ⎪ ⎢
⎪
⎪ ⎢
⎪⎩(F5 ' ' ') y ⎪⎭ ⎢⎣
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
3
k12
3
k 22
3
k13
3
k 23
3
k 33
3
k14
3
k 24
3
k 34
3
k 44
3
k15
3
k 25
3
k 35
3
k 45
3
k 55
⎫
0 ⎤⎧
⎪
⎪
0 ⎥⎥ ⎪0
⎪
⎪
⎪
0
⎥
0
⎪
⎥ ⎪0
0 ⎥⎪
⎪
3 ⎥ ⎪
k16 ⎪(u 3 ) x ⎪
⎪
3 ⎥ ⎨(u ) ⎬
k 26 ⎥ ⎪ 3 y ⎪
3 ⎥
k 36
⎪(u ) ⎪
⎥ ⎪ 4 x⎪
3
k 46 ⎥ (u 4 ) y
⎪
⎪
3 ⎥
k 56
⎥ ⎪(u 5 ) x ⎪
3 ⎥ ⎪
⎪
k 66
⎦ (u )
0
⎪⎩
5 y
(90)
⎪⎭
Por tanto, la matriz de rigidez global de la estructura [K ] sería (sumando las ecuaciones
(88), (89) y (90)):
1
1
1
1
1
1
⎡k11
k12
k13
k14
k15
k16
0
⎢
1
1
1
1
1
k22
k23
k24
k25
k26
0
⎢
1
2
1
2
1
2
1
2
2
⎢
k33 + k11 k34 + k12
k35 + k15
k36 + k16
k13
⎢
1
2
1
2
1
2
2
k44
k45
k46
k23
+ k22
+ k25
+ k26
⎢
⎢
1
2
3
1
2
3
2
3
k55
k56
k53
+ k55
+ k11
+ k56
+ k12
+ k13
⎢
1
2
3
2
3
⎢
k66
k63
+ k66
+ k22
+ k23
⎢
2
3
Sim.
k33
+ k33
⎢
⎢
⎢
⎢
⎢
⎣
0
0
0
0
2
k14
0
2
k24
0
3
k15
2
3
k54
+ k14
2
3
k64
+ k24
2
3
k34
+ k34
2
3
k44
+ k44
3
k25
3
k35
3
k45
3
k55
0⎤
⎥
0⎥
0⎥
⎥
0⎥
3 ⎥
k16
⎥
3
⎥
k26
3 ⎥
k36⎥
3 ⎥
k46
3 ⎥
k56
⎥
3 ⎥
k66⎦
(91)
y se cumpliría que:
{R} = [K ]{u}
(92)
donde:
(F1 ')x
⎫
⎧ (R1 ) x ⎫⎧
⎪
⎪
⎪ (R ) ⎪
(
F1 ') y
⎪
⎪
1
y
⎪
⎪
⎪
⎪ ( R 2 ) x ⎪⎪
(F2 ')x + (F2 ' ')x
⎪
⎪
⎪
⎪
⎪
(F2 ') y + (F2 ' ') y
⎪(R2 ) y ⎪⎪
⎪
⎪ (R3 ) ⎪⎪
⎪
x ⎪ ⎪ ( F ') + ( F ' ') + ( F ' ' ') ⎪
3 x
3
x⎬
{R} = ⎨(R ) ⎬⎨ 3 x
⎪ 3 y ⎪⎪(F3 ') y + (F3 ' ') y + (F3 ' ' ') y ⎪
⎪ ( R 4 ) x ⎪⎪
(F4 ' ') x + (F4 ' ' ') x ⎪⎪
⎪⎪
⎪
(F4 ' ') y + (F4 ' ' ') y ⎪
⎪(R4 ) y ⎪⎪
⎪
⎪(R5 ) ⎪⎪
(F5 ' ' ')x
x
⎪
⎪⎪
⎪
⎪
⎪⎩(R5 ) y ⎪⎭⎪
(
F5 ' ' ') y
⎭
⎩
⎧(u1 ) x ⎫
⎪
⎪
⎪(u1 ) y ⎪
⎪(u ) ⎪
⎪ 2 x⎪
⎪(u 2 ) y ⎪
⎪
⎪
⎪(u 3 ) ⎪
x⎬
y {u} = ⎨
⎪(u 3 ) y ⎪
⎪(u ) ⎪
⎪ 4 x⎪
⎪(u 4 ) y ⎪
⎪(u ) ⎪
⎪ 5 x⎪
⎪(u 5 ) y ⎪
⎭
⎩
(93)
Por tanto, hemos llegado a un sistema de 10 ecuaciones. Veamos cuántas incógnitas
tenemos en nuestro problema de la Figura 14. Por una parte, en lo relativo a fuerzas
directamente aplicadas y reacciones, sabemos que:
(R )
1 x
= (R1 ) y = (R3 )x = (R4 )x = (R4 ) y = 0
y
(R )
3
y
= −P
ya que los nudos 1 y 4 se encuentran libres de cargas exteriores y, en el nudo 3 existe
una carga aplicada vertical (negativa porque su sentido es el contrario al del eje y) y
que, por tanto, no tiene componente horizontal.
El vector de fuerzas que resulta será:
⎧ 0 ⎫
⎪ 0 ⎪
⎪
⎪
⎪(R2 )x ⎪
⎪
⎪
⎪(R2 ) y ⎪
⎪
⎪
{F } = ⎪⎨ − 0P ⎪⎬
⎪
⎪
⎪ 0 ⎪
⎪
⎪
0
⎪
⎪
⎪ ( R5 ) x ⎪
⎪
⎪
⎪⎩(R5 ) y ⎪⎭
(94)
que proporciona cuatro incógnitas ( (R2 ) x , (R2 ) y , (R5 ) x , (R5 ) y ) que representan las
reacciones existentes en los nudos 2 y 5 de nuestra malla.
Por otra parte, también sabemos que los nudos 2 y 5 no sufrirán desplazamientos (los
apoyos existentes lo impiden), por lo que:
(u )
2
x
= (u 2 ) y = (u 5 )x = (u 5 ) y = 0
y el vector desplazamientos será:
⎧(u1 )x ⎫
⎪
⎪
⎪(u1 ) y ⎪
⎪ 0 ⎪
⎪
⎪
⎪ 0 ⎪
⎪
⎪
{u} = ⎪⎨(u 3 )x ⎪⎬
⎪(u 3 ) y ⎪
⎪(u 4 )x ⎪
⎪
⎪
⎪(u 4 ) y ⎪
⎪ 0 ⎪
⎪
⎪
⎪⎩ 0 ⎪⎭
(95)
que proporciona 6 incógnitas: (u1 ) x , (u1 ) y , (u 3 ) x , (u 3 ) y , (u 4 ) x , (u 4 ) y adicionales a las 4
provenientes del vector de fuerzas.
Como el sistema
{R} = [K ]{u}
(96)
proporciona 10 ecuaciones y tenemos 10 incógnitas, la resolución del sistema de
ecuaciones proporcionará las 10 incógnitas de nuestro problema.
Planteamiento y formulación genéricos del Método de los elementos finitos
Aunque las ecuaciones que vamos a deducir son totalmente genéricas para cualquier
tipo de elemento, y con objeto de facilitar la comprensión de las mismas, plantearemos
las ecuaciones del Método de los Elemento Finitos de una forma general,
particularizando para el elemento triangular que hemos estudiado en el apartado
anterior. Así, consideremos el elemento triangular de la Figura 16, en el que sus nudos
vienen definidos por los números i,j,k.
vi
ui
i
y
vm
vj
um
m
j
uj
x
FIGURA 16
Ahora hemos representado los desplazamientos en los nudos por la letra “u”, cuando se
refieren a desplazamientos según el eje x, y por “v” cuando corresponden según el eje y.
El vector que agrupa los desplazamientos nodales lo vamos a representar por {a} ,
e
donde el superíndice “e” se refiere al elemento en cuestión que consideremos. En el
caso del elemento triangular, tendríamos:
⎧ ui ⎫
⎪v ⎪
⎪ i⎪
⎪u ⎪
{a}e = ⎨ j ⎬
⎪v j ⎪
⎪u m ⎪
⎪ ⎪
⎩vm ⎭
(97)
Nótese que, este vector lo podríamos haber obtenido poniendo consecutivamente, en
forma de vector columna, los vectores:
{a}
k
⎧u ⎫
=⎨ k⎬
⎩vk ⎭
(98)
suponiendo que el subíndice “k” toma los valores “i,j,m”.
El vector {u}que proporciona el campo de desplazamientos en el interior del elemento
es:
u (x , y ) ⎫
⎬
⎩v( x , y )⎭
{u} = ⎧⎨
(99)
La idea clave del Método, consiste en suponer que el vector {u} puede escribirse a
partir del vector {a} ; es decir, que los desplazamientos de cualquier punto del interior
e
del elemento dependen, sólo y exclusivamente, de los desplazamientos de los nudos de
dicho elemento.
Por tanto, podremos escribir:
{u} = [[N (x , y )] , [N (x , y )] , [N (x , y )]] {a}
e
i
j
(100)
m
[
][
][
]
Este conjunto de matrices ( N i ( x , y ) , N j ( x , y ) , N m (x , y ) ), que deben, para el
caso del elemento triangular, cuadradas de orden 2, son las funciones de interpolación
para determinar el campo de desplazamientos en el interior del elemento, y se conocen
como funciones de forma del elemento, y deben cumplir lo siguiente:
[N (x
[N (x
k
k
donde
k
, y k )] = [I ]
para k = i , j , m
)] = [0] si n ≠ k
n , yn
[I ]
(101)
es la matriz unidad. Aunque puede parecer complicado estos nuevos
desarrollos respecto de lo que hicimos con anterioridad, vamos a ver que el proceso es
bastante más sencillo de lo que parece y, para ello, vamos a analizar un ejemplo.
Para el caso del elemento triangular, vimos que, el campo de desplazamientos en el
interior del elemento lo aproximábamos de la siguiente manera:
u (x , y ) = α 1 + α 2 x + α 3 y
v (x , y ) = α 4 + α 5 x + α 6 y
(102)
Nótese que, en la ecuación anterior, tenemos seis coeficientes por determinar
( α 1 , α 2 ,......, α 6 ) y que disponemos de seis ecuaciones, las cuales se plantearán
igualando, para las coordenadas x e y de cada nudo, los desplazamientos deducidos de la
Ecuación (102) a los desplazamientos en los nudos correspondientes.
Particularizando la ecuación (102) para los tres nudos del elemento, podríamos escribir
que:
u i = α 1 + α 2 xi + α 3 y i
u j = α1 + α 2 x j + α 3 y j
u m = α1 + α 2 xm + α 3 y m
vi = α 4 + α 5 xi + α 6 y i
(103)
v j = α4 + α5 x j + α6 y j
vm = α 4 + α 5 xm + α 6 y m
Partiendo de las tres primeras ecuaciones, podríamos obtener los parámetros
α 1 , α 2 , α 3 en función de u i ,u j ,u m , y los parámetros α 4 , α 5 , α 6 en función de
vi , v j , vm , resultando que la ecuación (99) quedaría de la forma:
1
((ai + bi x + ci y )ui + (a j + b j x + c j y )u j + (am + bm x + cm y )u m )
2∆
1
((ai + bi x + ci y )vi + (a j + b j x + c j y )v j + (am + bm x + cm y )vm )
v (x , y ) =
2∆
u (x , y ) =
……...(104)
donde:
1 xi
2∆ = 1 x j
1 xm
yi
y j = 2 × Area del triángulo ( i , j , m )
ym
(105)
y
ai = x j y m − x m y j
bi = y j − y m
(106)
ci = x m − x j
y, por permutación cíclica, podrían obtenerse el resto de coeficientes.
Por tanto, las expresiones de las funciones de forma, serían:
N i (x , y ) =
1
(ai + bi x + ci y )
2∆
1
(a j + b j x + c j y )
N j (x , y ) =
2∆
1
(am + bm x + cm y )
N m (x , y ) =
2∆
(107)
con los coeficientes ai , bi , ci , a j , b j , c j , a m , bm , c m obtenidos de la ecuación (106).
Volviendo a la ecuación (100), ésta quedaría como:
{u} = [[N (x , y )] , [N (x , y )] , [N (x , y )]] {a} =
0
N (x , y )
0
N (x , y )
⎡ N (x , y )
=⎢
N (x , y )
0
N (x , y )
0
⎣ 0
= [N (x , y )[I ], N (x , y )[I ] , N (x , y )[I ]]{a} = [N ]{a}
e
i
j
m
i
j
m
i
j
e
i
j
⎤ e
{a} =
N m (x , y )⎥⎦
0
e
m
..... (108)
[ ]
La matriz N , de orden 2x6 para un elemento triangular, recibe el nombre de matriz
de forma del elemento.
Las deformaciones inducidas en el interior del elemento pueden expresarse, de una
manera más general, como:
⎡∂
⎢
⎧ ε x ⎫ ⎢ ∂x
{ε} = ⎪⎨ ε y ⎪⎬ = ⎢⎢ 0
⎪γ ⎪ ⎢
⎩ xy ⎭
∂
⎢
⎢⎣ ∂y
⎤
0⎥
⎥
∂ ⎥ ⎧u (x , y )⎫
⎬ = [L ]{u}
⎨
∂y ⎥ ⎩v(x , y )⎭
∂⎥
⎥
∂x ⎥⎦
(109)
[ ]
donde la matriz L es, en realidad, una matriz operador. Utilizando la ecuación (91), la
ecuación (100) puede escribirse como:
{ε} = [L]{u} = [L][N ]{a} = [B]{a}
(110)
donde la matriz [B ] es de 3x6, y puede expresarse, en forma de submatrices, como
e
e
sigue:
[B]= [[B ], [B ],[B ]]
i
j
(111)
m
siendo:
⎤
⎡ ∂N k (x , y )
0
⎥
⎢
x
∂
⎡bk
⎥
⎢
(
)
,
N
x
y
∂
1
⎢0
k
⎥=
[Bk ]= ⎢⎢ 0
⎥ 2∆ ⎢
∂y
⎢⎣c k
⎢ ∂N (x , y ) ∂N (x , y )⎥
k
⎥
⎢ k
∂x
⎥⎦
⎢⎣ ∂y
0⎤
c k ⎥⎥
bk ⎥⎦
(112)
[ ]
tomando el subíndice “k” los valores “i,j,m”. Por tanto, la matriz B , para el elemento
triangular que estamos considerando, sería:
⎡bi
[B]= ⎢⎢ 0
⎢⎣ci
0
ci
bi
bj
0
cj
0
cj
bj
bm
0
cm
0⎤
⎥
cm ⎥
bm ⎥⎦
(113)
Las tensiones en el interior del elemento se podrían obtener a partir de las
deformaciones utilizando las ecuaciones constitutivas (68a ó 68b), según se trate de un
problema en tensión o deformación planas, resultando:
{σ} = [D]{ε} = [D][B]{a}
e
(114)
La aplicación del Principio de los Trabajos Virtuales nos llevaría a que la matriz de
rigidez del elemento, [K ]e , puede expresarse como:
[K ] =
e
∫ [B ] [D ][B ] d Vol
T
(115)
Volumen
que, en el caso del elemento triangular en tensión plana que estamos considerando,
conduce a que:
[K ] = [B] [D][B] e ⋅ Area
T
e
(116)
Por tanto, si el vector {F }e representa las fuerzas nodales que actúan sobre el elemento,
se tendría que:
{F } = [K ]{a}
e
e
e
(117)