- Ninguna Categoria
desarrollo de un emulador de turbinas para el accionamiento
Anuncio
UNIVERSIDAD PONTIFICIA COMILLAS
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA (ICAI)
INGENIERÍA INDUSTRIAL
PROYECTO FIN DE CARRERA
DESARROLLO DE UN EMULADOR DE
TURBINAS PARA EL
ACCIONAMIENTO DE GENERADORES
ELÉCTRICOS
JAIME ARRIBAS BARBA
MADRID, junio de 2006
Autorizada la entrega del proyecto al alumno:
Jaime Arribas Barba
LOS DIRECTORES DEL PROYECTO
Juan Luis Zamora Macho
Fdo:
Fecha:
Fidel Fernández Bernal
Fdo:
Fecha:
Vº Bº del Coordinador de Proyectos
Tomás Gómez San Román
Fdo:
Fecha:
Resumen
iii
Resumen
Introducción
El presente proyecto nace con el objetivo de mejorar y simplificar los ensayos y
estudios en el funcionamiento y control de generadores de energía eléctrica, en
concreto, se ha trabajado en el modelo de un aerogenerador.
Para ello se pretende diseñar y probar un simulador que permita someter a uno
de estos generadores a cualquier situación de funcionamiento por medio de un control
vectorial que accione un motor asíncrono. Asimismo, se han realizado diferentes
ensayos en el laboratorio de máquinas eléctricas de ICAI con el objetivo de obtener
resultados importados de la realidad.
Solución planteada
Se ha desarrollado una solución que utiliza la plataforma Simulink del programa
Matlab como marco de trabajo. Se han diseñado distintos modelos tales como controles
PI y se han integrado en un esquema que utiliza modelos previamente desarrollados
como un control vectorial de modulación de ancho de pulso, un motor de inducción, una
máquina de continua y un aerogenerador.
El modelo del aerogenerador permite simular las condiciones externas reales
tales como la velocidad del viento y su ángulo de ataque a los álabes. Este modelo
proporciona una velocidad teórica de la turbina eólica que sirve de referencia para que
un control vectorial actúe adecuadamente sobre un motor de inducción.
El motor asíncrono está acoplado mecánicamente por medio de un eje a una máquina
de continua que realiza la función de generador. Por último, este generador descarga la
potencia sobre una resistencia de carga.
Esquemáticamente, la solución se muestra en la Figura 1:
Resumen
iv
Figura 1. Esquema simplificado la solución adoptada
Ensayos realizados
El presente proyecto continúa el PFC 2004/2005 de César Aguiar de título
“Emulador de Turbinas para Accionamiento de Generadores Eléctricos” en donde se
planteaba una solución en la que un motor asíncrono es controlado en tensiónfrecuencia V/F. En este proyecto se ha reproducido el experimento final del año anterior
utilizando el banco 4 del laboratorio de máquinas eléctricas. Durante el experimento se
han capturado las variables más interesantes por medio de la tarjeta de adquisición de
datos PCI 6024E y el sistema de tiempo real Real Time Windows Target de Matlab.
Igualmente, se ha realizado el acoplamiento de un encoder incremental al eje del
banco 4 del laboratorio de máquinas eléctricas, aunque finalmente no se ha utilizado.
Por último se ha implantado y validado un algoritmo para la estimación de la
velocidad de rotación de un motor de inducción. Utilizando los recursos anteriores de
adquisición de datos en tiempo real, se capturaron dos tensiones y dos corrientes
debidamente filtradas de un motor para conseguir unos resultados fiables.
Resultados
En este proyecto se han obtenido resultados interesante al realizar las
simulaciones en que se recrea un escenario real donde trabaja un aerogenerador. En
ellas se partió de unas condiciones de viento determinadas y se observó el
comportamiento que de los diferentes modelos desarrollados.
Resumen
v
A continuación se muestra cómo el motor de inducción se adapta a las condiciones
de viento cuando se produce un escalón en su velocidad Figura 2:
0.49
0.48
0.47
w ref
w sal
velocidad (pu)
0.46
0.45
0.44
0.43
0.42
0.41
0.4
9
10
11
12
13
14
15
tiempo (s)
16
17
18
19
Figura 2. Evolución de la velocidad del motor asíncrono y la turbina eólica
Una de las ventajas de utilizar un control electrónico mediante PWM es la
disminución notable de armónicos en las corrientes del motor. En la Figura 3 se observa
que el rizado de la intensidad del motor es mínima:
25
20
intensidad (A)
15
10
5
0
-5
-10
-15
17.67
17.675
17.68
tiempo (s)
17.685
17.69
Figura 3. Ampliación de la corriente de estator del motor de inducción
También se obtuvieron resultados satisfactorios al ensayar el algoritmo de estimación
de la velocidad. Se ensayó un motor de inducción obligándole a ajustar su velocidad a
Resumen
vi
una cadena de pulsos de periodo ocho segundos. En la Figura 4 se muestran la
evolución de la velocidad estimada y medida con una dinamo:
velocidad (pu)
Velocidad capturada por la dinamo
0.4
0.3
0.2
0.1
2
4
6
8
10
12
14
tiempo (s)
Velocidad estimada
16
18
20
2
4
6
8
16
18
20
velocidad (pu)
0.5
0.4
0.3
0.2
0.1
10
12
tiempo (s)
14
Figura 4. Velocidad estimada del motor de inducción
Se aprecia que ambas gráficas son muy parecidas aunque el estimador ofrece
una señal con más ruido durante los transitorios de velocidad pero en cambio es muy
fiable durante el régimen permanente.
Summary
vii
Summary
Introduction
The objective of the present project is to improve and simplify the tests and
studies in the operation and control of electrical generators. A wind turbine generator
has been specifically tested.
To achieve this purpose, a simulator has been designed and proved in order to test
these generators under any situation of operation. In addition, some tests have been
carried out in the laboratory of electrical machines of ICAI to obtain results from
reality.
Solution raised
The solution uses the Simulink platform of the program Matlab as work frame.
Different models have been designed such as different PI controls and several models
which had been previously developed were integrated into a diagram such as a space
vector pulse width modulation (SVPWM), an induction motor, a DC machine and a
wind turbine.
The wind turbine model allows simulating real external conditions such as
the wind speed and the blade pitch. This model calculates a theoretical speed which is
used as a reference to control the asynchronous motor.
This motor is connected to a DC machine that works as a generator. Finally, the
power is discharged in an element.
The solution is shown in this diagram Figura 5:
Summary
viii
Figura 5. Diagram of the solution
Tests
The present project continues PFC 2004/2005 of César Aguiar which title was
"Emulador de Turbinas para Accionamiento de Generadores Eléctricos" where the
solution used an asynchronous motor controlled keeping constant the relation voltagefrequency V/F and driving a DC machine. In the present project, its final experiment
has been reproduced using bank 4 of the laboratory of electrical machines. During the
experiment, several variables have been acquired using the data acquisition board PCI
6024E and the real time system based on Real Time Windows Target included in
Matlab.
It has also been made the connection of an incremental encoder to the axis of bank 4
of the laboratory of electrical machines. However, it has not been finally used in the
project.
Finally, an algorithm has been implanted and validated to estimate the rotor speed of
an induction motor. Using the previous real time system, two filtered voltages and
currents were acquired to obtain accurate results.
Results
Some valuable results have been obtained with the simulations of the wind
turbine under different situations of operation.
In the next figure, it is shown how the induction motor adapts its speed to a step
the wind conditions Figura 6:
Summary
ix
0.49
0.48
0.47
w ref
w sal
velocidad (pu)
0.46
0.45
0.44
0.43
0.42
0.41
0.4
9
10
11
12
13
14
15
tiempo (s)
16
17
18
19
Figura 6. Induction motor and wind turbine speed
One of the advantages of using an electronic control with PWM is the decrease
of the harmonics in the motor currents as it is shown in Figura 7:
25
20
intensidad (A)
15
10
5
0
-5
-10
-15
17.67
17.675
17.68
tiempo (s)
17.685
17.69
Figura 7. Enlargement of the estator current
Some satisfactory results were obtained while testing the algorithm which estimates
speed. The asynchronous motor was forced to adapt its speed to a chain of pulses with a
Summary
x
period of eight seconds. In Figura 8 it is shown the estimated rotor speed and the
measured speed by a dynamo:
Measured speed
speed (pu)
0.4
0.3
0.2
0.1
2
4
6
8
10
12
time (s)
Estimated speed
2
4
6
8
14
16
18
20
14
16
18
20
speed (pu)
0.5
0.4
0.3
0.2
0.1
10
12
time (s)
Figura 8. Speed estimation
Both graphics are quite similar but the algorithm signal has some noise when
estimating transitory conditions. However, it is reliable in permanent conditions.
Índice
xi
Índice
1 INTRODUCCIÓN Y PLANTEAMIENTO DEL PROYECTO .................................................... 2
1.1 Prólogo ................................................................................................................. 2
1.2 Motivación y estado del arte............................................................................. 4
1.3 Objetivos ............................................................................................................ 14
1.4 Metodología y recursos ................................................................................... 16
2 DESARROLLO DE LOS MODELOS ........................................................................................... 20
2.1 Emlulador de una turbina por medio de un control Tensión –
Frecuencia (V/F) .............................................................................................. 20
2.1.1
Objetivos del PFC 2005
20
2.1.2
Descripción de la solución
20
2.1.3
Descripción de las tecnologías
23
2.1.3.1
Ordenador................................................................................................................................ 24
2.1.3.2
Actuador................................................................................................................................... 24
2.1.3.3
Generador ................................................................................................................................ 26
2.1.3.4
Otras herramientas:................................................................................................................. 28
2.1.4
Implantación
29
2.1.5
Protocolo de funcionamiento
30
2.1.5.1
Medidas de seguridad en Laboratorio. ................................................................................ 30
2.1.5.2
Listado del equipo necesario. ................................................................................................ 31
2.1.5.3
Montaje..................................................................................................................................... 32
2.2 Acoplamiento de un encoder incremental y conexión a la tarjeta. ........... 37
2.2.1
¿Qué es un encoder incremental?
37
2.2.2
Funcionamiento de un encoder
38
2.2.3
Elementos del acoplamiento al eje del encoder.
39
2.3 Control vectorial ............................................................................................... 41
2.3.1
Solución adoptada
41
2.3.2
Diseño del control vectorial
47
2.3.2.1
Diseño de los lazos de corriente ............................................................................................ 47
2.3.2.2
Diseño del lazo de velocidad................................................................................................. 52
2.3.3
Diseño de los lazos de corriente integrados en el lazo de velocidad
60
2.3.4
Diseño del PWM vectorial, inversor trifásico y motor de inducción.
63
2.3.5
Cálculo de la velocidad de deslizamiento y el correspondiente ángulo girado.
68
2.3.6
Control de la velocidad de un motor de inducción con un PWM vectorial.
69
2.3.7
Simulación completa de un aerogenerador
70
Índice
xii
2.4 Algoritmo de estimación de la velocidad ..................................................... 72
2.4.1
Concepto y descripción
72
2.4.2
Promedio de la velocidad del rotor
74
2.4.3
Bloque algoritmo de estimación de velocidad
76
2.4.4
Implantación en el laboratorio
76
3 RESULTADOS .................................................................................................................................. 80
3.1 Introducción ...................................................................................................... 80
3.2 Emlulador de una turbina por medio de un control Tensión –
Frecuencia (V/F) .............................................................................................. 81
3.3 Acoplamiento de un encoder incremental y conexión a la tarjeta. ........... 85
3.4 Control vectorial ............................................................................................... 86
3.4.1
Resultados de los lazos de corriente
86
3.4.2
Resultados del lazo de velocidad
87
3.4.3
Resultados de los lazos de corriente dentro del lazo de velocidad.
89
3.4.4
Resultados del PWM vectorial (SVPWM).
93
3.4.5
Resultados del control de velocidad utilizando un control vectorial.
95
3.4.6
Resultados de la simulación completa de un aerogenerador.
100
3.4.6.1
Golpe de viento ..................................................................................................................... 101
3.4.6.2
Viento escalonado ................................................................................................................. 106
3.4.6.3
Viento racheado..................................................................................................................... 108
3.5 Algoritmo de estimación de velocidad. ...................................................... 110
3.5.1
Resultados controlando la velocidad con Simulink.
110
3.5.2
Resultados controlando la velocidad con un potenciómetro.
114
4 CONCLUSIONES........................................................................................................................... 117
5 BIBLIOGRAFÍA.............................................................................................................................. 121
A ESQUEMAS DE SIMULACIÓN.................................................................................................. 125
B CÓDIGO .......................................................................................................................................... 135
C GLOSARIO...................................................................................................................................... 143
Introducción y planteamiento del proyecto
xiii
Índice de Figuras
Figura 1. Esquema simplificado la solución adoptada........................................................................ iv
Figura 2. Evolución de la velocidad del motor asíncrono y la turbina eólica ................................... v
Figura 3. Ampliación de la corriente de estator del motor de inducción .......................................... v
Figura 4. Velocidad estimada del motor de inducción ....................................................................... vi
Figura 5. Diagram of the solution ........................................................................................................viii
Figura 6. Induction motor and wind turbine speed ............................................................................ ix
Figura 7. Enlargement of the estator current........................................................................................ ix
Figura 8. Speed estimation ....................................................................................................................... x
Figura 9. Esquema simplificado de la generación de energía eléctrica.............................................. 2
Figura 10. Evolución de la energía mundial consumida en función del desarrollo de los
países y previsión hasta 2050........................................................................................................ 4
Figura 11. Esquema simplificado que muestra las sucesivas transformaciones de la energía
hasta ser eléctrica ........................................................................................................................... 5
Figura 12. Relación entre la velocidad del viento en m/s y la potencia en W/m2 .......................... 7
Figura 13. Distribución weibull de la velocidad del viento................................................................. 7
Figura 14. Componentes principales de un aerogenerador................................................................. 8
Figura 15. Evolución de la potencia eólica instalada en España entre 1990 y 2004........................ 12
Figura 16. Esquema básico de una instalación de generación eléctrica ........................................... 16
Figura 17. Diagrama de bloques simplificado del objetivo a conseguir. ......................................... 18
Figura 18. Secuencia de sustitución de elementos reales por simulados......................................... 21
Figura 19. Diagrama descriptivo de la solución completa adoptada en el simulador del
aerogenerador............................................................................................................................... 23
Figura 20. Fotografía del variador V/F Unidrive LV 3201 utilizado ............................................... 25
Figura 21. Fotografía del motor de inducción utilizado .................................................................... 26
Figura 22. Fotografía del motor de continua utilizado ...................................................................... 27
Figura 23. Fotografía de la dinamo acoplada al eje y las resistencias de cursor para tomar la
medida del par ............................................................................................................................. 28
Figura 24. Esquema de simulación y adquisición utilizado .............................................................. 29
Figura 25. Conexionado de la máquina de inducción y conexionado del rotor ............................. 32
Figura 26. Variador y resistencia de carga ........................................................................................... 33
Figura 27. Conexionado de la máquina de continua .......................................................................... 33
Figura 28. Panel de control del variador .............................................................................................. 35
Figura 29. Esquema de conexión para realizar el experimento ........................................................ 36
Figura 30. Discos de un encoder............................................................................................................ 37
Figura 31. Disco de un encoder y forma de onda entregada............................................................. 38
Índice de Figuras
xiv
Figura 32. Placa de características del encoder ................................................................................... 39
Figura 33. Acoplamiento utilizado ....................................................................................................... 39
Figura 34. Conector utilizado que lleva las señales del encoder a la placa ..................................... 40
Figura 35. Casquillo para unir el acoplamiento y el eje ..................................................................... 40
Figura 36. Fotografía de la tarjeta.......................................................................................................... 40
Figura 37. Transformaciones de Clarke (abc→αβ o DQ) y Park (αβ o DQ→dq) utilizadas
para el diseño del control vectorial............................................................................................ 41
Figura 38. Diagrama de bloques del lazo de control de corrientes .................................................. 42
Figura 39. Diagrama de bloques del lazo de control de velocidad................................................... 43
Figura 40. Sectores y posibles estados del vector tensión.................................................................. 44
Figura 41. Cálculo del vector tensión según el sector......................................................................... 45
Figura 42. Descomposición del vector intermedio situado en el sector I ........................................ 46
Figura 43. Inversor trifásico cuyos interruptores se controlan en el PWM vectorial ..................... 47
Figura 44. Circuito equivalente de una máquina de inducción en ejes dq...................................... 48
Figura 45. Lazo de corrientes del sistema estudiado.......................................................................... 51
Figura 46. Lazo de velocidad del sistema estudiado ......................................................................... 54
Figura 47. Evolución de un sistema general ........................................................................................ 57
Figura 48. Evolución de la velocidad del motor de inducción.......................................................... 57
Figura 49. Evolución de la velocidad filtrada del motor de inducción............................................ 58
Figura 50. Curva que muestra la relación entre el flujo del rotor y la velocidad mecánica de
rotación.......................................................................................................................................... 61
Figura 51. Lazo de velocidad simplificado en el que están integrados los lazos de velocidad .... 62
Figura 52. Modelo de simulación completo en el que los lazos de corrientes están integrados
en el lazo de velocidad ................................................................................................................ 63
Figura 53. Bloque usado en Simulink para la modulación de ancho de pulso vectorial............... 64
Figura 54. Bloque usado en Simulink para calcular las señales de disparo del inversor .............. 65
Figura 55. Bloque usado en Simulink que simula un inversor trifásico ideal................................. 65
Figura 56. Bloques usados en Simulink que simulan el funcionamiento de un motor de
inducción en cuyo eje se ha acoplado una carga resistente.................................................... 66
Figura 57. Bloque utilizado para calcular el seno y coseno de ángulos ........................................... 66
Figura 58. Bloques utilizados en Simulink para realizar las transformaciones de Park y
Clarke............................................................................................................................................. 67
Figura 59. Esquema utilizado en la simulación que representa el control vectorial, un motor
de inducción y una carga ............................................................................................................ 68
Figura 60. Algoritmo para calcular el ángulo entre el flujo de rotor y la fase R ............................. 69
Figura 61. Esquema simplificado del control de velocidad............................................................... 70
Figura 62. Esquema simplificado del aerogenerador ......................................................................... 71
Figura 63. Esquema completo de simulación ...................................................................................... 71
Introducción y planteamiento del proyecto
xv
Figura 64. Circuito equivalente de una máquina de inducción en ejes dq...................................... 72
Figura 65. Bloque algoritmo de estimación de velocidad.................................................................. 76
Figura 66. Filtro RC utilizado para eliminar el ruido ......................................................................... 77
Figura 67. Filtro utilizado para eliminar el ruido ............................................................................... 78
Figura 68. Evolución de la velocidad del rotor en rpm a lo largo del tiempo................................. 81
Figura 69. Evolución de la velocidad del rotor en rad/s ................................................................... 82
Figura 70. Evolución de la corriente de la máquina de continua en amperios ............................... 83
Figura 71. Evolución de par de la máquina de continua en Nm ...................................................... 84
Figura 72. Detalle del acoplamiento del encoder al eje del motor.................................................... 85
Figura 73. Montaje completo del acoplamiento del encoder al eje del motor................................. 85
Figura 74. Lazo de corrientes del sistema estudiado.......................................................................... 86
Figura 75. Evolución de la intensidad en el lazo de corriente........................................................... 87
Figura 76. Lazo de velocidad del sistema estudiado ......................................................................... 88
Figura 77. Evolución de la velocidad de rotación ............................................................................... 88
Figura 78. Modelo de simulación completo en el que los lazos de corrientes están integrados
en el lazo de velocidad ................................................................................................................ 89
Figura 79. Evolución de la velocidad y escalón de referencia........................................................... 90
Figura 80. Evolución de la intensidad de estator en eje d.................................................................. 91
Figura 81. Evolución de la intensidad de estator en eje q.................................................................. 91
Figura 82. Evolución de la tensión usd................................................................................................. 92
Figura 83. Evolución de la tensión usq................................................................................................. 92
Figura 84. Esquema utilizado en la simulación que representa el control vectorial, un motor
de inducción y una carga ............................................................................................................ 93
Figura 85. Alimentación al motor de inducción.................................................................................. 94
Figura 86. Ampliación de la alimentación al motor de inducción.................................................... 94
Figura 87. Espectro en frecuencia de la alimentación del motor de inducción............................... 95
Figura 88. Esquema simplificado del control de velocidad............................................................... 95
Figura 89. Evolución de la velocidad del motor de inducción.......................................................... 96
Figura 90. Evolución de la intensidad isd ............................................................................................ 97
Figura 91. Ampliación de la intensidad isd ......................................................................................... 97
Figura 92. Evolución de la intensidad isq y ampliación de la misma .............................................. 98
Figura 93. Ampliación de la intensidad isq ......................................................................................... 98
Figura 94. Evolución de la intensidad de estator iSr .......................................................................... 99
Figura 95. Detalle de la evolución de la intensidad de estator iSr.................................................... 99
Figura 96. Esquema completo de simulación .................................................................................... 100
Figura 97. Escalón de viento ................................................................................................................ 101
Figura 98. Evolución de la velocidad de rotación de la turbina...................................................... 101
Figura 99. Evolución de la velocidad de rotación de la turbina y del motor de inducción ........ 102
Índice de Figuras
xvi
Figura 100. Evolución de la corriente isd a lo largo del tiempo...................................................... 103
Figura 101. Evolución de la corriente isq a lo largo del tiempo ...................................................... 103
Figura 102. Evolución de la corriente del estator del motor de inducción .................................... 104
Figura 103. Ampliación de la corriente de estator del motor .......................................................... 104
Figura 104. Tensión de alimentación al motor de inducción........................................................... 105
Figura 105. Ampliación de la tensión de alimentación del motor .................................................. 105
Figura 106. Potencia entregada por el generador ............................................................................. 106
Figura 107. Sucesión de escalones de viento ..................................................................................... 106
Figura 108. Evolución de la velocidad de la turbina eólica ante viento escalonado .................... 107
Figura 109. Evolución de la velocidad de la turbina eólica y del motor........................................ 107
Figura 110. Viento racheado ................................................................................................................ 108
Figura 111. Evolución de la velocidad de la turbina eólica ante viento racheado........................ 108
Figura 112. Evolución de la velocidad de la turbina eólica y del motor de inducción ................ 109
Figura 113. Tensiones filtradas VSrs y VSst....................................................................................... 110
Figura 114. Corrientes filtradas iSr e iSs............................................................................................. 111
Figura 115. Ampliación de las tensiones filtradas VSrs y VSst ....................................................... 111
Figura 116. Ampliación de las corrientes filtradas iSr e iSs............................................................. 112
Figura 117. Velocidad capturada por la dinamo y estimada........................................................... 112
Figura 118. Error de la velociad estimada......................................................................................... 113
Figura 119. Velocidad medida y estimada......................................................................................... 114
Figura 120. Error en la medida ............................................................................................................ 115
Índice de Tablas
xvii
Índice de Tablas
Tabla 1. Componentes principales de un aerogenerador y funcionamiento. ................................... 9
Tabla 2. Ventajas de la utilización de la energía eólica con respecto a otras tecnologías
convencionales ............................................................................................................................. 10
Tabla 3. Inconvenientes de la utilización de la energía eólica con respecto a otras tecnologías. . 11
Tabla 4. Clasificación de los aerogeneradores en función de la potencia e imágenes. .................. 13
Tabla 5. Características del variador V/F. ........................................................................................... 25
Tabla 6. Características de la máquina de inducción. ........................................................................ 26
Tabla 7. Características de la máquina de continua............................................................................ 27
1
Introducción y planteamiento
del proyecto
1 Introducción y planteamiento del proyecto
1
2
Introducción y planteamiento del proyecto
1.1
Prólogo
El presente proyecto nace de la idea de mejorar y simplificar los estudios en el
funcionamiento y control de generadores de energía eléctrica. Para ello se pretende
completar el proyecto fin de carrera de César Aguiar del año 2005 y desarrollar nuevos
conceptos.
Normalmente, cuando se precisa realizar estudios o ensayos en plantas de
generación, se suelen utilizar las propias instalaciones o se estudian y prueban por
separado el funcionamiento de dichos generadores, lo cual puede obligar a detener la
producción de energía eléctrica durante varios días con la consecuente penalización
económica.
El proyecto plantea el desarrollo de un simulador que permita someter al generador,
en laboratorio, a las mismas condiciones que tendría en caso de estar en uno de sus
escenarios de generación típicos. En el caso que concierne a este proyecto se propone la
simulación de una turbina en un aerogenerador.
Para ello se ha utilizado un modelo dinámico de la turbina, que programado y
controlado por un ordenador permite recrear las condiciones a las que se enfrentaría de
estar funcionando en un parque eólico real.
El modelo típico de una instalación de energía eléctrica que usen generadores
eléctricos (todos excepto la energía fotovoltaica) responde de manera simplificada al
esquema mostrado en la Figura 9:
Figura 9. Esquema simplificado de la generación de energía eléctrica.
1 Introducción y planteamiento del proyecto
3
En materia de generadores eólicos, la velocidad de rotación de las palas de un
aerogenerador depende de dos variables fundamentales: la velocidad del viento y el
ángulo de ataque de los álabes (en inglés Pitch angle). Se dispondrá de un control cuya
función será calcular las referencias necesarias para que un actuador simule físicamente
el funcionamiento de la turbina eólica. Finalmente, accionará mecánicamente un
generador eléctrico por medio de un eje.
Inicialmente se pensó en utilizar variador tensión-frecuencia (V/F) modificado para
que trabajase con un control vectorial, pero esta opción tuvo que ser desechada ya que
dicho variador se averió desafortunadamente. Originariamente, este variador excitaría
un motor asíncrono controlado por medio de un sistema en lazo cerrado con varios
controles proporcionales integrales (control PI).
Tal y como ocurre en un parque real, si la carga varía con el tiempo, el sistema se
debe regular automáticamente para adaptarse a los cambios que puedan darse en las
condiciones externas. De este modo incrementará o disminuirá la potencia entregada al
generador hasta conseguir en un tiempo razonablemente corto un régimen estable.
Todo el desarrollo e implantación se ha realizado utilizando un banco de máquinas
eléctricas en el laboratorio de máquinas eléctricas de ICAI. También se ha requerido un
ordenador con una tarjeta de adquisición de datos para gobernar el sistema en tiempo
real y en un principio un actuador V/F modificado como ya se ha comentado.
En los capítulos siguientes se irán comentando cada una de las partes que se han
desarrollado en esta breve introducción con más detalle, así como la justificación de
cada una de las soluciones adoptadas.
Se incluye asimismo un glosario para facilitar la comprensión de cada uno de los
capítulos y una recopilación de los esquemas de simulación utilizados.
1 Introducción y planteamiento del proyecto
1.2
4
Motivación y estado del arte
Durante el transcurso de la historia, el hombre ha utilizado diversos tipos de energía
para desarrollar sus actividades: hidráulica, mecánica, térmica, etc. Pronto se percató de
las limitaciones de esto tipo de energías, su transporte era una tarea casi imposible y en
el mejor de los casos ineficiente. Por esto, cuando se empezó a utilizar la energía
eléctrica, su expansión hasta nuestros días ha sido vertiginosa.
El consumo de energía eléctrica crece cada año en el mundo como se muestra en la
Figura 10. Los países desarrollados demandan cada vez más energía para todo tipo de
actividades por lo que la humanidad debe usarla con más eficiencia. Por otra parte, hay
que ser consciente de que el mundo en vías de desarrollo necesita más energía para
afrontar sus necesidades más acuciantes. El reto con que se enfrenta la humanidad es
satisfacer la creciente demanda de energía y, al mismo tiempo, afrontar la amenaza
igualmente urgente del cambio climático.
Figura 10. Evolución de la energía mundial consumida en función del desarrollo de
los países y previsión hasta 2050.
El éxito de esta energía se debe a una serie de ventajas que a continuación se citan:
•
Facilidad de transporte: es relativamente sencillo conducir la electricidad por
medio de líneas eléctricas desde los centros de generación a centros de
consumo, pudiendo estar separados por miles de kilómetros.
1 Introducción y planteamiento del proyecto
•
5
Reducción de pérdidas: las pérdidas en el transporte son pequeñas si las
comparamos con otras formas de energía.
•
Limpia: en los centros de consumo, su huella es inapreciable, aunque no
podemos decir lo mismo de las plantas de generación.
Hasta hace unas décadas, las únicas fuentes que utilizó el ser humano para producir
energía eléctrica fueron el petróleo, el carbón y el gas. Estos combustibles primarios son
limitados y generan una contaminación que a la larga puede provocar el cambio
climático, o al menos acelerarlo.
Las economías actuales tienen una gran dependencia de la electricidad de modo que
es inconcebible la sociedad individual sin consumo de energía eléctrica. Es tal su
importancia que el consumo de energía se ha convertido en un indicador indiscutible del
nivel de desarrollo de un país.
El modo en que se produce energía eléctrica es básicamente el mismo para todas las
tecnologías excepto la fotovoltaica. Se convierte una energía natural como un salto de
agua o un combustible en energía mecánica lineal, ésta en una energía mecánica rotativa
por medio de una turbina, y finalmente se transforma en energía eléctrica en
generadores síncronos o asíncronos. Un esquema simplificado se muestra en la Figura
11.
Figura 11. Esquema simplificado que muestra las sucesivas transformaciones de la
energía hasta ser eléctrica
Así, en una central térmica ya sea nuclear o convencional se produce un intercambio
de energía térmica en las calderas y posteriormente cinética en las turbinas. En una
central hidroeléctrica es la energía cinética del agua la que al impactar sobre los álabes
de la turbina genera el par necesario para generar electricidad. En el caso de los
aerogeneradores utilizan la fuerza del viento para mover las palas del molino.
1 Introducción y planteamiento del proyecto
6
El creciente consumo de energía en la sociedad obliga a desarrollar nuevas
tecnologías para hacer frente a la demanda. En los últimos años, las tecnologías
llamadas renovables han experimentado un gran impulso principalmente por la
conciencia ecológica de las sociedades y las primas otorgadas por el gobierno.
En el caso que nos ocupa, la instalación a estudiar será un generador eólico que
intercambia energía cinética entre el viento y la turbina eólica. De este modo el
generador dispondrá de una energía mecánica de rotación para producir electricidad. La
tecnología usada en la práctica se detallará a continuación.
La energía eólica es aprovechada básicamente por un sistema de un rotor que gira a
medida que le atraviesa el viento. A continuación se expondrán a grandes rasgos una
serie de parámetros acerca de la tecnología necesaria para entender la generación eólica.
Un aerogenerador aprovecha la potencia del viento, que depende principalmente de
tres factores:
1. Área barrida por el viento (A) [m]
2. Densidad del aire seco (ρ) = 1.225 [kg/m3] (kilogramos por metro cúbico, a la
presión atmosférica promedio a nivel del mar y a 15° C).
3. Velocidad del viento (V_viento) [m/s]
La potencia teórica que puede utilizar un generador eólico es la que se muestra
en la siguiente ecuación.
P=
1
ρ AV 3
2
La velocidad del viento es un factor muy importante para la cantidad de energía que
un aerogenerador puede transformar en electricidad: el total de energía que posee el
viento varía con el cubo de la velocidad media del viento. Así, si la velocidad del viento
se duplica la cantidad de energía que contenga será 23 = 2 x 2 x 2 = ocho veces mayor.
A continuación se muestra una gráfica donde se observa como varía la potencia
entregada a la turbina con la velocidad media del viento Figura 12:
(1)
1 Introducción y planteamiento del proyecto
7
Figura 12. Relación entre la velocidad del viento en m/s y la potencia en W/m2
Resulta obvio que el viento no siempre se mantiene constante en dirección y valor de
magnitud, es más bien una variable aleatoria, algunos modelos han determinado que el
viento es una variable aleatoria con distribución weibull como la que muestra la Figura
13.
Figura 13. Distribución weibull de la velocidad del viento
Por esta razón será necesario un sistema que regule la potencia entregada por el
viento, de modo que según las necesidades del momento se modifiquen variables como
el ángulo de ataque o la orientación del molino para aumentar o disminuir la energía
intercambiada.
Desafortunadamente, no toda la potencia del viento puede ser capturada por un
aerogenerador sino sólo una fracción que viene dada por el factor Cp, llamado
coeficiente de potencia. Este coeficiente de potencia tiene un valor máximo teórico de
1 Introducción y planteamiento del proyecto
8
59,3% denominado límite de Betz. Por lo tanto este coeficiente de potencia indica con
qué eficiencia el aerogenerador convierte la energía del viento.
Los primeros aerogeneradores tenían rendimientos del 10%, pero los más modernos
utilizan sistemas de control de manera que operan siempre con la máxima eficiencia
aerodinámica alcanzando valores de rendimiento próximos al 50%.
El número de palas utilizado normalmente suele ser de tres. Idealmente, se obtendría
mayor rendimiento cuanto menor número de palas, por lo que un aerogenerador de una
sola pala sería el más adecuado, sin embargo, su par de arranque sería muy pobre. Si se
aumenta el número de álabes, la estela que deja una pala es recogida por la pala
siguiente, lo que hace que ésta se frene. De esta manera, se adopta una solución óptima
de rotor de 3 palas.
En la siguiente tabla se describirán brevemente los componentes fundamentales de
un aerogenerador real como el de la Figura 14 sin entrar en detalle:
Figura 14. Componentes principales de un aerogenerador.
Góndola
Contiene los componentes clave del aerogenerador, incluyendo el
multiplicador y el generador eléctrico. El personal de servicio puede
acceder a la góndola desde la torre de la turbina
Palas
del Capturan el viento y transmiten su potencia hacia el buje. Cada pala
rotor
puede medir más de 20 metros de longitud y su diseño es muy
parecido al del ala de un avión
1 Introducción y planteamiento del proyecto
9
El buje del rotor está acoplado al eje de baja velocidad del
Buje
aerogenerador
Eje de baja Conecta el buje del rotor al multiplicador. El rotor gira normalmente
velocidad
muy lento, de unas 15 a 30 revoluciones por minuto (r.p.m.)
Multiplicador
Permite que el eje de alta velocidad que está aguas abajo gire unas 50
veces más rápido que el eje de baja velocidad
Eje
alta Gira
de
aproximadamente
a
1.500
r.p.m.
lo
que
permite
el
velocidad
funcionamiento de un generador eléctrico de dos pares de polos
Generador
Suele ser un generador asíncrono. En los aerogeneradores modernos la
eléctrico
potencia máxima suele estar entre 500 y 1.500 Kw
Controlador
Ordenador que continuamente monitoriza las condiciones del
electrónico
aerogenerador y que controla el mecanismo de orientación
de Contiene un ventilador eléctrico utilizado para enfriar el generador
Unidad
refrigeración
eléctrico
Torre
Soporta la góndola y el rotor. Es una ventaja disponer de una torre
alta, dado que la velocidad del viento aumenta conforme nos alejamos
del nivel del suelo. Suele alcanzar una altura de 40 a 60 metros
Mecanismo de Está activado por el controlador electrónico, que vigila la dirección del
orientación
viento utilizando la veleta
Anemómetro y Las señales electrónicas del anemómetro son para conectar el
veleta
aerogenerador cuando el viento alcanza 5 m/s. y desconectarlo si
excede de 25 m/s
Tabla 1. Componentes principales de un aerogenerador y funcionamiento.
1 Introducción y planteamiento del proyecto
10
La tecnología eólica se ha desarrollado en los últimos años a pasos agigantados
gracias a las primas que recibe de los gobiernos y a una serie de ventajas frente a otra
serie de fuentes energéticas convencionales. A continuación se enumeraran esas
ventajas y los inconvenientes de la utilización del viento como energía primaria.
Ventajas
Procede indirectamente del sol, que calienta el aire y ocasiona el viento.
Se renueva de forma continua.
Es inagotable.
Los recursos energéticos basados en fuentes renovables como la energía eólica
son potencialmente ilimitados.
Es limpia. No contamina. La generación de electricidad a partir del viento no
produce gases tóxicos, no contribuye al efecto invernadero, ni a la lluvia ácida. Cada
Kw.h de electricidad, generada por energía eólica en lugar de carbón, evita la
emisión de un Kilogramo de dióxido de carbono, CO2, a la atmósfera.
No origina productos secundarios peligrosos ni residuos contaminantes.
Es autóctona y universal. Existe en todo el mundo.
Cada vez es más barata conforme avanza la tecnología.
Permite el desarrollo sin expoliar la naturaleza.
Las instalaciones son fácilmente reversibles. No deja huella.
Tabla 2. Ventajas de la utilización de la energía eólica con respecto a otras
tecnologías convencionales
1 Introducción y planteamiento del proyecto
11
Inconvenientes
La fuerza del viento es poco previsible e intermitente.
Las fechas con mayor consumo energético (días de mucho calor o intenso frío)
suele coincidir con la ausencia de viento por lo que se requieren energías
alternativas que cubran la demanda.
Sus limitaciones técnicas hacen de esta tecnología una fuente de generación
eléctrica carente de fiabilidad para operar como base en un sistema de generación.
Los sistemas de generación, requieren la utilización de grandes superficies de
terreno, al que de uno u otro modo afectan tanto funcional como visualmente.
Los vientos de mejor calidad energética (mayor potencia y menor variación) están
por regla general alejados de la superficie, lo cual obliga a desarrollar torres de gran
altura con palas de grandes diámetros.
Tabla 3. Inconvenientes de la utilización de la energía eólica con respecto a otras
tecnologías.
Debido al gran auge experimentado en las energías renovables cada vez es más
frecuente el estudio y desarrollo de sus tecnologías. El estudio de las estrategias de
control se hace cada vez más importante a la hora de mejorar el funcionamiento de las
turbinas para hacer frente a problemas como el encendido o apagado, conexión o
desacoplo, etc.
Este proyecto pretende resolver el problema del estudio en laboratorio de los
generadores, emulando en un entorno virtual la instalación que permite adquirir de una
u otra manera energía transformándola en energía cinética que utilice el generador.
La idea es conseguir montar el generador de energía eléctrica en un laboratorio sin
necesidad de disponer del resto de la instalación. De esta forma será un generador el que
simule el entorno restante para poder en un futuro realizar pruebas en dichos
generadores en condiciones en las que de otra forma sería difícil de realizar.
1 Introducción y planteamiento del proyecto
12
El proyecto se centra en generadores eólicos aunque es sencillo caer en la cuenta de
que si se consigue simular dicho entorno, el resto de entornos de generación, ya sea
turbinas utilizadas en generadores hidráulicos o térmicos, serían relativamente sencillos
de conseguir.
El desarrollo tecnológico sobre esta materia es continuo, y como dato de ello es el
constante incremento de la potencia producida gracias a la energía del viento a lo largo
de los últimos años en la Figura 15 se muestra la evolución de la potencia eólica
instalada en España hasta el año 2004. Se prevé que la siga aumentando su importancia
según pasan los años.
Figura 15. Evolución de la potencia eólica instalada en España entre 1990 y 2004
Por último, se va a presentar una clasificación de las diferentes tecnologías existentes
en la actualidad en función de la potencia desarrollada. En ella se expondrán
brevemente sus características más relevantes.
1 Introducción y planteamiento del proyecto
Pequeña
13
Superficie captación menor de 40m2
potencia
Diámetro de rotor inferior a 7m
P <= 10 kW
Potencia unitaria inferior a 10kW
Generador de imanes permanentes
Media potencia
Área barrida entre 40 y 1250m
10<P<=500kW
Diámetro de rotor entre 7 y 40m
Potencia de 10 a 500 kW (10–13m/s)
Altura del buje entre 12 y 50 m
Principalmente horizontal y tripala
Gran potencia
Área barrida entre 1250 y 10200m
P > 500kW
Diámetro del rotor entre 40 y 112 m
Pot de 500 a 5000 kW (10–13m/s)
Altura del buje entre 50 y 124m
Principalmente y tripala
Tabla 4. Clasificación de los aerogeneradores en función de la potencia e imágenes.
Antes de concluir esta sección es necesario comentar que los aerogeneradores suelen
ser de ejes horizontales aunque también existen de eje vertical. La potencia de estos
últimos es menor pero tienen la ventaja de que no es necesario un sistema de orientación
hacia el viento.
1 Introducción y planteamiento del proyecto
1.3
14
Objetivos
Inicialmente se propuso realizar un proyecto fin de carrera con los siguientes
objetivos:
Leer, estudiar y comprender el PFC 2004/2005 de César Aguiar titulado
Emulador de turbinas para accionamiento de generadores eléctricos.
Reproducción del experimento realizado por César en la última etapa de su
proyecto y obtener los resultados pertinentes en el laboratorio de máquinas
eléctricas de ICAI.
Diseño del control vectorial para gobernar un motor de inducción que hará las
veces de actuador del sistema. En esta tarea se incluye elegir las estrategias a
seguir, diseñar los distintos controles PI y conseguir que el conjunto funcione
de acuerdo con la realidad.
Acoplamiento de un encoder incremental al eje de las máquinas eléctricas
utilizadas. Además se deberá escribir un programa para obtener la velocidad
de rotación del eje por medio del encoder.
Implantación
del sistema desarrollado por ordenador en el banco de
máquinas eléctricas del laboratorio y obtener las medidas y conclusiones
importantes para el proyecto. Esta tarea es la principal a realizar en el
proyecto y la que más esfuerzo requiere.
Este proyecto necesita un variador V/F modificado por un compañero que realiza su
proyecto paralelamente. Debido a causas externas a este proyecto, este variador V/F
modificado ha sufrido una avería por lo que no ha sido posible utilizarlo en la
realización del proyecto. Por esta razón se han modificado alguno de los objetivos por
lo que los objetivos del proyecto serán finalmente los siguientes:
Leer, estudiar y comprender el PFC 2004/2005 de César Aguiar titulado
Emulador de turbinas para accionamiento de generadores eléctricos.
1 Introducción y planteamiento del proyecto
15
Reproducción del experimento realizado por César en la última etapa de su
proyecto y obtener los resultados pertinentes en el laboratorio de máquinas
eléctricas de ICAI.
Diseño del control vectorial para gobernar un motor de inducción que hará las
veces de actuador del sistema. En esta tarea se incluye elegir las estrategias a
seguir, diseñar los distintos controles PI y conseguir que el conjunto funcione
de acuerdo con la realidad.
Acoplamiento de un encoder incremental al eje de las máquinas eléctricas
utilizadas. Esta tarea incluye la conexión del encoder a una tarjeta informática
realizada en ICAI.
Implantación de un algoritmo que estima la velocidad de rotación en el
banco de máquinas eléctricas, comprobando su validez con una dinamo
tacométrica. El encoder no se ha podido utilizar por problemas ajenos a este
proyecto.
1 Introducción y planteamiento del proyecto
1.4
16
Metodología y recursos
Para centrar las ideas acerca de lo que pretende este proyecto, se muestra a
continuación un esquema básico de un aerogenerador real, Figura 16.
Viento
Energía
Energía
eléctrica
mecánica
Figura 16. Esquema básico de una instalación de generación eléctrica
La solución contemplada sustituye la instalación comprendida entre los álabes donde
se ataca el viento hasta el eje donde se acopla el generador eléctrico por un modelo
dinámico y un actuador controlado en lazo cerrado. De este modo se podrán realizar
ensayos y pruebas sin necesidad de acudir físicamente al emplazamiento donde se
encuentra el parque eólico.
En el proyecto se abarcan distintos objetivos que se detallarán más adelante, aunque
a continuación se enumerarán rápidamente los recursos más importantes:
Un motor eléctrico asíncrono que se utilizará como accionamiento que simula
el comportamiento de la turbina eólica.
Un motor eléctrico de continua que se utilizará como generador dependiendo
del escenario en el que se sitúe la simulación.
El programa Matlab 7.0.1 y la plataforma Simulink donde se desarrollarán los
diferentes modelos, así como el control vectorial y los diferentes controles PI.
1 Introducción y planteamiento del proyecto
17
Variador tensión-frecuencia.
Tarjeta de adquisición de datos PCI 6024E.
Encoder incremetal.
Modelo dinámico del aerogenerador para su uso como estimador de la
referencia de velocidad, siendo la velocidad del viento y el ángulo de ataque
de los álabes los datos de entrada.
Resto de modelos para su uso en la consecución de controles, pruebas
anteriores a la implantación, algoritmos, etc.
Para comprender los siguientes capítulos se comentarán ahora los pasos que se deben
seguir para llegar al principal objetivo, un control vectorial con modulación de ancho de
pulso. La emulación de la turbina eólica se realizará siguiendo el siguiente esquema y
como ayuda a la comprensión se muestra la Figura 17:
1º Modelado del comportamiento de la turbina eólica de manera que al ordenador se
introduzca la velocidad del viento y la posición de los álabes del generador eólico, de
modo que el modelo entregue una referencia de velocidad al resto del sistema.
2º Diseño de un control vectorial, que incluye los diferentes controles PI y la
integración de la modulación de ancho de pulso vectorial (SVPWM).
3º El control anterior entrega unas tensiones al motor de inducción que hace las
veces de actuador. El motor gira a una velocidad determinada dependiendo de la
alimentación y genera un par mecánico que se transmite al generador.
4ª Un generador, en este caso una máquina de continua, alimenta una carga variable,
que modifica el par resistente de la instalación.
1 Introducción y planteamiento del proyecto
Figura 17. Diagrama de bloques simplificado del objetivo a conseguir.
18
2
Desarrollo de los modelos
2 Desarrollo de los modelos
2
20
Desarrollo de los modelos
2.1
Emlulador de una turbina por medio de un control Tensión –
Frecuencia (V/F)
Este apartado pretende aclarar las ideas sobre los objetivos del proyecto
desarrollado por César Aguiar y detallar cada una de las partes que componen una
instalación de generación eólica, así como las soluciones adoptadas para simular el
entorno virtual.
2.1.1
Objetivos del PFC 2005
Los
objetivos
principales
del
proyecto
“Emulador
de
Turbinas
para
Accionamientos de Generadores Eléctricos” fueron los siguientes:
Simulación del entorno en que se encuentran diferentes tipos de turbinas
para la generación eléctrica, centrándose especialmente en turbinas
eólicas.
Estudio de las posibilidades del laboratorio de máquinas eléctricas de
ICAI para conseguir un banco de pruebas, prototipo.
Diseño de modelos y controles necesarios (control PI )
Adecuación del material, implantación y pruebas sobre el prototipo. Este segundo
capítulo sólo tiene como objeto mostrar cómo quedaría un capítulo adicional.
2.1.2
Descripción de la solución
A continuación se expondrán brevemente el camino que se siguió en el PFC
2005/2006.
2 Desarrollo de los modelos
Figura 18. Secuencia de sustitución de elementos reales por simulados
Atendiendo al esquema que se presenta en la se reconocen tres zonas
diferenciadas que se abordan seguidamente.
ZONA 1 Aerogenerador real que se pretende emular
ZONA 2 Solución adoptada
ZONA 3 Elementos físicos de la implantación
Este apartado pretende mostrar cómo se resolvió el problema de emular una
turbina eólica con los recursos de que se disponen. Para ello se utilizó el laboratorio
21
2 Desarrollo de los modelos
de máquinas eléctricas de ICAI para recrear el entorno en que se encuentra un
aerogenerador.
Se pensó un modelo para simular las condiciones externas a las que se enfrenta un
generador eólico. El modelo tiene dos variables de entrada que es necesario fijar:
velocidad del viento (V_viento) y el ángulo de ataque del viento sobre las palas del
molino (Pitch angle). Con estos datos el modelo elabora una velocidad rotativa de
referencia que es la que el actuador debe seguir.
La velocidad calculada se introduce en un variador tensión-frecuencia que
automáticamente genera las tensiones adecuadas.
Se pensó en utilizar un motor de inducción que, a modo de actuador, seguirá la
referencia de velocidad. Este motor está conectado al variador del cual recibe las
tensiones generadas por éste.
De esta manera el eje del motor debe girar a la velocidad deseada y arrastra un
generador eléctrico que está acoplado mecánicamente por medio del propio eje.
El generador eléctrico será en este caso una máquina de continua que a su vez
descargará la energía sobre una carga que será básicamente una serie de resistencias
regulables.
De esta instalación se necesitan valores medidos directamente: la velocidad y el
par en el eje. Para obtenerlos se procederá del siguiente modo:
La velocidad se capturará por medio de una dinamo tacométrica. Esta
pequeña máquina acoplada al eje de rotación común proporciona una
tensión entre sus bornas proporcional a la velocidad de giro. Será
necesario por lo tanto hallar la constante adecuada para introducirla en
el modelo.
Para calcular el par se medirá la intensidad que entrega la máquina de
continua a la carga y con las constantes adecuadas se introduce también
en el modelo.
22
2 Desarrollo de los modelos
23
Por último es necesario decir que estas dos señales se introducen por medio de
una tarjeta de adquisición de datos.
2.1.3
Descripción de las tecnologías
Una vez se han planteado y abordado los objetivos que se persiguen, es el
momento de describir las tecnologías y máquinas utilizadas para la realización de
este apartado del proyecto.
Figura 19. Diagrama descriptivo de la solución completa adoptada en el simulador
del aerogenerador.
En este esquema de la Figura 19 se aprecia que el simulador se compone de tres
grandes bloques principales:
Ordenador: se diseñaron y programaron los modelos del aerogenerador,
los controles y las señales de entrada y de salida.
Actuador: formado por un variador tensión-frecuencia y un motor de
inducción.
Generador: compuesto por una máquina de continua y una serie de
resistencias que hacen la función de una carga.
Además se necesitan otras herramientas para el correcto funcionamiento de la
instalación como los sensores de velocidad angular y de intensidad (para capturar el
par) y la tarjeta de adquisición de datos.
A continuación se detallan cada una de las partes anteriores:
2 Desarrollo de los modelos
2.1.3.1
Ordenador
Se ha utilizado como plataforma de desarrollo tanto de los modelos dinámicos
necesarios para el funcionamiento del simulador como para los modelos dinámicos
para realizar los experimentos en el banco del laboratorio.
Para ello se ha utilizado la plataforma Simulink incluida en el programa Matlab,
en concreto la versión 7.0.1. Asimismo se emplea el entorno de adquisición de datos
en tiempo real Real Time Windows Target (RTWT).
Seguidamente se describirán brevemente los diferentes modelos usados para la
implantación:
2.1.3.1.1
Aerogenerador:
Es un modelo dinámico ya construido por uno de los directores de proyecto que
relaciona la velocidad del viento (Vviento), el ángulo de ataque de las palas del rotor
(βpitch) y el par eléctrico resistente (Tr).
La velocidad obtenida del modelo se entrega a un multiplicador que hace las
veces de caja de engranajes multiplicadores que será la que sirva de referencia para
el actuador.
2.1.3.1.2
Control PI con anitiwindup:
Se trata de un regulador para el control en lazo cerrado de la máquina asíncrona.
El diseño se ha realizado atendiendo exclusivamente a criterios de sobrepaso y error
en régimen permanente. Para ello se incluido una acción integral para conseguir error
nulo y un sobrepaso máximo del 20% como respuesta a un escalón en la referencia.
2.1.3.2 Actuador
Físicamente, el actuador está compuesto por dos elementos fundamentales:
2.1.3.2.1
Variador V/F:
El variador universal Unidrive es un dispositivo que permite el control de motores
de inducción y servomotores en lazo abierto y cerrado.
24
2 Desarrollo de los modelos
25
El variador de que se dispone en el laboratorio es el modelo Unidrive LV 3201
cuyas características se muestran el la Tabla 5.
Tensión nominal
220 V
Intensidad máxima
34 A (52 de pico)
Potencia máxima
7.5 kW
Frecuencia de conmutación
3,4,5,6,9,12 kHz
Protección de temperatura, sobrecorriente, sobretensión en el bus de continua,
mínima tensión de entrada.
Control desde panel en variador o desde panel remoto, programación desde panel
de variador y desde PC.
Tabla 5. Características del variador V/F.
A continuación se muestra una imagen del citado variador, Figura 20.
Figura 20. Fotografía del variador V/F Unidrive LV 3201 utilizado
2.1.3.2.2
Máquina asíncrona
Se ha utilizado un motor trifásico montado en el banco cuatro del laboratorio de
máquinas eléctricas de ICAI. La placa de características de la máquina es la
siguiente, Tabla 6:
2 Desarrollo de los modelos
26
Tipo de máquina
Trifásica
Conexión
Estrella / Triángulo
Tensión
380 / 220 V
Corriente
15 / 26 A
Potencia
9 C.V.
Velocidad
1450 rpm
Tabla 6. Características de la máquina de inducción.
La máquina se ha excitado siempre en zona de flujo nominal y controlado con el
variador V/F, que a su vez se ha controlado por el regulador desarrollado para
entregar al sistema la velocidad ωr.
El motor utilizado es el que se muestra en la siguiente imagen, Figura 21.
Figura 21. Fotografía del motor de inducción utilizado
2.1.3.3 Generador
En este apartado se detalla todo lo asociado al banco excepto el actuador.
2 Desarrollo de los modelos
2.1.3.3.1
27
Motor de continua:
Se ha utilizado un motor de continua montado en el banco cuatro del laboratorio
que está acoplado mecánicamente por medio de un eje al motor de inducción
anteriormente descrito.
La placa de características incluye lo siguiente, Tabla 7:
Tipo de máquina
Continua
Conexión
Derivación
Tensión
220 V
Corriente
18 A
Potencia
4 kW
Velocidad
1500 rpm
Tabla 7. Características de la máquina de continua.
Este motor alimenta una carga que se ha implementado por medio de una
resistencia variable y regulable, es decir, permite elegir entre varios valores de
potencia consumida por la carga y genera un par resistente eléctrico.
El motor utilizado es el que se muestra en la siguiente imagen, Figura 22.
Figura 22. Fotografía del motor de continua utilizado
2 Desarrollo de los modelos
28
2.1.3.4 Otras herramientas:
2.1.3.4.1
Sensor de medida de velocidad angular:
Se ha utilizado un sensor dinanométrico acoplado al eje del banco cuatro que
entrega una tensión proporcional a la velocidad de rotación del eje. En su placa de
características se observa que genera 15 V a 1000 rpm. Esta relación será
relativamente fiable aunque se procederá a realizar una calibración.
2.1.3.4.2
Sensor de medida de par:
Se ha utilizado la medida de la intensidad entregada a la carga por el generador.
La justificación radica en que en la máquina de continua el par es proporcional a
dicha corriente. El modo de proceder ha sido integrando una resistencia en serie con
el circuito de la máquina de continua y midiendo la tensión que cae en dicha
resistencia. De esta manera, y por medio de las ganancias adecuadas se ha
conseguido una medida del par.
A continuación se muestra una imagen de la citada dinamo acoplada al eje del
banco de máquinas eléctricas y las resistencias conectadas para la medida del par,
Figura 23.
Figura 23. Fotografía de la dinamo acoplada al eje y las resistencias de cursor para
tomar la medida del par
2.1.3.4.3
Tarjeta de adquisición de datos:
La tarjeta empleada es PCI 6024E. Esta tarjeta está integrada en la placa del
ordenador permite enviar la señales capturadas al software del ordenador.
2 Desarrollo de los modelos
2.1.4
29
Implantación
En la implantación se usa, como ya se ha explicado, los modelos que simulan el
aerogenerador y el control PI junto con las propias máquinas del laboratorio.
Para la realización de este apartado se ha usado la idea expuesta en el capítulo 1.4
con los modelos concretos. El esquema que se ha implantado es el siguiente Figura
24:
w_nominal_turbina
w_nominal_turbina_rpm
0
Reductora
Constant
pitch
1
Constant3
Par_resis
Tem
Constant1 Retardo1
1/n_rpm
ref
Analog
Output
man_sat
Paso a rad/seg
sal
Par_eol
Turbina eólica +
Transmisión mecánica
(referida al eje del generador)
10
63
v elocidad (rpm)
v iento (m/s)
Comparación
Par
mando
National Instruments
PCI-6024E [auto]
Control PID
analógico
con antiwindup
Analog
Input
1500/5
1/n_rpm
1/(50*pi)
mando
wr
National Instruments
PCI-6024E [auto]
vel_viento
Analog
Input
Tensión_resistencia
National Instruments
PCI-6024E [auto]
0.366
4000/(1500*2*pi/60)
ganancia sonda A-Nm
V-A
vel
vel_rpm
vel_rad_s
900
par_Nm
tiempo
Clock
Tension_i
int_A
Figura 24. Esquema de simulación y adquisición utilizado
En el esquema se pueden observar las diferentes partes anteriormente comentadas.
Por una parte el modelo del aerogenerador en el que dependiendo las condiciones
del viento y la inclinación de los álabes se produce un par el eje y una velocidad de
referencia.
La velocidad de referencia del aerogenerador se obtiene aguas arriba del
generador por lo que es necesario transformarla para adecuarla a la velocidad
nominal del generador. Para ello se usa una ganancia que hace las veces de caja
multiplicadora.
Seguidamente se compara la velocidad de referencia y la real en un control PI
cuyo resultado es el mando a aplicar al variador.
2 Desarrollo de los modelos
Paralelamente, y al mismo tiempo, se recogen las señales necesarias por medio de
la tarjeta de adquisición de datos. Así se obtienen dos tensiones, que transformadas
debidamente mediante ganancias, dan lugar al par resistente de la carga y la
velocidad de rotación del generador.
Una vez se ha instalado y probado todo el sistema, se ha conseguido un simulador
que acciona una máquina eléctrica. Además del objetivo de este apartado que no era
sino simular un aerogenerador para accionar un generador eléctrico en situaciones
propias de su escenario industrial, ahora se puede concluir que el sistema
desarrollado tiene múltiples aplicaciones tanto en el campo de la simulación de este
tipo de instalaciones u otras de generación eléctrica como en otros campos de la
industria donde se desee someter una máquina eléctrica a unas condiciones de trabajo
determinadas.
2.1.5
Protocolo de funcionamiento
Este apartado pretende ser un breve guía para la puesta en marcha del simulador,
por un usuario que desee realizar pruebas al generador eléctrico sin tener que invertir
demasiado tiempo en la tecnología que está usando: el simulador.
Para ello se van a explicar, primero las medidas de seguridad en el laboratorio, y
segundo la puesta en marcha del sistema.
2.1.5.1 Medidas de seguridad en Laboratorio.
En el laboratorio de máquinas eléctricas del ICAI hay muchas instalaciones para
su uso en proyectos ó prácticas de la universidad que trabajan con tensiones
senoidales (220 V de tensión senoidal) y de tensiones continuas.
Se hace esta distinción desde el principio porque hay que resaltar el aumento de
peligrosidad que tienen este tipo de tensiones y corrientes para el ser humano debido
a su capacidad de realizar electrólisis en la sangre. Una vez dicho esto y como norma
general se toman siempre las siguientes precauciones:
1º. Siempre tener cuidado con lo que se hace, sin pensar que una protección puede
socorrernos en caso de accidente.
30
2 Desarrollo de los modelos
2º Utilizar guantes aislantes para realizar cualquier labor en el laboratorio.
3º Nunca manipular ninguno de los aparatos eléctricos allí presentes sin
protección y sin saber en cada momento en que estado se encuentran los circuitos
(on/off)
4º Y último, quizá el más importante: tener siempre sentido común.
Una vez dicho esto pasamos a describir el equipo utilizado en el simulador y su
posterior montaje.
2.1.5.2 Listado del equipo necesario.
El banco 4 del laboratorio de máquinas eléctricas, compuesto por:
- Una bancada de encendido y apagado.
- Un motor asíncrono de 220/380 V
- Un motor de continua de 220/380 V
Un ordenador de control que consta de:
- Un ordenador con la plataforma de control instalada.
- Un sistema de adquisición de datos en tiempo real (RTWT)
- Un variador de frecuencia V/F
Además se usan
- Una dinamo.
- Una resistencia de excitación del estator de la máquina de continua.
- Una resistencia de carga.
- Los circuitos de ganancia de los sensores.
- Polímetros y amperímetros adecuados.
31
2 Desarrollo de los modelos
2.1.5.3 Montaje.
Antes de nada indicar que antes del cableado y el montaje se debe comprobar que
el banco de trabajo está sin alimentar
2.1.5.3.1
Máquina asíncrona y variador V/F.
Una vez comprobado esto se pasa a conectar la excitación del variador de V/F
trífásico de la que consigue la tensión para generar la referencia con rectificadores e
inversores trifásicos.
El cable de trifásico tetrafilar (tres fases y tierra) se conecta desde el variador
(Posición única de las clemas) hasta los terminales RST+T de la máquina asíncrona.
Y la salida controlada del variador trifásica trifilar se conecta a los terminales UV-W de la misma máquina
El conexionado del rotor de la máquina de inducción es accesible y como ya se ha
comentado se trabajará siempre con el rotor en cortocircuito.
El conexionado final de la máquina de inducción así como el rotor se observan en
la Figura 25:
Figura 25. Conexionado de la máquina de inducción y conexionado del rotor
El variador necesita además conectarle una resistencia de carga ya que no es un
sistema de intercambio de energía reversible. Esta resistencia es una de las
refrigeradas monofásicas a 250 V del laboratorio al que se le conecta el cable
32
2 Desarrollo de los modelos
33
monofásico del V/F en sus respectivos terminales. La resistencia hay que alimentarla
y se ajusta a 4kW.
Tanto el variador como la resistencia se muestran a continuación, Figura 26.
Figura 26. Variador y resistencia de carga
2.1.5.3.2
Máquina de continua.
La máquina tiene todas las terminales accesibles tal y como se indica en Figura
27. Básicamente el montaje es para cerrar los circuitos de excitación y acoplar la
carga y el sensor de par/intensidad.
Figura 27. Conexionado de la máquina de continua
2 Desarrollo de los modelos
2.1.5.3.3
Conexionado de sensores y salidas.
Salida de mando.
El sistema tiene una salida analógica que es el mando calculado que saca el
sistema de adquisición de datos (RTWT) la conexión de esta Terminal (Channel
Out0) y la entrada de referencia al V/F está hecha internamente.
Sensor de velocidad.
La entrada al sistema de la medida de velocidad se hace de la siguiente manera. Se
conectan las bornas del sensor dinamométrico a la placa con que contienen los
potenciómetros para ajuste de ganancia y de ahí se conecta una sonda a la entrada
analógica del sistema. (Channel In0)
Sensor de par/corriente.
El sensor de par/corriente toma una muestra de la tensión de salida en una
resistencia conectada en serie con la carga de valor conocido (220 Ω, 6 A) y esta
señal se lleva a la misma placa de ajuste de ganancias que se usaba en el sensor de
velocidad de allí se lleva una sonda al RTWT (Channel In1).
Una vez se tiene todo el circuito, se debe proceder a dar alimentación a todo el
sistema. Para ello se deben seguir los siguientes pasos:
1º Subir el interruptor de tensión alterna del cuadro de alimentación
2º Pulsar el botón de Marcha en el cuadro de alimentación de continua para que la
máquina que genera tensión continua comience a girar.
3º Pulsar el botón de Conectar para tener tensión de continua en el banco del
laboratorio
4º Girar las palancas de alterna del banco hacia la derecha para tener tensión en
los motores.
34
2 Desarrollo de los modelos
35
5º Configurar las opciones del variador. Dentro del menú 0.05, debe aparecer el
valor 1 para controlar el motor desde el panel de control.
6º Configurar el panel de control. La palanca “Conexión” debe estar en la
posición ON. La palanca de giro determina el sentido de giro del motor. Por último
existe otra palanca fundamental que decide si el control se realiza desde el propio
panel (Control principal) o desde el ordenador (Remoto). Es necesario hacer
Autotune. A continuación se muestra el panel de control comentado, Figura 28.
Figura 28. Panel de control del variador
Una vez se ha terminado esta secuencia ya se puede proceder a configurar las
opciones de Simulink para empezar la simulación. Se deben seguir los siguientes
pasos para poder interaccionar con la tarjeta PCI 6024 E:
1. Capturar los bloques necesarios (Analog Input y Analog Output) dentro de
“Simulink Library Browser”. La librería donde se encuentran es “RealTime Windows Target”.
2. Configurar “Real-Time Workshop”, dentro de “Configuration Parameters”
del menú “Simulation”. En el apartado de “RTW system target” file se
debe elegir “rtwin.tlc”.
3. Iniciar la compilación en “Build Model” dentro de “Real-Time Workshop”
dentro del menú Tools.
4. Elegir la opción “External mode” dentro del menú “Simulation”.
5. Elegir la opción “Conect to target” dentro del menú “Simulation”.
6. Elegir la opción “Stara Real-Time Code” dentro del menú “Simulation”.
2 Desarrollo de los modelos
Sólo queda mostrar el esquema de montaje de todo el sistema, Figura 29.
Figura 29. Esquema de conexión para realizar el experimento
36
2 Desarrollo de los modelos
2.2
37
Acoplamiento de un encoder incremental y conexión a la tarjeta.
En este apartado se van a exponer unas ideas básicas sobre la función que cumple
un encoder y su funcionamiento, así como sus componentes principales. Además se
explicará como se ha procedido para acoplar el encoder al eje del banco de máquinas
eléctricas para capturar la velocidad.
2.2.1
¿Qué es un encoder incremental?
Se trata de un dispositivo cuya principal función capturar la posición de un eje y
posteriormente medir la velocidad a la que gira un eje.
Consta de un disco transparente con una serie de marcas opacas colocadas
radialmente y equidistantes entre sí. Gracias a un sistema de iluminación se proyecta
un haz de luz de forma adecuada, que es captado por un elemento fotorreceptor. El
eje cuya posición se quiere medir va acoplado al disco transparente. Con esta
disposición, a medida que el eje gire se irán generando pulsos en el receptor cada vez
que la luz atraviese cada marca, y llevando una cuenta de estos pulsos es posible
conocer la posición del eje.
En la Figura 30 se muestran los discos de un encoder junto con el haz de luz y las
marcas que determinan la posición del eje.
Figura 30. Discos de un encoder
2 Desarrollo de los modelos
2.2.2
Funcionamiento de un encoder
La función principal de un encoder es medir la posición de un eje. Para ello el
encoder dispone de un disco con marcas de modo que utilizando correctamente las
señales que proporciona el encoder es posible saber con mucha precisión la posición
exacta. También es posible conocer la velocidad de giro contando las marcas por
unidad de tiempo que se registran.
En la Figura 31 se observa la forma de onda que entrega un encoder
Figura 31. Disco de un encoder y forma de onda entregada
Existe, sin embargo, el problema del desconocimiento en un momento dado de si
se está realizando un giro en un sentido o en el opuesto, con el peligro que supone no
estar contando adecuadamente. Una solución a este problema consiste en disponer de
otra franja de marcas, desplazada de la anterior de manera que el tren de pulsos que
con ella se genere esté desplazado 90° eléctricos con respecto al generado por la
primera franja. De esta manera, con un circuito relativamente sencillo, es posible
obtener una señal adicional que indique cuál es el sentido de giro.
Es necesario además disponer de una marca de referencia sobre el disco que
indique que se ha dado una vuelta completa y que, por tanto, se ha de empezar la
cuenta de nuevo.
La resolución de este tipo de sensores depende directamente del número de
marcas que se pueden poner físicamente en el disco. Un método relativamente
sencillo para aumentar esta resolución es, no solamente contabilizar los flancos de
subida de los trenes de pulsos, sino contabilizar también los de bajada,
incrementando así la resolución del captador.
38
2 Desarrollo de los modelos
2.2.3
39
Elementos del acoplamiento al eje del encoder.
En este apartado se expondrán brevemente los diferentes dispositivos de la
implantación
Encoder: se trata de un encoder incremental de la marca Tekel, modelo 263. el
número de marcas que tiene el disco es de 1024. En la Figura 32 se observa la placa
de características del encoder.
Figura 32. Placa de características del encoder
Como se puede observar en Figura 32 la alimentación se produce por los cables
rojo (red) y negro (black) y es de 5 Voltios. Las señales se obtienen por los cables
verde (green) y amarillo (yellow), ambas decaladas un cierto ángulo. La referencia
de ambas señales es el cable azul (blue). Existen otras tres salidas del encoder:
marrón (brown), rosa (pink) y blanco (white), que corresponden a las señales
negadas de las anteriores y no se van a utilizar.
- Acoplamiento: se trata de un pequeño cilindro con un muelle flexible, Figura 33,
cuya misión principal es absorben posibles desalineaciones del eje del encoder y del
motor. El acoplamiento se une rígidamente a los ejes por medio de unos prisioneros.
Figura 33. Acoplamiento utilizado
2 Desarrollo de los modelos
40
- Conector a la placa. Figura 34: se trata de un pequeño dispositivo estándar
cuidando que el orden de los cables sea: rojo, negro, tierra, amarillo, verde y azul.
Este orden es inalterable ya que la placa está configurada para obtener las señales en
ese orden.
Figura 34. Conector utilizado que lleva las señales del encoder a la placa
- Casquillo, Figura 35: es una pieza de plástico para poder hacer el acoplamiento
al eje ya que los diámetros son diferentes.
Figura 35. Casquillo para unir el acoplamiento y el eje
- Tarjeta: se trata de una tarjeta diseñada en el Departamento de Electrónica y
Automática de la Escuela Técnica Superior de ICAI que debe ser programada
(FPGA). Posee unos conectores especialmente pensados para acoplar un encoder. A
continuación se muestra una imagen, Figura 36:
Figura 36. Fotografía de la tarjeta
2 Desarrollo de los modelos
2.3
41
Control vectorial
2.3.1
Solución adoptada
El control vectorial es la herramienta que permite controlar de forma óptima los
parámetros del motor, al no considerar únicamente su funcionamiento estático ante la
corriente trifásica.
Fundamentándose en un modelo preciso del motor, considera de forma
independiente la actuación sobre sus tres fases y expresa y maneja de forma
compacta el resto de variables de fase simplificando el modelo mediante la
aplicación consecutiva de dos transformaciones como se observa en la Figura 37:
Figura 37. Transformaciones de Clarke (abc→αβ o DQ) y Park (αβ o DQ→dq)
utilizadas para el diseño del control vectorial.
1) Debido a la conexión en estrella de las bobinas del estator, aparece una ligadura
que nos permite convertir el sistema trifásico en un sistema de referencia ortogonal
(Transformación de Clarke abc→αβ o DQ).
2) A continuación se aplica una rotación de ángulo igual a la posición angular de
la fase en se instante (Transformación de Park αβ o DQ→dq).
De esta forma un sistema de corrientes trifásicas equilibradas aplicado al motor
quedaría transformado en dos componentes de corriente constantes en el marco de
2 Desarrollo de los modelos
referencia giratorio dq, sistema que gira solidario al flujo del rotor. Al aplicar estas
transformaciones al modelo electromagnético del motor se obtiene que su flujo
magnético λ y par electromagnético Tem son proporcionales a las corrientes del motor
isd e isq respectivamente en el marco giratorio, por lo que controlando estas variables
se controla el par y el flujo del motor.
Para simplificar más todavía el control de la respuesta del motor, se realiza un
desacoplo de las ecuaciones dinámicas de las dos componentes iSd e iSq mediante una
realimentación activa de las variables de estado (isd, isq y ωr).
De esta forma se obtiene un sistema de ecuaciones desacopladas de primer orden,
en el cual se controla el par y el flujo del motor a partir de los voltajes de
alimentación.
La regulación de estas variables será simple al ser suficiente la utilización de
compensadores proporcional-integradores (PI) convencionales para obtener un buen
comportamiento.
Figura 38. Diagrama de bloques del lazo de control de corrientes
La Figura 38 muestra el diagrama de bloques del sistema que permite controlar el
par y el flujo (isd, isq) actuando sobre los voltajes aplicados al motor mediante un
inversor trifásico.
En el sistema planteado es necesario realimentar las corrientes de fase y la
posición del rotor y aplicar las transformaciones necesarias en cada ciclo de control.
42
2 Desarrollo de los modelos
Además del control del par y el flujo, el control de la velocidad de giro del motor
es uno de los objetivos principales.
Considerando el motor mecánicamente también se puede expresar el par
electromagnético Tem como varias contribuciones, de la carga externa y la inercia del
rotor, lográndose una relación entre ωr e iSq de primer orden.
Por tanto se puede controlar ωr actuando iSq como entrada; para ello se plantea un
sistema de control de la velocidad de giro del motor dividido en dos tareas:
1) lazo de control rápido para controlar el flujo y el par del motor con una
referencia, actuando sobre las tensiones de fase;
2) procedimiento más lento encargado de regular la velocidad el motor, actuando
sobre la referencia del lazo rápido que fija las corrientes del motor.
Figura 39. Diagrama de bloques del lazo de control de velocidad
La Figura 39 muestra el diagrama de bloques del sistema completo. Una de las
etapas esenciales en estos sistemas de control de motores es la actuación sobre la
alimentación de las fases del estator.
Los voltajes de referencia que proporciona el lazo de control deben ser aplicados
sobre el motor con la máxima exactitud. Para ello la alimentación de los voltajes de
fase del motor se realiza por medio de un inversor trifásico constituido por seis
interruptores de potencia (BJT, GTO, IGBT, etc.) los cuales se controlan con señales
PWM complementarias dos a dos, de forma que siempre haya tres interruptores a ON
y tres a OFF.
43
2 Desarrollo de los modelos
La técnica de conmutación empleada determina la exactitud con la que se aplica la
alimentación ideal calculada. La primera técnica a mencionar es la modulación por
anchura del pulso (PWM senoidal) que se ha empleado tradicionalmente y que se
implementaba usando técnicas analógicas. En los últimos años se ha desarrollado una
nueva técnica de modulación, conocida como modulación vectorial (SVM).Las
principales ventajas de esta técnica de modulación son las que se exponen a
continuación:
1) Cálculo simple e intrínsecamente digital de los tiempos de conmutación de los
interruptores del convertidor de potencia.
2) Un 15% de incremento en el voltaje máximo comparado con la modulación
PWM convencional.
3) Contenido en armónicos más bajo, en especial con índices de modulación altos,
en comparación con técnicas como la modulación senoidal.
Esta técnica de modulación vectorial está fundamentada en el hecho de que los
interruptores del inversor trifásico sólo pueden presentar ocho estados de
conmutación, y por tanto únicamente se pueden aplicar al motor ocho voltajes (seis
activos y dos nulos al no permitir el paso de corriente). Esto provoca que el espacio
vectorial en el que se representan los voltajes quede dividido en seis sectores por los
voltajes activos realizables por el inversor, como se ve en la Figura 40.
Figura 40. Sectores y posibles estados del vector tensión
La técnica SVM se basa en aplicar al motor el vector voltaje de referencia deseado
como una combinación temporal de los estados adyacentes posibles (Figura 41). El
44
2 Desarrollo de los modelos
algoritmo SVPWM es por tanto el encargado de obtener los instantes de
conmutación de las señales PWM, a partir del voltaje de referencia obtenido.
Figura 41. Cálculo del vector tensión según el sector
El problema fundamental en el diseño de estos sistemas es la necesidad de
conocer de forma precisa un gran número de parámetros eléctricos y mecánicos del
motor.
Mediante la técnica de modulación de ancho de pulso del vector espacio o
SVPWM (Space Vector Pulse Width Modulation) se aplican los diferentes vectores
espaciales durante unos tiempos determinados, que dependen del vector de referencia
que representa al sistema trifásico que se desea obtener en la salida, consiguiendo de
esa forma una señal de salida con una menor distorsión armónica.
La modulación de vectores espaciales consiste en construir el vector espacial
aplicando alternativamente los dos vectores espaciales adyacentes que definen el
sector en el que se sitúa el vector.
Para obtener las expresiones generales se detalla como se obtienen los tiempos de
aplicación de los vectores adyacentes cuando el vector que se encuentra en el sector
I, situado entre los vectores directores adyacentes V1 y V2, se descompone como
suma del vector más el vector , tal como se observa en la Figura 42.
45
2 Desarrollo de los modelos
46
Figura 42. Descomposición del vector intermedio situado en el sector I
En el transcurso de un periodo de conmutación, denominado Ts, se activarán los
interruptores correspondientes al vector durante un tiempo T1 que corresponde al
ciclo de trabajo 1 o d1, y también se activarán los interruptores correspondientes al
vector durante un tiempo denominado T2 que se corresponde con el ciclo de trabajo
2 o d2. La expresión correspondiente a la descomposición vectorial de es la
siguiente:
T T V ref = d 1 + d 2 = d1 ⋅ V1 + d 2 ⋅ V2 = 1 ⋅ V1 + 2 ⋅ V2
Ts
Ts
Una vez se han calculado los tiempos de conmutación, se mandan las señales al
inversor trifásico, que modula la forma final de la onda de alimentación al motor.
Los interruptores se controlan con los tiempos anteriormente calculados de modo que
dependiendo en dónde se encuentre el vector espacial de referencia se abrirán unos y
se cerrarán otros.
La alimentación el inversor trifásico es un bus de continua y gracias a las
aperturas y cierre de los interruptores de manera coordinada se consigue una serie de
pulsos cuyo armónico principal debe tener la amplitud y frecuencia deseadas.
Esquemáticamente, el inversor trifásico se muestra en la Figura 43:
(2)
2 Desarrollo de los modelos
Figura 43. Inversor trifásico cuyos interruptores se controlan en el PWM vectorial
2.3.2
Diseño del control vectorial
En este apartado se tratarán en detalle los progresivos pasos que se han ido dando
para alcanzar la solución final. Es imprescindible acometer los problemas divididos
en partes más pequeñas y asegurar que cada una de ellas funciona correctamente.
Por esta razón el diseño se ha realizado en varias etapas. Inicialmente se elaboró
el diseño de los lazos de corriente, seguidamente el lazo de velocidad, se integraron
los dos y por último se completó añadiendo el propio PWM vectorial.
2.3.2.1 Diseño de los lazos de corriente
En este apartado se estudiará la respuesta de las corrientes del motor ante
perturbaciones en la referencia.
Para realizar un control se necesita conocer distintos parámetros del sistema. Por
ello se presentará primeramente el modelo de una máquina de inducción en ejes dq
solidarios al flujo del rotor, Figura 44.
47
2 Desarrollo de los modelos
48
Figura 44. Circuito equivalente de una máquina de inducción en ejes dq
A partir de estos circuitos en ejes dq obtendremos las ecuaciones dinámicas del
motor de inducción, en concreto se pretenden obtener las ecuaciones dinámicas de
las corrientes iSd e iSq.
A continuación se muestran las ecuaciones de las tensiones correspondientes al
modelo anterior.
vds = Rs ids +
d
λds + ωe λqsσ
dt
(3)
d
λqs + ωe λds
dt
(4)
vqs = Rs iqs +
Donde λds , λqs y λdr se calculan de la siguiente manera:
λqs = Ls iqs + Lmiqr
(5)
λds = Ls ids + Lmidr
(6)
λdr = Lr idr + Lm ids
(7)
Asimismo Ls y Lr toman los siguientes valores:
Y σ = 1 – LM / (LR * LS).
Ls = Lσ s + Lm
(8)
Lr = Lσ r + Lm
(9)
2 Desarrollo de los modelos
49
Como ya se ha comentado anteriormente, se hace que los ejes dq giren a una
velocidad ωs igual a la del flujo de rotor, de modo que el eje d sea en todo momento
colineal con el vector de flujo. Realizando esta operación se obtiene el modelo del
motor en coordenadas de flujo de rotor.
La principal ventaja de este modelo consiste en que en este sistema de referencia
las variables de estado son continuas en régimen permanente.
Debido a que el eje d está permanentemente orientado según λdr, la componente q
del flujo del rotor y su derivada serán constantes e iguales a cero:
λqr = 0
(10)
d
λqr = 0
dt
(11)
Utilizando las ecuaciones anteriores y transformándolas adecuadamente se
obtienen las siguientes expresiones referentes a las corrientes iSd e iSq, ambas medidas
en ejes de flujo de rotor:
Rr L2m
Rr Lm
d
1
1
ids = −
⋅ λdr +
⋅ vds
Rs + 2 ⋅ ids + ω ⋅ iqs +
2
dt
Lr
σ Ls
σ Ls Lr
σ Ls
(12)
Rr L2m
Lm
d
1
1
iqs = −
⋅ ωr ⋅ λdr +
⋅ vqs
Rs + 2 ⋅ iqs − ω ⋅ ids −
dt
Lr
σ Ls
σ Ls Lr
σ Ls
(13)
Ahora se desacoplan estas ecuaciones creando dos nuevas variables uds y uds y
se definen de la siguiente manera:
uds = ω ⋅ iqs +
Rr Lm
1
⋅ λdr +
⋅v
2
σ Ls Lr
σ Ls ds
uqs = −ω ⋅ ids −
Rr Lm
1
⋅ λdr +
⋅v
σ Ls Lr
σ Ls qs
(14)
(15)
Si se reescriben entonces las ecuaciones anteriores:
d
1
ids = −
dt
σ Ls
Rr L2m
R
+
s
L2r
⋅ ids + uds
(16)
d
1
iqs = −
dt
σ Ls
Rr L2m
R
+
s
L2r
⋅ iqs + uqs
(17)
2 Desarrollo de los modelos
50
A partir de estas ecuaciones se obtienen la planta necesaria para realizar el
control de corrientes de la siguiente forma:
Rr L2m
d
1
ids = s ⋅ ids = −
R
+
⋅ ids + uds ⇒
dt
L2r
σ Ls s
⇒s+
1
σ Ls
Rr L2m
R
+
s
L2r
uds
i
1
⇒ ds =
=
uds
Rr L2m
1
ids
s+
R + 2
Lr
σ Ls s
(18)
Rr L2m
d
1
iqs = s ⋅ iqs = −
R
+
⋅ iqs + uqs ⇒
dt
L2r
σ Ls s
⇒s+
iqs
Rr L2m uqs
1
1
⇒
=
Rs + 2 =
σ Ls
Lr iqs
uqs
Rr L2m
1
s+
R
+
L2r
σ Ls s
Llamando a =
P1 ( s ) =
1
σ Ls
(19)
Rr L2m
+
= 0.4905 , se obtienen las plantas del sistema:
R
s
2
L
r
iqs
ids
y P2 ( s ) =
.
uds
uqs
P1 ( s ) =
1
s+a
P2 ( s ) = P1 ( s ) = P ( s ) =
(20)
1
s+a
Por lo tanto las dos plantas son iguales, con lo que se diseñarán el control para una
de las corrientes de modo que el control de la otra corriente será el mismo.
Una vez que ya se han calculado la planta del sistema el control será de la
siguiente manera Figura 45. El control utilizado será un control proporcional-integral
(PI) para que el error en régimen permanente sea nulo.
(21)
2 Desarrollo de los modelos
1
51
ids*
ids
1
s*Ti
uds
Tm
Ki
P(s)
1
Figura 45. Lazo de corrientes del sistema estudiado
Se ha realimentado la parte proporcional directamente desde la salida ya que de
este modo se evita la aparición de un cero en el numerador, que únicamente aumenta
el sobrepaso del sistema.
Se trata de un sistema de segundo orden por lo que habrá que fijar dos valores Ti
y Ki dependiendo de las especificaciones que se consideren. La función de
transferencia genérica será de la siguiente manera:
F ( s) =
s
2
ωn2
+
1
2ζ
ωn
(22)
+1
Se calculan ahora la función de transferencia de nuestro sistema:
Ki ⋅ P ( s )
1
1
⋅
Ki ⋅
1 + Ki ⋅ P ( s ) sTi
Ki ⋅ P ( s )
s+a
F ( s) =
=
=
=
Ki ⋅ P ( s )
1
1
1
+
Ki
⋅
P
s
sTi
+
Ki
⋅
P
s
1
(
)
(
)
(
)
1+
⋅
1 + Ki ⋅
⋅ sTi + Ki ⋅
s+a
s+a
1 + Ki ⋅ P ( s ) sTi
=
Ki
Ki
= 2
=
( s + a + Ki ) ⋅ sTi + Ki s ⋅ Ti + ( a + Ki ) Ti ⋅ s + Ki
1
s2 ⋅
Ti
a
+ s ⋅ Ti + 1 + 1
Ki
Ki
(23)
Identificando los términos, se obtienen las siguientes ecuaciones:
1
ω
2
ni
=
Ti
Ki
(24)
2 Desarrollo de los modelos
52
2ζ i
a
= Ti + 1
ωni
Ki
(25)
Para obtener los valores de las constantes Ki y Ti, se fijan distintos valores.
Primero se fija el valor de ζ a 0.7 para que el sobrepaso sea de un 4.6%
ζ i = 0.7
(26)
Además se opta por ta a 0.5 ms lo cual quiere decir que el tiempo transcurrido
hasta que la salida alcance la referencia por primera vez será de 0.5 ms.
tai = 0.0005
(27)
Se necesita este tiempo de alcance en magnitudes unitarias por lo que es
necesario dividir este dato por el tiempo base:
tai = 0.0005 pu / T _ base = 0.0005 / 0.0032 = 0.1571
(28)
Buscando en el libro de regulación automática (ref: F. Luis Pagola), se
encuentra fácilmente la siguiente relación para ζ = 0.7:
ωni ⋅ tai = 3.29
(29)
ωni = 20.9448
(30)
Por lo tanto:
Resolviendo las ecuaciones anteriores (24), (25), se obtienen los siguientes
valores:
1
ω
2
ni
=
Ti
⇒ Ki = Ti ⋅ 20.94482 ⇒ Ki = 28.8322
Ki
2ζ i
a
0.4905
= Ti + 1 ⇒ 0.0668 = Ti
+ 1 ⇒ Ti = 0.0657
2
ωni
Ki
Ti ⋅ 20.9448
Los resultados de este sistema se detallarán en el apartado de resultados más
adelante.
2.3.2.2 Diseño del lazo de velocidad
En este apartado se estudiará la respuesta dinámica del motor ante posibles
cambios en la referencia.
(31)
(32)
2 Desarrollo de los modelos
53
Antes de empezar a diseñar el lazo de velocidad, es necesario recordar que los
transitorios mecánicos del motor siempre son mucho más largos que los transitorios
electromagnéticos, de modo que el tiempo de alcance en este caso será superior.
En este apartado la planta a utilizar debe relacionar el par aplicado a la máquina y
la velocidad que alcance el rotor. Para ello utilizaremos la ecuación de la dinámica de
rotación:
Tmotor − Tresistente = J ⋅ α + B ⋅ ω
(33)
Donde J representa el momento de inercia de la masa en rotación, B es el
rozamiento viscoso del sistema y α es la aceleración angular del eje.
Así, se obtienen la planta de nuestro sistema giratorio:
Tres = J ⋅ α + B ⋅ ω = J ⋅
d
ω + B ⋅ω = J ⋅ s ⋅ω + B ⋅ω = ( J ⋅ s + B ) ⋅ω
dt
(34)
La planta relaciona la velocidad de rotación en función del par resultante:
Tres = ( J ⋅ s + B ) ⋅ ω ⇒
ω
T
=
1
( J ⋅ s + B)
(35)
Por lo que la planta P3(s) será:
P3 ( s ) =
1
( J ⋅ s + B)
Como en el apartado anterior referido a los lazos de corrientes, ahora se
pretende diseñar un nuevo control PI con el objetivo de que el error en régimen
permanente entre la referencia y la salida sea nulo. Así el modelo será como el
representado en la Figura 46:
(36)
2 Desarrollo de los modelos
1
54
wref*
w
1
s*Tm
Tm
Tm
Km
P3(s)
1
Figura 46. Lazo de velocidad del sistema estudiado
En este caso se ha procedido igualmente a realimentar la parte proporcional
directamente desde la salida para evitar la aparición de un cero en el numerador
Antes de comenzar a calcular las constantes Km y Tm es necesario conocer el
valor del momento de inercia J y del rozamiento viscoso B. estos valores deben ser
los reales del motor de inducción para proceder en un futuro a la implantación de este
control vectorial en el propio motor y poder así hacer pruebas.
Para calcular los valores J y B se han realizado dos pruebas en el laboratorio de
máquinas eléctricas de ICAI. La primera de ellas consistía en medir la velocidad de
deslizamiento cuando el motor gira a velocidad nominal, mientras que la segunda
consistía en medir la constante de tiempo, es decir, el tiempo que tarda el motor en
alcanzar una velocidad de un 37% habiendo cortado la alimentación al encontrarse el
motor girando a régimen nominal.
2.3.2.2.1
Medida de la velocidad de deslizamiento:
Para medir la velocidad de deslizamiento se utilizó una lámpara estroboscópica.
Su funcionamiento consiste en que esta lámpara emite flashes de luz cada 20
milisegundos, es decir, emite flashes a 50 Hz.
En el eje del motor se ha pintado una raya de color claro y se ha iluminado el eje
con la lámpara estroboscópica. Si la velocidad del eje fuera de 50 Hz, es decir 3000
rpm, no se verían moverse a la marca puesto cuando la lámpara emite un flash la
2 Desarrollo de los modelos
55
marca siempre está en el mismo sitio, es decir, cada vez que emite un flash, el eje ha
dado una vuelta.
Sin embargo, ya que el motor de inducción no gira a velocidad nominal sino que
existe una velocidad de deslizamiento, al incidir la luz de la lámpara sobe el eje, se
verá girar es marca a una velocidad proporcional a la velocidad de deslizamiento.
También hay que tener en cuenta que la velocidad de sincronismo del motor no es
3000 rpm sino 1500 rpm porque tiene dos pares de polos. Por lo que la marca del eje
girará el doble de rápido, lo cual se ha de tener en cuenta para realizar los cálculos.
El experimento se realizó tres veces para evitar posibles errores y sacar así una
media más fiable. El resultado de las pruebas fue el siguiente:
1ª prueba: 96 vueltas en 2 min. 27 seg.
2ª prueba: 200 vueltas en 6 min. 00 seg.
3ª prueba: 100 vueltas en 3 min. 17 seg.
Pueden resultar contradictorios los resultados obtenidos en la 1ª y 3ª prueba
ya que para prácticamente las mismas vueltas, el tiempo es prácticamente un 50%
superior. Esto se debe a que el bobinado del rotor se ha ido calentando según se
hicieron los experimentos con lo que la resistencia retórico creció, lo cual se tradujo
en un mayor deslizamiento.
Se calcula ahora el deslizamiento en cada prueba teniendo en cuenta que el
número de vueltas reales será la mitad debido a los pares de polos del motor.
1ª prueba: 96 / 2 = 48 vueltas
2 min. 27 seg. = 147 seg.
48vueltas
= 0.326rps
147 segundos
(37)
Si pasamos esta magnitud a valores unitarios, lo que equivale a dividir por la
velocidad mecánica base (1500 rpm = 25rps).
ω s1 =
0.326rps
= 0.01304 pu
25rps
Realizando las mismas operaciones para las otras dos pruebas obtenemos los
siguientes resultados:
(38)
2 Desarrollo de los modelos
56
2ª prueba : ωs 2 = 0.0111 pu
(39)
3ª prueba : ωs 3 = 0.0101 pu
(40)
Se desea obtener un valor muy aproximado al funcionamiento en régimen
permanente del motor, por lo que se ha optado por no considerar la primera prueba y
sí las dos últimas en donde el motor estuvo funcionando una vez había finalizado el
transitorio térmico de los arrollamientos.
Para obtener un valor medio de las dos últimas pruebas, se procede a calcular
su media aritmética:
ωs _ media =
2.3.2.2.2
0.0111 + 0.0101
= 0.0106 pu
2
Medida de la constante de tiempo τ de la masa rotativa del motor de
inducción:
Para llevar a cabo esta prueba se alimenta el motor hasta que gire a velocidad
nominal, seguidamente se desconecta la alimentación y se deja en vacío de modo que
el rotor se va frenando hasta que se detiene completamente.
Para conocer la constante de tiempo del sistema se cronometra el tiempo que
tarda el motor en reducir su velocidad hasta que adquiere una velocidad del 37% de
la nominal. En un sistema general, la curva obtenida sería la siguiente Figura 47:
(41)
2 Desarrollo de los modelos
57
1
0.9
0.8
velocidad (pu)
0.7
0.6
0.5
X: 99
Y: 0.3716
0.4
0.3
0.2
0.1
0
0
50
100
150
200
250
300
tiempo (s)
350
400
450
500
Figura 47. Evolución de un sistema general
Realizando el experimento en nuestro sistema y recogiendo la señal por
medio de una dinamo tacométrica y una tarjeta de adquisición de datos se obtuvo la
siguiente curva, Figura 48.
2500
2000
velocidad (rpm)
1500
1000
500
0
-500
0
10
20
30
40
tiempo (s)
50
60
70
80
Figura 48. Evolución de la velocidad del motor de inducción
En esta figura se puede observar que inicialmente se arrancó el motor desde
velocidad nula, y una vez adquirió a velocidad nominal (unas 1485 rpm), se
desconectó la alimentación para dejar girar el motor libremente hasta su parada final.
2 Desarrollo de los modelos
58
Debido las vibraciones del sistema, aparece mucho ruido en la figura por lo
que se optó por filtrar la señal con un filtro paso bajo con una frecuencia de corte de
5Hz y el resultado se muestra en la Figura 49:
1800
1600
1400
velocidad (rpm)
1200
1000
800
X: 53.54
Y: 550
600
26 segundos
400
200
0
-200
0
10
20
30
40
tiempo (s)
50
60
70
80
Figura 49. Evolución de la velocidad filtrada del motor de inducción
Si calculamos el 37% de la velocidad nominal el resultado es aproximadamente
549 rpm y el tiempo que transcurre hasta que alcanza este valor es de
aproximadamente 26 segundos. Así, la constante de tiempo τ del sistema es de 26
segundos.
Una vez que ya se tiene los valores de la velocidad de deslizamiento ωs = 0.0106
pu y la constante de tiempo τ = 26 segundos, se puede proceder a calcular el valor de
J y B. para ello utilizaremos varias ecuaciones:
T0 =
1
s0
r2
(42)
Esta ecuación relaciona el par T0 y el deslizamiento s0, siendo r2 la resistencia del
rotor.
T = B ⋅ω
(43)
Relación existente entre el par la velocidad de rotación en régimen permanente.
J
=τ
B
El valor de la constante de tiempo τ tiene el valor indicado en el sistema.
Sustituyendo los valores calculados adecuadamente obtenemos J y B:
(44)
2 Desarrollo de los modelos
59
T0 =
1
1
⋅ s0 =
⋅ 0.0106 = 0.168 pu
r2
0.063
(45)
0.168
⇒ B = 0.169 pu
0.9894
(46)
J
= τ ⇒ J = τ ⋅ B = 26 ⋅ 0.169 ⇒ J = 4.39 seg
B
(47)
T = B ⋅ω ⇒ B =
T
ω
=
Seguidamente se calcula el valor de J en pu:
J=
4.39
4.39
=
= 1372 pu
T _ base 0.0032
(48)
Una vez ya se ha calculado J y B se está en condiciones de diseñar el control de
velocidades, es decir, ya se puede calcular el valor de Km y de Tm.
El modelo utilizado para diseñar el control del lazo de velocidad es el mismo que
el utilizado en el lazo de corrientes por lo que la función de transferencia será la
misma exceptuando las constantes. Para calcularlas seguiremos un proceso parecido
al efectuado anteriormente.
F ( s) =
s
2
ωn2
+
1
2ζ
ωn
(49)
+1
Se calcula ahora la función de transferencia del sistema:
Km ⋅ P3 ( s )
1
⋅
1 + Kmi ⋅ P3 ( s ) sTm
Km ⋅ P3 ( s )
F ( s) =
=
=
Km ⋅ P3 ( s )
1 + Km ⋅ P3 ( s ) ) sTm + KmP3 ( s )
1
(
1+
⋅
1 + Km ⋅ P3 ( s ) sTm
Km
1
B
J
Km
s +1
B
B
=
=
=
1
1
J
Km
Km
s +1+
⋅ sTm +
B
B
B
B
B
1 + Km J
sTm + Km J
s +1
s +1
B
B
Km
1
B
=
=
J
Km
J
Km
B
s 2 ⋅ ⋅ Tm + s ⋅ 1 +
s2 ⋅
⋅ Tm + s ⋅ Tm
+ 1 + 1
Tm +
B
B
B
Km
Km
Primero se fija ζ a 0.7 para que el sobrepaso sea de un 4.6%
(50)
2 Desarrollo de los modelos
60
ζ m = 0.7
(51)
Para definir el tiempo de alcance, se decide que un valor adecuado es que el
sistema alcance la referencia 10 veces más rápido que la constante de tiempo por lo
tanto:
tam
1372
J
= B = 0.169 = 811.83 pu
10
10
(52)
Multiplicando por el tiempo base para obtener el tiempo de alcance en
segundos se tiene:
tam = 811.83 pu ⋅ T _ base = 811.83 ⋅ 0.0032 = 2.598seg
(53)
Buscando en el libro de regulación automática (ref: F. Luis Pagola), se encuentra
fácilmente la siguiente relación para ζ = 0.7:
ωnm ⋅ tam = 3.29
(54)
ωnm = 0.0071364
(55)
Por lo tanto:
Resolviendo las ecuaciones, se obtienen los siguientes valores:
1
ω
2ζ m
ωnm
2
nm
=
J
⋅ Tm ⇒ Km = J ⋅ Tm ⋅ 0.0071364 2 ⇒ Km = 7.6151
Km
0.169
B
= Tm
+ 1 ⇒ 196.177 = Tm
+ 1 ⇒ Tm = 339.72
2
Km
J ⋅ Tm ⋅ 0.0071364
(57)
Los resultados de este sistema se detallarán en el apartado de resultados más
adelante.
2.3.3
Diseño de los lazos de corriente integrados en el lazo de velocidad
Una vez se han diseñado los controles de los lazos de corriente y velocidad ha
llegado el momento de generar un modelo más grande en el que se incluyan los tres
modelos anteriores, los dos de corriente y el de velocidad.
Para ello es necesario conocer distintas relaciones entre las variables para generar
el modelo. Por esta razón se explicarán a continuación cómo se calculan las
magnitudes.
(56)
2 Desarrollo de los modelos
61
Para construir el modelo, se necesita conocer la relación entre la velocidad del
rotor y el flujo del rotor. Se ha elaborado por tanto una curva que calcula el flujo en
función de la velocidad.
Esta curva se construye de manera que para cualquier velocidad comprendida
entre la nominal en un sentido de giro y la velocidad en el sentido de giro contrario,
el flujo es el nominal. Sin embrago por encima de la velocidad nominal en cualquiera
de los dos sentidos de giro, el flujo se debilita siguiendo una curva hiperbólica como
se ve a continuación:
λr =
1
(58)
ω
Para ilustrar más explícitamente lo que se ha explicado, se representa a
continuación la gráfica que relaciona flujo y velocidad, Figura 50:
1.05
1
0.95
flujo
0.9
0.85
0.8
0.75
0.7
0.65
-2
-1.5
-1
-0.5
0
velocidad
0.5
1
1.5
2
Figura 50. Curva que muestra la relación entre el flujo del rotor y la velocidad
mecánica de rotación
Por otra parte se ha optado por una estrategia de flujo constante. Esto significa
que la relación entre la corriente isd y el flujo del rotor λr es una constante que es Lm y
se muestra en la siguiente ecuación:
ids =
λr
Lm
Existe a su vez una relación entre la velocidad a la que gira el rotor y la intensidad
isq que se muestra a continuación:
(59)
2 Desarrollo de los modelos
62
iqs =
Lr
⋅ω
λr ⋅ Lm r
(60)
Por último, es necesario conocer la ecuación que relaciona el par aplicado al eje y
las corrientes en ejes dq. Una de las ventajas del empleo de estos ejes es que el par se
controla de manera muy sencilla.
Se suele decir que el flujo lo controla la corriente en eje d, mientras que el par lo
controla la corriente en eje q. Esto es así ya que teniendo en cuenta la siguiente
ecuación:
T = λr ⋅ iqs
(61)
Ahora que se ha fijado la corriente isd el flujo queda fijado automáticamente ya
que elegimos la estrategia de flujo constante. Por otro lado, la corriente isq fija el par
aplicado por la ecuación que se ha mostrado anteriormente.
Una vez se conocen todas las relaciones necesarias, se está en disposición de
generar el modelo en donde se integran los lazos de corriente dentro del lazo de
velocidad. En la siguiente figura se muestra un esquema simplificado, Figura 51:
wref
1
wr
control velocidad
Lr/Lm
iqs
Lazo corriente
iqs
w
Lm/Ksigmar
flujo
Planta
w
1
ids
ids
1/Lm
T
Cálculo del par
Lazo corriente
V vs w
Figura 51. Lazo de velocidad simplificado en el que están integrados los lazos de
velocidad
Una vez que ya tenemos una idea general de qué es lo que se pretende conseguir
en este apartado se mostrará a continuación el esquema final en el que se observan
los lazos de corrientes y velocidad en detalle, Figura 52:
2 Desarrollo de los modelos
wref
1
1
T_base*Tm.s
63
wr
Km
iqs
Lr/Lm
w
1
T_base*Ti.s
uqs
Ki
1/a
T_base/a.s+1
iqs
Par motor
Lm/Ksigmar
flujo
ids
1/Lm
1
T_base*Ti.s
uds
Ki
1/a
T_base/a.s+1
1/B
w
1
T_base*J/B.s+1
Par_resis
ids
V vs w
Figura 52. Modelo de simulación completo en el que los lazos de corrientes están
integrados en el lazo de velocidad
Es necesario reseñar que en este esquema se muestran las distintas variables antes
comentadas y en especial las magnitudes uds y uqs que han sido utilizadas
anteriormente para el desacoplo de las ecuaciones de las corrientes. Estas variables
también se utilizarán en aparatados posteriores.
Los resultados obtenidos en este apartado se mostrarán más adelante en la sección
de resultados.
2.3.4
Diseño del PWM vectorial, inversor trifásico y motor de inducción.
Antes de mostrar el esquema que se ha utilizado para simular este apartado, se va
a describir cada uno de los bloques que componen el esquema.
Como ya se dijo anteriormente, la modulación de ancho de pulso vectorial es una
técnica con muchas ventajas en comparación con la modulación senoidal.
El funcionamiento de la modulación de ancho de pulso vectorial ya se explicó
con anterioridad, así que en su simulación se usará un bloque en Simulink que realiza
las operaciones necesarias.
El bloque utilizado desarrollado por uno de los directores del proyecto calcula
los tiempos de conmutación de las tres ramas de un inversor trifásico en un subciclo,
utilizando la técnica del PWM vectorial. El bloque en cuestión se muestra a
continuación, Figura 53:
2 Desarrollo de los modelos
64
usD
usQ
PWM
Vectorial
(Lim. Hex.)
ts i
Vc
PWM_Vectorial_lh
Figura 53. Bloque usado en Simulink para la modulación de ancho de pulso
vectorial
Como se puede observar, las variables de entrada de este bloque son usD, usQ y
Vc.
Las dos primeras son las tensiones en ejes DQ del estator. Estos ejes DQ son
diferentes a los previamente utilizados dq que giran solidarios al flujo del rotor. Estos
nuevos ejes son solidarios al estator, es decir, son fijos y el eje D coincide con el la
fase R de los arrollamientos.
La tercera variable de entrada es Vc, la tensión DC del condensador.
Dependiendo del valor que tome esta variable, la amplitud de los pulsos calculados
variará.
Por otro lado, la salida del bloque es ts i, que es un vector con los tiempos de
conmutación de las ramas del inversor y la secuencia de conmutación.
A continuación se utiliza otro bloque desarrollado por uno de los directores
de proyecto que simula el funcionamiento de los temporizadores que controlan las
ramas del inversor. Así, el bloque recibe el vector con los tiempos de conmutación
del PWM vectorial calcula las señales de disparo de cada rama del inversor, s1, s2,
s3. Este bloque recibe el nombre de Generador de pulsos y se muestra a
continuación, Figura 54:
2 Desarrollo de los modelos
65
s1
t's+sec
Gen.
Pulsos
s2
s3
Gen_conmutación
Figura 54. Bloque usado en Simulink para calcular las señales de disparo del
inversor
Ahora se necesita otro bloque que simule el funcionamiento de un inversor
trifásico. Éste es el encargado de generar las tensiones de alimentación al motor de
inducción. Las tensiones serán básicamente pulsos de una amplitud determinada
(tensión de condensador) y una anchura que varía según las órdenes que reciba de la
modulación de pulsos. Los interruptores que tiene el inversor se abren o cierran
dependiendo de las señales que reciba del exterior.
La salida de este bloque será una serie de pulsos de tensión cuyo primer
armónico corresponderá con la onda de tensión deseada. El bloque se muestra a
continuación, Figura 55:
s1
Inversor
Trifásico
(ideal)
s2
s3
vcond
Un
Vn
Wn
inversor_Uf
Figura 55. Bloque usado en Simulink que simula un inversor trifásico ideal
Se reconoce fácilmente cómo las entradas son las señales de disparo de cada rama
del inversor junto con la tensión del condensador que fija la amplitud de los pulsos.
Por otro lado, las salidas del bloque corresponden a las tensiones de fase equivalente.
Las tensiones que se acaban de obtener del inversor son tensiones de fase, sin
embargo los arrollamientos del motor empleado están conectados en estrella por lo
que se necesitan las tensiones de línea. Su obtención es sencilla, para conseguir por
ejemplo Urs basta con hacer la diferencia entre Ur y Us..
2 Desarrollo de los modelos
66
El modelo del motor utilizado está doblemente alimentado, por el estator y rotor,
sin embargo, en la realidad se utiliza el motor con el rotor cortocircuitado, por lo que
se diseñará con esta precaución. El bloque del motor desarrollado por uno de los
directores del proyecto, simula la realidad y calcula las intensidades de rotor y
estator, así como el par motor generado. A éste se le opone una carga que se puede
fijar con el valor deseado de modo que el resultado final de esta serie de operaciones
es la velocidad el eje simulado. Este último apartado se muestra en la siguiente
Figura 56:
1
2
1
2
3
4
5
6
VSrs
iSr
iSs
VSst
iSt
VStr
Motor
iRr
VRrs Inducción
iRs
(mod. din.)
VRst
iRt
VRtr
Tem
th_mec
n_rpm
3
0
par_mot
Carga
7
Par_resis
Motor_asíncrono_(a)
w
par_res
Carga Motora
Figura 56. Bloques usados en Simulink que simulan el funcionamiento de un
motor de inducción en cuyo eje se ha acoplado una carga resistente
Se necesita también para el correcto funcionamiento del esquema un bloque que
calcule el seno y coseno de un ángulo. El bloque utilizado desarrollado por uno de
los directores del proyecto, además de cumplir este requisito por medio de una
aproximación polinómica, proporciona el seno y coseno para la corrección en PWM
vectorial por medio de un factor de corrección. Esta cualidad no se va a utilizar ya
que no es necesaria cuando el tiempo de simulación es continuo.
El bloque es el siguiente Figura 57:
1
teta
2
w
sen
SIN
cos
COS
sen_X*d
d/2
cos_X*d
1
2
3
4
Sen, Cos, Comp_teta
Figura 57. Bloque utilizado para calcular el seno y coseno de ángulos
2 Desarrollo de los modelos
67
Por último, sólo se necesitan dos bloques más cuya misión es la de realizar las
transformaciones de Park y Clarke. Recordando lo explicado anteriormente, la
transformación de Park convierte los datos expresados en ejes DQ fijos solidarios a
la fase R del motor en datos expresados en ejes dq móviles siendo el eje d solidario al
flujo del rotor. Por su parte la transformación de Clarke hace lo propio convirtiendo
de ejes trifásicos abc a ejes DQ de estator.
Los bloques utilizados, desarrollados por uno de los directores del proyecto,
transforman de ejes dq móviles de rotor a ejes DQ fijos de estator el primero y de
ejes trifásicos abc a ejes móviles dq de rotor. Ambos bloques necesitan para realizar
los cálculos el seno y el coseno del ángulo formado por el flujo de rotor y la fase R
del motor que coincide con el eje D fijo de estator.
Los bloques mencionados se muestran a continuación Figura 58:
1
a
2
3
b
4
cos
sen
d
a,b -> d,q
(a+b+c = 0)
q
1
2
5
d
6
7
q
8
cos
sen
d'
3
q'
4
d,q -> d`,q`
d,q -> D,Q
a,b -> d,q
Figura 58. Bloques utilizados en Simulink para realizar las transformaciones de
Park y Clarke
Una vez se han comentado todos los elementos necesarios para realizar el
esquema que simula el funcionamiento de un PWM vectorial, ha llegado el momento
de integrarlos y ver cuál es el resultado final, que se muestra a continuación:
2 Desarrollo de los modelos
Uds
d
Uqs
q
sen
68
d'
usD
q'
usQ Vectorial
d,q -> d`,q`
cos
PWM
ts i
t's+sec
(Lim. Hex.)
d,q -> d',q'
Vc
Vcond
Gen.
Pulsos
s1
s1
s2
s2 Inversor
s3
s3
Gen_conmutación
Vc
Un
Trifásico Vn
(ideal)
vcond
Wn
inversor_Uf
PWM_Vectorial_lh
sqrt(2)*U_base
Vcond
0
rotor
n_rpm
VSrs
VSst
VStr
a
b
Terminator4
cos
iRr
Terminator2
iRs
teta
ángulo
w
w
Gain
SIN
cos
COS
d/2 sen_X*d
ids
q
iqs
a,b -> d,q1
Terminator3
iRt
Terminator5
VRtr
n_rpm
Tem
par_mot
Carga
th_mec
Terminator1
sen
d
a,b -> d,q
sen (a+b+c = 0)
iSt
Motor
VRrs Inducción
(mod. din.)
VRst
iSr
iSs
par_res
Motor_asíncrono_(a)
Carga Motora
Par_resis
Terminator6
cos_X*d
Terminator7
Sen, Cos, Comp_teta
Figura 59. Esquema utilizado en la simulación que representa el control vectorial,
un motor de inducción y una carga
2.3.5
Cálculo de la velocidad de deslizamiento y el correspondiente ángulo girado.
El control vectorial requiere conocer el ángulo que forman el flujo del rotor y la
fase R de la alimentación en todo momento para realizar las transformaciones de
Park y Clarke.
Por ello en este apartado se expondrá cómo se ha procedido para calcular la
velocidad de deslizamiento del motor de inducción para posteriormente calcular el
ángulo girado por el eje.
Se ha utilizado un algoritmo sencillo para el cálculo de la velocidad de
deslizamiento, típicamente usado en control vectorial indirecto. Utilizando las
variables flujo del rotor y corriente de estator en eje q y una ganancia se calcula ωdes
como se muestra a continuación:
ref
ωdes
=
*
Rr ⋅ Lm isq
⋅ *
Lr
λR
A partir de aquí, se calcula el ángulo correspondiente a la velocidad de
deslizamiento con una simple integración.
El ángulo que se quiere calcular es la suma del ángulo girado por el eje y aquel
ángulo que corresponde a la velocidad de deslizamiento del motor. Por lo tanto el
ángulo del flujo del rotor se puede calcular como se muestra en la Figura 60:
(62)
w
2 Desarrollo de los modelos
69
w_desliz
2
isq*
1
Rr*Lm/Lr
w_red
1
theta_des
1
s
theta_ref
flujo_r*
theta_mec
3
P
theta_mec
Figura 60. Algoritmo para calcular el ángulo entre el flujo de rotor y la fase R
Hay que recordar que este ángulo calculado es eléctrico por lo que es
necesario convertir las magnitudes mecánicas a eléctricas multiplicando por el
número de polos, en este caso 2.
En una futura implantación en el banco de máquinas eléctricas, el ángulo
mecánico se importará por medio del encoder y la tarjeta de adquisición de datos.
2.3.6
Control de la velocidad de un motor de inducción con un PWM vectorial.
En todos los apartados anteriores se han explicado los pasos seguidos para
desarrollar un control de velocidad con un PWM vectorial, los conceptos, los
controles y el método seguido para calcular todos los parámetros necesarios.
Una vez se ha comprobado que los esquemas anteriores funcionan correctamente
de acuerdo con los diseños, se ha procedido a integrarlos todos en un esquema de
simulación mayor.
Con esto se pretende conseguir un sistema en el que proporcionando una
velocidad de referencia del eje del motor, se calculan automáticamente las tensiones
con las que se debe alimentar el propio motor.
Físicamente, en este apartado se pretende simular el funcionamiento del actuador
explicado en el apartado 1.4, siendo el par y la velocidad entregados los que recibirá
el generador eléctrico, en este caso un motor de continua.
Para evitar una posible confusión por el gran número de conexiones que aparecen
en el esquema se ha procedido a concentrar todos los grupos funcionales del control
y PWM vectorial en un subsistema, cuyo funcionamiento interno será el mismo al
2 Desarrollo de los modelos
70
detallado anteriormente Figura 61. En el Anexo A se detalla el esquema más
detenidamente.
VSrs
VSrs
iSr
[isdr]
Control MI VSst
VSst
iSs
[isqr]
w_ref
escalón de velocidad
wr
[wr]
wr_real
VStr
iSt
VStr
Motor
VRrs Inducción
iRr Terminator2
(mod. din.) iRs
0
VRst
VRtr
rotor
n_rpm
Gain1
Terminator3
iRt Terminator
n_rpm
Tem
Terminator1
th_mec
[th_mec]
Goto2
Motor_asíncrono_(a)
0.1
wr
par_mot
Carga
w
par_res
[wr]
Goto1
Carga Motora
M_base
rotor1
Gain11
Figura 61. Esquema simplificado del control de velocidad
2.3.7
Simulación completa de un aerogenerador
En este apartado se mostrará el esquema final de simulación que constituye el
elemento principal del presente proyecto. Para ello se integrarán todos los esquemas
desarrollados hasta ahora junto con otros grupos que simularán el funcionamiento del
rotor de un aerogenerador y un generador.
Se han utilizado bloques desarrollados previamente como la turbina del
aerogenerador y una máquina de continua. Del primero de ellos se conocen
parámetros el diámetro de la turbina, potencia mecánica nominal, velocidades
máximas y mínimas, inercia, etc. estás magnitudes se detallarán en el Anexo B. De la
máquina de continua, que funcionará a modo de generador se conocen también todos
sus parámetros, desde la tensión, intensidad y velocidad nominales hasta los
parámetros internos como la resistencia e inductancia.
El modo de interrelacionar cada uno de los bloques en el esquema se muestra en
la Figura 62.
2 Desarrollo de los modelos
71
par
par
Molino Aerogenerador
Generador electricidad
velocidad
electricidad Carga
velocidad
aerogenerador
Generador
Red o carga aislada
Figura 62. Esquema simplificado del aerogenerador
Como ya se ha comentado en el capítulo 2.3.4, el bloque llamado molino
aerogenerador representa en la realidad las palas del molino junto con todo el sistema
de reguladores y cajas multiplicadoras. El bloque llamado generador es un modelo
que simula el funcionamiento de un generador eléctrico real y la carga, puede
representar la red o una carga aislada.
El molino aerogenerador abarca en la simulación tanto el modelo de un
aerogenerador como el motor de inducción controlado vectorialmente que funciona
como actuador. Un modelo de un motor de continua simula un generador y por
ultimo, un bloque que simula una masa rodante con inercia y rozamiento viscoso
hace las veces de una carga pasiva.
0
Constant
5
Constant3
Sine Wave1Retardo1
pitch
velocidad (rpm)
viento (m/s)
Tem
VSrs
VSrs
iSr
[isdr]
Control MI VSst
VSst
iSs
[isqr]
w_ref
Par_resis
wr
wr_real
VStr
Par_eol
iSt
VStr
Motor
(mod. din.) iRs
0
VRst
iRt
VRtr
Tem
rotor
n_rpm
Gain1
Ucc_exc
Ucc_exc
Ucc Motor DC
w
iRr
VRrs Inducción
Turbina eólica +
Transmisión mecánica
(referida al eje del generador)
Iexc
Icc
Ecc
Par
th_mec
n_rpm
Motor_asíncrono_(a)
[th_mec]
Goto2
Iexc
-1
Ecc
Motor de Continua
par_mot
Carga
w
par_res
R_carga
Icc
Carga Motora
Figura 63. Esquema completo de simulación
[wr]
Goto1
2 Desarrollo de los modelos
2.4
2.4.1
72
Algoritmo de estimación de la velocidad
Concepto y descripción
En este capítulo se va a exponer el procedimiento seguido para obtener un
algoritmo de estimación de velocidad. Para ello, lo primero es conocer el esquema
simplificado equivalente de un motor de inducción para comprender el desarrollo,
Figura 64.
Figura 64. Circuito equivalente de una máquina de inducción en ejes dq
El vector tensión y las ecuaciones del flujo en un motor de inducción de jaula de
ardilla son las siguientes (Leonhard, 1990):
d λs
dt
(63)
d λR
− jωR λR
dt
(64)
vs = Rs is +
0 = RR iR +
λs = Ls is + LM iR
(65)
λR = LM is + LR iR
(66)
Si se reescriben estas ecuaciones para relacionar la velocidad del rotor con los
vectores tensión y corriente de estator, se obtiene:
2 Desarrollo de los modelos
73
LM d λR RR LM
L
+
λR + (1 − σ ) Ls is = jωR M λR
LR dt
LR LR
LR
(67)
Donde σ = 1 – LM / (LR * LS).
Además, la derivada del flujo del rotor se puede obtener como una función de
la tensión de estator y corriente de estator utilizando (63), (65) y (66):
d λR LR
=
dt
LM
dis
vs − Rs is − σ Ls dt
(68)
Usando (las dos anteriores) se puede concluir:
v1 +
RR
v2 dt = ωR j ∫ v1dt ⇒ y = ωR u
LR ∫
(69)
di
LM d λR
= vs − Rs is − σ Ls s
LR dt
dt
(70)
Donde:
v1 =
v2 = vs − Rs is − Ls
dis
dt
(71)
El cálculo de la velocidad del rotor se calcula gracias a la ecuación (69), y
como se ve en (70) y (71) la obtención de “y” y “u” no es función de ωR. Por ello se
puede utilizar el cociente de estos números complejos para calcular ωR. Sin embargo
el signo de ωR no está incluido así que el modo de solucionarlo es que el módulo de
“u” tome el signo de la parte real del producto uy*, Re{uy*}.
Para calcular las derivadas e integrales de (69) se ha utilizado un filtro Bessel de
cuarto orden con frecuencias de corte a 5 Hz y 100 Hz. Este filtro tiene la siguiente
ecuación de transferencia:
F ( s) =
bs 2
s 4 + a3 s 3 + a2 s 2 + a1s + a0
Con b = 142.5, a3 = 20.68, a2 = 158.3, a1 = 163.3 y a0 = 62.34. Por lo tanto las
ecuaciones estáticas de este filtro en forma de matriz son:
(72)
2 Desarrollo de los modelos
74
ydt
∫
0
y
0
dy =
dt 0
d 2 y −a0
2
dt
1
0
0
1
0
0
− a1
− a2
ydt
0
0 ∫ ∫
ydt
0 ∫
+ 0 u
1 y 0
−a3 dy b
dt
(73)
La ecuación (69) no sólo sirve para calcular la velocidad de rotación de la
máquina de inducción sino que también se puede utilizar para el cálculo de la
velocidad de deslizamiento y la velocidad del flujo del rotor.
En el caso del flujo del rotor sólo son necesarias unas modificaciones:
v1 =
1 d λR
LM d λR LM
L
=
+ jω ≅ jω M λR = jω ∫ v1dt
λR
LR dt
LR
LR
λR dt
(74)
Donde ω es la velocidad del flujo del rotor.
Para obtener la velocidad de deslizamiento se usan las ecuaciones (74) y
(75):
−
RR
v2 dt = jωS ∫ v1dt
LR ∫
(75)
Donde ωS es la velocidad de deslizamiento.
Por lo tanto, si se definen y1 y y2 del siguiente modo:
y1 = v1
y2 = −
RR
v2 dt
LR ∫
el flujo del rotor y la velocidad de deslizamiento se pueden calcular como el
cociente entre y1 y u o y2 y u, respectivamente.
2.4.2
Promedio de la velocidad del rotor
El método explicado en el capítulo anterior para estimar la velocidad de rotación
de un motor tiene el inconveniente de que se ve afectado negativamente por el ruido.
(76)
(77)
2 Desarrollo de los modelos
75
Sin embargo no supone un gran obstáculo ya que se puede remediar promediando las
variables.
Para aplicar el algoritmo se guardan los sucesivos valores de u y y se ordenan
en dos vectores en columna:
k
1
1
U k = (1 − λ ) 2 uk λ 2 uk −1...λ 2 u0
k
1
1
Yk = (1 − λ ) 2 yk λ 2 yk −1...λ 2 y0
T
(78)
T
(79)
Hay que prestar atención a que cada valor debe llevar el signo correcto.
Para conseguir que el promedio de los valores no quede desfasado en el
tiempo, se otorga a las muestras un peso relativo con una constante de tiempo τ. De
este modo la información más antigua va perdiendo peso con respecto al total.
τ =−
T
ln λ
(80)
Siendo T el periodo de muestreo. λ recibe el nombre “factor de olvido” y es un
número positivo entre 0 y 1. Un valor igual a 0 corresponde a una renovación
completa de la muestra en cada periodo mientras que un valor de 1 significa que las
muestras anteriores en el tiempo siguen teniendo peso en el futuro.
Tomando los vectores columna antes mostrados se puede reescribir la
velocidad del rotor del siguiente modo si se asume que la variación es muy pequeña
dentro del promedio.
Yk + EYk = ωRk (U k + EUk )
(81)
Donde EYk y EUk son vectores que contienen errores de cada muestra.
Utilizando el método de los mínimos cuadrados totales se obtiene el siguiente
resultado:
ωRk =
Yk
Uk
(82)
2 Desarrollo de los modelos
2.4.3
76
Bloque algoritmo de estimación de velocidad
En este apartado tan sólo hay que comentar que el algoritmo utilizado no se ha
desarrollado en este proyecto y necesita cuatro señales en magnitudes reales, las dos
tensiones VRrs y VSst y las dos intensidades iSr y iSs. El algoritmo proporciona la
velocidad del rotor, la velocidad de deslizamiento, la frecuencia eléctrica de
alimentación, la del flujo del rotor y un factor de r que indica la fiabilidad de los
resultados. El bloque se muestra a continuación, Figura 65:
1
vrsm
2
vstm
3
irm
4
ism
Vrs
fr
fs
Vst
f
Ir
Frf
Is
r
Estimador de velocidad
1
fr
2
fs
3
f
4
Frf
5
r
Figura 65. Bloque algoritmo de estimación de velocidad
2.4.4
Implantación en el laboratorio
La implantación requirió la captura de dos tensiones (VRrs, VSst) y de dos
corrientes (iSr, iSs) reales de un motor de inducción. Por ello fue necesario el empleo
de dos sondas de corriente y dos sondas de tensión.
Las señales capturadas no son suficientemente limpias como para introducirlas en
el estimador de velocidad por lo que se decidió diseñar un filtro sencillo RC para
limitar el ruido que se introducía en las ondas.
Se optó por tomar una frecuencia de corte del filtro de 100 Hz. Por lo que se
utilizó una resistencia de 3 kΩ y un condensador de 564 nF, ambos comerciales. Se
necesitaron cuatro filtros RC para la realización del experimento y el esquema
utilizado es muy simple como se ve en la Figura 66:
2 Desarrollo de los modelos
77
Figura 66. Filtro RC utilizado para eliminar el ruido
Con estos valores, la frecuencia de corte es:
wc =
1
1
=
= 591.0165rad / s
RC 3000 ⋅ 564 ⋅10−9
(83)
591.0165
= 94.06 Hz
2 ⋅ pi
(84)
Y en Hz:
wc =
A pesar de este filtro, la señal seguía teniendo un ruido excesivo por lo que se
decidió que lo mejor era filtrar de nuevo la señal pero esta vez digitalmente, es decir,
aquellos valores que son consecuencia del ruido se eliminaron y en su lugar se
introdujo el último valor aceptable. El filtro utilizado se muestra en la Figura 67 :
2 Desarrollo de los modelos
78
1/z
Unit Delay2
1
salida
1
entrada
Switch
1/z
Unit Delay
max
Constant
>=
Relational
Operator
min
<=
Constant1
Relational
Operator1
OR
Logical
Operator
Figura 67. Filtro utilizado para eliminar el ruido
Para comprobar que los resultados obtenidos son correctos, se acopló una dinamo
tacométrica al eje del motor de inducción. De este modo la velocidad real obtenida
por la dinamo y la estimada por el algoritmo pueden compararse.
Los resultados se expondrán en el capítulo 3.5.
3
Resultados
3 Resultados
3
80
Resultados
3.1
Introducción
En este capítulo se presentan y comentan los resultados obtenidos en la realización
del proyecto.
Como se ha ido viendo a lo largo de los diferentes capítulos, el desarrollo del
simulador de una turbina eólica para accionamiento de generadores eléctricos tiene una
carga importante de desarrollo de modelo para conseguir un resultado realista.
Por todo esto los resultados y con ellos las conclusiones del capítulo siguiente
están íntimamente relacionados con resultados de simulación por un lado y con
resultados de ensayos en el banco por otro.
3 Resultados
3.2
81
Emlulador de una turbina por medio de un control Tensión – Frecuencia
(V/F)
En el capítulo 2.1 se han explicado todos los pasos a seguir para realizar el modelo
que posteriormente se ha implantado, los pasos a seguir para configurar la tarjeta, los
esquemas de conexionado de las máquinas, los pasos para tener tensión en el laboratorio
y las precauciones que se deben tener para maniobrar.
El modelo del aerogenerador, como ha se ha comentado, tiene dos variables de
entrada: la velocidad del viento (V_viento) y el ángulo de los álabes del molino
(βpitch). Se ha optado por realizar el experimento con ángulo βpitch nulo y una
velocidad del viento inicial de 10m/s pasando seguidamente por medio de un escalón a
15m/s a los 20 segundos.
En el experimento se recogieron diferentes variables que evolucionan a lo largo del
tiempo. Esto fue posible como se comentó en el apaartado 2.1.3 gracias a la tarjeta de
adquisición de datos PCI 6024E integrada en la placa del ordenador.
Estas variables capturadas son las más importantes para conocer el estado del
sistema. Así se recogió la velocidad del rotor tanto en rpm como en rad/s, también se
recogieron la intensidad de la máquina de continua y por medio de unas determinadas
ganancias, el par generado por la propia máquina.
El resultado de la velocidad del rotor se muestra en la Figura 68:
1800
1600
1400
1200
1000
800
600
400
200
0
0
5
10
15
20
25
30
35
40
45
Figura 68. Evolución de la velocidad del rotor en rpm a lo largo del tiempo
3 Resultados
82
Antes de comentar el gráfico es necesario decir que en el comienzo del
experimento, el sistema estaba parado, de ahí que inicialmente la velocidad del rotor sea
nula como se puede ver en la Figura 68.
Seguidamente se percibe una rápida aceleración inicial hasta las 900
revoluciones por minuto,
también es posible advertir un ligero sobrepaso en la
velocidad por encima de la velocidad deseada hasta que se estabiliza en torno a las 1000
rpm.
A los 20 segundos se somete al sistema a un nuevo escalón en la velocidad del
viento de modo que el par generado es mayor, lo que se traduce en un incremento de la
velocidad de rotación como se puede apreciar en la Figura 69. Evolución de la
velocidad del rotor en rad/s. Con estas condiciones de viento, el sistema se estabiliza en
torno a las 1500 rpm.
Hay que destacar la gran cantidad de ruido generada por el sistema. Este ruido es
debido principalmente al deficiente acoplamiento entre la dinamo y el eje, ya que se
hizo mediante un acoplamiento de plástico apretado con bridas de plástico. Las
vibraciones generadas también se pueden deber a una no perfecta alineación de los ejes
y a las vibraciones internas características del banco de máquinas eléctricas.
Se trata de la misma figura que la anterior pero con la velocidad medida en rad/s,
lo que supone un cambio de escala.
En la Figura 69 se ve la misma velocidad del rotor pero en rad/s.
180
160
140
120
100
80
60
40
20
0
0
5
10
15
20
25
30
35
40
45
Figura 69. Evolución de la velocidad del rotor en rad/s
3 Resultados
83
La velocidad nominal de la máquina es de 1500 rpm o 157 rad/s, lo que supone
que una vez alcanzado el régimen permanente tras el segundo escalón, la velocidad era
prácticamente la nominal.
Otra variable importante en el experimento es la intensidad de la máquina de
continua, ya que con este valor es sencillo calcular el par generado porque son
proporcionales. La intensidad obtenida se muestra a continuación. Figura 70:
3.5
3
2.5
2
1.5
1
0.5
0
-0.5
-1
-1.5
0
5
10
15
20
25
30
35
40
45
Figura 70. Evolución de la corriente de la máquina de continua en amperios
Al igual que en el caso de la velocidad, se aprecia un rápido incremento de la
corriente al inicio, cuando se arranca el sistema. Se observa asimismo un pequeño
sobrepaso en el arranque y una estabilización en torno a los 1.6 amperios.
A los 20 segundos, momento en que la velocidad del viento crece en forma de
escalón, la corriente también aumenta apreciablemente hasta que se llega a un régimen
permanente de 2.4 amperios.
Estos resultados se contrastaron con un amperímetro colocado en serie con el
circuito de carga de la máquina de continua, obteniéndose el mismo resultado.
Por último sólo queda mostrar una variable necesaria para el correcto
funcionamiento del sistema, el par mecánico, que como ya se ha comentado
anteriormente es proporcional a la intensidad antes mostrada. Por lo que la gráfica será
la misma, Figura 71:
3 Resultados
84
4
8
x 10
6
4
2
0
-2
-4
0
5
10
15
20
25
30
35
40
45
Figura 71. Evolución de par de la máquina de continua en Nm
La única diferencia con la Figura 70 es un cambio de escala. Hay que explicar que el
par obtenido no es el que da directamente la máquina de continua sino que se trata de un
par proporcional. Esto se hace porque con los parámetros del aerogenerador y su
velocidad nominal, mucho más baja, no se consigue un par igual en la máquina de
continua por lo que se ha optado por aplicarle una ganancia.
Tanto en la Figura 70 como en la Figura 71 se aprecian importantes problemas
de ruido debidos posiblemente a las vibraciones internas de la bancada a consecuencia
de la alta velocidad de rotación del sistema.
3 Resultados
3.3
85
Acoplamiento de un encoder incremental y conexión a la tarjeta.
En este apartado se mostrará simplemente cómo se acoplaron todos los componentes
detallados en el capítulo 2.2.
El montaje es sencillo, tan sólo hay que preocuparse por intentar colocar el eje del
motor y el del encoder lo más alineados posible. En la Figura 72 se muestra una
fotografía del montaje:
Figura 72. Detalle del acoplamiento del encoder al eje del motor
La señal generada por el encoder se lleva a la tarjeta del Departamento de
Electrónica y Automática y se acopla por medio de un conector. En la fotografía
siguiente se puede observar el montaje completo.
Figura 73. Montaje completo del acoplamiento del encoder al eje del motor
3 Resultados
3.4
86
Control vectorial
En este apartado se van a exponer los resultados que se obtuvieron al realizar las
simulaciones de los esquemas del apartado 2.3. También se justificarán los resultados
obtenidos y comprobar que los datos son acordes a lo esperado
3.4.1
Resultados de los lazos de corriente
Como se ha visto en el 2.3.2.1 los lazos de corriente son exactamente iguales, esto
quiere decir que tanto las plantas como las constantes y ganancias son las mismas. Por
este motivo solo se mostrarán los resultados obtenidos en cualquiera de los dos lazos,
teniendo en cuenta que los resultados del otro serán los mismos. El esquema simulado
es el que se muestra en la Figura 74:
1
ids*
ids
1
s*Ti
Tm
Ki
uds
P(s)
1
Figura 74. Lazo de corrientes del sistema estudiado
En primer lugar se va a simular un escalón en la referencia de corriente de valor
unitario. El control proporcional integral calcula el mando y el resultado obtenido en la
corriente real se muestra en la Figura 75:
3 Resultados
87
1.4
1.2
X: 0.0007659
Y: 1.046
intensidad (pu)
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
1.2
tiempo (s)
1.4
1.6
1.8
2
-3
x 10
Figura 75. Evolución de la intensidad en el lazo de corriente
Se muestran tanto la referencia de corriente, en color azul, como la corriente real, en
color rojo. El escalón en la referencia se da a los 0.1 milisegundos y como se puede
observar, la gráfica cumple con las especificaciones con que se diseñó el lazo de
corriente. El tiempo de alcance esperado es de 0.5 milisegundos, y por otra parte, el
sobrepaso es de un 4.6% y se alcanza a los 0.6659 milisegundos.
Evidentemente los transitorios eléctricos son muy rápidos, del orden de
milisegundos, no así los mecánicos como se verá en el siguiente apartado.
3.4.2
Resultados del lazo de velocidad
En este apartado se mostrarán unos resultados cualitativamente parecidos al apartado
anterior en cuanto a la forma de las gráficas. Sin embargo serán cuantitativamente
diferentes ya que la planta del lazo es distinta, así como las constantes y ganancias.
El esquema de simulación se muestra en la Figura 76:
3 Resultados
88
1
1
wref*
Tm
w
Tm
Km
s*Tm
P3(s)
1
Figura 76. Lazo de velocidad del sistema estudiado
En este caso se va a volver a simular un escalón unitario en la referencia, es decir, se
va a simular que la velocidad referencia del eje pasa súbitamente de tener un valor nulo
a uno. Físicamente se está simulando el arranque de un motor desde un estado de parada
hasta velocidad nominal. La evolución de la velocidad real del motor se muestra en la
Figura 77:
1.4
1.2
X: 3.606
Y: 1.046
velocidad (pu)
1
0.8
0.6
0.4
0.2
0
0
1
2
3
4
5
6
tiempo (s)
7
8
9
10
Figura 77. Evolución de la velocidad de rotación
En la gráfica se muestra el escalón en la referencia a los 0.1 segundos (azul), y la
evolución de la velocidad del motor (rojo), cuyo tiempo de alcance es de poco menos de
3 Resultados
89
dos segundos y medio, mientras que su sobrepaso es de un 4.6%, de acuerdo con el
diseño previo.
El transitorio mecánico es mucho más lento que el eléctrico, del orden de segundos.
Por lo tanto, cuando se muestren los resultados del los lazos de corriente en el lazo de
velocidad se observará cómo éste último domina sobre los primeros.
3.4.3
Resultados de los lazos de corriente dentro del lazo de velocidad.
En este apartado se mostrarán los resultados obtenidos en las simulaciones del
esquema del capítulo 2.3.3, cuyo esquema de simulación se muestra en la Figura 78:
wref
1
1
T_base*Tm.s
wr
Km
iqs
Lr/Lm
w
1
T_base*Ti.s
uqs
Ki
1/a
T_base/a.s+1
iqs
Par motor
Lm/Ksigmar
flujo
ids
1/Lm
1
T_base*Ti.s
uds
Ki
1/a
T_base/a.s+1
1/B
w
1
T_base*J/B.s+1
Par_resis
ids
V vs w
Figura 78. Modelo de simulación completo en el que los lazos de corrientes están
integrados en el lazo de velocidad
Se simulará un escalón en la referencia de velocidad de valor unitario con un par
resistente de 0.1 pu y sin rozamiento viscoso B. se procede de este modo para que los
resultados coincidan claramente con los previstos en el diseño.
3 Resultados
90
1.2
1
X: 4.39
Y: 1.051
velocidad (pu)
0.8
0.6
0.4
0.2
0
-0.2
0
1
2
3
4
5
6
tiempo (s)
7
8
9
10
Figura 79. Evolución de la velocidad y escalón de referencia
En la Figura 79 se muestra un escalón en la referencia en el primer segundo y como
se observa, el tiempo de alcance real de la velocidad es de aproximadamente segundo y
medio. Por otro lado, el sobrepaso es un poco mayor que en los apartados anteriores
debido a la inclusión de los lazos de corriente dentro del esquema, que distorsionan el
resultado final. Sin embargo el resultado es muy parecido, siendo en este caso un 5.1%.
A continuación se muestran las evoluciones de las dos corrientes: isd, Figura 80,
y isq, Figura 81:
3 Resultados
91
0.7
X: 3.518
Y: 0.5525
0.6
isd (pu)
0.5
0.4
0.3
0.2
0.1
0
0
1
2
3
4
5
6
tiempo (s)
7
8
9
10
Figura 80. Evolución de la intensidad de estator en eje d
La intensidad del estator en eje d viene determinada en todo momento por el flujo del
rotor. Ya que se optó por la estrategia de flujo nominal, isd siempre va a ser el flujo
dividido por la inductancia mutua Lm, resultando un valor de 0.5525 pu, igual que en la
gráfica mostrada.
Además se observa en la Figura 80 que a los 3.518 segundos sufre una pequeña
caída. Este tiempo equivale a 2.5 segundos desde el escalón de referencia y coincide
con el momento en que la velocidad alcanza la referencia.
3
2.5
isq (pu)
2
1.5
1
0.5
X: 10
Y: 0.1115
0
-0.5
0
1
2
3
4
5
6
tiempo (s)
7
8
9
10
Figura 81. Evolución de la intensidad de estator en eje q
3 Resultados
92
Como ya se comentó en el apartado 2.3.1, isq controla el par entregado por el motor.
En este caso el par se fijó a 0.1 pu y como el flujo del rotor es nominal según la
ecuación (61), isq tomará un valor de aproximadamente 0.11 pu en régimen permanente.
Se observa en la Figura 81 que isq alcanza un valor máximo próximo a 3 pu. En
posteriores esquemas se limitará este valor de arranque para no someter al motor a
corrientes elevadas.
Hay otros dos valores importantes para el desarrollo del proyecto y que se utilizarán
en el siguiente apartado 3.4.4. Se trata de las tensiones ficticias usd y usq, estas tensiones
se utilizarán para el desacoplo de las ecuaciones (12) y (13). Por este motivo se van a
mostrar a continuación las gráficas donde aparece su evolución a lo largo del tiempo:
0.28
0.275
X: 3.518
Y: 0.271
usd (pu)
0.27
0.265
0.26
0.255
0
1
2
3
4
5
6
tiempo (s)
7
8
9
10
Figura 82. Evolución de la tensión usd
1.6
1.4
1.2
usq (pu)
1
0.8
0.6
0.4
X: 10
Y: 0.05466
0.2
0
-0.2
0
1
2
3
4
5
6
tiempo (s)
7
8
9
10
Figura 83. Evolución de la tensión usq
3 Resultados
93
Se observa a simple vista que las gráficas correspondientes a isd e isq son muy
parecidas a usd y usq, respectivamente.
3.4.4
Resultados del PWM vectorial (SVPWM).
En este apartado se mostrarán los resultados de las simulaciones realizadas a partir
del esquema de la 2.3.4, cuyo esquema de simulación se muestra en la Figura 84:
Uds
d
Uqs
q
sen
d'
usD
q'
usQ Vectorial
d,q -> d`,q`
cos
PWM
ts i
t's+sec
(Lim. Hex.)
d,q -> d',q'
s1
s1
s2
s2 Inversor
s3
s3
Gen_conmutación
Vc
Vc
Vcond
Gen.
Pulsos
Un
Trifásico Vn
(ideal)
vcond
Wn
inversor_Uf
PWM_Vectorial_lh
sqrt(2)*U_base
Vcond
0
rotor
n_rpm
VSrs
VSst
VStr
a
b
Terminator4
cos
iRr
Terminator2
iRs
ángulo
w
w
Gain
sen
SIN
cos
COS
d/2 sen_X*d
Terminator6
q
iqs
a,b -> d,q1
Terminator3
Terminator5
VRtr
n_rpm
Tem
par_mot
Carga
th_mec
Motor_asíncrono_(a)
par_res
Carga Motora
Par_resis
cos_X*d
Terminator7
Sen, Cos, Comp_teta
Figura 84. Esquema utilizado en la simulación que representa el control vectorial, un
motor de inducción y una carga
En él se calculan las tensiones que alimentan al motor a partir de las tensiones de
referencia vsd y vsq.
Tomando los valores de régimen permanente de las simulaciones anteriores se han
calculado los valores de vsd y vsq. Los valores tomados fueron: ωr = 0.5, ω = 0.54, λr = 1,
isd =0.5525, isq = 0.1083, usd = 0.271 y usq = 0.0518, todos ellos en pu. Despejando el
valor de vsd y vsq se obtiene: vsd = 0 0.0101 y vsq = 0.5420.
A continuación se van a mostrar las tensiones de alimentación al motor que calcula el
PWM vectorial, Figura 85:
ids
iRt
Terminator1
teta
d
a,b -> d,q
sen (a+b+c = 0)
iSt
Motor
VRrs Inducción
(mod. din.)
VRst
iSr
iSs
w
3 Resultados
94
200
150
100
tensión (V)
50
0
-50
-100
-150
-200
0
0.01
0.02
0.03
0.04
tiempo (s)
0.05
0.06
0.07
0.08
Figura 85. Alimentación al motor de inducción
En la Figura 86 se muestra un detalle de la Figura 85:
180
160
140
tensión (V)
120
100
80
60
40
20
0
0.04
0.042 0.044 0.046 0.048 0.05
tiempo (s)
0.052 0.054
0.056 0.058
Figura 86. Ampliación de la alimentación al motor de inducción
Como se ve se trata de una serie de pulsos de valor 179.62 V de diferente anchura. El
primer armónico es el que entrega potencia al motor por eso se va a utilizar el comando
“fft” de Matlab para obtener el espectro de frecuencias que compone la modulación de
ancho de pulso. El resultado se muestra en la Figura 87:
3 Resultados
95
180
160
140
120
100
80
60
40
20
0
0
200
400
600
800
1000
1200
1400
Figura 87. Espectro en frecuencia de la alimentación del motor de inducción
Se observa como hay un armónico principal a una frecuencia baja, que corresponde
con unos 25Hz, que es la frecuencia de alimentación. La amplitud es de unos 170 V, así
el primer armónico es una onda senoidal de 170 V de pico y frecuencia 25Hz.
3.4.5
Resultados del control de velocidad utilizando un control vectorial.
En este apartado se muestran los resultados obtenidos al simular un control de
velocidad de un motor de inducción cuyo esquema se muestra en la Figura 88.
VSrs
VSrs
iSr
[isdr]
Control MI VSst
VSst
iSs
[isqr]
w_ref
escalón de velocidad
wr
[wr]
wr_real
VStr
iSt
VStr
Motor
VRrs Inducción
iRr Terminator2
Terminator3
(mod. din.) iRs
VRst
iRt Terminator
0
VRtr
rotor
n_rpm
Gain1
n_rpm
Tem
Terminator1
par_mot
th_mec
[th_mec]
par_res
Motor_asíncrono_(a)
0.1
rotor1
Goto2
Carga
wr
w
Carga Motora
M_base
Gain11
Figura 88. Esquema simplificado del control de velocidad
[wr]
Goto1
3 Resultados
96
El objetivo consiste en someter al motor asíncrono a un escalón en la velocidad de
referencia y observan como varían los diferentes parámetros durante el transitorio.
Para ello se ha aplicado un escalón de velocidad que lleva al motor desde velocidad
inicial nula a la mitad del régimen nominal como se observa en la Figura 89:
0.6
0.5
X: 2.533
Y: 0.5
velocidad (pu)
0.4
w ref
w real
0.3
0.2
0.1
0
-0.1
0
1
2
3
4
5
tiempo (s)
6
7
8
9
Figura 89. Evolución de la velocidad del motor de inducción
Como se puede observar, el tiempo de alcance coincide con el diseñado en apartados
anteriores, es decir, la velocidad real alcanza la referencia en aproximadamente 2.5
segundos. Además, debido a la utilización de un control PI en régimen permanente el
error entre referencia y salida es nulo.
Otros parámetros de interés son las intensidades isd e isq. Como ya se ha comentado
en el capítulo 2.3.2.1, el valor de isd viene fijado automáticamente al haber optado por
una estrategia de flujo nominal por lo que tomará un valor constante de 0.55 pu por la
ecuación (59). A continuación se muestra la evolución de isd en el tiempo, Figura 90:
3 Resultados
97
0.6
isd (pu)
0.58
0.56
0.54
0.52
0.5
1
2
3
4
5
teimpo (s)
6
7
8
Figura 90. Evolución de la intensidad isd
Si se realiza una ampliación:
0.58
0.57
isd (pu)
0.56
0.55
0.54
0.53
5.942
5.944
5.946
5.948
teimpo (s)
5.95
5.952
5.954
Figura 91. Ampliación de la intensidad isd
Como se observa, el valor de la intensidad varía en torno a 0.55 pu pero tiene una
pequeña oscilación sobre el valor medio. Esto se debe a que el motor se alimenta con
un PWM. La carga filtra un tanto la señal aunque sigue teniendo pequeños picos.
La intensidad isq viene fijada también por la estrategia elegida, de modo que en
valores unitarios coincide con el par aplicado a la carga en régimen permanente. Por
esto, al haber aplicado un par de 0.1 pu, el valor de régimen permanente de la intensidad
isq debe coincidir, Figura 92.
3 Resultados
98
1.6
1.4
1.2
isq (pu)
1
0.8
0.6
0.4
X: 8.222
Y: 0.1127
0.2
0
-0.2
0
1
2
3
4
5
tiempo (s)
6
7
8
9
Figura 92. Evolución de la intensidad isq y ampliación de la misma
Si se realiza una ampliación en la zona de régimen permanente:
0.16
0.14
isq (pu)
0.12
0.1
0.08
0.06
0.04
7.833
7.834
7.835
7.836 7.837
tiempo (s)
7.838
7.839
7.84
Figura 93. Ampliación de la intensidad isq
Se observa en la Figura 92 cómo durante el transitorio isq crece rápidamente
puesto que la máquina está arrancando y una vez alcanzado el régimen permanente, se
estabiliza en torno a 0.1 pu. Isq es un poco superior que el par resistente en pu debido a
la relación (60).
Por último, es importante saber cómo evoluciona la intensidad real del estator
del motor, puesto que al utilizar PWM para gobernar el motor, la intensidad de estator
puede tener un rizado no admisible. A continuación se muestra la intensidad de estator
capturada, Figura 94 y una ampliación de la misma para comprobar el rizado Figura 95:
3 Resultados
99
25
20
15
10
iSr (A)
5
0
-5
-10
-15
-20
-25
6.72
6.74
6.76
6.78
6.8
tiempo (s)
6.82
6.84
6.86
6.88
Figura 94. Evolución de la intensidad de estator iSr
20
15
iSr (A)
10
5
0
-5
7.204
7.206
7.208
7.21 7.212 7.214
tiempo (s)
7.216
7.218
7.22
Figura 95. Detalle de la evolución de la intensidad de estator iSr
En la Figura 94 se observa cómo la intensidad de estator iSr es claramente senoidal y
alcanza un valor de pico de aproximadamente 21 amperios, lo que supone una
intensidad eficaz de 14.84 A que equivale a 0.57 pu.
En la Figura 95 se observa nítidamente el pequeño rizado de la corriente, que varía
entre 0.5 A en la parte central de la onda y 2 o 3 A en las crestas. Éste era uno de los
objetivos principales del uso de un control vectorial para gobernar el motor de
inducción. Este rizado depende en gran medida de la frecuencia de conmutación usada
en el bloque “PWM vectorial”, y en este caso se fijo a 9 kHz, que es un valor
comúnmente usado en la práctica. A medida que se aumenta este valor mejora el rizado
y viceversa.
3 Resultados
3.4.6
100
Resultados de la simulación completa de un aerogenerador.
En este último apartado del capítulo 3.4, se van a exponer los resultados obtenidos al
simular el emulador de una turbina eólica completa acoplada a red.
Como ya se ha comentado en el capítulo 2.3.7, se han desarrollado los modelos que
simulan el funcionamiento de aerogenerador que actúa sobre una máquina de continua
que hace las veces de generador.
Nótese cómo en este apartado la variable de entrada al sistema ya no es la velocidad
de rotación que debe seguir el motor de inducción. En este apartado se introducen la
velocidad del viento (Vviento) y el ángulo de ataque de los álabes (pitch angle). El
modelo del aerogenerador utiliza estos dos valores, junto con el par resistente del
sistema, para calcular la referencia de velocidad que se introduce en el control del motor
de inducción. Finalmente el motor calcula el par motor que actúa sobre el generador y
éste sobre la carga como se vio en la Figura 63.
Se realizaron diferentes simulaciones, todas ellas con βpitch nulo y para diferentes
condiciones de viento. El esquema simulado es el que se muestra en la
0
Constant
5
Constant3
Sine Wave1Retardo1
pitch
velocidad (rpm)
viento (m/s)
Tem
VSrs
VSrs
iSr
[isdr]
Control MI VSst
VSst
iSs
[isqr]
w_ref
Par_resis
wr
wr_real
VStr
Par_eol
iSt
VStr
Motor
VRrs Inducción
Turbina eólica +
Transmisión mecánica
(referida al eje del generador)
0
VRst
iRt
VRtr
Tem
rotor
n_rpm
Gain1
Ucc_exc
Ucc_exc
Ucc Motor DC
w
iRr
(mod. din.) iRs
Iexc
Icc
Ecc
Par
th_mec
n_rpm
Motor_asíncrono_(a)
[th_mec]
Goto2
Iexc
-1
Ecc
Motor de Continua
par_mot
Carga
w
par_res
R_carga
Icc
Carga Motora
Figura 96. Esquema completo de simulación
[wr]
Goto1
3 Resultados
101
3.4.6.1 Golpe de viento
En la primera de las simulaciones se sometió al modelo del aerogenerador a un
escalón en la velocidad del viento de 0.3 m/s como se ve en la Figura 97:
0.3
velocidad del viento (m/s)
0.25
0.2
0.15
0.1
0.05
0
0
5
10
tiempo (s)
15
20
Figura 97. Escalón de viento
Los resultados obtenidos se muestran a continuación.
11.2
11
velocidad (rpm)
10.8
10.6
10.4
10.2
10
9.8
9
10
11
12
13
14
15
tiempo (s)
16
17
18
19
Figura 98. Evolución de la velocidad de rotación de la turbina
3 Resultados
102
Primeramente se ha mostrado la evolución de la velocidad de la turbina eólica
como consecuencia del golpe de viento, Figura 98. Se observa cómo la velocidad pasa
de tener un valor de 9.7 a 11.2 rpm en régimen permanente.
0.49
0.48
0.47
w ref
w sal
velocidad (pu)
0.46
0.45
0.44
0.43
0.42
0.41
0.4
9
10
11
12
13
14
15
tiempo (s)
16
17
18
19
Figura 99. Evolución de la velocidad de rotación de la turbina y del motor de
inducción
En la Figura 99 se muestra cómo ha variado la velocidad de rotación tanto de la
turbina eólica (curva azul) como del motor de inducción (curva magenta). En ella se
puede apreciar cómo la turbina adquiere rápidamente una velocidad mayor debido al
golpe de viento mientras que el motor intenta seguir esa referencia y finalmente ambas
velocidades se igualan. Se observa asimismo que el tiempo de alcance de la salida
(motor), es aproximadamente 2 segundos, un poco menos que en el diseño del control
debido a que influyen varias dinámicas, la de la turbina eólica y la del propio motor.
Otras magnitudes interesantes son las intensidades del estator del motor. A
continuación se muestran las corrientes isd Figura 100 e isq Figura 101. La primera de
ellas, como ya se ha comentado adquiere un valor constante de 0.55 pu por la estrategia
de flujo nominal elegida. La segunda de ellas varía con el tiempo ya que el motor
entrega más potencia a la carga para adaptarse a las nuevas condiciones del viento.
3 Resultados
103
0.59
0.58
intensidad (A)
0.57
0.56
0.55
0.54
0.53
0.52
9
10
11
12
13
14
15
tiempo (s)
16
17
18
19
Figura 100. Evolución de la corriente isd a lo largo del tiempo
0.6
0.55
intensidad (pu)
0.5
0.45
0.4
0.35
0.3
0.25
9
10
11
12
13
14
15
tiempo (s)
16
17
18
19
Figura 101. Evolución de la corriente isq a lo largo del tiempo
Uno de los objetivos de la utilización de un control electrónico mediante PWM era
disminuir el rizado de la corriente del estator del motor evitando así un alto contenido
de armónicos. Para ello se ha capturado esta corriente en amperios y se muestra a
continuación Figura 102, así como una ampliación de la misma Figura 103.
3 Resultados
104
30
20
intensidad (A)
10
0
-10
-20
-30
17.62 17.64 17.66 17.68
17.7 17.72 17.74 17.76 17.78
tiempo (s)
17.8
Figura 102. Evolución de la corriente del estator del motor de inducción
Se observa que la intensidad tiene un valor de pico de aproximadamente 24
amperios, lo que supone unos 17 A eficaces, que traducido a magnitudes unitarias es
0.65 pu en régimen permanente.
25
20
intensidad (A)
15
10
5
0
-5
-10
-15
17.67
17.675
17.68
tiempo (s)
17.685
17.69
Figura 103. Ampliación de la corriente de estator del motor
En esta Figura 103, se ve claramente que el rizado de la corriente es mínimo,
alcanzándose un valor máximo de unos 2 A en la cresta de la onda y tan sólo medio o
un amperio en la parte central.
El responsable de este rizado tan pequeño es la elevada frecuencia de conmutación
del PWM, que genera una serie de pulsos en la tensión de alimentación al motor cuyo
3 Resultados
105
primer armónico es muy superior al resto de armónicos como ya se vio en el apartado
3.4.4. Seguidamente se muestra la tensión aplicada al motor Figura 104, así como un
detalle de la misma Figura 105.
300
200
tensión (V)
100
0
-100
-200
-300
17.5
17.52 17.54 17.56 17.58 17.6 17.62 17.64 17.66 17.68
tiempo (s)
Figura 104. Tensión de alimentación al motor de inducción
400
350
300
tensión (V)
250
200
150
100
50
0
-50
17.32
17.321 17.322 17.323 17.324 17.325 17.326 17.327 17.328
tiempo (s)
Figura 105. Ampliación de la tensión de alimentación del motor
La frecuencia de conmutación utilizada en el PWM ha sido elevada, de 9 kHz
para que el rizado de la corriente sea mínimo.
3 Resultados
106
Por último se muestra la una gráfica con la potencia que entregaría el
aerogenerador simulado a la red. Se aprecia cómo un cambio pequeño en la velocidad
del viento (0.3 m/s) supone un incremento mayor en la potencia generada (70W).
480
460
potencia (W)
440
420
400
380
360
9
10
11
12
13
14
15
tiempo (s)
16
17
18
19
Figura 106. Potencia entregada por el generador
3.4.6.2 Viento escalonado
En este apartado se ha sometido al aerogenerador a una serie de golpes de viento
consecutivos intentando simular posibles escenarios en que se pueda encontrar en la
realidad, Figura 107.
0.6
velocidad del viento (m/s)
0.5
0.4
0.3
0.2
0.1
0
10
15
20
25
tiempo (s)
30
35
40
Figura 107. Sucesión de escalones de viento
3 Resultados
107
A continuación se muestra la velocidad de la turbina eólica a lo largo del tiempo
Figura 108:
12
11.5
velocidad (rpm)
11
10.5
10
9.5
9
5
10
15
20
25
30
tiempo (s)
35
40
45
50
Figura 108. Evolución de la velocidad de la turbina eólica ante viento escalonado
Sencillamente se han ido añadiendo escalones en la velocidad del viento durante los
veinte primeros segundos para más adelante restárselos. Se aprecia que la velocidad de
la turbina varía desde 9.2 a 10.8 rpm.
Seguidamente se muestra la velocidad de la turbina junto con la de motor de
inducción Figura 109:
0.52
w ref
w sal
0.5
velocidad (pu)
0.48
0.46
0.44
0.42
0.4
0.38
5
10
15
20
25
30
tiempo (s)
35
40
45
50
Figura 109. Evolución de la velocidad de la turbina eólica y del motor
3 Resultados
108
Se observa cómo el motor de inducción (color magenta) intenta seguir la referencia
dada por la turbia eólica (color azul). Este seguimiento no es todo lo perfecto que se
desearía debido que los escalones en la velocidad del viento distan entre sí tan sólo 4
segundos.
3.4.6.3 Viento racheado
En este apartado se someterá al modelo del aerogenerador a unas condiciones de
viento racheado, es decir, un viento que cambia continuamente a lo largo del tiempo.
Para simular estas condiciones de viento se ha introducido como velocidad del viento
una onda senoidal de amplitud 0.3 m/s, .
0.3
velocidad del viento (m/s)
0.2
0.1
0
-0.1
-0.2
-0.3
8
10
12
14
16
tiempo (s)
18
20
22
Figura 110. Viento racheado
El resultado se muestra a continuación Figura 111 y Figura 112:
11
velocidad (rpm)
10.5
10
9.5
9
8.5
8
10
12
14
16
tiempo (s)
18
20
22
24
Figura 111. Evolución de la velocidad de la turbina eólica ante viento racheado
3 Resultados
109
Se aprecia que una oscilación de tipo senoidal en la velocidad del viento se traduce
en una salida también de forma senoidal en la turbina eólica.
0.48
w ref
w sal
0.46
velocidad (pu)
0.44
0.42
0.4
0.38
0.36
8
10
12
14
16
tiempo (s)
18
20
22
24
Figura 112. Evolución de la velocidad de la turbina eólica y del motor de inducción
En esta Figura 112 se observa cómo la velocidad del motor (color magenta) sige la
referencia (color azul) con un cierto retraso. Esto se debe a la utilización del control PI
utilizado y a su diseño, aunque es extraño encontrar un viento que varíe tan rápidamente
a lo largo del tiempo y continuamente con esta forma. Es más frecuente encontrar
vientos que cambian en su velocidad como el mostrado en el aparatado 3.4.6.1.
3 Resultados
3.5
110
Algoritmo de estimación de velocidad.
En este apartado se van a exponer los resultados obtenidos al realizar un ensayo en el
laboratorio de máquinas eléctricas de ICAI. Este ensayo consistió en capturar dos
tensiones y dos corrientes del motor de inducción e introducirlas en un algoritmo
diseñado para estimar la velocidad a la que gira el motor.
Como ya se ha comentado en el apartado 2.4.4, se utilizaron varios filtros antes de
proceder a introducir las diferentes señales en el estimador.
Se realizaron dos pruebas, en la primera de ellas se utilizó el programa Simulink de
Matlab para aplicar una referencia de velocidad al motor mientras que en la segunda de
ellas se utilizó el propio potenciómetro del variador de tensión frecuencia para simular
unas condiciones de velocidad.
3.5.1
Resultados controlando la velocidad con Simulink.
En el primer experimento que se realizó, se utilizó la plataforma Simulink para
recrear unas posibles condiciones de velocidad. Se empleó un bloque “Repeating
Sequence” y se generaron una serie de pulsos con un periodo de ocho segundos
Las señales capturadas (VRrs, VSst, iSr, iSs) fueron filtradas como ya se ha
comentado y el resultado fue el siguiente:
200
VSrs (V)
100
0
-100
-200
0
5
10
15
20
25
tiempo (s)
200
VSst (V)
100
0
-100
-200
0
5
10
15
20
tiempo (s)
Figura 113. Tensiones filtradas VSrs y VSst
3 Resultados
111
iSr (A)
10
0
-10
2
4
6
8
10
12
tiempo (s)
14
16
18
20
2
4
6
8
10
12
tiempo (s)
14
16
18
20
iSs (A)
10
0
-10
Figura 114. Corrientes filtradas iSr e iSs
En estas figuras tan sólo se aprecian los módulos de las tensiones y corrientes, por lo
que para decidir si son señales válidas para el algoritmo, se realizará una ampliación de
modo que estén sincronizadas para observar la diferencia en el tiempo entre ellas.
100
VSrs (V)
50
0
-50
5
5.05
5.1
5.15
5.2
5.25
tiempo (s)
5.3
5.35
5.4
5
5.05
5.1
5.15
5.2
5.25
tiempo (s)
5.3
5.35
5.4
VSst (V)
50
0
-50
-100
Figura 115. Ampliación de las tensiones filtradas VSrs y VSst
Como se puede apreciar en las figuras, a pesar de capturar una tensión que
originariamente es un PWM, la señal queda muy limpia gracias principalmente a los
filtros empleados.
3 Resultados
112
iSr (A)
2
0
-2
5
5.05
5.1
5.15
5.2
5.25
tiempo (s)
5.3
5.35
5.4
5
5.05
5.1
5.15
5.2
5.25
tiempo (s)
5.3
5.35
5.4
3
iSs (A)
2
1
0
-1
-2
Figura 116. Ampliación de las corrientes filtradas iSr e iSs
En este caso, las corrientes no tienen un aspecto tan bueno como las tensiones pero
en todo caso servirá para realizar las simulaciones.
Una vez se han introducido las señales en el algoritmo, éste estima la velocidad
siendo el resultado el que se muestra el la Figura 117:
velocidad (pu)
Velocidad capturada por la dinamo
0.4
0.3
0.2
0.1
2
4
6
8
10
12
14
tiempo (s)
Velocidad estimada
16
18
20
2
4
6
8
16
18
20
velocidad (pu)
0.5
0.4
0.3
0.2
0.1
10
12
tiempo (s)
14
Figura 117. Velocidad capturada por la dinamo y estimada
3 Resultados
113
Estas dos gráficas muestran la velocidad del motor de inducción, la primera de ellas
corresponde al estimador y la segunda a la dinamo tacométrica. Se distingue una silueta
muy parecida en ambas por lo que podemos concluir que el estimador ha funcionado
correctamente aunque el ruido de la señal sea elevado.
Se observa que el estimador de velocidad tiene problemas al calcular la velocidad
mientras ésta varía, en los transitorios. Sin embargo, se observa que en los momentos
iniciales en que la velocidad es constante, el estimador proporciona un valor
perfectamente definido.
Además se han calculado una serie de valores estadísticos para conocer el grado de
certeza de los resultados. Por ello se ha calculado el error entre ambas señales,
velocidad capturad y estimada, así como la media, varianza y desviación típica del
mismo. El error se muestra en la Figura 118:
0.2
0.15
error de velocidad (pu)
0.1
0.05
0
-0.05
-0.1
-0.15
-0.2
0
5
10
15
20
25
tiempo (s)
Figura 118. Error de la velociad estimada
Se observa que el error oscila en torno a cero y en detalle no sobrepasa los 0.5 pu en
los casos donde el ruido no distorsiona la señal.
La media de este error calculado es 0.0016 pu, la varianza 0.0009545 y la desviación
típica 0.0309 pu por lo que se puede concluir que la estimación es correcta.
El estimador proporciona otros parámetros como la velocidad de deslizamiento, la de
alimentación y el flujo de rotor pero su estudio no entra dentro de los objetivos.
3 Resultados
3.5.2
114
Resultados controlando la velocidad con un potenciómetro.
En este segundo experimento se controlo el motor de inducción desde el panel de
control que utiliza el variador. La velocidad varía en función del valor que marque el
potenciómetro que lleva integrado.
El procedimiento seguido fue el mismo que el detallado en el apartado 3.5.1 y las
señales introducidas al estimador en ese apartado son parecidas a las de éste por lo que
se procederá directamente a comparar las velocidades capturadas Figura 119:
Velocidad capturada por la dinamo
velocidad (pu)
0.5
0.4
0.3
0.2
0.1
2
4
2
4
6
8
tiempo (s)
Velocidad estimada
10
12
14
10
12
14
velocidad (pu)
0.6
0.4
0.2
6
8
tiempo (s)
Figura 119. Velocidad medida y estimada.
En este caso también se ha calculado el error entre ambas señales resultando la
siguiente Figura 120:
3 Resultados
115
0.15
error de velocidad (pu)
0.1
0.05
0
-0.05
-0.1
2
4
6
8
tiempo (s)
10
12
14
Figura 120. Error en la medida
En este caso el error vuelve a oscilar alrededor del valor cero aunque con un ruido
más acusado. También se han hallado la media (0.0054 pu), varianza (0.00015) y
desviación típica (0.0391 pu) y analizando los valores es evidente que la estimación ha
sido correcta.
4
Conclusiones
4 Conclusiones
4
117
Conclusiones
Este capítulo se ha planteado no sólo con la idea de ser un listado de conclusiones
más o menos técnicas sino que se pretende recoger también las impresiones finales,
ideas surgidas del desarrollo del mismo, aspectos a mejorar, etc.
Lo primero que se plantea es la consecución de los objetivos planteados. Como se
comentó en el capítulo 1.3, los objetivos iniciales del proyecto sufrieron una serie de
modificaciones a causa de la avería, por causas externas al proyecto, de un variador V/F
necesario para el último objetivo.
Los principales objetivos fueron los que se muestran en la Ilustración 1, además se
citan algunos de los recursos utilizados y diseños realizados.
Ilustración 1. Objetivos principales, recursos y diseños.
Como se ha podido comprobar a lo largo de la lectura del proyecto, los nuevos
objetivos se han alcanzado, obteniendo resultados relevantes mostrados en el capítulo 3.
Bien es cierto sin embargo que el tiempo empleado para cada uno de ellos no se ha
ajustado a lo previsto inicialmente.
A continuación se va a realizar un repaso de los principales objetivos
4 Conclusiones
118
En cuanto al apartado de la recreación del experimento llevado a cabo por César
Aguiar en su PFC 2004/2005, lo primero fue familiarizarse con las máquinas usadas en
el proyecto así como su funcionamiento y protocolos de actuación. Se renovó el
software del ordenador instalando la versión 7.0.1 de Matlab con todos sus
componentes para realizar los ensayos.
Se implantaron los diseños desarrollados previamente y el sistema funcionó de
acuerdo con las expectativas, obteniendo los resultados ya mostrados en el capítulo 3.2.
Hay que destacar la gran cantidad de ruido en la señal proporcionada por la dinamo
debido principalmente a las vibraciones del banco número 4 del laboratorio. Sin
embargo esto no conllevó al mal funcionamiento del modelo.
Atendiendo al apartado de control vectorial, sin duda fue la sección más laboriosa
debido a la complejidad de los conceptos usados. Fue imprescindible desarrollar los
modelos paso a paso, asegurando que cada nuevo escalón alcanzado funciona
correctamente. Asimismo, se obtuvieron excelentes resultados en cuanto a la emulación
de un accionamiento de turbinas, mostrados en el capítulo 3.4. Se logró controlar la
velocidad de rotación de un motor de inducción con una corriente de estator con un
rizado mínimo. Esta es una de de las ventajas de la utilización de un control vectorial
(SVPWM, Space Vector Pulse Width Modulation), regulando la frecuencia de
conmutación del PWM se consiguen rizados de corriente considerablemente pequeños.
Debido al gran número de operaciones que debe realizar el ordenador, es
conveniente utilizar un procesador potente, ya que en caso contrario no se llega a
visualizar los gráficos adecuadamente.
Por último se acometió la implantación de un algoritmo de estimación de la
velocidad en el laboratorio de máquinas eléctricas. Se utilizaron diferentes recursos
prestados por la escuela como sondas de tensión y corriente y los componentes
necesarios para confeccionar filtros. Hubo problemas a la hora de la conexión de la
bornas de las sondas debido a que en las conexiones se filtraba una gran cantidad de
ruido. Aun así, se obtuvieron unos buenos resultados como se puede apreciar en el
capítulo 3.5.
4 Conclusiones
119
Sólo añadir que se utilizaron distintos modelos desarrollados previamente por los
directores de proyecto y en el PFC 2004/2005, indispensables para la realización del
presente proyecto.
Se sugiere que en próximos proyectos se acometa la implantación del control
vectorial desarrollado en este PFC en el laboratorio de máquinas eléctricas de la escuela
utilizando un encoder incremental.
Este proyecto se ha centrado en la energía eólica, más en concreto turbinas eólicas.
Sin embargo es posible modificar las características del modelo del aerogenerador para
emular el funcionamiento de cualquier otro tipo de turbinas, de gas, de vapor, etc. Por
ello es aconsejable continuar el presente proyecto por esta vía.
5
Bibliografía
5
Bibliografía
El presente proyecto se ha desarrollado y diseñado con las ideas y explicaciones de
los directores de proyecto junto con los conocimientos propios.
Sin embargo se han utilizado diferentes libros para diseñar los controles PI y páginas
web para la realizar la introducción y describir las distintas tecnologías empleadas.
Los libros utilizados fueron:
MÁQUINAS ELÉCTRICAS (Cuarta Edición) Jesús Fraile Mora
REGULACIÓN AUTOMÁTICA F. Luís Pagola Septiembre de 2002
PFC 2004/2005 Emulador de Turbinas para Accionamiento de Generadores
Eléctricos. César Aguiar.
Rotor speed estimation for induction motors using voltaje and current
measurements. J.L. Zamora, A. García Cerrada, A. Zaro
Algunas de las direcciones son las siguientes:
www.ree.es
www.ree.es/cap07/estadistico.htm
www.redeweb.com/microbit/articulos/660503.pdf
www.redeweb.com/microbit/articulos/520703.pdf
iie.fing.edu.uy/~gcp/a6.pdf
www2.ing.puc.cl/power/alumno03/alternativa.htm
www.windpower.org/en/core.htm
roble.pntic.mec.es/csoto/eolica.htm
www.revistafuturos.info/futuros_6/eolica_1.htm
www.infoeolica.com/grandes.html
5 Bibliografía
www.cea-ifac.es/actividades/ jornadas/XXI/documentos/ja00_100/ja00_100.pdf
www.gte.us.es/ASIGN/SEFER_2IE/practicas/Practica3.pdf
thales.cica.es/rd/Recursos/ rd99/ed99-0226-01/capitulo1.html
thales.cica.es/rd/Recursos/ rd99/ed99-0226-01/capitulo2.html
www.mupe.org/elect/prod.html.
122
Anexos
A
Esquemas de simulación
A Esquemas de simulación
A Esquemas de simulación
A continuación se expondrán los esquemas de simulación utilizados en los
diferentes apartados
125
A Esquemas de simulación
126
Emulación de una turbina con control V/F.
W_Nominal_T urbina
0
w_tur
P
0
Reductora
Constant
5
ref
pitch
v iento (m/s)
Constant3
Tem
63
v elocidad (rpm)
1/n_rpm
Par_resis
ref
man_sat
Paso a rad/seg
sal
Par_eol
comparacion par
Sine Wave1
Turbina eólica +
T ransmisión mecánica
(referida al ej e del generador)
Display3
Retardo1
Control PID
analógico
con antiwindup
Analog
Input
0
1500/5
Analog
Output
m ando
National Instruments
PCI-6024E [auto]
1/n_rpm
mando
wr
National Instruments
PCI-6024E [auto]
vel
vel_rpm
T o Workspace2
1/wm_base
To Workspace3
0
1/wm_base
Display1
Analog
Input
intensidad
National Instruments
PCI-6024E [auto]
0.336
1/(S_base_cc/wcc_base)
1.55e4
Par_aerogenerador
ganancia
sonda V-A
T esion_i
To Workspace
int_A
T o Workspace1
Fig. 1. Esquema de simulación empleado en el laboratorio
Figura 121. Esquema de simulación empleado en el laboratorio
w
A Esquemas de simulación
127
Control vectorial.
Lazos de corriente integrados en el lazo de velocidad
usq
isq_ref
w_ref
1
Km
1
Lr/Lm
T_base*Tm.s
Step
Transfer Fcn1
1/a
Ki
T_base*Ti.s
u(1)*u(2)
Gain1
T_base/a.s+1
Gain2
Gain3
Transfer Fcn3
Tv1
isq
Transfer Fcn2
Lm/Ksigmar
f(u)
flujo rotor
Tv2
1
T_base*J.s
w_real
Transfer Fcn
0.1
usd
8
Par_resis
isd_ref
1/Lm
1
Ki
T_base*Ti.s
V vs w
Gain5
1/a
T_base/a.s+1
Gain4
Transfer Fcn5
isd
Transfer Fcn4
flujo
Figura 122. Modelo de simulación con los lazos de corriente integrados en el de velocidad
A Esquemas de simulación
128
Control de velocidad con PWM vectorial
isdr_ref
usd
1/Lm
vsd
[w]
Control PI corriente
Gain3
V vs w
usd_ref
isd_ref
[i sdr]
w
usd
Desacoplo vsd
[i sqr]
isd_real
v sd
d
isq
[vsD]
d'
q
[flujo_ref]
[fluj o_ref]
f lujo
sen
Control PI corriente
isq_ref
[coseno]
cos
[isqr]
wr_real
[w]
usq
w
[i sdr]
isq_real
Goto10
d,q -> d',q'
Desacoplo vsq
isd
[flujo_ref]
[vsQ]
q'
usq_ref
isq_ref
Control PI velocidad
wr
[seno]
desacoplo vsd
w_ref
Step
[wr]
Goto9
d,q -> d`,q`
Goto4
v sq
f lujo
[wr]
wr
desacoplo vsq
isqr_ref
vsq
usq
[i sqr]
isq
[fl uj o_ref]
f lujo
[wr]
calculo w
[w]
w
Goto3
wr
[i sqr]
isq
[seno]
sen
[fl uj o_ref]
f lujo
[th_mec]
calculo theta
theta
teta
SIN
COS
d/2
th_mec
w
[wr]
Goto5
[coseno]
cos
Goto6
sen_X*d
w
theta
T erminator4
cos_X*d
T erminator5
Sen, Cos, Comp_teta
iSr
VSrs
[vsD]
Control Vectorial
[vsQ]
s1
s1
s2
s2
s3
s3
isdr
Un
v sD
v sQ
Inversor
T rifásico
(ideal)
v cond
sqrt(2)*U_base
VSrs
VSst
iSr
a
iSs
b
Vn
iSt
VStr
sen
[coseno]
cos
T erminator2
Motor
Wn
[seno]
iRr
VRrs Inducción
Termi nator3
inversor_Uf
0
VRst
1/(sqrt(2)*I_base)
q
Gain15
1/(sqrt(2)*I_base)
[isdr]
Goto7
[isqr]
Goto8
Gain16
a,b -> d,q
(mod. din.) iRs
Vcond
d
a,b -> d,q
(a+b+c = 0)
Termi nator
iRt
i sqr
Termi nator1
VRtr
rotor
par_mot
Tem
Carga
n_rpm
n_rpm
th_mec
[th_mec]
wr
w
1/wm_base
par_res
Gain18
Goto2
Gain1
Motor_asíncrono_(a)
0.1
par resis
M_base
par_motor
[wr]
Goto1
Carga Motora
Gai n2
wr
0
Di spl ay2
Figura 123. Esquema para el control de la velocidad con un control vectorial
A Esquemas de simulación
129
Simulación completa del aerogenerador
isdr_ref
usd
Control PI corriente usd
Gain3
V vs w
iSr
usd_ref
vsd
VSrs
isd_ref
1/Lm
w
[i sqr]
isq
[fl ujo_ref]
f lujo
Desacoplo vsd v sd
isd_real
[isdr]
[w]
d
d'
s1
s1
s2
s2
s3
s3
isdr
Un
v sD
VSrs
iSr
a
iSs
b
q
[fluj o_ref]
Goto4
Control PI corriente usq
isq_ref
[isqr]
wr_real
isq_real
[w]
w
[i sdr]
isd
[flujo_ref]
f lujo
[coseno]
v sQ
VSst
Vn
iSt
d,q -> d',q'
Motor
Wn
v cond
sqrt(2)*U_base
inversor_Uf
VRst
0
calculo w
w
[isqr]
Goto8
Gain16
par_mot
wr
w
Carga
[th_mec]
1/wm_base
[wr]
par_res
Gain18
Goto2
Gain1
f lujo
q
[isdr]
Goto7
a,b -> d,q
Terminator1
th_mec
vsq
isq
cos
Gain15
1/(sqrt(2)*I_base)
Terminator
Tem
n_rpm
n_rpm
[isqr]
[coseno]
1/(sqrt(2)*I_base)
isqr
iRt
VRtr
rotor
desacopl o vsq
[flujo_ref]
sen
Terminator3
(mod. din.) iRs
isqr_ref
Motor_asíncrono_(a)
Goto1
Carga Motora
[w]
par_mi
Goto3
wr
[wr]
Terminator2
iRr
VRrs Inducción
Vcond
usq
[seno]
d
a,b -> d,q
(a+b+c = 0)
VStr
cos
Desacoplo vsq v sq
wr
[wr]
Inversor
Tri fásico
(ideal)
sen
q'
usq_ref
isq_ref
Control PI velocidad
wr
[wr]
[seno]
desacoplo vsd
w_ref
[w_ref]
Control Vectorial
d,q -> d`,q`
0
W_Nominal_Turbina
[isqr]
0
0
pitch
v iento (m/s)
5
Constant3
Tem
v elocidad (rpm)
Display2
theta
sen
[flujo_ref]
Reductora
Constant
isq
w
w_tur
[th_mec]
63
1/n_rpm
Par_resis
1/wm_base
Paso a rad/seg
Paso a rad/seg1
f lujo
calculo theta
theta
teta
SIN
COS
d/2
th_mec
[w_ref]
Goto9
[wr]
Goto5
[coseno]
cos
Goto6
sen_X*d
w
cos_X*d
Sen, Cos, Comp_teta
Par_eol
[seno]
2.5019
Terminator4
Gain2
[w_ref]
Terminator5
w_vs
par_vs
Turbina eólica +
Transmisi ón mecánica
(referida al eje del generador)
5
Constant1
Sine Wave1
Retardo1
1.55e4
0
Display3
Display1
0
Product
v_vi ento
Ucc_exc
Ucc_exc
Ucc
Iexc
Motor DC
w
Icc
Ecc
Iexc
Par
-1
par_cc
Motor de Continua
0
Icc
Display
-1
R_carga
Figura 124. Esquema completo de la simulación de un aerogenerador
pot
A Esquemas de simulación
130
Algoritmo de estimación de la velocidad.
Gain8
Analog
Input
Analog Input
fr
entrada
salida
Analog Input1
fr
Gain7
Analog Input2
fs
VSrs
entrada
salida
Gan_sonda
fs
Vst
filtro1
f
National Instruments
PCI-6024E [auto]
Analog
Input
Vrs
filtro
National Instruments
PCI-6024E [auto]
Analog
Input
Gan_sonda
Gain6
f
VSst
entrada
salida
Gan_sonda
Ir
Frf
filtro2
National Instruments
PCI-6024E [auto]
Analog
Input
Analog Input3
Frf
iSr
entrada
salida
Gan_sonda
Is
r
filtro3
Gain3
r
National Instruments
PCI-6024E [auto]
Estimador de velocidad
iSs
Analog
Input
Analog Input4
entrada
salida
filtro4
mando
Analog
Output
Gan_sonda
Gain1
w_real
Repeating
Sequence
National Instruments
PCI-6024E [auto]
Figura 125. Esquema del algoritmo de estimación de velocidad
Analog Output
National Instruments
PCI-6024E [auto]
A Esquemas de simulación
131
Esquemas comunes.
Par_resis
2
Par_resis
Tem
V_viento
TSR
2
3
wr
dwr/dt
TSR
1/J_tur
viento (m/s)
f(u)
30/pi
1
velocidad (rpm)
Inercia del
generador
Tv
Cp(TSR,pitch)
1
s
Par_eol
3
Par_eol
1
1
1/wn_pitch^2s2 +2*seta_pitch/wn_pitchs+1
pitch
Rate Limiter
Dinámica del
actuador de pala
R_rotor
velocidad lineal
punta de pala
Fig. 2. Turbina eólica + Transmisión mecánica (referida al eje del generador)
Figura 126.
Turbina eólica + Transmisión mecánica (referida al eje del generador)
b
w2
0
antiwindup
w1
1
AND
K
1
Ti.s
[sat_man]
man_sat
1
ref
w4
>=
linmax
OR
Td.s
~tipo_dif
[sat_man]
<=
linmin
Td/N.s+1
-1
sal
2
Fig. 3. Control PID analógico con antiwindup
Figura 127. Control PID analógico con antiwindup
0
antiwindup
AND
[sat_man]
1
w_ref
1
Km
Lr/Lm
T_base*Tm.s
u(1)*u(2)
Gain1
Gain3
Transfer Fcn1
2
linmax
Tv1
>=
wr_real
OR
linmin
<=
[sat_man]
Memory
V vs w
Fig. 4. Control PI velocidad
Figura 128. Control PI velocidad
isq_ref
A Esquemas de simulación
132
0
antiwindup
1
AND
Ki
1
T_base*Ti.s
[sat_man]
usd
Gain2
Transfer Fcn3
1
linmax1
isd_ref
>=
OR
2
linmin1
[sat_man2]
Memory1
<=
isd_real
Figura 129. Control PI corriente
1
1
usd_ref
2
f(u)
w
3
1
w
3
vsd
Tv
isq
usq_ref
2
4
isd
flujo
4
f(u)
1
vsq
Tv3
flujo
5
wr
Figura 130. Desacoplo vsd, vsq
.
1
Rr*Lm/Lr
isq
2
1
w
flujo
Divide2
Gain10
3
wr
Figura 131. Cálculo w
1
Rr*Lm/Lr
isq
2
flujo
Divide2
Gain10
w_red
Gain12
1
s
rem
T ransfer Fcn6
Math
Function
rem
2*pi
Vcond3
3
P
th_mec
Gain13
Figura 132. Cálculo theta
2*pi
Vcond4
Math
Function1
1
theta
A Esquemas de simulación
1
133
usD
vsD
PWM
Vectorial
usQ
(Lim. Hex.)
2
vsQ
1
ts i
Vc
Vcond5
t's+sec
Gen.
Pulsos
s1
1
s2
s1
2
s3
s2
3
Gen_conmutación
s3
PWM_Vectorial_lh
Figura 133. Control vectorial
1/z
Unit Delay2
1
entrada
1/z
Unit Delay
max
Constant
min
Constant1
1
salida
>=
Switch
Relational
Operator
<=
OR
Logical
Operator
Relational
Operator1
Figura 134. Filtro
B
Código
B Código
135
B Código
% DATOS PARA LA INICIALIZACIÓN DE TODOS LOS MODELOS
% Motor de inducción MI (aprox. G4 del lab) pu
V_red =220;
% (V). Tensión eficaz de línea.
I_nom = 26;
% (A). I nominal del motor.
f_red = 50;
% (HZ). Frecuencia eléctrica nominal.
Rs = 0.039;
% Resistencia de estator
Rr = 0.063;
% Resistencia de rotor
Lm = 1.81;
% Inductancia mutua
L_dis = 0.1;
% Inductancia de dispersión
Ls = Lm + L_dis;
Lr = Lm + L_dis;
Ksigmar = L_dis/Lm + 1;
P = 2;
% pares de polos
% Máquina de continua DC pu
Rcc = 0.05;
Lcc = 0.01;
Ucc_nom = 220;
Icc_nom = 18;
% (V). Tension nominal de inducido.
% (A). Intensidad nominal de inducido.
wcc_nom = 1500;
% (rpm). Velocidad mecanica nominal del motor de continua.
Icc_exc_nom = 0.78; % (A). Intensidad nominal de excitacion
Ucc_exc_nom = 220; % (V). Tension nominal de excitacion.
Lcc_exc = 0.2803;
Iexc_nom*Lcc_exc;
% (H). Inductancia mutua de excitacion: Flujo_nom =
B Código
136
Ucc_exc = Ucc_exc_nom; % (V). Tension de alimentacion del motor de continua.
Rcc_exc = Ucc_exc_nom/Icc_exc_nom; % (ohm). Resistencia de excitacion.
% Carga en pu
Jm = 4.39;
% Inercia en s
Bm = 0.169;
% Rozamiento viscoso en pu.
% PROGRAMA
% MI
p_ind = P;
% pares de polos para el modelo dinámico
w_red = 2*pi*f_red;
n_rpm = 60/(2*pi); % Cte para pasar de rd/s a rpm: w (rpm) = n_rpm*w(rd/s)
% Bases
U_base = V_red/sqrt(3);
I_base = I_nom;
Z_base = U_base/I_base;
M_base = 3*U_base*I_base*p_ind/w_red;
L_base = Z_base/w_red;
J_base = 3*U_base*I_base*p_ind^2/(w_red^2);
we_base = w_red;
% w electrica base
wm_base = w_red/p_ind;
% w mecanica base
T_base = 1/we_base;
Flujo_base = U_base/w_red;
Lm_ind = Lm*L_base;
Ls_ind = (Lm+L_dis)*L_base;
Lr_ind = Ls_ind;
B Código
Rs_ind = Rs*Z_base;
Rr_ind = Rr*Z_base;
Jm_din = Jm*J_base;
Bm_din = Bm*J_base;
% Motor DC
% Bases
S_base_cc = Ucc_nom*Icc_nom;
wcc_base = wcc_nom*2*pi/60;
M_base_cc = S_base_cc/wcc_base;
Rcc_base = Ucc_nom/Icc_nom;
Lcc_base = Rcc_base/wcc_base;
Rcc_exc_base = Ucc_exc_nom/Icc_exc_nom;
Lcc_exc_base = Rcc_exc_base/wcc_base;
J_base_cc = S_base_cc/wcc_base^2;
R_carga = 20; %Ucc_nom/Icc_nom; % (ohm). Resistencia de carga.
Iexco = Ucc_exc/Rcc_exc;
Jm_din_cc = Jm*J_base_cc;
Bm_din_cc = Bm*J_base_cc;
% TURBINA EOLICA Y SISTEMA DE TRANSMISION
% Parametros aerodinámicos
D_rotor=60; % Diametro de la turbina (m)
R_rotor=D_rotor/2; % Radio del rotor (m)
ro=1.2; % Densidad del aire ro (kg/m3)
% COEFICIENTE DE POTENCIA Cp
137
B Código
138
% El coeficiente de potencia Cp se lee de un fichero Cp.txt
% Primera fila: valores del angulo de pitch en [º] en el eje de pala
% Primera columna: valores de Tip Speed Ratio (TSR)
% Asi, el elemento de la fila i-esima, en la columna j-esima, es el valor de Cp para
% un angulo de pala igual al valor j-esimo de la primera fila, y un TSR igual al valor
% i-esimo de la primera columna. El primer valor de todos (primera fila y primera
columna) contiene
% un cero.
load Cp.txt
% velocidad nominal del viento (m/s)
v_nom=11;
% velocidad minima del viento (velocidad de conexion) (m/s)
v_min=5;
% Calculo de la velocidad de rotacion nominal de la turbina
% La potencia mecanica nominal es la potencia maxima para la velocidad del viento
nominal (depende de TSR)
Pm_aux=1/2*Cp(2:end,2).*ro*pi*R_rotor^2*v_nom^3;
[Pm_nom,aux_2]=max(Pm_aux);
TSR_nom=Cp(aux_2+1,1);
Cp_nom=Cp(aux_2+1,2);
n1_nom=TSR_nom*v_nom/R_rotor*60/2/pi;
% maxima velocidad de rotacion (rpm)
n_max=n1_nom; % la maxima velocidad corresponde a la velocidad nominal
% minima velocidad de rotacion (rpm)
n_min=TSR_nom*v_min/R_rotor*60/2/pi;
% Velocidad inicial de rotacion (rad/s)
wr_0=(n_max+n_min)/2*pi/30;
B Código
139
% Parametros del sistema mecanico
J_tur=3.5e4;
% Inercia de la turbina y del generador en Kg.m^2
% DATOS DEL ACTUADOR DE PALA
% Limite de velocidad en el actuador en [º]/s
lim_vel_pitch=5;
% Pulsacion natural del actuador (rad/s)
wn_pitch=10;
% Amortiguamiento del actuador
seta_pitch=1;
%Periodo de muestreo
ts=1/6000;
%Control PI
sigma = 1 - (Lm^2)/(Lr*Ls);
seta = 0.7;
%Control PI corrientes
a = 0.4905;
% Valor interno de la planta
tai = 0.0005/T_base;
wni = 3.29/tai;
% Tiempo de alcance
% Frecuencia natural
Ti = 2 * seta / wni - a / (wni^2);
Ki = 2 * seta * wni - a;
%Control PI velocidad
J = 4.39/T_base;
% Inercia
B Código
140
B = 0.169;
% Rozamiento viscoso
tam = (J/(B*10));
% Tiempo de alcance
wnm = 3.29/tam;
% Frecuencia natural
Km = J * 2 * seta * wnm - B;
Tm = Km/J/wnm^2;
%Inicialización del diagrama tensión vs w
x = [-1.5:0.0001:-1 1:0.0001:1.5];
xaux = [1.5:-0.0001:1 1:0.0001:1.5];
y = ones(size(x))./xaux;
% Ejemplo del cálculo de vds y vqs a partir de un punto de trabajo conocido
m = 30/M_base;
flujo = 1;
wr = 80/wm_base;
iqs = flujo*m;
ids = flujo/Lm;
ws = Rr*Lm/Lr*iqs/flujo;
w = ws + wr;
vds
=
(1/(sigma*Ls)*(Rs+(Rr*Lm*Lm)/(Lr*Lr))*ids-w*iqsLm*Rr/(sigma*Ls*Lr*Lr))*sigma*Ls;
vqs
=
(1/(sigma*Ls)*(Rs+(Rr*Lm*Lm)/(Lr*Lr))*iqs+w*ids+Lm*wr/(sigma*Ls*Lr))*sigma*
Ls;
f_test = [0.02,0.1,(0.2:0.2:1)];
siempre en 1
V_f = 1;
% Frecuencias a las que se hace el análisis. Acabar
% relación V/f en pu
V_boost = Rs; % factor boost en tanto por uno de la Vnom a w = 0
Par_res = 0.5; % Par resistente en pu para simu dinámica
B Código
t_simu = 6;
141
% tiempo de simulación dinámica
Ref_n= [0.001 0;2.54 1;4 1;5 0.5;t_simu 0.5];
análisis dinámico. Colum1 = t(s); Colum2 = n(pu)
% Referencia de velocidad para
% Datos para el PWM
V_cond = V_red*sqrt(2);
% (V). Tension del condensador de alimentacion al
inversor (supone rectificador trifasico perfecto)
% nota: cuando m = vr/v_tri = 1, la tension de salida Uuv es maxima pero no igual a
V_red sino Uuv=V_red*0.866
v_tri = 1;
% (pu). Tension de pico de la onda triangular portadora del PWM
f_tri = 1e3;
% (Hz). Frecuencia de la onda triangular portadora del PWM
% Limitaciones para la saturación de los PI
linmax=3;
linmin=-3;
linmax1=3;
linmin1=-3;
linmax2=3;
linmin2=-3;
C
Glosario
C Glosario
143
C Glosario
V_viento
Βpitch
Velocidad del viento
Ángulo de ataque a los álabes
A
Área barrida por el viento
ρ
Densidad del aire seco
Cp
Coeficiente de potencia
(s)
Variable de Laplace
P
Número de pares de polos
ω
Velocidad de rotación eléctrica
ωr
Velocidad de rotación mecánica
ωs
Velocidad de deslizamiento
Tem
λ
Par electrmagnético
Flujo magnético
Rr
Resistencia de rotor
Rs
Resistencia de estator
Lσr
Inductancia de dispersión del rotor
Lσs
Inductancia de dispersión del estator
Lm
Inductancia mutua
λrd
Flujo en eje d de rotor
λsd
Flujo en eje d de estator
λrq
Flujo en eje q de rotor
C Glosario
144
λsq
Flujo en eje q de estator
Vrd
Tensión en eje d de rotor
Vsd
Tensión en eje d de estator
Vrq
Tensión en eje q de rotor
Vsq
Tensión en eje q de estator
isd
Corriente en eje d de estator
isq
Corriente en eje q de estator
tai
Tiempo de alcance de la intensidad
wni
Frecuencia natural del lazo de intensidad
tam
Tiempo de alcance de la velocidad
wnm
J
B
Vc
Frecuencia natural del lazo de velocidad
Inercia del sistema
Rozamiento viscoso del sistema
Tensión del condensador
C Glosario
145
 0
0
Anuncio
Documentos relacionados


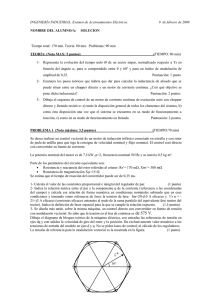

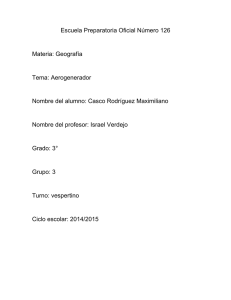

Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados