Máquinas rotativas de CA
Anuncio

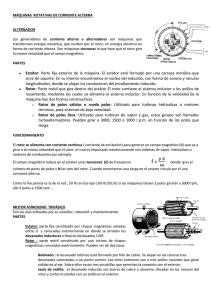
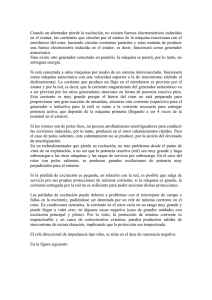
Dpto de Tecnoloxía Máquinas rotativas de CA MÁQUINAS ROTATIVAS DE CORRIENTE ALTERNA ALTERNADOR Los generadores de corriente alterna o alternadores son máquinas que transforman energía mecánica, que reciben por el rotor, en energía eléctrica en forma de corriente alterna. Son máquinas síncronas lo que hace que el rotor gire la misma velocidad que el campo magnético. PARTES Estátor: Parte fija exterior de la máquina. El estátor está formado por una carcasa metálica que sirve de soporte. En su interior encontramos el núcleo del inducido, con forma de corona y ranuras longitudinales, donde se alojan los conductores del enrollamiento inducido. Rotor: Parte móvil que gira dentro del estátor El rotor contiene el sistema inductor y los anillos de rozamiento, mediante los cuales se alimenta el sistema inductor. En función de la velocidad de la máquina hay dos formas constructivas. o Rotor de polos salidos o rueda polar: Utilizado para turbinas hidráulicas o motores térmicos, para sistemas de baja velocidad. o Rotor de polos lisos: Utilizado para turbinas de vapor y gas, estos grupos son llamados turboalternadores. Pueden girar a 3000, 1500 o 1000 r.p.m. en función de los polos que tenga. FUNCIONAMIENTO El rotor se alimenta con corriente continua ( corriente de excitación) para generar un campo magnético (B) que va a girar a la misma velocidad que el rotor, el cual es impulsado mecánicamente con turbinas de vapor, hidráulicas o motores de combustión por ejemplo. El campo magnético induce en el estator unas tensiones (E) de frecuencia f= donde p es el número de pares de polos y N las rpm del rotor. Cuando conectamos una carga en el estator circula por él una corriente alterna. Como la frecuencia es la de la red , 50 Hz en Europa ( 60 Hz EEUU) si las máquinas tienen 2 polos girarán a 3000 rpm, c0n 4 polos a 1500 rpm … MOTOR ASÍNCRONO TRIFÁSICO Son los más utilizados por su sencillez, robusted y mantenimiento. PARTES Estator: parte fija constituida por chapas magnéticas aisladas entre si y ranuradas interiormente en donde se arrollan los devanados inductores trifásicos desfasados 120º. Rotor : parte móvil constituido por una corona de chapas magnéticas ranuradas exteriormente. Pueden ser de dos tipos. Bobinado : el devanado rotórico está formado por hilo de cobre. Se alojan en las ranuras tres devanados conectados a un punto común. Los otros extremos van a tres anillos rozantes que giran solidarios al eje. Sobre ellos rozan tres escobillas que permiten la conexión con el exterior. Jaula de ardilla: el devanado inducido son barras de cobre o aluminio situadas en las ranuras del rotor y cortocircuitadas con un anillo en el exterior. 1 Dpto de Tecnoloxía Máquinas rotativas de CA FUNCIONAMIENTO Al aplicar corriente alterna trifásica a las bobinas inductoras ( devanado estatórico) , se produce un campo magnético giratorio ( teorema de Ferraris) cuya frecuencia( f) será igual a la de la corriente alterna con la que se alimenta al motor. La velocidad del campo giratorio en r.p.m. será pares de polos. n1 = 60 f / p donde p es el número de Este campo giratorio inducirá ( estátor y rotor no están conectados eléctricamente)una fem en cada una de las fases del rotor y este al estar cortocircuitado, originará corrientes en el mismo, que producirán a su vez un campo magnético que seguirá el movimiento del campo estatórico, produciendo un par motor que hace que el rotor gire . La inducción en el rotor sólo se produce si hay una diferencia en las velocidades relativas del campo estatórico y el rotórico, la velocidad del rotor nunca alcanza a la del campo rotante. Si ambas velocidades fuesen iguales, no habría inducción y el rotor no produciría el par. A esta diferencia de velocidad se la denomina "deslizamiento. Deslizamiento Frecuencias por el rotor : s= fr = s fred MOTOR ASÍNCRONO MONOFÁSICO Es similar al trifásico , con estator y rotor jaula de ardilla. Tiene dos devanados, uno principal que ocupa 2/3 y otro auxiliar que se utiliza en el arranque. Al estar alimentado por una única tensión no puede crear un campo magnético giratorio, para lograrlo se coloca el devanado auxiliar desfasado 90º eléctricos respecto al principal o colocando una impedancia en serie con el devanado principal para producir el desfase. Una vez que alcanza el 75% de la velocidad síncrona se desconecta el denvanado auxiliar. Motores Universales El motor universal, es un motor capaz de trabajar tanto en corriente continua como alterna , su aplicación principal es para herramientas portátiles ( taladros, batidoras, aspiradoras…)debido a su bajo coste, su reducido tamaño, su poco peso y que pueden trabajar en corriente alternA. Las ventajas de este motor son grandes pares de arranque y elevadas velocidades de rotación cuando se alimentan con excitación en serie (características semejantes al motor de continua con excitación en serie). 2 Dpto de Tecnoloxía Máquinas rotativas de CA MOTOR SÍNCRONO Pueden funcionar como alternador y trabajan a velocidad constante ( velocidad de sincronismo) dependiendo de la frecuencia de la corriente alterna que lo alimenta y del número de pares de polos del motor. Necesita un motor auxiliar en el arranque para que puedan acoplarse los campos magnéticos del estator, creado por una corriente alterna trifásica y el del rotor creado por una corriente continua. La ventaja de estos motores es que mantienen la velocidad constante y corrigen el factor de potencia de la red. Se utilizan en diferentes industrias en molinos, laminadoras, cintas transportadoras, bombas, compresores… BALANCE DE POTENCIAS MOTORES CA ASÍNCRONOS Pabs= m V I cos Φ m = nº de fases PCu1= m RI2 PFe PCu2= m RI2 Pútil= Pabs –PCu1- PFe- PCu2-Pmec Pcampo=Pabs –PCu1 Pm.rotor= Pabs –PCu1- PFe- PCu2 ARRANQUE DE MOTORES ASÍNCRONOS En el arranque requieren una elevada tensión (que puede provocar caídas de tensión en la red) y un mayor par que en el funcionamiento nominal. Para evitar este aumento de intensidad y par se utilizan diferentes métodos para controlar la tensión y la intensidad en el arranque ( actualmente se controlan con dispositivos electrónicos) como colocar impedancias en el estator para disminuir la tensión y a medida que arranca se van desconectando, colocar un autotransformador ( para grandes potencias) entre el motor y la red para disminuir la tensión, y arranque estrella-triángulo, en el arranque se conecta en estrella para que en los devanados caiga la tensión de fase ( menor que la de línea) y cuando alcance su velocidad nominal pasamos a triángulo y la tensión aplicada será la de línea. CONTROL DE LA VELOCIDAD Podemos controlar la velocidad (actualmente se controlan con dispositivos electrónicos ) variando la frecuencia , el número de pares de polos ( conexión Dahlander) o la tensión aplicada ( pequeñas potencias) 3 Dpto de Tecnoloxía Máquinas rotativas de CA CURVAS CARACTERÍSTICAS DEL MOTOR ASÍNCRONO DE CA ( www.maixmail.com) - Arranque En el momento del arranque la velocidad es cero (n=0). El valor Mra es el par resistente de arranque y corresponde al valor mínimo que debe aplicarse a la carga para ponerla en movimiento, análogamente, Mia es el par interno de arranque del motor, es evidente que para que el sistema se ponga en movimiento debe ser Mia > Mra. Se considera que el par de arranque debe ser entre 1,25 y 2,5 veces el valor del par nominal (Mn), en estas condiciones la corriente en el arranque Ia tomara un valor entre 5 y 8 veces la intensidad nominal In. -Funcionamiento en vacío Si el motor arranque en vacío el punto de funcionamiento es el P, en el que el par suministrado es nulo (en realidad debe vencerse un par propio relacionado con los roces internos y el momento de inercia del rotor) y la velocidad de vacío (n = n0) está cercana a la velocidad de sincronismo. -Funcionamiento estable con carga Cuando el motor funciona con carga, el punto de funcionamiento (Mn, nn) corresponde a aquel en el que se cortan las curvas características de la carga y del motor (Q), es decir, la velocidad en la que el par motor se iguala al par resistente. Si modificáramos la carga de manera que el par resistente cambiara (curva B) tendríamos un nuevo punto de funcionamiento estable (Q1) en el cual el motor debería disminuir la velocidad para suministrar un par mayor. 4