5.2 Dinámica del movimiento de batimiento. Efecto de la posición de
Anuncio

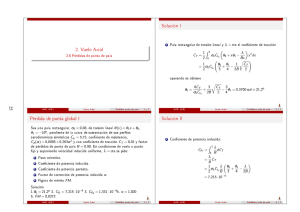
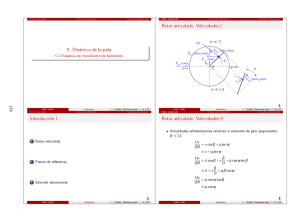
Velocidades I dFb 5. Dinámica de la pala 5.2 Dinámica del movimiento de batimiento. Efecto de la posición de la articulación de batimiento P z ¯ e bR B dFc dFI z Plano de referencia r El movimiento de la pala consiste en una rotación alrededor de la articulación de batimiento caracterizada por el ángulo β . 147 AAD (HE) Dinámica eb ∕= 0. Dinámica pala 1 / 11 AAD (HE) eb ∕= 0. Dinámica pala 3 / 11 Velocidades II Introducción En general, la articulación de batimiento suele separarse del eje de rotación. Esto se traduce en general en las siguientes consecuencias: representa un diseño mecánico más simple, Se añade un modo ηb (x ) para caracterizar el movimiento fuera del plano, z , de forma que z = ηb (x )β (t )R . La ventaja de añadir este modo es que la formulación puede ser fácilmente adaptada a modos de exión más complejos. Para el caso particular que se va a considerar de rotación de sólido rígido el modo ηb (x ) se expresa como ⎧ ⎨ (x − eb ) ηb (x ) = 1 − eb ⎩ la frecuencia natural de la dinámica de batimiento aumenta con respecto a Dinámica Ω proporcionando mejores características de manejo del rotor, 0 existe un momento de batimiento que es transmitido al eje de rotación. x > eb x < eb donde la forma del modo se ha normalizado para que ηb (1) = 1. La velocidad en la dirección perpendicular a la pala, UP , se expresa adimensionalmente (considerando ángulos pequeños) Los valores habituales de posición de la articulación de batimiento suelen ser del orden de 3 % al 5 % del radio del rotor. UP ż dz β̇ ≈λ+ + µ cos ψ ≈ λ + ηb + µ cos ψηb′ β ΩR ΩR dr Ω AAD (HE) Dinámica eb ∕= 0. Dinámica pala 2 / 11 AAD (HE) Dinámica eb ∕= 0. Dinámica pala 4 / 11 Equilibrio de momentos I Equilibrio de momentos III donde: dFb fuerza aerodinámica: dFb ≈ dL dFc fuerza centrífuga dFc = m r Ω2 dr dFI fuerza de inercia: dFI = m z̈dr = m (ηb R )β̈ dr M̄b = d F̄b = Se desprecian los efectos de la gravedad y de la velocidad radial. Equilibrio de momentos con respecto la articulación de batimiento, ∑ MB = 0 ∫ R eb R ∫ R 148 eb ∕= 0. Dinámica Dinámica pala 5 / 11 Equilibrio de momentos II ∫ R 1 − eb eb R (ηb R )r m dr = ∫ R eb R (ηb R )2 m dr + Reb R (η R )m dr 1 − eb eb R b ∫ se obtiene: + (∫ R 2 ) (ηb R ) m dr β̈ + eb R ) ∫ R ∫ Reb R 2 (ηb R ) m dr + (ηb R )m dr Ω2 β = (ηb R )dFb 1 − eb eb R eb R eb R (∫ R resultando nalmente: AAD (HE) ηb d F̄b dFb ρ (ΩR )2 cR ∫R eb R eb R (ηb R )m dr νb = 1 + ∫ 1 − eb eR R (ηb R )2 m dr 2 b νb2 = 1 + ∫1 eb eb ηb m dx ∫ 1 − eb e1 ηb2 m dx b AAD (HE) eb ∕= 0. Dinámica Dinámica pala 7 / 11 Equilibrio de momentos IV Debido a la expresión de ηb , se cumple que: 1 eb y νb es la frecuencia propia adimensional de batimiento: ∫ R (ηb R )(r − eb R )m β̈ dr + (ηb R )r m Ω2 β dr − (r − eb R )dFb = 0 eb R eb R (∫ R ) (∫ R ) 2 (1 − eb ) (ηb R ) m dr β̈ + (ηb R )r m dr Ω2 β = eb R eb R ∫ R =R (x − eb )dFb eb R AAD (HE) ∫ 1 β ′′ + νb2 β = γ M̄b Dinámica El primer término, 1, representa la frecuencia propia debida a la rigidez centrífuga mientras que el segundo es el efecto de la posición de la articulación de batimiento. Por tanto separar la articulación de batimiento consigue aumentar la frecuencia propia del sistema dinámico con respecto la frecuencia propia de un rotor articulado. En general la frecuencia propia se suele expresar también como: νb2 = 1 + donde mb es la masa de la pala, rc la posición radial ∫del centro de masas de la pala con respecto a la articulación, Ib = eRb R (ηb R )2 m dr es el momento de inercia con respecto a la articulación. Caso particular de masa uniforme: νb2 = 1 + eb ∕= 0. Dinámica pala 6 / 11 mb rc Ib AAD (HE) Dinámica 3 eb 2 1 − eb eb ∕= 0. Dinámica pala 8 / 11 Equilibrio de momentos V Solución estacionaria I Dado que el valor de la posición de la articulación de batimiento puede ser entre 4 % a 5 %, la frecuencia propia del rotor es ligeramente superior a la velocidad de rotación (νb ∼ 1,02 − 1,04). Por tanto, el desfase entre la acción exterior y la respuesta del sistema es ligeramente inferior a 90º. Momento aerodinámico M̄b = ∫ 1 ηb ( e 2 ) ( ) θ (x + µ sin ψ)2 − λ + ηb β ′ + ηb′ µβ cos ψ (x + µ sin ψ) dx Desarrollando estos términos: M̄b = Mθc θc + Mθ1 θ1 + Mλ λ + Mβ β + Mβ ′ β ′ 149 AAD (HE) eb ∕= 0. Dinámica Dinámica pala 9 / 11 Equilibrio de momentos VI Desarrollando los términos se obtiene: 1 1 1 8 3 4 Mθc = c2 + c1 µ sin ψ + c0 µ 2 sin2 ψ Mθ1 = 1 10 1 1 4 6 c3 + c2 µ sin ψ + c1 µ 2 sin2 ψ 1 1 6 4 Mλ = − c1 − c0 µ sin ψ 1 1 Mβ = − f1 µ cos ψ − f0 µ 2 cos ψ sin ψ 6 4 1 1 8 6 Mβ ′ = − d1 − d0 µ sin ψ donde los siguientes coecientes modican la solución c0 = 1 − eb ; c1 = 1 − (eb + eb2 )/2; c2 = 1 − (eb + eb2 + eb3 )/3 c3 = 1 − (eb + eb2 + eb3 + eb4 )/4, d0 = 1 − eb ; d1 = 1 − (2e + eb2 )/3 f0 = 1; f1 = eb /2 AAD (HE) Dinámica eb ∕= 0. Dinámica pala 10 / 11 La solución estacionaria es de la forma f1 (β0 , β1c , θ0 ) = 0 f2 (β0 , β1s , β1c , θ1c ) = 0 f3 (β1s , β1c , θ0 , θ1s ) = 0 Las expresiones detalladas se pueden encontrar en Johnson pg. 232 La mayor diferencia que aparece respecto del caso articulado consiste en el acoplamiento entre el control lateral y longitudinal. AAD (HE) Dinámica eb ∕= 0. Dinámica pala 11 / 11