Caracterización de Pulsos de Luz Láser Ultracortos
Anuncio

Universitat Politècnica de Catalunya
Escola Tècnica Superior d'Enginyeria de Telecomunicació de Barcelona
Caracterización de Pulsos de Luz Láser Ultracortos
Eduardo Pérez González
Proyecto Final de Carrera dirigido por
Pablo Loza Álvarez
Dedicado a mis padres,
Isabel y Ángel
Gracias al 'Institut de Ciències Fotòniques' y a la 'UPC'. Gracias a Pablo
Loza, David Artigas, Iván Amat, Iain Cormack, Lluís Torner, Basilio Florentino,
Felip Palou, David García, David Guillamet, Víctor Moreno, Joaquina García y
Antonio González. Un agradecimiento especial para Verónica, a mis hermanos
Maria y Xavi y a mis padres.
Caracterización de Pulsos de Luz Láser Ultracortos
Índice
Introducción
1. Aplicaciones de los pulsos ultracortos............................................. 5
2. Motivación del proyecto y objetivos planteados.............................. 6
3. Estructura del proyecto.......................................................................7
4. Referencias.......................................................................................... 8
Capítulo 1 – Pulsos ultracortos
1.1 El pulso ultracorto............................................................................. 9
1.1.1 Pulsos con chirp.................................................................... 12
1.1.2 Pulsos limitados por Transformada de Fourier...................... 15
1.1.3 Dispersión del material.......................................................... 16
1.2 Generación de segundo armónico..................................................20
1.3 El láser de pulsos ultracortos.......................................................... 23
1.3.1 El efecto Kerr óptico.............................................................. 24
1.3.2 Modelocking...........................................................................26
1.3.3 Self-modelocking................................................................... 29
1.3.4 El láser de Titanio-zafiro........................................................ 30
1.4 Conclusiones..................................................................................... 34
1.5 Referencias........................................................................................ 35
Capítulo 2 – La técnica de autocorrelación
2.1 Respuesta no lineal.......................................................................... 36
2.1.1 Absorción de dos fotones...................................................... 37
2.1.2 Generación de segundo armónico.........................................39
2.2 El autocorrelador colineal................................................................ 41
2.2.1 Autocorrelación de intensidad............................................... 45
2.2.2 Autocorrelación interferométrica............................................ 49
2.2.3 Resultados experimentales................................................... 51
2.3 El autocorrelador no-colineal........................................................... 56
2.4 Conclusiones..................................................................................... 60
2.5 Referencias........................................................................................ 61
3
Caracterización de Pulsos de Luz Láser Ultracortos
Capítulo 3 – Frequency-resolved optical gating (FROG)
3.1 La técnica de frequency-resolved optical gating........................... 62
3.1.1 Teoría de SHG-FROG........................................................... 65
3.1.2 Consideraciones experimentales...........................................67
3.1.3 El algoritmo para SHG-FROG............................................... 68
3.1.4 Resultados experimentales................................................... 70
3.2 La técnica de X-FROG..................................................................... 79
3.3 Conclusiones..................................................................................... 83
3.4 Referencias........................................................................................ 84
Capítulo 4 – Medida y automatización
4.1 Instrumentos de laboratorio............................................................. 85
4.1.1 La mesa traslacional.............................................................. 86
4.1.2 El amplificador de lock-in....................................................... 88
4.1.3 El espectrómetro....................................................................91
4.1.4 La cámara CCD..................................................................... 94
4.2 Control de los instrumentos............................................................. 96
4.2.1 Movimiento de la mesa traslacional.......................................97
4.2.2 Medidas con el osciloscopio.................................................. 100
4.2.3 Medidas con el amplificador de lock-in.................................. 101
4.2.4 Control del espectrómetro..................................................... 102
4.3 Captura de datos............................................................................... 103
4.3.1 Obtener una autocorrelación................................................. 104
4.3.2 Obtener un espectro.............................................................. 106
4.3.3 Obtener una traza FROG...................................................... 108
4.4 Conclusiones..................................................................................... 112
4.5 Referencias........................................................................................ 113
Capítulo 5 – Conclusiones y trabajo futuro
5.1 Conclusiones..................................................................................... 114
5.2 Trabajo futuro.................................................................................... 116
5.3 Referencias........................................................................................ 118
Apéndice – Algoritmo para SHG-FROG............................................... 119
4
Caracterización de Pulsos de Luz Láser Ultracortos
INTRODUCCIÓN
El pulso ultracorto es un pulso de luz láser con una duración
extremadamente corta. De hecho, su duración es tan pequeña que no existe
ningún otro fenómeno generado por el ser humano que lo supere. Con el fin de
caracterizar los pulsos ultracortos a la salida de un láser es necesario utilizar
métodos de medida indirectos. Está claro que si con un simple osciloscopio
-también fabricado por el hombre- pudiéramos medirlos directamente, entonces
significaría que los pulsos no son realmente tan cortos. Disponer de una
herramienta que permita conocer las características de dichos pulsos es
fundamental en cualquier laboratorio de pulsos ultracortos y el tema principal
de este proyecto.
1. Aplicaciones de los Pulsos Ultracortos
Los pulsos ultracortos tienen una duración menor que muchos procesos
atómicos y moleculares. Algunos de estos procesos ocurren en tiempos del
orden de picosegundos y femtosegundos, permitiendo así su estudio con
dichos pulsos. Por ejemplo, los láseres de pulsos ultracortos han sido utilizados
para estudiar el conjunto de procesos que da lugar a la fotosíntesis.
Las técnicas convencionales para tomar imágenes en bio-medicina
también se han mejorado utilizando sistemas basados en pulsos ultracortos. En
microscopía no lineal la alta intensidad de los pulsos hace posible que
procesos de absorción de dos o más fotones sean significativos.1 En tal caso
se pueden emplear fotones menos energéticos, por ejemplo en el infrarrojo,
que penetran más en el tejido y son menos dañinos para las células. Además
como la fluorescencia se localiza únicamente en el foco del haz se pueden
tomar imágenes en tres dimensiones y con una mejor resolución.
5
Introducción
Caracterización de Pulsos de Luz Láser Ultracortos
En la técnica de Fluorescence Life-time Imaging (FLIM) el análisis de la
fluorescencia de una muestra excitada por un pulso ultracorto permite
diferenciar entre el tejido sano y el cancerígeno.2
En el ámbito de las comunicaciones ópticas el gran ancho de banda de
las fibras permitiría combinar la técnica de transmisión OTDM (Optical TimeDivision Multiplexing) con la de WDM (Wavelength-Division Multiplexing).3
La alta intensidad de los pulsos también los hace ideales para ablacionar
y modelar materiales con una precisión de hasta 1 µm. Si los pulsos son
demasiado largos, la región de interacción (enfoque) se verá fuertemente
afectada debido a la conducción del calor. Para evitar precisamente esto se
utilizan pulsos de duración ultracorta.4
Otra aplicación es la que hace referencia a una técnica conocida como
Chirped Pulse Amplification (CPA), en la que un único pulso es amplificado y, al
ser enfocado, puede generar intensidades del orden de 1020 W/cm², con las
que se ha conseguido la fusión nuclear en un laboratorio.5
Pero no sólo la intensidad y duración de los pulsos es importante en la
interacción de la luz con la materia sino también la cantidad de chirp. Por
ejemplo, se ha demostrado que es posible seleccionar el estado cuántico de
una molécula utilizando pulsos con chirp positivo, o bien negativo.6 De aquí la
necesidad de conocer exactamente tanto la intensidad temporal y espectral
como la fase del pulso.
2. Motivación del Proyecto y Objetivos Planteados
La mayor parte de las aplicaciones que acabamos de ver requieren
trabajar con pulsos tan cortos como sea posible. En tal caso, es lógico pensar
que una de las principales prioridades en cualquier laboratorio de pulsos
ultracortos es conocer la duración de los pulsos a la salida del láser
6
Introducción
Caracterización de Pulsos de Luz Láser Ultracortos
correspondiente. Cuando dicha duración es óptima (la más corta posible) la
fase depende linealmente del tiempo. Así, resulta especialmente útil, no sólo en
aquellas aplicaciones que de por sí lo requieren, disponer de un sistema que
permita conocer tanto la forma de los pulsos (perfil de intensidad) como su
fase. El objetivo principal de este proyecto es, precisamente, poner en marcha
un sistema que permita la caracterización completa (módulo y fase) de un pulso
ultracorto arbitrario. También es objetivo del proyecto la automatización de
dicho sistema para que el proceso de obtención de medidas resulte lo más
simple posible.
3. Estructura del Proyecto
Este proyecto está compuesto de cinco capítulos más un apéndice. El
primero de ellos sirve para entrar con más detalle en las características de un
pulso ultracorto, la técnica de generación y el láser de pulsos ultracortos que se
utilizó en el laboratorio. En el segundo capítulo se presenta la primera de las
dos técnicas (Autocorrelación) que se utilizaron en el laboratorio, con el objetivo
de caracterizar dichos pulsos. La técnica de FROG es la segunda técnica
utilizada y a la cual está dedicada por completo el tercer capítulo. En el capítulo
cuarto se detalla el proceso de automatización que se llevó a cabo para que
ambos sistemas funcionaran de forma totalmente automatizada. En el quinto
capítulo ("Conclusiones y trabajo futuro") se destacan los resultados más
significativos del proyecto y se sugieren algunas direcciones hacia las que
podría continuar el trabajo en el futuro. Finalmente, encontramos un apéndice
del algoritmo que se utilizó en la técnica de FROG (ver cap. 3).
7
Introducción
Caracterización de Pulsos de Luz Láser Ultracortos
4. Referencias
1. W. Denk, J. H. Strickler, and W. W. Webb, “2-photon laser scanning fluorescence
microscopy”, Science 248, 73 – 76 (1990).
2. R. Jones, K. Dowling, M. J. Cole, and D. Parsons-Karavassilis, “Fluorescence lifetime
imaging using a diode-pumped all-solid-state laser system”, Electron. Lett. 35, 256
(1999).
3. W. H. Knox, “Ultrafast technology in telecommunications”, IEEE J. Quantum Electron. 6,
1273 – 1278 (2000).
4. H. K. Tonshoff, C. Momma, A. Ostendorf, S. Nolte, and G. Kamlage, “Microdrilling of
metals with ultrashort laser pulses”, J. Laser Appl. 12, 23 – 27 (2000).
5. K. W. D. Ledingham, I. Spencer, T. McCanny, R. P. Singhal, M. I. K. Santala, E. Clark,
I. Watts, F. N. Beg, M. Zepf, Krushelnick, M. Tatarakis, A. E. Dangor, P. A. Norreys, R.
Allot, D. Neely, R. J. Clark, A. C. Machacek, J. S. Wark, A. J. Cresswell, D. C. W.
Sanderson, and J. Magill, “Photonuclear physics when a multiterawatt laser pulse
interacts with solid targets”, Physical Review Lett. 84, 899 – 902 (2000).
6. B. Kohler, V. V. Yakovlev, J. W. Che, J. L. Krause, M. Messina, K. R. Wilson, N.
Schwentner, R. M. Whitnell, and Y. J. Yan, “Quantum control of wave-packed evolution
with tailored femtosecond pulses”, Physical Review Lett. 74, 3360 – 3363 (1995).
8
Introducción
Caracterización de Pulsos de Luz Láser Ultracortos
CAPÍTULO 1
PULSOS ULTRACORTOS
Antes de ver las técnicas utilizadas en el laboratorio para caracterizar
pulsos ultracortos es necesario que conozcamos qué es exactamente un pulso
ultracorto. Ese es precisamente el objetivo de este capítulo, en el que además
hablaremos de las características que los hace tan singulares y del método
para generarlos. Se introducirán los conceptos de pulso con chirp, pulso
Limitado por Transformada de Fourier y dispersión del material. También
analizaremos el proceso de generación de segundo armónico, utilizado tanto
por nuestro sistema láser de pulsos ultracortos, como en los capítulos 2 y 3. La
última sección hace referencia a la técnica self-modelocking con la que se
generan los pulsos ultracortos. Veremos los dos efectos no lineales que utiliza,
self-focusing y self-phase modulation, el caso más general de la técnica
(modelocking) y finalmente, el sistema láser concreto que se utilizó en el
laboratorio.
1.1 El Pulso Ultracorto
A diferencia de lo que ocurre en el funcionamiento usual de un láser,
donde se tiene una onda continua de luz casi monocromática, los láseres de
pulsos ultracortos generan una secuencia de pulsos con un ancho de banda
asociado de algunos nanómetros. Esto significa un ancho de banda enorme,
teniendo en cuenta que estamos tratando con frecuencias ópticas. Por ejemplo,
para un ancho de banda ∆λ de 2 nm centrado a λc = 400 nm (luz azul)
estaríamos hablando de 3.75 THz (1 Terahercio = 1012 Hz). Si además
suponemos que la frecuencia de repetición de los pulsos es de 100 MHz (108
9
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
pulsos por segundo) y que la duración de cada uno de ellos es de tan solo 100
fs (1 femtosegundo = 10-15 segundos), entonces la potencia pico de cada pulso
será del orden de cien mil veces la potencia media a la salida del láser. En tal
caso, para una potencia media típica de 1 W tendremos pulsos cuya potencia
pico se moverá alrededor de 105 W.
El objetivo de este proyecto es precisamente la caracterización de los
pulsos ultracortos a la salida de uno de estos láseres. En concreto, de un láser
de Titanio-Zafiro del tipo Self-Modelocking, con una frecuencia de repetición de
76 MHz y una duración de los pulsos alrededor de los 150 fs (ver sección
1.3.4). Pero antes de intentar medir dichos pulsos es necesario que
conozcamos algún aspecto más acerca de sus características y de cómo se
generan.
El campo eléctrico asociado a un pulso ultracorto se puede expresar
matemáticamente como
E (t ) = E0 (t ) e jφ ( t ) e jω 0 t ,
(1.1)
donde E0(t) representa la envolvente del campo eléctrico, φ(t) la variación de
fase a lo largo del pulso y ω0 la frecuencia portadora. La envolvente de los
pulsos con los que vamos a trabajar a lo largo de este proyecto se puede
aproximar por la función secante hiperbólica1, resultando
E0 (t ) = E0 sech (at ) ,
(1.2)
donde E0 es la amplitud real del campo eléctrico y el parámetro a está
relacionado con la duración del pulso τp, según el criterio de Full Width at Half
Maximum (FWHM), por
τp ≈
1.76
.
a
10
(1.3)
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
En otras palabras, τp se obtiene midiendo la anchura total del pulso, a la
mitad del máximo de su perfil de intensidad. La forma o perfil de intensidad del
pulso se obtiene directamente a partir de
2
I (t ) ∝ E0 (t ) = E02 sech 2 ( at ) .
(1.4)
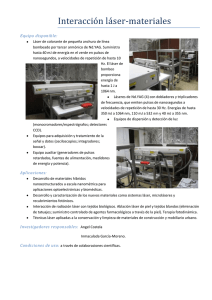
En adelante nos referiremos a este tipo de pulsos como sech²(t). La
figura 1 muestra un ejemplo de uno estos pulsos con una duración de 150 fs,
comparado con el perfil de intensidad de un pulso gaussiano de la misma
duración.
Intensidad Normalizada (u.a)
1,0
0,8
0,6
0,4
0,2
0,0
-450
-300
-150
0
150
300
450
Tiempo (fs)
Figura 1. Perfil de intensidad de un pulso sech²(t)
de 150 fs (línea continua), comparado con el de un
pulso gaussiano de la misma duración (línea
discontinua).
Existen dos razones que justifican dicha comparación. Por una parte,
esto nos permite apreciar el gran parecido entre los dos tipos de pulso, aunque
el motivo principal se debe a que, por lo general, el análisis matemático cuando
se trabaja con pulsos gaussianos es más sencillo. En este sentido, el desarrollo
que veremos a continuación para tratar los conceptos de pulso con chirp, pulso
11
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
Limitado por Transformada de Fourier (LTF) y dispersión del material se realiza
para el caso particular de pulsos gaussianos.
1.1.1 Pulsos con Chirp
En un pulso sin chirp la frecuencia instantánea es una constante a lo
largo del tiempo, de valor igual a la frecuencia portadora del pulso ω0. Un pulso
con chirp se define como aquel pulso cuya frecuencia instantánea cambia a lo
largo del tiempo (ver fig. 2). Para entender mejor el concepto de chirp
procedamos a calcular la frecuencia instantánea del siguiente pulso
E (t ) = e − at e j (ω 0t + bt
2
2
)
,
(1.5)
donde el parámetro b está relacionado con el chirp del pulso. En este caso, la
fase tiene un término que varía de forma cuadrática con el tiempo. La fase total
del pulso viene dado por
φtot (t ) = ω0t + bt 2 .
(1.6)
Entonces, a partir de la definición de frecuencia instantánea,
ω i (t ) ≡
dφ tot (t )
dt
,
(1.7)
obtenemos que
ω i (t ) ≡
d
(ω 0t + bt 2 ) = ω 0 + 2bt
dt
12
.
(1.8)
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
Como se puede apreciar, una variación cuadrática de la fase debida al
término bt² ha supuesto una variación lineal de la frecuencia instantánea de la
forma 2bt. Por lo general b será el parámetro para medir la cantidad de chirp.
En este caso (ec. 1.8) se trata de chirp lineal aunque es posible extender
el término a chirp cuadrático ó cúbico para variaciones cuadráticas ó cúbicas
de la frecuencia instantánea.
Cuando el término b es igual a cero la expresión matemática que
describe el pulso resulta ser
2
E (t ) = e − at e jω 0 t .
(1.9)
Si calculamos su frecuencia instantánea en radianes por segundo,
también a partir de la definición (ec. 1.7), se obtiene que
ω i (t ) ≡
d
(ω 0t ) = ω 0 ,
dt
(1.10)
de donde vemos que la frecuencia instantánea es constante a lo largo del
tiempo e igual a la frecuencia portadora ω0. En este caso se habla de que el
pulso (ec. 1.9) no tiene chirp.
Analicemos un último caso para variaciones lineales de fase como la del
siguiente pulso
E (t ) = e − at e j (ω 0 t + bt ) .
2
13
(1.11)
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
Su frecuencia instantánea es
ω i (t ) ≡
d
(ω 0t + bt ) = ω 0 + b
dt
(1.12)
De inmediato nos damos cuenta de que sólo se produce un
desplazamiento en frecuencia, pero que en ningún caso la frecuencia
instantánea depende del tiempo. En consecuencia un pulso con una variación
lineal de fase tampoco tiene chirp.
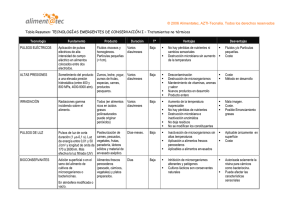
Finalmente en la figura 2 vemos lo que podría ser la representación de
un pulso gaussiano de 150 fs con chirp lineal positivo.
1,0
0,5
0,0
-0,5
-1,0
-300
-150
0
150
300
Tiempo (fs)
Figura 2. Pulso gaussiano con chirp lineal positivo.
La duración del pulso medida sobre su intensidad
es de 150 fs. Los valores de la frecuencia ω0 y del
parámetro b se eligieron para poder apreciar la
variación de la frecuencia instantánea.
En este caso la frecuencia instantánea aumenta linealmente respecto ω0
para valores positivos del tiempo, debido a que b es un valor positivo.
14
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
1.1.2 Pulsos Limitados por Transformada de Fourier
Un pulso Limitado por Transformada de Fourier (LTF) es aquel cuyo
producto duración por ancho de banda es mínimo. En otras palabras, un pulso
LTF será aquel que, con un ancho de banda y un perfil de intensidad
determinados tenga la menor duración posible.
Para analizarlo tomemos el pulso gaussiano
2
E (t ) = e − at e j (ω 0 t + bt
2
)
,
(1.13)
cuya Transformada de Fourier es directamente otro pulso gaussiano y donde el
término bt² en la fase representa el caso particular de un pulso con chirp.
Entonces se puede llegar a que la duración del pulso τp según el criterio de Full
Width at Half Maximum (FWHM) es
τp =
2 ln 2
.
a
(1.14)
Téngase en cuenta que esta duración se mide sobre I(t) ∝ E(t)².
Análogamente en el dominio frecuencial podemos calcular el ancho de banda
del pulso. Primero calculando la Transformada de Fourier de E(t) y después
tomando su módulo al cuadrado. El ancho de banda ∆fp de la densidad
espectral de potencia del pulso, siguiendo el mismo criterio de FWHM, resulta
ser
∆f p =
2 ln 2
π
a [1 + (b / a ) ]
2
(1.15)
Dado que en 1.14 la duración del pulso τp no depende de b, minimizar
τp∆fp es equivalente a minimizar ∆fp. Esto ocurre cuando b = 0 y el pulso no
tiene chirp. En ese caso, en el que se aprovecha al máximo el ancho de banda,
15
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
hablaremos de pulsos LTF. A la práctica, como el ancho de banda es limitado,
un pulso con chirp siempre tendrá una duración mayor que otro LTF con el
mismo ancho de banda y perfil de intensidad.
A partir de 1.14 y 1.15 se puede calcular el producto duración del pulso
por ancho de banda como
2 ln 2
2
2
∆f pτ p =
× 1 + (b / a ) ≈ 0.44 × 1 + (b / a) ,
π
(1.16)
de donde vemos que el mínimo valor de τp∆fp para un pulso gaussiano según el
criterio de FWHM es 0.44 (b = 0). En el caso más general posible este producto
dependerá del criterio para medir ∆fp y τp, de la forma exacta del pulso y de su
fase. Diremos que un pulso es LTF en sentido amplio cuando su producto
duración por ancho de banda (τp∆fp) sea ≈ 0.5.2 De algún modo esta será una
medida de la calidad de los pulsos. Si lo que pretendemos es que τp sea lo
menor posible será necesario trabajar con pulsos LTF ó como mínimo cercanos
a ser LTF.
El perfil de intensidad de los pulsos que vamos a caracterizar no es
exactamente gaussiano, sino que se aproxima mejor a la forma sech²(t). Un
dato que consultaremos habitualmente en el laboratorio es el producto duración
por ancho de banda teórico de un pulso LTF y que para el caso de pulsos
sech²(t) es τp∆fp = 0.315.
1.1.3 Dispersión del Material
En un medio dispersivo la constante de propagación β(ω) se puede
desarrollar en serie de potencias como
16
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
1
β (ω ) = β (ω 0 ) + β ' × (ω − ω 0 ) + β '' × (ω − ω 0 ) 2 + K
2
(1.17)
Si ω0 es la frecuencia central en radianes por segundo de una señal pulsada,
entonces los términos β, β’ y β’’, de la serie de potencias de β(ω), son
responsables de la velocidad de fase vφ(ω0), de la velocidad de grupo vg(ω0) y
de la dispersión de la velocidad de grupo respectivamente. La relación con
cada uno de los términos de la serie es la siguiente:
β ≡ β (ω ) ω =ω =
0
dβ
β ≡
dω
=
'
ω =ω 0
d 2β
β ≡
dω 2
''
ω =ω 0
ω0
ω0
≡
vφ (ω 0 ) velocidad de fase
1
1
≡
v g (ω 0 ) velocidad de grupo
(1.18)
dispersión de la
d 1
≡
=
dω v g (ω ) velocidad de grupo
La envolvente del pulso viajará a una velocidad vg evaluada a la
frecuencia central ω0, mientras que las oscilaciones de la luz dentro del pulso
se moverán hacia delante a una velocidad de fase vφ. La forma del pulso
también cambiará debido a la dispersión de la velocidad de grupo β’’ o
dispersión del material. En tal caso la velocidad de grupo será una función de la
frecuencia o longitud de onda.
Tomemos de nuevo el pulso gaussiano con chirp de la ecuación 1.5. El
parámetro gaussiano inicial que lo define inequívocamente es2
17
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
Γ0 = a0 − jb0 .
(1.19)
Después de propagarse por un medio dispersivo una distancia z el pulso
que tendremos será
E ( z,ω ) = E0 (ω ) × e − jβ (ω ) z ,
(1.20)
y dependerá del pulso inicial E0(t), la constante de propagación β(ω) y la
distancia recorrida z. Así mismo se puede establecer que el parámetro
gaussiano del nuevo pulso, el cual define inequívocamente su forma, duración
y cantidad de chirp, satisface la relación
1
1
= + 2 jβ ' ' z .
Γ( z ) Γ0
(1.21)
Para un pulso Limitado por Transformada de Fourier el parámetro b,
inicialmente igual a cero, crecerá o decrecerá monótonamente al propagarse
por un medio dispersivo, por lo que se ensanchará independientemente del
signo de β’’. En cambio cuando el pulso tiene chirp (b≠0) es posible disminuir su
duración si el signo de la dispersión y la distancia recorrida son los adecuados.
La relación que se debe cumplir para reducir al mínimo la duración de un pulso
con un parámetro inicial Γ0 es
(2 β '' z ) opt = −
b0
a02 + b02
,
(1.22)
de donde comprobamos que cuando b0 = 0 (pulso LTF) la distancia óptima de
propagación también debe de ser igual a cero. Si en cambio, y como sucede
habitualmente después de propagarse por un medio dispersivo, el pulso tiene
chirp positivo, la parte derecha de la ecuación 1.22 será un valor negativo. Para
18
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
que la relación se pueda cumplir necesitaremos un sistema con dispersión
negativa (β’’ < 0) y que además, permita ajustar el valor de β’’ y/o la distancia de
propagación z.
La secuencia formada por un par de prismas de la figura 3 es un sistema
muy utilizado para compensar la dispersión en los láseres de pulsos
ultracortos.3 El primer prisma dispersa angularmente el haz, para que distintas
longitudes de onda del pulso recorran distintos caminos ópticos, con el fin de
recomprimir la envolvente temporal del pulso. Al incrementar la distancia L
entre los dos prismas aumenta la dispersión negativa del sistema, lo que
permite compensar la dispersión positiva, o dispersión normal, que introduce el
medio láser. Una vez ajustada la distancia L se puede realizar un ajuste fino de
la dispersión actuando sobre la inserción de los prismas en el haz. Introducir
más un prisma aumenta la dispersión positiva, mientras que el hecho de
retirarlo la estará disminuyendo. Los valores concretos de L y de la inserción de
cada prisma dependerán, en cualquier caso, de la geometría de los prismas,
así como de las propiedades físicas del material del que estén hechos
(dispersión angular y β’’).
M
II
I
L
M’
Figura 3. Secuencia de prismas con dispersión negativa.
En esta configuración el haz debe pasar dos veces por cada prisma por
lo que M-M’ puede ser un espejo ó bien el eje de simetría para repetir la
secuencia de prismas. La dispersión angular de un prisma, menor que la de
una rejilla de difracción, permite pequeñas correcciones de la dispersión de la
velocidad de grupo. A cambio, las pérdidas que introduce el sistema son mucho
19
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
menores que las de un par de rejillas de difracción. Este arreglo de prismas es
el responsable del ajuste de la dispersión en muchos de los láseres de pulsos
ultracortos (ver sección 1.3.4).
En la siguiente sección, que además sirve como introducción a la óptica
no lineal, se describe el proceso de generación de segundo armónico, utilizado
tanto por el láser de bombeo de nuestro láser de pulsos ultracortos, como en
las técnicas que veremos en los capítulos 2 y 3 para caracterizar dichos pulsos.
1.2 Generación de Segundo Armónico
Cuando la luz que incide en un material es suficientemente intensa se
comienzan a manifestar una serie de fenómenos no lineales, en el sentido de
que la respuesta óptica del material deja de depender linealmente con el
campo eléctrico aplicado. En tal caso la Polarización Eléctrica que se induce en
el material es
P(t ) = χ1 E (t ) + χ 2 E 2 (t ) + χ 3 E 3 (t ) + L
(1.23)
donde χ2 es la susceptibilidad no lineal de segundo orden, χ3 la de tercer orden
y así sucesivamente. La respuesta no lineal del material es evidente cuando
algún término χi, a partir de i = 2, es distinto de cero y la amplitud del campo
eléctrico incidente es suficientemente grande como para hacerlo evidente.
La susceptibilidad de segundo orden χ2 es responsable del proceso de
generación de segundo armónico (SHG), en el que la intensidad de la luz de
segundo armónico generada aumenta cuadráticamente con la intensidad
incidente del haz fundamental. La figura 4 muestra la geometría básica del
proceso de generación de segundo armónico.
20
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
ν
ν
χ2
2ν
Figura 4. Diagrama de bloques del proceso de
generación de segundo armónico (SHG).
La figura 5 es un esquema de lo que sucedería a nivel energético, donde
dos fotones de energía hν se funden en el medio para dar lugar a un fotón de
energía 2hν. En el capítulo 2 veremos un ejemplo concreto de generación de
segundo armónico, mediante el uso de un cristal no lineal (el coeficiente χ2 es
muy grande) excitado con un láser de pulsos ultracortos (altas intensidades).
hν
2hν
hν
Figura 5.Diagrama de los niveles energéticos
que describen el proceso de SHG.
Bajo ciertas condiciones el proceso de SHG puede ser muy eficiente,
llegando a convertir gran parte de la potencia de fundamental a segundo
armónico. Por ejemplo el láser de Nd:YVO4 (Nd:Vanadate) que veremos más
adelante (sección 1.3.4) utiliza un cristal de generación de segundo armónico
para convertir la longitud de onda de 1064 nm, en el infrarrojo cercano, a 532
nm en el espectro visible, con una eficiencia del 25%.
21
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
En realidad la eficiencia del proceso de SHG depende altamente de la
fase relativa entre las ondas que interactúan en el cristal. Dicho proceso puede
entenderse como la suma de dos fotones, y como tal, tiene que conservar tanto
la energía como el momento. La conservación de la energía da lugar a hν3 =
hν1 + hν2. Teniendo en cuenta que para SHG ν1 = ν2 es la frecuencia de las dos
ondas de fundamental que inciden en el cristal y ν3 la del segundo armónico, la
relación que resulta es hν3 = 2hν1. Por otra parte, la conservación del momento
implica que k3 = k1 + k2, lo que se conoce también como condición de phasematching. Cuando las dos ondas de fundamental tienen ambas la misma
polarización (phase-matching de Tipo I), entonces k1 = k2 y la condición de
phase-matching se puede escribir como k3 = 2k1. Dicha relación es equivalente
a n(ν) = n(2ν), y que en principio no es posible conseguir teniendo en cuenta
que en un material con dispersión normal el índice de refracción crece
monótonamente con la frecuencia. Sin embargo, podemos hacer uso de la
birrefringencia que muestran muchos cristales4, es decir, de la dependencia del
índice de refracción con la dirección de propagación y/o polarización del haz
incidente, para que n(ν) sea igual, o prácticamente igual, a n(2ν). En tal caso, la
onda de segundo armónico se polariza siempre en la dirección que da un
índice de refracción menor, para que la birrefringencia del material pueda
compensar la dispersión. El phase-matching de Tipo II se da cuando las ondas
de fundamental tienen distinta polarización, una ordinaria y la otra
extraordinaria.
Más adelante, en el segundo capítulo, se describirá el uso de un cristal
de BBO (Beta-Barium Borate) para generar el segundo armónico de dos haces
de luz fundamental que interfieren en el cristal. En este caso el BBO es un
cristal uniaxial negativo, por lo que el segundo armónico corresponde a
polarización extraordinaria.
A la práctica existen dos métodos para conseguir que la condición de
phase-matching se cumpla.5 En primer lugar, el ángulo del cristal θ con
respecto a la dirección de propagación de los rayos incidentes permite un
ajuste fino del phase-matching. Siguiendo en el caso de un cristal uniaxial
22
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
negativo como el BBO, la luz polarizada perpendicularmente al plano que
contiene el vector de propagación k y el eje óptico del cristal experimenta un
índice de refracción ordinario no. En cambio la luz polarizada en el mismo plano
que contiene k y el eje óptico del cristal experimenta un índice de refracción
extraordinario ne, que depende del ángulo θ entre el eje óptico y k. Ajustando el
ángulo del cristal es posible entonces obtener la condición de phase-matching.
El segundo método para obtener phase-matching es el que utiliza el
láser de Nd:YVO4 (Nd:Vanadate) con un cristal SHG de LBO (Lithium
Triborate), en el que la birrefringencia del cristal es una función de la
temperatura. Entonces es posible fijar el ángulo θ entre k y el eje óptico del
cristal a 90º, mientras ajustamos la condición de phase-matching variando la
temperatura. En el caso del láser de Nd:Vanadate el cristal de LBO se calienta
a 148ºC para la que la generación de segundo armónico a 532 nm sea
máxima. Esta técnica presenta una ventaja respecto a la anterior,
especialmente cuando se quiere convertir gran cantidad de potencia. Si el
ángulo θ es distinto de 0 ó 90º, como ocurre en el primer método, los rayos
ordinario y extraordinario con vectores de propagación paralelos divergirán el
uno del otro a medida que se propaguen por el cristal. Este efecto, que en
principio limita el solapamiento espacial de las dos ondas y reduce la eficiencia
del proceso, no afecta al método de la temperatura porque θ = 90º.
1.3 El Láser de Pulsos Ultracortos
Para que el láser del laboratorio (ver sección 1.3.4) funcione en modo
pulsado, en vez de producir la típica onda continua de luz casi monocromática,
se utiliza una técnica conocida como modelocking. Antes de introducir esta
técnica y de entrar en detalle en el funcionamiento del láser es necesario hablar
de dos efectos no lineales importantes para la generación de pulsos ultracortos,
ambos derivados del efecto Kerr óptico.
23
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
1.3.1 El Efecto Kerr Óptico
La susceptibilidad de tercer orden χ3 que aparece en la ecuación 1.23 es
responsable de una serie de efectos no lineales de tercer orden, entre ellos el
de generación de tercer armónico (THG) y el efecto Kerr óptico. Este último es
el que da lugar a dos fenómenos muy interesantes en el contexto de la
generación de pulsos ultracortos: Self-Focusing y Self-Phase Modulation
(SPM).6
Cuando se tienen altas intensidades en un medio, el índice de refracción
dependerá de una parte lineal y de otra no-lineal según
n(t ) = n0 + n 2 I ⋅ I (t ) ,
(1.24)
donde n2I es el coeficiente Kerr, y que depende únicamente de las propiedades
del material como
n2 I =
6χ 3
8ε 0cn0 ,
(1.25)
donde n0 es el índice de refracción lineal, χ3 la susceptibilidad dieléctrica de
tercer orden del material, ε0 la constante de permisividad dieléctrica y c la
velocidad de la luz en el vacío. En tal caso el índice de refracción en un medio
láser cambiará en función de la intensidad del pulso que se propaga.
Asumiendo que n2I es un valor positivo, la parte central del haz experimentará
un índice de refracción mayor que en los extremos, donde la intensidad es
menor. El resultado es que el haz tenderá a enfocarse en la dirección
transversal a medida que se propaga por el material. Este es el primero de los
efectos interesantes que hemos presentado como Self-Focusing.
Si además asumimos que el efecto Kerr óptico es instantáneo, el índice
de refracción cambiará a su vez con el perfil de intensidad del pulso, siendo
24
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
máximo en la parte central de éste. La variación del camino óptico ∆n(t)L da
lugar a un cambio de fase de
∆φ (t ) =
2π L n2 I I (t )
λ
,
(1.26)
y que a su vez da lugar a ensanchamiento espectral del pulso. Esto es lo que
se conoce como Self-Phase Modulation (SPM). El incremento de la frecuencia
instantánea que resulta de SPM se puede escribir como
∆ω (t ) = −
2π L n2 I dI (t )
λ dt .
(1.27)
En la figura 6 se muestra la representación gráfica de ∆ω(t) y ∆φ(t) para
un pulso gaussiano de 150 fs.
Fase (u.a)
1,0
0,5
0,5
0,0
0,0
-0,5
-0,5
-450
-300
-150
0
150
300
Frecuencia Instantánea (u.a)
Fase
Frec. Inst.
1,0
450
Tiempo relativo al centro del pulso (fs)
Figura 6. Variación de la fase (línea continua) y de la frecuencia
instantánea (línea discontinua) debida a SPM, para un pulso
gaussiano de 150 fs. Las unidades de la fase y la frecuencia
instantánea son arbitrarias, y dependen del índice de refracción no
lineal, de la longitud de onda central del pulso y de la longitud del
material.
25
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
Para compensar aproximadamente la SPM deberemos tratarla como un
efecto dispersivo equivalente a chirp lineal positivo en la posición central del
pulso.
1.3.2 Modelocking
Modelocking es la técnica más utilizada hoy en día para generar pulsos
ultracortos en un láser. En principio la fase entre los modos que pueden oscilar
en una cavidad láser es totalmente aleatoria. La condición de resonancia
L=
nλ
2 ,
(1.28)
así como el ancho de banda de emisión del medio láser determinan qué modos
pueden propagarse. Para que todos ellos estén en fase es necesario introducir
algún tipo de modulación. En tal caso tendremos un pulso E(t) formado por N
modos según
E (t ) =
∑ exp[ j(ω
N /2
0
n = −N / 2
+ n ∆ω t )] ,
(1.29)
donde ω0 es la pulsación central y ∆ω la separación entre modos. Además para
simplificar los cálculos hemos supuesto que la ganancia es igual en todo el
ancho de banda de emisión. En ese caso podemos escribir E(t) como un
sumatorio de cosenos en la forma
N /2
E (t ) = exp( jω 0t ) 1 + 2 ∑ cos(n ∆ω t ) .
n =1
(1.30)
Tomando su módulo llegamos a una expresión final de E(t) como
26
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
( N + 1) ∆ω t
sen
N /2
2
E (t ) = 1 + 2 ∑ cos(n ∆ω t ) =
n =1
∆ω t
sen
2
(1.31)
La altura del pulso resultante es proporcional a N mientras que su
anchura es proporcional a N-1, llegando a la conclusión de que cuanto mayor
sea el ancho de banda, tendremos más modos y en consecuencia, los pulsos
serán más cortos.
Dentro de la cavidad se tiene un solo pulso que, en cada pasada o
round-trip, transmite parte de la potencia al exterior. A la salida tendremos un
tren de pulsos cuyo tiempo de separación viene determinado por
∆tsep =
2nL
c ,
(1.32)
donde nL es la longitud efectiva de la cavidad. En efecto este es el tiempo que
el pulso tarda en recorrer la cavidad en ambos sentidos.
Modelocking Activo
Si la modulación que fuerza el funcionamiento pulsado se introduce por
medio de una fuente externa hablaremos de modelocking activo. La frecuencia
de la modulación deberá ser un múltiplo de la frecuencia de repetición de los
pulsos de modo que, cada vez que el pulso pase por el modulador, la ganancia
o transmisión del dispositivo sea máxima. Los métodos y/o dispositivos que se
utilizan a la práctica son básicamente la modulación de la ganancia, el bombeo
síncrono y los moduladores acústico y electro-ópticos.
27
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
Modelocking Pasivo
Si por el contrario el elemento que introduce la modulación es un
dispositivo pasivo hablaremos de modelocking pasivo. Esta técnica es más
efectiva y permite obtener pulsos más cortos que en modelocking activo.
Utilizando un elemento no lineal con unas pérdidas que dependan de la
intensidad conseguiremos que las componentes más intensas del campo
eléctrico experimenten mayor ganancia neta y se vean favorecidas sobre el
modo continuo.
Un absorbedor saturable introduce unas pérdidas selectivas que
suprimen las componentes de baja intensidad o de continua del campo
eléctrico, mientras que para las componentes de mayor intensidad se satura y
las pérdidas son mucho menores. Podemos distinguir entre dos tipos de
dispositivo según se comporte como absorbedor saturable lento o rápido.7 En
el primer caso el absorbedor sólo atenúa la parte frontal del pulso. A partir de
cierta intensidad el absorbedor se satura y como el tiempo de recuperación es
grande, el resto del pulso se transmite prácticamente igual. Hace falta un
mecanismo adicional para atenuar la amplitud de la cola del pulso. Si la
ganancia del medio láser se satura con la llegada de la parte delantera del
pulso, entonces la parte trasera verá una ganancia mucho menor (o nula) y no
será amplificada. De este modo se obtienen pulsos de duración menor que el
tiempo de recuperación del absorbedor saturable.
El funcionamiento con absorbedores saturables rápidos es más sencillo.
En este caso el absorbedor atenúa tanto la parte delantera como la parte
trasera del pulso. Como la ganancia del medio no se satura la duración final de
los pulsos será, en el mejor de los casos, igual al tiempo de recuperación del
absorbedor. Si lo que queremos son pulsos muy cortos será preciso que el
tiempo de recuperación del absorbedor sea igualmente corto.
28
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
1.3.3 Self-Modelocking
Veamos ahora el mecanismo por el cual nuestro láser funciona en modo
pulsado. En primer lugar hemos visto que en el medio se produce una
modulación espacial del perfil de intensidad transversal del haz debida al efecto
Kerr. Ajustando la cavidad correctamente el haz sufrirá más ganancia cuanto
mayor sea el Self-Focusing, favoreciendo así las componentes de ruido más
intensas. Con Self-Focusing aseguramos que el haz pulsado queda adentro del
haz de bombeo. Después de algunas pasadas un pico de ruido será más
intenso y descargará más el medio que los demás. También se enfocará más y
experimentará mayor ganancia. Finalmente se convertirá en un pulso ultracorto
cuya duración final dependerá del ancho de banda y de la dispersión total
dentro de la cavidad.
Self-Phase Modulation (SPM) es otro efecto fundamental en SelfModelocking.8 Al aumentar el ancho de banda hace posible que pulsos más
cortos puedan oscilar en la cavidad, mientras que un par de prismas aportan la
dispersión negativa necesaria para compensar la dispersión introducida por el
material y la SPM. En nuestro caso, aunque es correcto asumir que la SPM
aumenta el ancho de banda de los pulsos, el principal promotor del largo ancho
de banda es que el espectro de emisión es muy grande (ver figura 7).
Si añadimos una apertura circular mordiendo el haz en su periferia
eliminaremos las componentes de baja intensidad (la continua), favoreciendo
así el modo pulsado. La ajustaremos de modo que el haz enfocado, de
diámetro menor que el de continua, pase por la ranura.
Self-Focusing y SPM son los dos fenómenos que dan nombre a SelfModelocking. Podemos incluir esta técnica de generación de pulsos ultracortos
dentro de modelocking pasivo y a su vez dentro de absorbedores saturables
rápidos. Utilizar un efecto no lineal instantáneo para modular en amplitud es
equivalente utilizar un absorbedor saturable rápido, en este caso un absorbedor
saturable virtual.
29
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
1.3.4 El Láser de Titanio-Zafiro
En lo que sigue describiremos el láser de Ti:Zafiro que se utilizó en el
laboratorio (Mira Optima 900-F, Coherent)9 y el láser de bombeo (Verdi-V10),
basado en un láser de Nd:YVO4 (Nd:Vanadate). El láser de Ti:Zafiro es un láser
del tipo Self-Modelocking sintonizable entre 700 y 980 nm y con una frecuencia
de repetición de los pulsos es de 76 MHz. En cuanto al láser de bombeo, se
trata de un láser de Nd:YVO4 (Nd:Vanadate), doblado en frecuencia a partir de
un cristal SHG de LBO (Lithium Triborate). La potencia a su salida es de 10 W
a una longitud de onda de 532 nm. Esta configuración permite obtener a la
salida del láser de Ti:Zafiro hasta 1,8 W en modo pulsado y 2,3 W en modo
continuo. Ajustando la inserción de un par de prismas es posible minimizar la
dispersión total de la cavidad para obtener los pulsos más cortos (ver sección
1.2.3). Según el fabricante el láser es capaz de emitir pulsos con una duración
de hasta 130 fs. El objetivo del proyecto es precisamente la caracterización de
dichos pulsos.
El ión Ti+3 incluido en un cristal de Zafiro (Al2O3) forman el medio activo
del láser de Titanio-Zafiro (Ti:Al2O3).10 La cantidad de iones de titanio es de
alrededor del 0,1% y se encuentran remplazando a átomos de aluminio en el
cristal. El láser de Ti:Zafiro tiene el rango de sintonizabilidad más amplio de los
láseres conocidos hoy en día, con longitudes de onda posibles entre 670 y
1100 nm. También son muy eficientes con un rendimiento cuántico de hasta el
80% a temperatura ambiente. Los picos del espectro de absorción están cerca
de 500 nm y pueden operar de forma continua o pulsada. En la figura 7 se
muestran los espectros de absorción y de emisión del láser de Ti:Zafiro.
30
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
Figura 7. Espectros de absorción y de emisión del láser
de Titanio-Zafiro.
La figura 8 muestra el diagrama de la cavidad del láser de Ti-Zafiro que
se utilizó en el laboratorio.
Figura 8. Diagrama de la cavidad del láser de Titanio-Zafiro utilizado en el laboratorio.
El haz de bombeo entra por la izquierda y se enfoca con una lente (L),
pasa por un espejo cóncavo (M4) y de ahí al cristal de Ti:Zafiro. La
fluorescencia emitida es colectada por el espejo cóncavo M5, y dirigida hacia el
31
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
prisma P1, el espejo M6, el prisma P2, el espejo M7 y regresa por el mismo
camino hasta el cristal. Finalmente se refleja en los espejos M4 y M3, pasa por
el filtro birrefringente (BF), se refleja en M2, pasa entre la apertura (SLIT), y una
parte de la potencia se transmite al exterior por el acoplador de salida OC
(Output Coupler). Los espejos M8 y M9 forman una cavidad auxiliar cuya
función es facilitar la alineación de la cavidad principal.
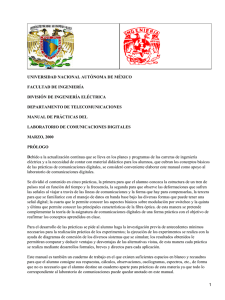
Como parte del trabajo del proyecto, se procedió a medir el rango de
sintonización del láser de Ti:Zafiro. Para ello se utilizó un Analizador de
Espectros Láser de la marca IST. En la figura 9 se muestra la relación entre la
longitud de onda central de los pulsos y la posición del filtro birrefringente
(indicada por un tornillo micrométrico) que permite sintonizar el láser. La línea
continua corresponde a medidas experimentales mientras que la discontinua es
la que especifica el fabricante. Como se puede ver las dos son prácticamente
iguales. Esta grafica resulta de mucha utilidad pues nos permite conocer la
longitud de onda de trabajo sin necesidad de utilizar el analizador de espectros
(Laser Spectrum Analizer), simplemente consultando la posición del tornillo
550
550
540
540
530
530
520
520
510
510
500
500
760
780
800
820
840
860
Micrometer Settings (in)
Micrometer Settings (in)
micrométrico.
880
Wavelength (nm)
Figura 9. Relación entre la longitud de onda central de los pulsos y
la posición del filtro birrefringente medido por su tornillo
micrométrico, según las especificaciones (línea discontinua) y
medida experimentalmente (línea continua).
32
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
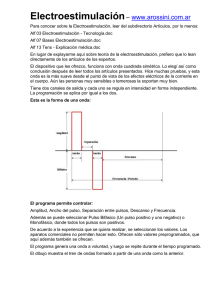
Así mismo, se procedió a medir la potencia máxima del láser en función
de la longitud de onda. La figura 10 muestra el resultado así como la
comparación con las especificaciones.
Observamos que sólo para las longitudes de onda de 760, 770 y 800 nm
se han obtenido potencias iguales o superiores a las especificadas. Esto se
debe a que durante el proceso de maximización se actuó sobre la posición de
los espejos y únicamente para las longitudes de onda más cortas se corrigió la
posición de los prismas, que inicialmente estaba ajustada para 800 nm.
Micrometer Settings (in)
2,0
500
505
510
515
520
525
530
535
540
545
Intensidad (W)
1,8
1,6
1,4
1,2
1,0
765
780
795
810
825
840
855
870
Longitud de Onda (nm)
Figura 10. Relación entre la longitud de onda central de los
pulsos y la potencia máxima en modo pulsado, según las
especificaciones (línea discontinua) y medida experimentalmente
(línea con círculos).
En general, las medidas experimentales se ajustan bastante bien a las
especificaciones del fabricante. La relación obtenida experimentalmente, entre
la posición del tornillo micrométrico que controla el filtro birrefringente y la
longitud de onda de emisión del láser es prácticamente idéntica a la facilitada
por el fabricante. Respecto a la potencia máxima en función de la longitud de
onda, en algunos casos no se alcanzan los niveles especificados, aunque con
un mejor ajuste de los espejos del láser y del par de prismas deberíamos de
33
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
aproximarnos más a dichos niveles. En ambos aspectos los resultados
obtenidos han sido bastante satisfactorios.
1.4 Conclusiones
En este capítulo se ha introducido el concepto de pulso ultracorto,
hemos visto que su forma es la de una sech², las unidades más apropiadas
para dar su duración (fs), ancho de banda (THz) y frecuencia de repetición
(MHz), y también su gran intensidad pico. Todas estas características que los
hace tan especiales pueden ser aprovechadas por un gran número de distintas
aplicaciones (ver introducción), entre las que podríamos destacar la
microscopía no lineal, debido al creciente interés que está generando
actualmente.
Por otra parte, se explicó el proceso de generación de segundo
armónico y los dos métodos básicos para conseguir la condición de phasematching, cambiando el ángulo del cristal y ajustando la temperatura. Vimos
que el láser de bombeo de nuestro láser de pulsos ultracortos utiliza este último
sistema para conseguir una eficiencia de conversión del 25%.
En la última sección se explicó la técnica de generación de pulsos
ultracortos (self-modelocking) y vimos que podíamos incluirla dentro de los
láseres
modelocking
pasivos
con
absorbedor
saturable
rápido,
más
concretamente con absorbedor saturable rápido virtual. También vimos la
modulación de amplitud que tiene lugar en el medio láser, debida a selffocusing, que hace posible el funcionamiento pulsado, y que aunque la SPM
aumenta el ancho de banda, el principal promotor del largo ancho de banda y
por tanto, de pulsos más cortos, es el gran espectro de emisión del medio
activo (Ti:Zafiro). Por último, se explicaron las características del láser de
pulsos ultracortos utilizado en el laboratorio, así como las del láser de bombeo,
y comparamos algunas de las especificaciones con medidas obtenidas
experimentalmente. El resultado de estas comparaciones, referentes a la
34
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
potencia máxima en función de la longitud de onda, y a la longitud de onda en
función de la posición del filtro birrefringente, fueron bastante satisfactorios.
Más adelante haremos un análisis más exhaustivo de los parámetros del
láser. En particular, estaremos interesados en conocer con exactitud la forma
(perfil de intensidad) y la fase de los pulsos. Así, las técnicas de
autocorrelación
y
Frequency-Resolved
Optical
Gating
(FROG)
serán
introducidas. En los capítulos siguientes de describirán estas técnicas, así
como los diferentes procesos de automatización para realizarlos en el
laboratorio de manera rutinaria.
1.5 Referencias
1. H. A. Haus, J. G. Fujimoto, and E. P. Ippen, "Structures for additive pulse modelocking",
J. Opt. Soc. Am. B 8, 2068 – 2076 (1991).
2. A. E. Siegman, Lasers (University Science Books, 1986), Chap. 9.
3. R. L. Fork, O. E. Martinez, and J. P. Gordon, “Negative dispersion using pairs of
prisms”, Opt. Lett. 9, 150 – 152 (1984).
4. E. Hecht, Optics (Addison – Wesley Pub. Co., 3rd ed. 1997), Chap. 8.
5. R. W. Boyd, Nonlinear optics (Academic Press, 1991), Chap 1.
6. A. E. Siegman, Lasers (University Science Books, 1986), Chap. 10.
7. A. E. Siegman, Lasers (University Science Books, 1986), Chap. 28.
8. D. E. Spence, P. N. Kean, and W. Sibbett, “60-femtosecond pulse generation from a
self-modelocked Ti:sapphire laser”, Opt. Lett. 16, 42 – 44 (1991).
9. Coherent, Inc., Mira 900, in Modelocked
http://www.coherent.com/Downloads/Mira900_DS.pdf
Ti:sapphire
lasers
(2002),
10. R. Arieli, The laser adventure (Kansas State University, Phys. Edu. Group), Chap. 6,
http://web.phys.ksu.edu/vqm/laserweb
35
Pulsos Ultracortos
Caracterización de Pulsos de Luz Láser Ultracortos
CAPÍTULO 2
LA TÉCNICA DE AUTOCORRELACIÓN
En este capítulo se presenta la técnica de autocorrelación, con el
objetivo de caracterizar los pulsos ultracortos del láser de Titanio-Zafiro que se
utilizó en el laboratorio (ver sección 1.3.4). Se comenzará describiendo los dos
tipos de dispositivo no lineal que se utilizaron para implementar el
autocorrelador, un fotodiodo de Arseniuro de Galio y Fósforo (GaAsP), y un
cristal de generación de segundo armónico (SHG). A continuación se introduce
en sí la autocorrelación a partir de su definición matemática, se muestran los
dos tipos de autocorrelación que podemos encontrar (de intensidad e
interferométrica) y cómo obtener una u otra. Después se describe físicamente
el primer autocorrelador que se implementó (colineal), se explica cómo estimar
la duración de los pulsos a partir de las medidas experimentales y se muestran
los resultados obtenidos. Finalmente veremos otro tipo de autocorrelador que
se implementó, utilizando una geometría no-colineal, y describiremos sus
ventajes e inconvenientes respecto al primero.
2.1 Respuesta No Lineal
La autocorrelación es uno de los métodos más básicos para medir
pulsos ultracortos. En esta técnica el pulso E(t) y una réplica del mismo
retardado un tiempo t = τ se mezclan en un elemento no lineal.1 Si el elemento
no lineal es un cristal de generación de segundo armónico, bastará con poner
un fotodetector trabajando en su zona lineal para detectar la señal generada.
En caso de que el detector que utilicemos tenga un comportamiento de
36
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
absorción de dos fotones, el mismo detector por sí solo será suficiente
aportando, además de la funcionalidad de detector, la de elemento no lineal.
En el laboratorio se trabajó en primer lugar con un fotodiodo de arseniuro
de galio y fósforo (GaAsP) funcionando como dispositivo no lineal y a su vez
como detector. Más tarde se utilizó el mismo detector, como elemento lineal,
junto con un cristal de generación de segundo armónico (SHG). Los dos
sistemas de detección son equivalentes.
2.1.1 Absorción de Dos Fotones
Los dispositivos semiconductores pueden proporcionar la respuesta
cuadrática que necesita un autocorrelador cuando trabajan como absorbedores
de dos fotones. En la figura 1 se muestra el proceso que tiene lugar a nivel
energético. Un primer fotón de energía hν es el encargado de excitar electrones
de la banda de valencia a un nivel virtual de energía. El segundo fotón, también
de energía hν, termina por llevar el electrón excitado a la banda de conducción.
La respuesta resultante del semiconductor es una fotocorriente que depende
cuadráticamente de la intensidad óptica incidente.
ν
ν
Figura 1. Proceso de absorción de dos fotones.
37
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
En el laboratorio se trabajó con un fotodiodo de arseniuro de galio y
fósforo (GaAsP) a una longitud de onda alrededor de 800nm. Un fotón a dicha
longitud de onda no es lo suficientemente energético como para excitar
electrones de la banda de valencia a la banda de conducción del GaAsP. Sin
embargo, si la intensidad de la luz es muy grande, lo cual se consigue en
régimen pulsado, entonces es posible excitar electrones de la banda de
valencia a la banda de conducción mediante la absorción de dos fotones (700 –
1400 nm).2 Con el fin de comprobar la respuesta del fotodiodo de GaAsP a
800nm se midió la fotocorriente generada para distintos valores de la potencia
incidente. En la figura 2 se muestran los resultados.
500
Fotocorriente (nA)
400
300
200
100
0
0
50
100
150
200
Potencia Promedio Relativa (u.a)
Figura 2. Relación entre potencia incidente y fotocorriente
generada por el fotodiodo de GaAsP a 800nm. Entre el medidor
de potencia y el fotodiodo se colocaron varios filtros para atenuar
la señal, por lo que la potencia que aparece representada es una
medida relativa de la potencia que realmente incide sobre el
detector.
En la siguiente figura se ha escogido una escala con ejes logarítmicos
para mostrar dichos resultados. Una recta de pendiente m = 2 trazada sobre los
puntos de la figura 3 demuestra el comportamiento cuadrático del fotodiodo.
38
Capítulo 2: La Técnica de Autocorrelación
Fotocorriente (nA)
Caracterización de Pulsos de Luz Láser Ultracortos
100
10
100
Potencia Promedio Relativa (u.a)
Figura 3. Relación entre potencia incidente y fotocorriente
generada por el fotodiodo de GaAsP a 800nm en escala
logarítmica. La recta de pendiente igual a 2 pone de manifiesto
la respuesta cuadrática del detector.
2.1.2 Generación de Segundo Armónico
La generación de segundo armónico (SHG) es un efecto no lineal que
únicamente se manifiesta en materiales no centro-simétricos. En un cristal de
estas características la susceptibilidad dieléctrica de segundo orden χ2 tendrá
un valor distinto de cero y será responsable de un conjunto de efectos no
lineales, entre ellos el de generación de segundo armónico (ver cap. 1). En
nuestro caso se utilizó un cristal de BBO (Beta-Barium Borate) diseñado para
convertir luz de 800 a 400nm, por lo que los pulsos tenían que estar centrados
alrededor de 800 nm. El grosor del cristal era de 300 µm y su coeficiente no
lineal de 2 pmV-1.
Cuando el haz fundamental incide en el cristal de SHG, dos fotones a
800nm se combinarán en dicho cristal para dar lugar a otro de 400nm. El
detector de GaAsP tiene una respuesta lineal a 400 nm, así que uno sólo de
estos fotones, doblemente energéticos, será capaz de excitar un electrón de la
banda de valencia a la banda de conducción. Los dos sistemas descritos
39
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
(absorción de 2-fotones y SHG) se comportan del mismo modo, por lo que la
medición de los pulsos con uno u otro sistema será equivalente.
Para que la generación de segundo armónico sea significativa es
necesario un nivel de intensidad alto. Para ello el láser debe funcionar en
régimen pulsado, y concentrar así toda la energía de un round-trip en un único
pulso con una gran intensidad de pico. Además también es imprescindible que
se cumplan las condiciones de phase-matching que vimos en el capítulo 1. En
efecto observamos como el efecto desaparece cuando el láser pasa a
funcionar de modo pulsado a modo continuo, o bien cambiamos el ángulo del
cristal respecto al haz incidente. La señal de segundo armónico generada
satisface la relación
E SHG (t ) ∝ E (t ) × E (t ) ,
(2.1)
sin embargo, si la intensidad en el cristal, y en consecuencia la eficiencia de
conversión SHG, es demasiado grande, la relación entre la señal de segundo
armónico y el fundamental se convierte en3
E SHG (t ) ∝ E (t ) × tanh [k ⋅ E (t )] .
(2.2)
En este caso k es una constante proporcional a la longitud del cristal y a
la eficiencia de conversión efectiva. Cuando la intensidad es excesiva la
eficiencia de conversión disminuye y el término con la tangente hiperbólica se
aleja del comportamiento lineal. Cuando el argumento de la tanh es 0.174 nos
desviamos un 1% respecto al comportamiento lineal. Estar por debajo de este
valor no es una condición tan restrictiva.
40
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
2.2 El Autocorrelador Colineal
Si medimos la señal de autocorrelación tendremos un máximo cuando
los dos pulsos coincidan exactamente en tiempo. Análogamente, cuando el
retardo aumente y los pulsos coincidan cada vez menos, la señal de
autocorrelación irá decreciendo. Como la variación del retardo es lenta con
respecto a la frecuencia de repetición de los pulsos, la señal de autocorrelación
estará formada por un promedio de los pulsos que interfieren para cada valor
del retardo. Matemáticamente podemos expresar la autocorrelación como
∫
R (τ ) =
∞
−∞
E
[ E (t ) + E (t + τ ) ] dt
2 2
∫
∞
−∞
4
.
E (t ) dt
(2.3)
Sustituyendo la expresión para el campo eléctrico E(t)=E0(t)exp(jω0t) en
2.3 y desarrollando llegamos a
∞
RE (τ ) ∝ ∫ E04 (t ) + E04 (t + τ ) + 4 E02 (t ) E02 (t + τ ) +
−∞
2 E02 (t ) E02 (t + τ ) cos( 2ω 0τ ) +
[
]
(2.4)
4 E03 (t ) E0 (t + τ ) + E0 (t ) E03 (t + τ ) cos(ω 0τ )dt .
La señal de autocorrelación oscila de máximo a mínimo cuando τ cambia
±π/ω0. Para valores grandes del retardo los pulsos dejan de coincidir, por lo que
los términos cruzados con E0(t) y E0(t+τ) serán cero. El nivel de continua
(background) se puede obtener como
∞
RE (∞) ∝ 2 ∫ E04 (t ) dt .
−∞
41
(2.5)
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
En cambio cuando el retardo es cero (τ = 0) la señal de autocorrelación
es máxima. Como los dos pulsos son iguales se llega fácilmente a
∞
RE (0) ∝ 16 ∫ E04 (t )dt .
−∞
(2.6)
La relación entre máximo y background resulta ser de 16/2 es decir 8 a 1
(ver figuras 7 y 9). La autocorrelación resultante se conoce como
autocorrelación interferométrica, debido a que hemos podido resolver las
franjas de interferencia de los términos coseno.
Si por el contrario la electrónica en detección no es capaz de resolver los
cosenos de la ecuación 2.4 las aportaciones correspondientes serán cero y
tendremos que
∞
4
RE (0) 6 ∫− ∞ E0 (t ) dt 3
= ∞
=
4
RE (∞) 2 E (t ) dt 1 .
∫ 0
(2.7)
−∞
En este caso estaremos ante una autocorrelación de intensidad con una
relación entre máximo y background de 3 a 1 (ver figuras 5, 8 y 10). Es posible
alternar entre los dos tipos de autocorrelación modificando la constante de
integración del sistema de detección. Por ejemplo, si conectamos una
resistencia en paralelo a la entrada del osciloscopio estaremos disminuyendo el
tiempo de integración y podremos resolver las franjas de interferencia, mientras
que si la quitamos el tiempo de integración aumentará y estaremos
promediando los cosenos de la ecuación 2.4 para obtener una autocorrelación
de intensidad. La resistencia que se utilizó en nuestro caso era de 5 kΩ,
42
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
aunque en general el valor concreto lo determina la impedancia de entrada del
osciloscopio.
Es importante tener en cuenta que las técnicas basadas en la
autocorrelación únicamente permiten inferir la duración de los pulsos
asumiendo que estos tienen un perfil de intensidad determinado. Además, en
ningún caso nos dan información cuantitativa de la fase, con lo que no
podemos tener una medida de la calidad de nuestros pulsos. Sin embargo, la
simpleza de la técnica nos permite estimar, de una manera rápida, la duración
de los pulsos
El montaje más usual está basado en el interferómetro de Michelson de
la figura 4. En este montaje uno de los dos espejos está fijo, mientras que el
otro está montado sobre un dispositivo que controla su posición. El
autocorrelador que se utilizó en este proyecto consistía en dos espejos de
aluminio, un divisor de haz o beam splitter
(50 / 50) y un fotodiodo de
Arseniuro de Galio y Fósforo (GaAsP), actuando simultáneamente como
dispositivo no lineal y detector.
Figura 4. Montaje genérico de un autocorrelador basado en el
interferómetro de Michelson. El divisor de haz divide el haz de entrada en
dos haces mientras que el espejo móvil aporta los distintos retardos
necesarios para obtener la autocorrelación del pulso.
43
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
El 50% de la potencia que entra al autocorrelador se refleja en el beam
splitter y luego en el espejo fijo. Una parte de esta potencia (50%) se refleja de
nuevo en el beam splitter y regresa hacia el láser, mientras que el otro 50% (un
25% del total) se transmite y termina incidiendo sobre el GaAsP. Un pulso que
sigue esta trayectoria (beam splitter - espejo fijo - beam splitter - detector)
tardará siempre el mismo tiempo en llegar al dispositivo no lineal (GaAsP). En
cambio el pulso que sigue la trayectoria beam splitter - espejo móvil - beam
splitter - detector, y que es una réplica exacta del pulso anterior, llegará al
GaAsP con distintos retardos en función de la posición del espejo móvil. Si
llamamos τ al retardo, la fotocorriente que se genera en el GaAsP depende
cuadráticamente de la interferencia entre los dos pulsos para distintos valores
de τ, lo que formalmente es igual a la definición matemática de autocorrelación
(ver ec. 2.3), salvo por una constante de proporcionalidad.
El espejo móvil del autocorrelador se montó sobre un altavoz excitado
por un generador de funciones, para que oscilara a una frecuencia de 10 Hz.
En realidad, al variar la posición del espejo estamos actuando sobre τ. Cuando
el altavoz se encuentra en la posición central de oscilación, los dos pulsos
deben llegar al mismo tiempo al dispositivo no lineal si queremos que la
autocorrelación aparezca centrada en τ = 0. Esto ocurre cuando la longitud de
los dos brazos del autocorrelador es la misma y ambos pulsos recorren igual
distancia hasta el GaAsP. Por este motivo el espejo fijo se montó sobre una
mesa traslacional micrométrica que permitía ajustar manualmente la posición
de τ = 0. Por último, al montar el espejo móvil sobre un altavoz podremos ver
las autocorrelaciones en tiempo real en la pantalla del osciloscopio.
En el proceso para alinear el beam splitter y los espejos del
autocorrelador tenemos que asegurarnos de que los dos haces viajan
perfectamente colineales antes de incidir en el GaAsP. Para conseguirlo
comprobaremos que el haz de entrada viaja a una altura fija. Después
ajustaremos el beam splitter de modo que el haz reflejado siga una trayectoria
perpendicular a la del haz de entrada, según el eje del autocorrelador.
Análogamente, el haz transmitido por el beam splitter es reflejado 180º por uno
44
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
de los espejos del autocorrelador y posteriormente reflejado por el beam splitter
en la misma dirección que el otro haz. Finalmente ajustaremos los espejos
hasta conseguir que los dos haces sigan exactamente la misma trayectoria
(viajen colinealmente) hacia el detector, manteniendo siempre una altura fija.
El motivo por el que se comenzó por este montaje es que la alineación
es relativamente sencilla comparada con la de un autocorrelador no colineal.
También es más sencillo utilizar un fotodiodo que un cristal de SHG porque los
cristales requieren alineación extra para satisfacer la condición de phasematching.
2.2.1 Autocorrelación de Intensidad
En la sección anterior hemos visto que existen dos tipos de
autocorrelación (de intensidad e interferométrica) y que obtendremos una u otra
en función de la constante de integración del detector. Si se resuelven las
franjas de interferencia obtendremos una autocorrelación interferométrica con
una relación entre máximo y background de 8 a 1. En caso contrario
obtendremos una autocorrelación de intensidad y la relación será de 3 a 1.
En lo que sigue describiré el procedimiento para obtener la duración de
los pulsos a partir de las medidas experimentales, en primer lugar para el tipo
de autocorrelación de intensidad, y en la siguiente sección para la
autocorrelación interferométrica.
En primer lugar tendremos que asegurar que realmente estamos
obteniendo una correcta autocorrelación de intensidad comprobando que existe
una relación de 3 a 1 entre el valor máximo y el nivel de continua (background).
Una vez que haya sido comprobada esta relación se procederá a medir la
anchura temporal (FWHM) de la traza de autocorrelación. El FWHM de la
autocorrelación está relacionado con el FWHM del pulso en función del perfil de
intensidad que supongamos. En la tabla 1 se muestran los factores de
conversión para el caso de pulsos gaussianos o sech²(t).
45
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
τR
τp
Tipo de pulso
gauss(t)
1.414
sech²(t)
1.543
Tabla 1. Factores teóricos de conversión para
autocorrelaciones de intensidad. Permite pasar de
τR (duración de la autocorrelación) a τp (duración
del pulso) para pulsos gaussianos o sech²(t).
Para obtener el FWHM del pulso será necesario realizar una calibración
de la escala de tiempos en la pantalla del osciloscopio. Si al encontrarnos en la
posición central de oscilación de la bocina los caminos ópticos entre ambos
brazos del autocorrelador son idénticos, podremos ver la señal de
autocorrelación tal y como se muestra en la figura 5(a).
El siguiente paso consiste en desplazar el espejo fijo mediante la mesa
traslacional micrométrica, primero en una dirección y luego en la otra. Nos
fijaremos en el segundo pico y anotaremos cual es su desplazamiento en
milisegundos en la pantalla del osciloscopio. Igualmente anotaremos el
desplazamiento total de la mesa micrométrica. En las figuras 5(b) y 5(c) se
muestran ambos desplazamientos, primero hacia la izquierda y después hacia
la derecha.
46
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
Intensidad (u.a)
3
(a)
2
1
0
Intensidad (u.a)
3
(b)
2
1
0
(c)
Intensidad (u.a)
3
2
1
0
-50
0
50
100
150
Retardo (ms)
Figura 5. Ajustando la escala de tiempos del osciloscopio podemos
ver varias autocorrelaciones. (a), (b) y (c) muestran la posición de la
autocorrelación, en función del retardo dado por diferentes
posiciones de la mesa traslacional micrométrica.
47
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
En este ejemplo un desplazamiento total de la mesa micrométrica de 0.1
mm (fig. 5(b) y 5(c)) hizo que el segundo pico se desplazara en la pantalla del
osciloscopio 15.25 ms. Entonces podemos calcular que 1 ms en la pantalla del
osciloscopio se corresponde en realidad con una duración de
1ms ⋅ 2 ⋅ 0.1mm
= 43.7 fs .
15.25 ms ⋅ c
(2.8)
El término 2 en el numerador se explica por el hecho de que al alejar 0.1
mm el espejo que esta montado sobre la mesa traslacional, la luz recorre 0.1
mm a la ida y 0.1 mm a la vuelta, es decir 0.2 mm.
A continuación medimos en la pantalla del osciloscopio el FWHM de la
autocorrelación resultando ser de 5.5 ms. En tal caso, la duración real de la
traza de autocorrelación τR es
τR =
5.5 ms ⋅ 43.7 fs
= 240 fs .
1ms
(2.9)
Finalmente aplicamos el factor de corrección bajo la hipótesis de que los
pulsos tienen un perfil de intensidad sech²(t) y para el tipo de autocorrelación
de intensidad (ver tabla 1). En tal caso la duración de los pulsos τp resulta ser
de
τp =
240 fs
= 155 fs .
1.543
48
(2.10)
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
2.2.2 Autocorrelación Interferométrica
En caso de que el autocorrelador pueda distinguir las franjas de
interferencia obtendremos el otro tipo de autocorrelación conocida como
autocorrelación interferométrica. La señal detectada irá oscilando de máximo a
mínimo para una variación del retardo de τ = π / ω. En efecto, la separación
entre franjas se corresponde con media oscilación de la luz a la frecuencia
central del pulso. En este caso, para verificar que la señal que obtenemos es
realmente una autocorrelación interferométrica deberemos verificar que la
relación entre máximo y background sea de 8 a 1 (ver ec. 2.5 y 2.6).
Es importante tener en cuenta que, mientras que la autocorrelación de
intensidad detecta únicamente la intensidad de los pulsos, la interferométrica
depende de cómo las distintas longitudes de onda que componen el pulso
interfieren entre sí.
Si el pulso está Limitado por Transformada de Fourier (no tiene chirp), la
frecuencia instantánea es constante y la interferencia se produce tanto para
retardos cercanos al máximo de la autocorrelación, como para retardos más
grandes correspondientes a las colas del pulso. Cuando el pulso tiene chirp la
frecuencia instantánea varía a lo largo del pulso, originando una pérdida de
coherencia que aumenta a medida que el retardo se aleja de τ = 0. En tal caso
la interferencia de los dos pulsos (original y réplica) se pierde progresivamente,
debido a que sus frecuencias instantáneas difieren cada vez más. Esto supone
una disminución del número de franjas de interferencia por pérdida de
visibilidad, que a su vez se traduce en una estimación errónea de la duración
de los pulsos. Dado que la medida se obtiene básicamente contando franjas el
pulso parecerá más corto de lo que en realidad es.
La autocorrelación interferométrica no es fiable para determinar τp, pero
permite determinar cualitativamente si los pulsos tienen o no chirp. Con la
autocorrelación de intensidad conocemos la duración real de los pulsos pero no
49
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
tenemos información cualitativa de su fase. Nos encontramos pues ante dos
medidas que se complementan a la perfección.
Al igual que antes la tabla 2 muestra los factores de conversión entre la
duración de la autocorrelación y la duración de los pulsos, en este caso para
autocorrelaciones interferométricas.
Tipo del pulso
τR
τp
gauss(t)
1.697
sech²(t)
1.897
Tabla 2. Factores teóricos de conversión para
autocorrelaciones interferométricas. Permite pasar
de τR (duración de la autocorrelación) a τp (duración
del pulso) para pulsos gaussianos ó sech²(t).
El método para obtener la duración de los pulsos a partir de una
autocorrelación interferométrica es distinto que en el caso anterior. En primer
lugar procederemos a contar las franjas de interferencia que hay dentro del
FWHM de la autocorrelación. A partir del número de franjas se obtiene la
duración de la autocorrelación τR como
τR =
N ⋅λ
c
,
(2.11)
donde N es el número de franjas de interferencia, λ la longitud de onda central
del pulso y c, la velocidad de la luz en el vacío.
Finalmente dividiremos esta duración por el factor de corrección que
corresponda, según el perfil de intensidad que supongamos. La figura 6
muestra en detalle las franjas de interferencia que podemos ver en la pantalla
del osciloscopio.
50
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
1,0
Intensidad (u.a)
0,8
0,6
0,4
0,2
0,0
26,4
26,6
26,8
27,0
27,2
Retardo (ms)
Figura 6. Detalle de las franjas de interferencia de una
autocorrelación interferométrica. Es posible determinar ∆τR
contando el número de franjas.
En las figuras 7 y 9 se pueden ver ejemplos de autocorrelación
interferométrica. Ambas trazas están formadas por franjas de interferencia
como las que se muestran en la figura 6.
2.2.3 Resultados Experimentales
Una resistencia de 5 kΩ conectada en paralelo a la entrada del
osciloscopio reducía el tiempo de integración del detector y, de ese modo, se
resolvían las franjas de interferencia. Después de alinear minuciosamente y
encontrar la posición de retardo cero se pudo ver en la pantalla del osciloscopio
la primera autocorrelación interferométrica. Se trataba de una autocorrelación
de pulsos centrados a 790 nm y con 97 franjas dentro del FWHM. Haciendo
uso de la ecuación 2.11 y de la tabla 2 resulta una duración τp de 135 fs para
pulsos sech²(t).
El siguiente paso fue obtener una autocorrelación de intensidad. Para
ello desconectamos la resistencia de 5 kΩ. Después de realizar algunos ajustes
51
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
y obtener una relación entre máximo y background de 3 a 1 se midió la
duración de la autocorrelación según el criterio de FWHM. Aplicando los
factores de corrección de la tabla 1 para pulsos sech²(t) resultaba una duración
τp de 160 fs. Existe una fuerte discordancia entre ambas medidas que muy
probablemente se debe a que los pulsos tienen algún tipo de distorsión en la
fase (chirp). En tal caso los resultados más fiables son los obtenidos a partir de
la autocorrelación de intensidad.
La figura 7 muestra una autocorrelación interferométrica de pulsos
centrados a 830 nm que fue tomada posteriormente. Se puede observar cómo
las franjas de interferencia correspondientes a las colas del pulso se elevan
sobre el nivel de background, lo que en principio parece indicar que los pulsos
tienen chirp. La figura 8 muestra la autocorrelación de intensidad de estos
mismos pulsos. En el primer caso la duración estimada de los pulsos es de 115
fs mientras que en el segundo τp es igual a 155 fs.
8
λc = 830 nm
Intensidad (u.a)
7
6
5
τp = 115 fs
4
3
2
1
0
-300
-200
-100
0
100
200
300
Retardo (fs)
Figura 7. Autocorrelación interferométrica de pulsos de 115
fs de duración estimada. Suponemos un perfil de
intensidad sech²(t).
52
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
Intensidad (u.a)
3
λc = 830 nm
τp = 155 fs
2
1
0
-400
-300
-200
-100
0
100
200
300
400
Retardo (fs)
Figura 8. Autocorrelación de intensidad de pulsos de
155 fs de duración estimada. Suponemos un perfil de
intensidad sech²(t).
Con el objetivo de verificar que la presencia de chirp en los pulsos era
responsable de la diferencia entre las medidas interferométricas y las medidas
de intensidad se procedió a compensar la dispersión del láser. Ajustando la
posición de los espejos de la cavidad se maximizó la potencia mientras que
actuando sobre la inserción de los prismas fue posible compensar mejor la
dispersión y obtener pulsos más cortos. Las figuras 9 y 10 muestran la
autocorrelación interferométrica y de intensidad bajo estas condiciones.
La autocorrelación de intensidad es consistente y estima τp en 140 fs. En
efecto los pulsos son ahora más cortos. Pero no pasa lo mismo con la medida
interferométrica. La duración de los pulsos ha disminuido y sin embargo la
estimación de τp ha aumentado pasando de 115 a 130 fs. Lo que está
sucediendo es que al disminuir la cantidad de chirp ha aumentado la visibilidad
de las franjas de interferencia y la estimación de τp se acerca más al valor real.
53
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
8
λc = 830 nm
Intensidad (u.a)
7
6
5
τp = 130 fs
4
3
2
1
0
-300
-200
-100
0
100
200
300
Retardo (fs)
Figura 9. Autocorrelación interferométrica después de
compensar la dispersión del láser. La duración estimada de
los pulsos es ahora de 130 fs.
Intensidad (u.a)
3
λc = 830 nm
τp = 140 fs
2
1
0
-400
-300
-200
-100
0
100
200
300
400
Retardo (fs)
Figura 10. Autocorrelación de intensidad después de
compensar la dispersión del láser. La duración estimada de
los pulsos ha disminuido hasta los 140 fs.
54
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
La autocorrelación interferométrica en presencia de chirp nos conduce a
una estimación errónea de la duración de los pulsos. Aunque por una parte
permite detectar la existencia de chirp, en ningún caso se obtiene información
cuantitativa de la fase de los pulsos. La autocorrelación de intensidad, en
cambio, aporta información cuantitativa y fiable sobre τp y el perfil de intensidad
de los pulsos, lo que permite, por lo menos, la caracterización parcial de los
pulsos. Por este motivo en adelante ya no se utilizará la autocorrelación
interferométrica para estimar τp.
El siguiente paso consistió en añadir al sistema un cristal de generación
de segundo armónico (SHG) como elemento no lineal. La figura 11 muestra la
autocorrelación de intensidad que se obtuvo utilizando el cristal de SHG.
λc = 830 nm
Intensidad (u.a)
3
τp = 140 fs
2
1
0
-400
-300
-200
-100
0
100
200
300
400
Retardo (fs)
Figura 11. Autocorrelación obtenida mediante generación
de segundo armónico.
La autocorrelación resultante es idéntica a la obtenida mediante el
proceso de absorción de dos fotones (fig. 10), confirmando que la respuesta de
un cristal de SHG es igualmente válida para obtener autocorrelaciones.
55
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
2.3 El Autocorrelador No-Colineal
El autocorrelador no-colineal es una variación del autocorrelador descrito
en la sección 2.2. En este caso los dos haces viajan de forma no colineal antes
de que una lente los enfoque sobre un cristal de generación de segundo
armónico (SHG). Los haces deben viajar equidistantes del eje de la lente de
modo que se enfoquen exactamente en el mismo punto del cristal. Únicamente
la señal generada correspondiente a la interacción entre pulsos continuará en
la dirección del eje óptico, siendo entonces necesario el uso de otra lente para
colimar el haz de SHG, que finalmente será detectado por el fotodiodo (ver fig.
12). La componente de continua (background) se perderá con un cierto ángulo
que dependerá de la distancia focal de la lente que utilicemos.
Un aspecto a tener en cuenta es que cuando estemos trabajando con
este modelo las relaciones entre máximo y background que vimos en la sección
2.2 ya no serán válidas. Sin embargo los métodos de calibración de la duración
de los pulsos siguen siendo los mismos.
Figura 12. Autocorrelador no colineal utilizando un cristal de SHG.
56
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
En un primer momento al no contar con reflectores disponibles se trabajó
con un prisma de reflexión total interna. Debíamos tener en cuenta que se
introducía un elemento dispersivo en una de las ramas del interferómetro. La
figura 13 muestra una autocorrelación de intensidad correspondiente a pulsos
de 140 fs.
Intensidad Normalizada (u.a)
1,0
λc = 830 nm
0,8
0,6
τp = 140 fs
0,4
0,2
0,0
-400
-300
-200
-100
0
100
200
300
400
Retardo (fs)
Figura 13. Autocorrelación de intensidad para pulsos de
140 fs centrados a 830nm.
El sistema funcionaba correctamente. La duración de los pulsos se
mantenía en 140 fs después de haber introducido el prisma y el cristal de SHG.
El nivel de continua como era de esperar había desaparecido.
El siguiente paso consistió en realizar dos pequeñas modificaciones. En
primer lugar cambiar el altavoz por una mesa traslacional, controlada por el
ordenador, sobre la que se montó el espejo móvil y en segundo lugar, sustituir
el prisma por un reflector para evitar el uso de elementos dispersivos. La idea
que hay detrás de estas modificaciones es tener un sistema automatizado,
controlando todos los parámetros desde el PC, para la medición de los pulsos
ultracortos de forma sistemática. Con este nuevo modelo ya no es necesario
57
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
calibrar cada vez la escala de tiempos. Dado que conocemos la distancia
exacta que se mueve la mesa entre muestra y muestra (∆x) podemos calcular
su equivalencia en tiempo como
∆t =
2 ⋅ ∆x
,
c
(2.12)
donde c representa la velocidad de la luz en el vacío y ∆x dicha distancia.
Sin embargo ya no será posible ver la autocorrelación en tiempo real. El
espejo móvil efectuará un único barrido con incrementos de ∆x. Se tomará una
medida de la intensidad después de cada desplazamiento hasta completar un
total de N muestras. Una vez finalizado el proceso podremos ver en la pantalla
del ordenador una gráfica con los resultados.
Al principio se comenzó trabajando con autocorrelaciones de 300 puntos
e incrementos de 5 fs. La figura 14 muestra un ejemplo para pulsos de 140 fs
centrados a 825 nm.
Intensidad Normalizada (u.a)
1,0
λc = 825 nm
0,8
0,6
τp = 140 fs
0,4
0,2
0,0
-400
-200
0
200
400
Retardo (fs)
Figura 14. Autocorrelación de 300 puntos con una
separación entre muestras de 5 fs. La duración estimada
de los pulsos es de 140 fs.
58
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
Más adelante se modificaron estos parámetros. Para N igual a 100
muestras e incrementos de 10 fs era posible obtener autocorrelaciones en una
tercera parte del tiempo y con una definición igualmente válida. La figura 15
muestra un ejemplo para pulsos de 165 fs centrados a 800 nm.
Intensidad Normalizada (u.a)
1,0
λc = 800 nm
0,8
0,6
τp = 165 fs
0,4
0,2
0,0
-400
-300
-200
-100
0
100
200
300
400
Retardo (fs)
Figura 15. Autocorrelación de 100 puntos con una separación
entre muestras de 10 fs. La duración estimada de los pulsos
es de 165 fs.
Al cambiar la longitud de onda y no ajustar los prismas del láser ha
aumentado la dispersión en la cavidad. En cualquier caso obtenemos las
autocorrelaciones correctamente pero ahora de forma más rápida.
Como se había mencionado anteriormente, el conjunto de medidas de
autocorrelaciones de intensidad e interferométricas nos dan sólo una
estimación de la duración del pulso (asumiendo un cierto perfil de intensidad) y
una medida cualitativa de su fase. Para obtener estos parámetros, en el
siguiente capítulo se introduce la técnica de FROG. El montaje para esta
técnica es prácticamente idéntico al que acabamos de ver. La única diferencia
es que para cada retardo, en vez de tomar una medida de intensidad de la
señal de autocorrelación, se mide su espectro. La mesa traslacional nos
permitirá variar el retardo y esperar el tiempo necesario para capturar el
espectro correspondiente.
59
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
2.4 Conclusiones
En este capítulo hemos comprobado que la autocorrelación es un
método válido para determinar la duración de los pulsos ultracortos de un láser
de Titanio-Zafiro. Sin embargo, la información que tenemos de la fase es
cualitativa y no permite la caracterización completa (módulo y fase) del campo
eléctrico asociado a los pulsos. Tampoco hay que olvidar que la exactitud con
la que se estima τp depende de cuanto se parecen los pulsos reales al perfil de
intensidad que hemos supuesto.
Se comenzó viendo que tanto el proceso de absorción de dos fotones,
como el de generación de segundo armónico, son igualmente válidos para
implementar un autocorrelador. El uso de un cristal de SHG nos permitió dar el
paso hacia el interferómetro no-colineal, en el que desaparece la componente
de continua o background. También vimos que los dos tipos de autocorrelación
posibles se complementan a la perfección. La autocorrelación de intensidad
permite estimar con fiabilidad τp, mientras que a partir de la autocorrelación
interferométrica conocemos la existencia de chirp en los pulsos. Finalmente, se
modificó el autocorrelador no-colineal añadiendo una mesa traslacional
micrométrica, controlada desde el PC, y que permitía una variación fina y
automatizada del retardo. Este fue el paso previo hacia la técnica de
caracterización de pulsos ultracortos conocida como FROG, y que veremos a
continuación.
60
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
2.5 Referencias
1. P. Loza-Alvarez, “Ultrashort pulse generation using quasi-phasematched crystals”
(University of St. Andrews, North Haugh, St. Andrews, Scotland, 2000), Chap. 3.
2. Y. Takagi, T. Kobayashi, K. Yoshihara, and S. Imamura, “Multiple-shot and single-shot
autocorrelator based on 2-photon conductivity in semiconductors”, Opt. Lett. 17, 658 –
660 (1992).
3. K. W. DeLong, R. Trebino, J. Hunter, and W. E. White, “Frequency-resolved optical
gating with the use of second-harmonic generation”, J. Opt. Soc. Am. B 11, 2206 –
2215 (1994).
61
Capítulo 2: La Técnica de Autocorrelación
Caracterización de Pulsos de Luz Láser Ultracortos
CAPÍTULO 3
FREQUENCY-RESOLVED OPTICAL GATING
En este capítulo se presenta la técnica de Frequency-Resolved Optical
Gating (FROG) con el objetivo de caracterizar los pulsos ultracortos a la salida
del láser de Titanio-Zafiro que se utilizó en el laboratorio (ver sección 1.3.4). La
técnica de FROG es una poderosa herramienta ya que, al contrario de lo que
sucede en la técnica de autocorrelación, no se presupone un perfil de
intensidad determinado, sino que es calculado y además, permite obtener una
medida de la evolución temporal de la fase de los pulsos.
Se comenzará introduciendo la técnica de FROG y comentando sus
ventajas respecto la técnica de autocorrelación. Veremos la implementación
concreta de nuestro sistema FROG, utilizando la respuesta no lineal de un
cristal de generación de segundo harmónico y basado en el autocorrelador no
colineal descrito en el capítulo 2. También hablaremos del algoritmo que
permite obtener el pulso a partir de las medidas experimentales o traza FROG,
y de algunas consideraciones, entre las que se encuentra la ambigüedad
temporal que afecta al pulso reconstruido. Se mostrarán los resultados
obtenidos aplicando el algoritmo de FROG y, en la última sección, los que se
obtuvieron con un algoritmo distinto (X-FROG).
3.1 La Técnica de Frequency-Resolved Optical Gating
Para caracterizar un campo eléctrico arbitrario E(t) es necesario conocer
tanto su módulo como su fase. Si lo que se pretende es caracterizar un pulso
62
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
ultracorto será preciso trabajar con sistemas que permitan obtener medidas de
ambas magnitudes.
La técnica de autocorrelación no aporta ninguna medida de la fase de
los pulsos, mientras que las medidas del módulo están condicionadas por la
hipótesis sobre su perfil de intensidad.
La técnica de la que hablaremos en adelante, conocida como
Frequency-Resolved Optical Gating (FROG)1, permite caracterizar la evolución
temporal del módulo y de la fase de un pulso ultracorto arbitrario. La técnica de
FROG no presupone una forma de pulso determinada y su montaje en el
laboratorio es relativamente sencillo. Además el sistema de detección, montado
a la salida de un interferómetro, puede constar simplemente de un
espectrómetro, un fotodiodo y un osciloscopio.
Para obtener la intensidad y la fase del pulso mediante la técnica de
FROG podemos distinguir dos partes. La primera de ellas es experimental y se
encarga de tomar una serie de medidas. En nuestro caso esta parte funciona
de forma totalmente automática. En la segunda parte un algoritmo reconstruye
el pulso a partir de los datos experimentales capturados en la primera parte.
El montaje de laboratorio es muy similar al del autocorrelador no-colineal
que vimos en la sección 2.3, con la única diferencia de que en este caso la
señal generada se envía a un espectrómetro para ser resuelta en frecuencia
(ver fig. 1). En principio parece más sencillo aplicar la técnica de FROG sobre
el autocorrelador colineal, substraer el nivel de background de las medidas y
finalmente aplicar el algoritmo. A la práctica el autocorrelador colineal tiene,
además del nivel de continua, un nivel de interferencia que no conocemos. Por
esta razón es más factible basar la técnica de FROG en el autocorrelador nocolineal, libre del nivel de background (continua + interferencia), aunque resulte
algo más complicado de alinear. Al igual que el autocorrelador no-colineal, el
sistema FROG estará libre de cualquier componente de continua o background.
63
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
Figura 1. Implementación del sistema FROG mediante generación de segundo
armónico (SHG-FROG).
En el sistema FROG el pulso E(t) y una réplica retardada t = τ
interaccionan en el cristal de generación de segundo armónico, exactamente
igual que en el autocorrelador no-colineal.2 La señal de segundo armónico
generada, o señal de autocorrelación, es colimada y filtrada espacialmente
para eliminar la componente de fundamental. Entonces la señal filtrada es
dirigida al espectrómetro con el fin de obtener su espectro en función del
retardo del autocorrelador. Si anteriormente las autocorrelaciones estaban
formadas por medidas de intensidad de la señal generada en el cristal, para
distintos valores del retardo τ, ahora obtendremos medidas del espectro de esa
misma señal, también para distintos valores de τ. El resultado es una matriz de
datos o traza FROG que dependerá de λ en una dirección y de τ en la otra. A
partir de la traza FROG y de un algoritmo es posible reconstruir el módulo y la
fase del pulso E(t). La figura 1 muestra el montaje que se utilizó en el
laboratorio. Al principio se comenzó trabajando con un sistema de detección,
colocado a la salida del espectrómetro, que incluía un fotodiodo lineal de
GaAsP y el osciloscopio o el amplificador de lock-in. Cada espectro se obtenía
haciendo un barrido en longitud de onda, lo cual se conseguía variando la
orientación de la rejilla de difracción del espectrómetro. En una segunda
versión se utilizó una cámara CCD a la salida del espectrómetro para reducir el
tiempo de adquisición de datos (ver sección 3.1.4).
64
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
3.1.1 Teoría de SHG-FROG
Un sistema SHG-FROG es aquel que utiliza, como elemento no lineal, la
respuesta cuadrática de un cristal de generación de segundo armónico (SHG).
Si además el sistema está basado en un autocorrelador no-colineal (libre de
background) la señal generada en el cristal de SHG se puede escribir como
Esig (t , τ ) = E (t ) ⋅ E (t − τ ) ,
(3.1)
donde E(t) es el campo eléctrico asociado a un pulso arbitrario y E(t-τ) una
réplica exacta del mismo pulso, pero retardada un tiempo t = τ. Nótese que la
ecuación relaciona la envolvente compleja (sin la frecuencia portadora) de
Esig(t) con la de E(t), en función de τ. La relación entre las frecuencias
portadoras de Esig(t), E(t) y E(t-τ) ya la conocemos. Si ω0 es la frecuencia
portadora o frecuencia central del pulso E(t), entonces la frecuencia central del
pulso retardado E(t-τ) será igualmente ω0, y la de la señal Esig(t) será 2ω0, pues
ha sido generada en cristal de SHG.
A la salida del espectrómetro se detecta la intensidad de las distintas
componentes que forman el espectro de Esig(t,τ), lo que podemos expresar
matemáticamente como
IFROG (ω , τ ) =
∫
∞
−∞
2
Esig (t , τ ) exp( jωt ) dt =
= Esig (ω , τ )
2
65
.
(3.2)
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
El resultado es la función IFROG(ω,τ) igual a la intensidad de Esig(ω,τ), que
a su vez depende de la frecuencia ω y del retardo τ, y a partir de la cual se
construye la traza FROG correspondiente. Basta con tomar valores discretos
de ω y τ para obtener una matriz de datos que permite reconstruir el módulo y
la fase del pulso E(t). Una consideración a tener en cuenta es que Esig(t,τ) es
invariante con respecto al signo del retardo, por lo que las trazas SHG-FROG
son siempre simétricas respecto τ.
Veamos ahora el parecido de FROG con otra técnica. El espectrograma
de una señal E(t) se define como
S E (ω , τ ) ≡
∫
∞
−∞
E (t ) g (t − τ ) exp( jωt ) dt
2
,
(3.3)
donde g(t) es una ventana independiente de E(t), en el dominio temporal y cuya
forma, normalmente rectangular o gaussiana, es bien conocida. La técnica de
FROG es equivalente al espectrograma de E(t) para el caso en que g(t) = E(t),
pero no la podemos considerar como tal porque desconocemos la forma de la
ventana; además tampoco es independiente de E(t). La ventaja de la técnica de
FROG respecto a la de espectrograma es que no necesitamos de una fuente
externa para generar una ventana de duración ultracorta, pues nos basta con
una replica retardada del mismo pulso. En cualquier caso el espectrograma es
una técnica utilizada en acústica desde hace tiempo3, y de la que se conocen
muy bien todas sus propiedades. Algunas de estas propiedades (ver sección
3.1.2), también válidas para FROG, nos serán de gran utilidad para interpretar
los resultados que obtendremos.
66
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
3.1.2 Consideraciones Experimentales
La simetría de las trazas SHG-FROG nos conduce a una ambigüedad
temporal en el campo eléctrico reconstruido: los pulsos E(t) y E*(-t) generan
trazas idénticas, por lo que no es posible distinguirlos. Esto significa que no
conocemos en que dirección avanza el eje de tiempos, y que tampoco
sabemos si el signo de la fase es el correcto. Para entender el problema
tomemos el siguiente pulso gaussiano con chirp lineal (ver cap. 1)
E (t ) = exp( − at 2 + jbt 2 ) .
(3.4)
Introduciendo la expresión de E(t) para un pulso con chirp lineal (ec. 3.4)
en la ecuación 3.2 se obtiene la traza FROG correspondiente1
− 4( a 3 + ab 2 )τ 2 − aω 2
IFROG (ω , τ ) = exp
.
2
2
+
4
(
)
a
b
(3.5)
La traza es independiente del signo de b por lo que no es posible
distinguir un pulso con chirp lineal positivo de otro con chirp lineal negativo.
Para averiguar la dirección temporal y distinguir entre E(t) y E*(-t) es necesario
aplicar algún tipo de conocimiento a priori. Por lo general se introduce un medio
con dispersión positiva conocida y se compara el cambio de fase con y sin el
medio. En cualquier caso la ambigüedad temporal sólo afecta a distorsiones de
fase de orden par.
Algunas de las propiedades del espectrograma, entre las que se
encuentran el marginal de tiempo y el de frecuencia, pueden utilizarse como
herramientas para interpretar las trazas FROG obtenidas.4 El marginal de
tiempo de una traza SHG-FROG se define como
67
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
∞
∞
−∞
−∞
M τ (τ ) ≡ ∫ IFROG (ω , τ )dω = ∫ I (t ) ⋅ I (t − τ ) dt .
(3.6)
Mτ(τ) es igual a la autocorrelación de intensidad del pulso, por lo que
deberá
coincidir
con
la
autocorrelación
de
intensidad
medida
experimentalmente. El marginal de frecuencia de la traza FROG se define
como
∞
M ω (ω ) ≡ ∫ IFROG (ω , τ ) dτ
−∞
.
(3.7)
En este caso deberemos verificar que el ancho de banda de Mω(ω) sea
la mitad del ancho de banda del fundamental.
3.1.3 El Algoritmo para SHG-FROG
Una vez obtenida la traza FROG experimentalmente aplicaremos un
algoritmo para obtener el módulo y la fase del pulso E(t). Los algoritmos para
reconstruir el pulso con la técnica de espectrograma necesitan conocer la
forma de la ventana g(t), por lo que no es posible su uso en SHG-FROG. La
figura 2 muestra el algoritmo utilizado en nuestro caso.
E ' sig (t , τ )
∞
E (t ) = ∫ E ' sig (t ,τ )dτ
−∞
TF-1
respecto ω
Esig (t ,τ ) = E (t ) ⋅ E (t − τ )
TF
respecto t
Cambiar el módulo de
Esig(ω,τ) por √IFROG(ω,τ)
'
(ω ,τ )
Esig
Esig (ω ,τ )
Figura 2. Diagrama del algoritmo para invertir la traza FROG y obtener el módulo y
la fase del pulso.
68
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
El objetivo del algoritmo es encontrar una señal Esig(t,τ) que cumpla dos
condiciones. En primer lugar, su traza FROG calculada como en la ecuación
3.2 debe coincidir con los datos experimentales (primera condición). En
segundo lugar, tiene que tratarse una señal generada a partir de E(t) según la
ecuación 3.1 (segunda condición).5 Una vez conocemos la señal Esig(t,τ) que
satisface
ambas
condiciones,
podemos
conocer
directamente
E(t),
simplemente integrando Esig(t,τ) respecto τ.
A continuación se detalla el funcionamiento del algoritmo según la figura
2. En primer lugar se toma un pulso E(t) arbitrario, al que aplicaremos la
segunda condición para obtener Esig(ω,τ). Entonces hacemos la Transformada
de Fourier de Esig(t,τ) respecto t para obtener Esig(ω,τ). Cambiando el módulo
de Esig(ω,τ) por el módulo (raíz cuadrada) de la traza experimental forzamos a
que se cumpla la primera condición. Finalmente se toma la transformada
inversa respecto ω para obtener E’sig(t,τ) e integramos respecto τ para obtener
E(t).
Nótese que si el algoritmo converge, Esig(t,τ) cumplirá a la fuerza la
primera y segunda condición, y también que es necesario alternar entre TF y
TF-1 porque la primera condición está en el dominio de la frecuencia, y la
segunda en el dominio temporal. Aunque el algoritmo siempre ha funcionado
correctamente, su convergencia no está demostrada matemáticamente.1,5
Por último, cabe mencionar que en nuestro caso, el algoritmo está
escrito en lenguaje Matlab, y que se aplica sobre una traza de 128 por 128
obtenida mediante interpolación de la traza original. Trabajando con potencias
de dos (27 = 128) podemos recurrir a la Fast Fourier Transform (FFT) para
agilizar el proceso considerablemente (ver apéndice).
69
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
3.1.4 Resultados Experimentales
La técnica de FROG se utilizó en el laboratorio para caracterizar los
pulsos ultracortos a la salida de un láser de Ti:Zafiro Mira Optima 900-F de
Coherent, bombeado por un láser Verdi-V10, también de Coherent, de 10 W de
potencia (ver cap.1).
En un primer momento se comenzó trabajando con un fotodiodo a la
salida del espectrómetro, trabajando como monocromador (rendija de salida
muy pequeña). Para obtener un espectro, la rejilla de difracción efectuaba un
barrido de 60 muestras separadas 0.3 nm para cada uno de los 100 valores del
retardo τ. La mesa traslacional se movía con incrementos equivalentes a 10 fs.
El siguiente paso consistió en convertir la traza de 60 x 100 puntos a una nueva
traza de 128 x 128 a la que finalmente se aplicaba el algoritmo. Si tenemos en
cuenta que el tiempo entre muestra y muestra es de medio segundo a un
segundo, podemos calcular el tiempo total necesario para obtener una traza
FROG, en el caso optimista de medio segundo por muestra, como
0 .5
seg
× [100 × 60] muestras = 3000 seg = 50 min .
muestra
(3.8)
Vemos que como mínimo son necesarios 50 minutos para obtener una
traza FROG completa. Después de obtener algunas trazas y verificar que el
programa FROG.vi funcionaba correctamente se reemplazó el detector a la
salida del espectrómetro (ahora con la rendija de salida completamente abierta)
por una cámara CCD y se pasó a utilizar el programa FROG_CCD.vi. De este
modo el espectro se capturaba de una sola vez para cada uno de los 100
valores distintos del retardo. Si tenemos en cuenta que ahora capturar un
espectro es equivalente a tomar una medida, el tiempo que necesitamos para
obtener una traza FROG completa es 60 veces menor.
70
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
0 .5
seg
× 100 medidas = 50 seg
medida
(3.9)
En la ecuación de arriba vemos que el tiempo total cuando utilizamos la
cámara CCD es de sólo 50 segundos. Podríamos preguntarnos por qué utilizar
el sistema espectrómetro más detector, que tarda del orden de una hora en
obtener una traza, cuando disponemos del sistema espectrómetro más cámara
CCD, 60 veces más rápido y que permite obtener la traza en menos de 1
minuto. La respuesta es que utilizaremos la cámara siempre que podamos, es
decir, cuando ésta sea sensible a la longitud de onda de trabajo (ver cap. 4).
Para el resto de longitudes de onda será preciso utilizar un detector adecuado y
que el espectrómetro realice un barrido para cada valor del retardo. Con el
sistema que he implementado aquí, dado el detector y el cristal no lineal
adecuados, será posible caracterizar un pulso ultracorto a cualquier longitud de
onda.
Los resultados que se muestran a continuación fueron tomados con la
cámara CCD y en todos los casos los pulsos estaban centrados a 805 nm. Por
otra parte se eliminaron las variaciones de fase de orden cero y de primer
orden de los pulsos obtenidos con el algoritmo. Las únicas variaciones de fase
significativas son a partir de segundo orden (ver cap. 1). En adelante cuando
hablemos de resultados numéricos nos estaremos refiriendo a resultados
calculados o reconstruidos por el algoritmo.
En la figura 3 se muestra una primera traza medida experimentalmente,
así como la traza reconstruida o numérica. Si nos fijamos en la parte más clara
de la gráfica se puede apreciar que la traza original tiene un poco de ruido.
Como las trazas FROG tienen que ser simétricas respecto al eje del retardo el
algoritmo tiende a ignorar las componentes asimétricas, como es el caso del
ruido. La traza numérica es prácticamente igual a la experimental en las partes
más intensas del pulso, salvo que el algoritmo ha eliminado la parte
correspondiente al ruido de fondo.
71
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
410
410
(b)
Longitud de Onda (nm)
Longitud de Onda (nm)
(a)
405
400
395
-450
-300
-150
0
150
300
405
400
395
-450
450
-300
Retardo (fs)
-150
0
150
300
450
Retardo (fs)
Figura 3. Traza FROG #1 medida en el laboratorio (a) y calculada por el algoritmo (b)
de pulsos centrados a 805 nm.
A continuación en la figura 4(a) se muestra el pulso calculado por el
algoritmo junto con su fase y en la 4(b), el espectro del fundamental medido
experimentalmente y calculado por el algoritmo.
(a)
0,4
0,3
τp = 155 fs
0,6
0,2
0,4
0,1
0,2
Intensidad Normalizada (u.a)
0,8
(b)
1,0
Fase (rad)
Intensidad Normalizada (u.a)
1,0
0,8
0,6
0,4
0,2
0,0
-450
-300
-150
0
150
300
0,0
450
0,0
790
Tiempo (fs)
795
800
805
810
815
820
Longitud de Onda (nm)
Figura 4. (a) Intensidad (línea continua) y fase (línea discontinua) del pulso con τp = 155
fs y b = -1E-6 fs-2. (b) Espectro del láser medido experimentalmente (línea 5 nm) y
calculado por el algoritmo (círculos). El producto duración del pulso por ancho de banda
es de 0.358.
La duración del pulso, estimada en 155 fs, coincide con la duración
teórica calculada a partir de la duración de la autocorrelación τR (240 fs / 1.543)
72
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
y el factor de conversión para pulsos sech²(t). Por otra parte, al ver la ligera
curvatura de la fase del pulso se llega a la conclusión de que los pulsos tienen
un poco de chirp. En efecto, el producto duración por ancho de banda (0.358),
algo mayor que el de un pulso sech²(t) Limitado por Transformada de Fourier
(0.315), confirma este hecho.
En cuanto al espectro reconstruido vemos que es ligeramente más
ancho que el experimental. La calibración de la cámara CCD puede no ser tan
precisa como era de esperar. También es posible que las condiciones de
phase-matching no se cumplan para todo el ancho de banda del pulso o que el
ruido esté afectando en cierta medida al algoritmo.
Para salir de dudas se comparó el ancho de banda del fundamental con
el marginal de frecuencia de la traza experimental. Dos veces Mλ(λ) es igual a
4.5 nm, medio punto por debajo de los 5 nm del fundamental. En tal caso el
phase-matching en el cristal de SHG
es del 90%. Otra comparación que
podemos hacer es la de autocorrelación SHG con absorción de dos fotones. En
la figura 5(b) vemos que las dos autocorrelaciones coinciden bastante bien, por
lo que el phase-matching parece no ser tan crítico. En la 5(a) se muestra la
autocorrelación SHG comparada con la que ha calculado el algoritmo,
ligeramente más estrecha.
0,8
1,0
(a)
Intensidad Normalizada (u.a)
Intensidad Normalizada (u.a)
1,0
τp = 155 fs
0,6
0,4
0,2
0,0
-450
0,8
(b)
τp = 155 fs
0,6
0,4
0,2
-300
-150
0
150
300
0,0
-450
450
Retardo (fs)
-300
-150
0
150
300
450
Retardo (fs)
Figura 5. (a) Autocorrelación SHG de 240 fs medida experimentalmente (línea) y
calculada por el algoritmo (círculos). En (b) la misma autocorrelación SHG de 240 fs
(línea) comparada con la de absorción de dos fotones (círculos), también medida
experimentalmente.
73
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
Hasta ahora hemos visto que tanto el espectro del fundamental como la
autocorrelación experimental están muy cerca de los obtenidos numéricamente
a partir de los resultados de FROG. También que podemos confiar en la
estimación de la duración del pulso porque coincide con el valor teórico
calculado a partir de la duración de la autocorrelación. El siguiente paso
consistió en corregir la posición del cristal de SHG para que el phase-matching
fuera del 100% y capturar dos trazas, un detrás de otra, para verificar que los
resultados sean consistentes.
Las figuras 6(a) y 6(b) muestran las trazas #2 y #3 medidas
experimentalmente y debajo, en la 6(c) y 6(d), están las trazas numéricas
calculadas por el algoritmo. Como las dos trazas se tomaron una detrás de otra
es de esperar que los resultados obtenidos sean muy parecidos.
410
410
(b)
Longitud de Onda (nm)
Longitud de Onda (nm)
(a)
405
400
395
-450
-300
-150
0
150
300
405
400
395
-450
450
-300
-150
Retardo (fs)
0
150
(d)
Longitud de Onda (nm)
(c)
Longitud de Onda (nm)
450
410
410
405
400
395
-450
300
Retardo (fs)
-300
-150
0
150
300
405
400
395
-450
450
-300
-150
0
150
300
450
Retardo (fs)
Retardo (fs)
Figura 6. (a) Traza FROG #2 y (b) #3 medidas experimentalmente y calculadas por el
algoritmo por el algoritmo, (c) y (d), de pulsos centrados a 805 nm.
74
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
La primera traza, la #2, presenta una ligera asimetría debida al ruido que
ha sido eliminada en la traza numérica. En la segunda traza la simetría es más
evidente y el ruido no afecta tanto a las componentes de mayor intensidad. La
duración del pulso reconstruido es, en ambos casos, de 155 fs y al igual que
antes tenemos un poco de chirp (ver figura 7).
Intensidad Normalizada (u.a)
0,8
1,0
0,3
τp = 155 fs
0,6
0,2
0,4
0,1
0,2
0,0
-450
-300
-150
0
150
0,8
0,3
τp = 155 fs
0,6
0,2
0,4
0,1
0,2
0,0
450
300
0,4
(b)
0,0
-450
Fase (rad)
0,4
(a)
Fase (rad)
Intensidad Normalizada (u.a)
1,0
-300
-150
Tiempo (fs)
0
150
300
0,0
450
Tiempo (fs)
Figura 7. (a) Intensidad (línea continua) y fase (línea discontinua) del pulso reconstruido
a partir de la traza #2, con τp = 155 fs y b = -2E-6 fs-2. En (b) intensidad (línea continua)
y fase (línea discontinua) del pulso reconstruido a partir de la traza #3, con τp = 155 fs y
b = -2E-6 fs-2.
Los espectros numéricos también son ligeramente más anchos que los
experimentales. En este caso dos veces el marginal de frecuencia sí coincide
con el ancho de banda del fundamental, de 5 nm según el criterio de FWHM
(ver figura 8).
(a)
0,8
0,6
0,4
0,2
0,0
790
(b)
1,0
Intensidad Normalizada (u.a)
Intensidad Normalizada (u.a)
1,0
0,8
0,6
0,4
0,2
795
800
805
810
815
0,0
820
790
795
800
805
810
815
820
Longitud de Onda (nm)
Longitud de Onda (nm)
Figura 8. En (a) el espectro del láser medido experimentalmente (línea 5 nm) y
calculado por el algoritmo (círculos), para la traza #2. El producto duración del pulso por
ancho de banda es de 0.358. En (b) el espectro del láser medido experimentalmente
(línea 5 nm) y calculado por el algoritmo (círculos), para la traza #3. El producto
duración del pulso por ancho de banda es igualmente 0.358.
75
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
Al ajustar el cristal de SHG hemos conseguido que el phase-matching
sea del 100%. En cuanto al producto duración por ancho de banda, continúa
siendo el mismo de antes (0.358), lo cual es lógico si tenemos en cuenta que
no le hemos hecho ningún ajuste al láser. Como ahora no se ha medido la
autocorrelación, en la figura 9 comparamos el marginal de tiempo Mτ(τ) de la
traza experimental con la autocorrelación numérica, ligeramente más estrecha.
La duración teórica del pulso calculada a partir del marginal de tiempo es en
ambos casos de 240 fs / 1.543 = 155 fs.
1,0
Intensidad Normalizada (u.a)
Intensidad Normalizada (u.a)
1,0
(a)
0,8
τp = 155 fs
0,6
0,4
0,2
(b)
0,8
τp = 155 fs
0,6
0,4
0,2
0,0
-450
-300
-150
0
150
300
0,0
-450
450
Retardo (fs)
-300
-150
0
150
300
450
Retardo (fs)
Figura 9. (a) Time marginal de la traza experimental #2 (línea 240 fs) y
autocorrelación calculada por el algoritmo. (b) Time marginal de la traza experimental
#3 (línea 240 fs) y autocorrelación calculada por el algoritmo.
El algoritmo para SHG-FROG ha reconstruido correctamente ambas
trazas a pesar de la diferencia en el ruido que les afectaba. Además los
resultados también coinciden con los de la traza #1, en la que el phasematching era del 90%, a excepción de la medida de chirp o parámetro b. Ahora
que el phase-matching es total podemos afirmar que el sistema funciona
correctamente y que por tanto, deberíamos de estar obteniendo el valor
correcto de b.
76
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
La traza #4 fue tomada en ausencia del aislador óptico, un elemento que
evita que las reflexiones puedan desestabilizar el láser. En nuestro caso es
posible utilizar el láser sin el aislador óptico. Esto es conveniente ya que dicho
dispositivo introduce mucha dispersión a los pulsos. En la figura 10 se muestra
la traza que fue tomada sin el aislador óptico, para la cual esperamos
parámetros del pulso (∆τ y b) distintos a los que obtuvimos a partir de las trazas
#1, #2 y #3.
410
(a)
Longitud de Onda (nm)
Longitud de Onda (nm)
410
405
400
395
-450
-300
-150
0
150
300
(b)
405
400
395
-450
450
Retardo (fs)
-300
-150
0
150
300
450
Retardo (fs)
Figura 10. Traza FROG #4 medida en el laboratorio sin que los pulsos pasen por el
aislador óptico (a) y calculada por el algoritmo (b) a 805 nm.
Observamos que el algoritmo ha reconstruido sin problemas la traza
numérica, así como el pulso y el espectro del fundamental (ver fig. 11 y 12). En
la figura 11 se puede ver que b ha pasado de -2E-6 fs-2 a -7E-7 fs-2. El
parámetro que determina la cantidad de chirp se ha reducido prácticamente a
la tercera parte y en consecuencia la duración del pulso ha disminuido 10 fs
hasta situarse en 145 fs. Se puede apreciar incluso que la curvatura de la fase
dentro del FWHM del pulso ha disminuido. Decir curvatura es igual que decir
variación cuadrática de la fase, que es exactamente lo que medimos con b.
77
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
0,4
0,8
τp = 145 fs
0,3
0,6
0,2
0,4
Fase (rad)
Intensidad Normalizada (u.a)
1,0
0,1
0,2
0,0
-450
-300
-150
0
150
300
0,0
450
Tiempo (fs)
Figura 11. Intensidad (línea continua) y fase (línea discontinua) del
pulso con τp = 145 fs y b = -7E-7 fs-2.
El espectro numérico continúa siendo algo más ancho que el
experimental, aunque en este caso el marginal de tiempo coincide exactamente
con la autocorrelación numérica (ver figura 12). En cuanto al marginal de
frecuencia se comprobó que su valor fuera la mitad (2.5 nm) del ancho de
banda del fundamental (5 nm). El producto duración por ancho de banda es
ahora τp∆fp = 0.335 y se aproxima más al de un pulso sech²(t) Limitado por
Transformada de Fourier (0.315).
Intensidad Normalizada (u.a)
Intensidad Normalizada (u.a)
(b)
(a)
1,0
0,8
0,6
0,4
1,0
0,8
τp = 145 fs
0,6
0,4
0,2
0,2
0,0
0,0
790
795
800
805
810
815
-450
820
-300
-150
0
150
300
450
Retardo (fs)
Longitud de Onda (nm)
Figura 12. (a) Espectro del láser medido experimentalmente (línea 5 nm) y calculado
por el algoritmo (círculos). El producto duración del pulso por ancho de banda resulta
0.335. En (b) el time marginal de la traza FROG medida experimentalmente (línea) y la
autocorrelación calculada por el algoritmo (círculos).
78
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
Los resultados son consistentes, por lo que se puede afirmar que el
sistema FROG funciona correctamente, y que estamos obteniendo una
caracterización muy buena del módulo y la fase de los pulsos. Hemos
comprobado que cuando se cumple la condición de phase-matching podemos
confiar en la intensidad y la fase del pulso reconstruido, y también que para un
mismo ancho de banda de 5 nm obtendremos pulsos más cortos cuanto menor
sea la cantidad de chirp. En este sentido, el aislador óptico estaba aumentando
en 10 fs la duración de los pulsos. A continuación se muestran los resultados
obtenidos para la traza #1 utilizando un algoritmo distinto, en concreto para la
técnica de X-FROG.
3.2 La técnica de X-FROG
La técnica de X-FROG es una alternativa a la de SHG-FROG que
permite caracterizar dos haces de pulsos ultracortos distintos de manera
simultánea. En tal caso, el campo eléctrico asociado a dichos pulsos será E1(t)
y E2(t-τ), y estará centrado a una longitud de onda λ01 y λ02, respectivamente.
Una situación en la que X-FROG resulta especialmente útil se da cuando el
segundo armónico de alguno de los dos haces queda lejos del espectro visible.
Por ejemplo, si λ01 = 4000 nm y λ02 = 800 nm, con la técnica de SHG-FROG
deberemos trabajar de forma independiente con pulsos a 2000 nm (IR) y a 400
nm. Será especialmente complicado, tanto desde el punto de vista técnico
como práctico, trabajar con una señal en el infrarrojo. Sin embargo, si
utilizamos la técnica de X-FROG trabajaremos con una única señal, como
resultado de la suma de frecuencias de los dos haces en el cristal de SHG, a
666 nm dentro del espectro visible. Además, a partir dicha señal se
caracterizan simultáneamente los pulsos E1(t) y E2(t).
El montaje de laboratorio es el mismo que para la técnica de SHGFROG, aunque ahora los pulsos que interfieren en el cristal de SHG son dos
pulsos distintos, y el algoritmo se ha adaptado para X-FROG. En realidad
FROG es un caso particular de esta técnica, por lo que el algoritmo para X-
79
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
FROG debería de funcionar igualmente. Respecto al algoritmo de SHG-FROG
además de la traza necesitamos conocer el espectro de los dos pulsos que
queremos caracterizar.
La figura 13 muestra la traza #1 que vimos en la sección anterior, esta
vez reconstruida por el algoritmo de X-FROG. La convergencia de la traza
numérica es correcta.
410
410
(b)
Longitud de Onda (nm)
Longitud de Onda (nm)
(a)
405
400
395
-450
-300
-150
0
150
300
405
400
395
-450
450
-300
-150
Retardo (fs)
0
150
300
450
Retardo (fs)
Figura 13. Traza FROG #1 medida en el laboratorio (a) y calculada por el algoritmo
para X-FROG (b) de pulsos centrados a 805 nm.
A continuación en la figura 14 se puede ver el módulo y la fase de los
dos pulsos reconstruidos.
2
1
τp = 175 fs
0,6
0
0,4
-1
0,2
0,0
-450
Intensidad Normalizada (u.a)
0,8
-300
-150
0
150
300
(b)
1,0
0,8
τp = 125 fs
0
0,4
0,0
-450
Tiempo (fs)
1
0,6
-1
0,2
-2
450
2
Fase (rad)
(a)
Fase (rad)
Intensidad Normalizada (u.a)
1,0
-300
-150
0
150
300
-2
450
Tiempo (fs)
Figura 14. (a) Intensidad (línea continua) y fase (línea discontinua) del primer pulso
con τp = 175 fs. (b) Intensidad (línea continua) y fase (línea discontinua) del segundo
pulso con τp = 125 fs.
80
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
Los pulsos, que en principio deberían de ser idénticos, tienen anchuras
temporales distintas de 175 y 125 fs respectivamente. Además, tanto el perfil
de intensidad como la fase aparecen muy afectados por el ruido, y se hace
difícil determinar su curvatura dentro del FWHM del pulso (parámetro b). Los
espectros correspondientes son los que se muestran en la figura 15.
(a)
(b)
1,0
0,8
Intensidad Espectral
Intensidad Espectral
1,0
0,6
0,4
0,8
0,6
0,4
0,2
0,2
0,0
790
795
800
805
810
815
0,0
790
820
Longitud de Onda (nm)
795
800
805
810
815
820
Longitud de Onda (nm)
Figura 15. Espectro del láser medido en el laboratorio (línea continua) y calculado por el
algoritmo (círculos), para el primer pulso (a) y para el segundo pulso (b). Todos ellos de
5 nm según FWHM.
Es una condición del algoritmo que ambos espectros, experimental y
numérico, coincidan para cada pulso. Los resultados prueban que esta
condición se está cumpliendo.
Finalmente en la figura 16 se compara el marginal de tiempo de la traza
experimental con la correlación cruzada de los dos pulsos numéricos. En este
caso la correspondencia entre puntos es realmente buena.
81
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
Intensidad Normalizada (u.a)
1,0
0,8
0,6
0,4
0,2
0,0
-450
-300
-150
0
150
300
450
Retardo (fs)
Figura 16. Autocorrelación SHG de 240 fs medida
experimentalmente (línea) y correlación cruzada de los dos
pulsos calculada por el algoritmo (círculos).
Aparentemente el algoritmo de X-FROG ha reconstruido correctamente
la traza numérica y ha encontrado dos pulsos cuya correlación cruzada
coincide con el marginal de tiempo de la traza experimental. Sin embargo, las
duraciones de los pulsos son incorrectas y es la media entre ellas la que se
acerca más al valor real (155 fs).
La técnica de SHG-FROG es menos sensible al ruido y a posibles
errores de calibración del espectrómetro. De hecho esto es así debido a que,
como las trazas tienen que ser simétricas respecto τ, el algoritmo para SHGFROG tiende a ignorar las componentes asimétricas como el ruido. El algoritmo
para X-FROG es menos robusto frente al ruido y a errores de calibración, y
tiende a hacer los pulsos desiguales, aunque en realidad sean idénticos. No
obstante, en ausencia de ruido y con una buena calibración del espectrómetro,
los resultados deberían de ser los mismos que para SHG-FROG. En tal caso
se puede utilizar X-FROG y SHG-FROG de manera indistinta.
82
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
3.3 Conclusiones
La técnica de FROG nos ha permitido caracterizar completamente
(módulo y fase) los pulsos ultracortos a la salida del láser de Titanio-Zafiro.
Además, no ha sido necesario asumir un perfil de intensidad de los pulsos
determinado, a diferencia de lo que ocurría con la técnica de autocorrelación.
La ambigüedad temporal que aparecía como consecuencia de la
simetría de las trazas FROG resultó ser, de hecho, una ambigüedad trivial. Los
aspectos más influyentes sobre los resultados fueron aquellos relacionados con
la calibración espectral y con el phase-matching en el cristal de SHG. Sin
embargo, las cantidades como el marginal de tiempo y de frecuencia, derivadas
de la técnica del espectrograma, permitían detectar y corregir posibles
desajustes en nuestro sistema FROG. La técnica de autocorrelación también
se utilizó satisfactoriamente como herramienta para contrastar los resultados
que íbamos obteniendo. Especialmente útil fue la autocorrelación de dos
fotones para comprobar el phase-matching en el cristal de SHG.
Una prueba más de que el sistema FROG estaba funcionando
correctamente la tuvimos al capturar dos trazas simultáneamente y obtener
idénticos resultados, y al retirar un elemento dispersivo del montaje y
comprobar su efecto sobre la fase del pulso y su duración (parámetro b y τp).
En este sentido se comprobó que para un mismo ancho de banda se obtenían
pulsos más cortos cuanto menor era la cantidad de chirp.
En último lugar se realizó una prueba reconstruyendo una de las trazas
experimentales con un algoritmo para la técnica de X-FROG, y de la que FROG
es un caso particular. Los pulsos reconstruidos con dicho algoritmo, y que en
principio deberían de ser idénticos, aparecieron muy afectados por el ruido y
con duraciones distintas. Sin embargo, X-FROG puede representar, en
situaciones de bajo nivel de ruido y con una buena calibración espectral, no
sólo una técnica alternativa a SHG-FROG, sino la más indicada en aquellas
83
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
situaciones en las que la señal de segundo armónico está lejos del espectro
visible.
Llegados a este punto podemos concluir que, habiendo implementado
un sistema capaz de caracterizar completamente un pulso ultracorto arbitrario,
se ha alcanzado el objetivo de este proyecto.
3.4 Referencias
1. K. W. DeLong, R. Trebino, J. Hunter, and W. E. White, “Frequency-resolved optical
gating with the use of second-harmonic generation”, J. Opt. Soc. Am. B 11, 2206 –
2215 (1994).
2. P. Loza-Alvarez, “Ultrashort pulse characterisation techniques”, in Ultrashort pulse
generation using quasi-phasematched crystals (University of St. Andrews, North Haugh,
St. Andrews, Scotland, 2000), Chap. 3.
3. W. Koeing, H. K. Dunn, and L.Y. Lacy, “The sound spectrograph”, J. Acoust. Soc. Am.
18, 19 – 49 (1946).
4. K. W. DeLong, R. Trebino, and D. J. Kane, “Comparison of ultrashort-pulse frequencyresolved-optical-gating traces for three common beam geometries”, J. Opt. Soc. Am. B
11, 1595 – 1608 (1994).
5. R. Trebino and D. J. Kane, “Using phase retrieval to measure the intensity and phase of
ultrashort pulses: frequency-resolved optical gating”, J. Opt. Soc. Am. A 10, 1101 –
1111 (1993).
84
Capítulo 3: Frequency-Resolved Optical Gating
Caracterización de Pulsos de Luz Láser Ultracortos
CAPÍTULO 4
MEDIDA Y AUTOMATIZACIÓN
En este capítulo se describe el proceso que se siguió para automatizar la
adquisición de datos, con el fin de obtener una autocorrelación, un espectro o
una traza FROG de manera metódica, rápida y sencilla. Comenzaré
describiendo el principio de funcionamiento y características de algunos
instrumentos
que
se
utilizaron
en
los
sistemas
correspondientes.
A
continuación veremos como se conectó el PC con los instrumentos y las
distintas rutinas de control que se utilizaron en cada caso. Finalmente, se
explican los programas que permiten obtener la autocorrelación, espectro y
traza FROG de cualquier pulso ultracorto.
4.1 Instrumentos de Laboratorio
La respuesta y características de algunos de los instrumentos que se
utilizaron en el laboratorio puede ser distinta a la de otros dispositivos que en
principio realizan la misma función. Por ejemplo, la eficiencia cuántica de la
cámara CCD, en función de la longitud de onda, dependerá del modelo y tipo
de cámara, así como la respuesta del espectrómetro dependerá de la rejilla de
difracción que utilicemos. Para reproducir de nuevo los experimentos es
importante conocer las características de estos instrumentos.
En lo que sigue se describe el principio de funcionamiento y
características de la mesa traslacional, el amplificador de lock-in, el
espectrómetro y la cámara CCD.
85
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
4.1.1 La Mesa Traslacional
La mesa traslacional M-505 de PI (Physik Instrumente)1 permitía una
variación fina y automatizada de la posición del espejo móvil en el
autocorrelador, así como en el montaje de FROG (ver capítulos 2 y 3). El
sistema mesa traslacional está formado por un motor de control y por la mesa
traslacional en sí. La posición a la que nos queremos mover se indica al motor
de control mediante cuentas, en un sistema de referencia absoluto o bien
relativo a la posición actual. Cada cuenta equivale a una distancia de 16.47 nm
que a su vez es equivalente a introducir un retardo de 0.11 fs.
El principio de funcionamiento de la mesa se puede explicar a partir del
diagrama de bloques la figura 1. Los parámetros que determinan la respuesta
del sistema son la ganancia proporcional KP, la ganancia de integración KI y la
ganancia derivativa KD.2 Si los tres parámetros son distintos de cero el motor
funcionará como un controlador PID.
X(t)
e(t)
+
s(t)
Motor
Mesa
Y(t)
-
Figura 1. Diagrama de bloques del sistema equivalente a la mesa traslacional.
La variable e(t) representa el error entre posición actual de la mesa Y(t) y
la posición a la que queremos que se mueva X(t). Este error se envía al motor
de control que calcula su integral y su derivada. La señal s(t) es la responsable
del movimiento de la mesa y se relaciona con los parámetros de control KP, KI y
KD según
∞
s(t ) = K P e(t ) + K I ∫ e(t )dt + K D
−∞
86
de(t )
dt .
(4.1)
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
Una vez enviada s(t) la mesa se mueve a una nueva posición Y(t). El
error e(t) se vuelve a calcular como la diferencia entre la salida Y(t) y la entrada
X(t) y el proceso se repite.
Veamos como afectan los parámetros de control a la respuesta del
sistema. El controlador proporcional KP tiene el efecto de disminuir la
estabilidad del sistema, mejorar el tiempo de respuesta y reducir el error final
(aunque nunca lo elimina por completo). El controlador de integración KI elimina
el error final pero empeora el tiempo de respuesta. Por último el controlador
derivativo KD aumenta la estabilidad del sistema y mejora el tiempo de
respuesta.
Determinar los valores óptimos de KP, KI y KD no es nada sencillo. Existe
una fuerte dependencia entre ellos y cambiar el valor de alguno de los
parámetros también afectará a los otros dos. Además no tenemos por qué
utilizar los tres controladores a la vez si no es necesario. Por ejemplo, un
controlador PI (Proporcional – Integral) puede tener una respuesta muy buena,
en cuyo caso no es necesario un controlador diferencial. Si mantenemos el
sistema de control tan simple como sea posible, el ajuste de los parámetros
PID resultará igualmente sencillo.
La tabla 1 muestra los valores para KP, KI y KD que el fabricante
considera apropiados.
Mínimo
Propuesto
Máximo
KP
80
120
300
KI
0
20
50
KD
0
150
400
Tabla 1. Rango de valores posibles y propuestos para KP,
KI y KD según el fabricante.
Los valores que finalmente se tomaron difieren un poco de los valores
propuestos, aunque en cualquier caso están dentro del rango de valores
posibles recomendados por el fabricante. Después de algunas pruebas se
87
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
encontró que para KP = 80, KI = 50 y KD = 0 el sistema el sistema mejoraba su
tiempo de respuesta (respecto al caso KP = 120, KI = 20 y KD = 150), por lo que
la toma de muestras era más rápida. Además, se eliminaba el error final, por lo
que la mesa se posicionaba exactamente en la posición solicitada. El motor en
este caso funcionaba como un controlador Proporcional y de Integración (PI)
debido al término KD = 0. Estos valores no son necesariamente los óptimos y
no se descarta una respuesta más rápida para otros valores de KP, KI y KD.
4.1.2 El Amplificador de Lock-in
El amplificador de lock-in es el modelo SR830 de Stanford Research
Systems3 y se utilizaba junto con un chopper opto-mecánico MC1000 de la
marca Thorlabs4. El sistema de detección incluía el fotodiodo ya mencionado
trabajando en su zona de respuesta lineal (400 – 700 nm, ver capítulo 2). El
SR830 puede medir señales AC de unos pocos nanovoltios incluso en
situaciones en las que el ruido es mucho mayor que la propia señal. Vale la
pena detenerse en este punto para entender como funciona.
Imaginemos que se quiere medir una señal sinusoidal de 10 nV cuya
frecuencia es de 10 kHz. Entonces la primera etapa en detección podría ser un
buen amplificador de bajo ruido con 5 nV/√Hz de ruido a la entrada, un ancho
de banda de 100 kHz y una ganancia típica de 1000. La relación señal a ruido
(SNR) que resulta es5
SNR =
10nV × 1000
10µV
=
5nV / √ Hz × 100kHz × 1000 1.6mV
.
(4.2)
Está claro que no tendríamos mucho éxito en medir 10 µV de señal
enmascarados por 1.6 mV de ruido. Supongamos que la segunda etapa en
detección es un buen filtro paso banda con Q = 100 y centrado a 10 kHz.
Entonces el ancho de banda de ruido pasa a ser de 100 Hz (10 kHz/Q) y la
nueva SNR se calcularía como
88
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
SNR =
10nV × 1000
10µV
=
5nV / √ Hz × 100Hz × 1000 50µV
.
(4.3)
El ruido sigue siendo mucho mayor que la señal que queremos detectar.
Supongamos ahora que en vez del filtro utilizamos un detector sensible a la
fase (PSD), capaz de detectar la señal de 10 kHz en un ancho de banda de
0.01 Hz. La relación señal a ruido resultante es
SNR =
10nV × 1000
10µV
=
= 20 .
5nV / √ Hz × 0.01Hz × 1000 0.5µV
(4.4)
En este caso sí es posible realizar la medida, incluso con una buena
SNR. El amplificador de lock-in SR830 funciona igualmente con un amplificador
y un detector sensible a la fase (PSD). La tensión a la salida del PSD viene
dada por
VPSD = VS sin(ω S t + θ S ) × VL sin(ω Lt + θ L ) ,
(4.5)
donde VS(t) es la señal que queremos medir y VL(t) es la señal de lock-in.
Desarrollando la ecuación 4.5 se llega a
VPSD = 1 / 2 VS VL cos[(ω S − ω L ) t + θ S − θ L ] −
1 / 2 VS VL cos[(ω S + ω L ) t + θ S + θ L ]
,
(4.6)
de donde vemos que la tensión VPSD(t) está formada por dos señales AC, una a
la frecuencia ωS - ωL y la otra a ωS + ωL.
Si hacemos que ωL sea igual a ωS entonces tendremos una de las
señales a 2ωS, mientras que la otra será una señal de continua. Con un filtro
paso bajo apropiado la tensión a la salida del PSD será
89
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
VPSD = 1 / 2 VS VL cos(θ S − θ L ) ,
(4.7)
obteniéndose una señal proporcional a VScos(θS-θL). Para eliminar la
dependencia con la fase tan sólo en necesario añadir un segundo PSD con la
señal de lock-in desfasada 90º, en cuyo caso obtendremos una señal
proporcional a VSsin(θS-θL). La tensión medida calculada como
2
2
VM ∝ VPSD
1 + VPSD 2 ∝ VS
(4.8)
será directamente proporcional a VS, independientemente de las fases θS y θL.
En nuestro caso el SR830 construye la señal de lock-in a partir de la
señal de referencia del chopper.
Figura 2. Chopper opto-mecánico MC1000, visto de frente.
La figura 3 muestra los distintos elementos que forman el sistema de
detección. El chopper se coloca cortando el haz, de modo que la luz
únicamente pasa cuando encuentra una ranura.
90
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
Haz
Láser
Detector
SR830
Figura 3. Diagrama de bloques del sistema de detección cuando se utiliza el
amplificador de lock-in SR830.
El detector verá una señal con una frecuencia que depende de la
velocidad a la que gira el chopper y del número de ranuras de éste. Así mismo
el chopper envía una señal de referencia al amplificador de lock-in,
exactamente a la misma frecuencia, a partir de la cual se genera la señal de
lock-in. Finalmente la medida se obtiene tal y como hemos visto anteriormente.
4.1.3 El Espectrómetro
El espectrómetro utilizado en el laboratorio es el modelo MS257 de
Thermo Oriel.6 Gracias a él era posible resolver espectralmente la señal
generada en el cristal de SHG para obtener las distintas trazas FROG. La
figura 4 muestra la trayectoria que sigue la luz en su interior y nos ayuda a
comprender el principio de funcionamiento del aparato.
La rejilla de difracción dispersa el haz de entrada angularmente por lo
que en el puerto de salida tendremos las distintas componentes espectrales
distribuidas transversalmente a la dirección de propagación. Si trabajamos con
un detector a la salida será preciso tener las ranuras de entrada y salida tan
estrechas como sea posible. De este modo estaremos enventanando el
espectro de la señal de entrada. Variando la posición angular de la rejilla
seleccionaremos entre cada una de esas porciones del espectro y mediremos
su intensidad.
91
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
Puerto de
Entrada
Ranura de
Entrada
M3
M1
Rejilla de
Difracción
M2
Puerto
Axial
Ranura de
Salida
Figura 4. Interior del espectrómetro
MS257 de Thermo Oriel utilizado en el
laboratorio. M3 espejo plano, M1 y M2
espejos cóncavos.
En caso de trabajar con la cámara CCD no será necesario efectuar un
barrido
del
espectro.
Simplemente
abriremos
la
ranura
de
salida
completamente para que distintas componentes espectrales incidan sobre
distintos píxeles de la cámara CCD.
Una rejilla de difracción está compuesta por un substrato y un
recubrimiento de algún material reflectante, típicamente aluminio. La superficie
del substrato está grabada con líneas paralelas que actúan de forma
equivalente a la geometría en forma de diente de sierra de la figura 5.
Si analizamos lo que les sucede a dos rayos de cierta longitud de onda
cuando inciden en la rejilla veremos que únicamente se produce interferencia
constructiva cuando la diferencia de caminos entre los rayos difractados es un
múltiplo de la longitud de onda.7 Teniendo en cuenta la geometría del
espectrómetro es posible determinar la longitud de onda que tendremos a la
salida cuando las ranuras de entrada y salida están prácticamente cerradas.
92
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
Figura 5. Detalle de la geometría
equivalente a una rejilla de
difracción.
Cada rejilla de difracción funciona dentro de un cierto rango de
longitudes de onda. En este sentido, el blaze wavelength es el parámetro que
indica la longitud de onda para la cual la rejilla es más eficiente. La densidad de
líneas es otro parámetro característico de cada rejilla de difracción. En este
caso, la dispersión angular de una rejilla es proporcional al número de líneas
por milímetro, o densidad de líneas de la rejilla.
El espectrómetro del laboratorio dispone de cuatro rejillas de difracción
distintas para utilizar según la longitud de onda. En la tabla 2 se muestran las
características de cada una de ellas.
Rejilla
Blaze wavelength (nm)
λ (nm)
Líneas / mm
#1
350
200 – 1400
1200
#2
200
180 – 500
600
#3
2000
1100 – 5000
300
#4
4000
2500 – 12000
150
Tabla 2. Características de las rejillas de difracción según las especificaciones
del fabricante.
93
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
4.1.4 La Cámara CCD
La cámara CCD que se utilizó es el modelo 1007 de la serie S7031 de
Hamamatsu.8 Su superficie fotosensible está compuesta por un total de 1044 x
128 píxeles, tal y como muestra la figura 6. Las dimensiones del área activa
son de 24.576 mm(H) x 2.928 mm(V) y el tamaño de cada píxel de 24 x 24 µm.
128
píxeles
1044 píxeles
Figura 6. Dimensiones de la superficie sensible de la cámara CCD.
La CCD, además de ser capaz de detectar una imagen en el área activa
(1044 x 128 píxeles) de manera independiente, existe la posibilidad de utilizarla
con la opción de binning vertical. En este formato la medida que obtenemos es
el de un array (secuencia de números) de longitud 1044, y donde cada posición
representa la intensidad media de los 128 píxeles de la columna
correspondiente. En la figura 7 se puede ver un espectro de 1044 muestras
capturado con el espectrómetro, la cámara CCD y la opción de binning vertical.
Intensidad
1,0
0,5
0,0
0
200
400
600
800
1000
# píxel
Figura 7. Ejemplo de un espectro capturado con el espectrómetro y la
cámara CCD.
94
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
Probablemente la conversión de píxeles a nanómetros sea uno de los
pasos más importantes. Si suponemos que la relación entre una y otra
magnitud es lineal, entonces podemos calcular su equivalencia a partir de dos
puntos distintos de la gráfica. Si además suponemos que el valor máximo del
espectro se sitúa sobre el píxel #829 cuando movemos la rejilla de difracción
del espectrómetro a 780 nm, y sobre el píxel #285 cuando la movemos a 820
nm, entonces a partir de estos dos puntos podemos calcular el factor de
conversión para pasar de nanómetros a píxeles y viceversa como
píxeles
829 − 285 píxeles 544 píxeles
=
= 13.6
nm .
820 − 780 nm
40 nm
(4.9)
Este valor será válido para la rejilla #1 siempre y cuando estemos
trabajando alrededor de 800 nm. A otra longitud de onda la calibración puede
variar ligeramente, mientras que si cambiamos de rejilla será necesario una
nueva calibración. Formalmente necesitaríamos una lámpara espectral, por
ejemplo de mercurio, para calibrar el espectrómetro.
El rango de utilización de la cámara CCD se puede obtener a partir de la
figura 8, en la que se muestra su respuesta espectral.
Figura 8. Respuesta espectral de la cámara CCD utilizada en
el laboratorio (back-thinned).
95
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
La curva válida en nuestro caso es la que aparece marcada como backthinned. Como se ve en esta figura, su rango espectral va desde el UV (200
nm) hasta el IR (1200 nm) y su eficiencia cuántica máxima es superior al 90%.
4.2 Control de los Instrumentos
Una parte fundamental del proyecto consistió en la automatización y
control de los instrumentos desde el PC. Los programas escritos en Labview
permitían modificar cualquier parámetro de entrada al sistema así como
analizar los resultados obtenidos en la pantalla del ordenador. Para que todo
esto fuera posible se instalaron un total de tres tarjetas controladoras. La mesa
traslacional incluía su propia tarjeta a la que iba conectada. La cámara CCD se
conectó a una tarjeta de adquisición de datos DAQ Serie AT E de National
Instruments. Finalmente el osciloscopio, el amplificador de lock-in y el
espectrómetro se conectaron a una tarjeta controladora IEEE-488, mediante el
bus correspondiente, para ser controladas vía comunicación GPIB. En la figura
9 se pueden ver las conexiones entre el PC y los instrumentos.
Tarjeta
NI-DAQ
Cámara
CCD
Tarjeta
Mesa
Mesa Traslacional
Tarjeta
IEEE-488
PC
Osciloscopio
SR830
Espectrómetro
Figura 9. Conexiones entre el PC y los distintos instrumentos.
El lenguaje de programación Labview suprime el código fuente de los
programas tradicionales por elementos gráficos que representan y realizan los
distintos comandos. Es posible construir un módulo (sub-vi) a partir de
cualquier rutina y utilizarla cuando sea necesario, del mismo modo en que se
96
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
utilizan las funciones en los lenguajes de programación tradicionales. Se trata
pues de un lenguaje visual y modular, diseñado exclusivamente para controlar
instrumentos de laboratorio.
El conjunto de sub-programas que veremos a continuación realiza las
funciones básicas de mover la mesa traslacional, obtener medidas con el
osciloscopio o el amplificador de lock-in y mover la rejilla de difracción del
espectrómetro. Otros programas más complejos (ver sección 4.3) utilizarán
estas funciones cuando las necesiten, llamando al sub-vi correspondiente.
Entre las rutinas que hacen referencia a la mesa traslacional se
encuentran la de inicialización (se definen parámetros como velocidad y
aceleración), una rutina para moverla (esperando hasta que la mesa llega a la
posición ordenada) y otra que convierte la posición de la mesa, inicialmente en
cuentas, a su equivalente en fs (teniendo en cuenta el recorrido de ida y vuelta
de la luz en el autocorrelador del capítulo 2). En cuanto al osciloscopio y
amplificador de lock-in encontramos las rutinas de inicialización (sólo para el
osciloscopio) y las que permiten obtener las medidas en cada caso. Por último
veremos la rutina que mueve la rejilla de difracción del espectrómetro
(esperando hasta que ésta se sitúa en la posición ordenada).
4.2.1 Movimiento de la Mesa Traslacional
El sub-programa ini_mesa.vi es el encargado de inicializar la mesa
traslacional por lo que se ejecuta al principio de todos los programas que la
utilizan. La rutina está basada en un programa de inicialización que facilita el
fabricante de la mesa, aunque con algunas modificaciones como la del bloque
que inicializa IL (Integration Limit). La estructura del sub-vi se muestra en el
diagrama de bloques de la figura 10. Con el fin de que no se pierdan datos
esperamos 100 ms entre comando y comando, aunque por simplicidad no
aparece en el diagrama.
97
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
PCI INIT
BOARD
PCI
PID
PCI AUTO
DETECT
SET OUTPUT
MOTOR ON
SET MOTOR
MODE
IL = 2000
Figura 10. Estructura del sub-programa ini_mesa.vi.
Los dos primeros módulos se encargan de inicializar la tarjeta y de
establecer la comunicación con la mesa. Los dos siguientes encienden el motor
y seleccionan el modo de funcionamiento. PCI PID asigna los valores de la
ganancia proporcional KP, la ganancia de integración KI y la ganancia derivativa
KD, así como de la velocidad y la aceleración de la mesa. Por último el
parámetro IL (Integration Limit) se inicializa con el valor 2000 tal y como
especifica el fabricante. Este último paso es muy importante para que la mesa
se sitúe exactamente en la posición solicitada.
Para asegurar que la toma de datos se realiza de forma correcta es
necesario que cada medida se tome una vez que la mesa traslacional ha
llegado a la posición correspondiente y no antes. El sub-programa
movA_sinc.vi es el encargado de que esto suceda, sincronizando el
movimiento de la mesa con la captura de datos. La implementación que diseñé
utiliza dos librerías de bajo nivel facilitadas por el fabricante, una para conocer
la posición actual de la mesa (PCI POS?) y la otra que espera hasta que la
mesa finaliza un movimiento (PCI WAIT STOP). La posición a la que nos
queremos mover se indica de forma absoluta respecto al origen, mientras que
el origen es la posición en la que se encuentra la mesa cuando la inicializamos.
El sub-vi no termina hasta que la mesa se sitúa en la posición ordenada, por lo
que la medida posterior se toma para el retardo que le corresponde (ver
capítulo 2). En la figura 11 podemos ver el diagrama de bloques del sub-vi.
98
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
SALIR
Y=X
X
Y≠X
PCI
POSICIÓN?
Y
MOV ABS
X
PCI WAIT
STOP
Figura 11. Diagrama de bloques del sub-programa movA_sinc.vi.
La posición solicitada X se pasa como parámetro al programa. El primer
paso es solicitar a la mesa su posición actual Y. Si ésta coincide con la posición
solicitada X el programa finaliza puesto que ya nos encontramos en la posición
que queremos. En caso contrario se le indica a la mesa que se mueva a la
posición X y esperamos a que el sensor de movimiento indique que la mesa se
ha detenido. Entonces solicitamos de nuevo la posición actual y la volvemos a
comparar con la posición deseada. El proceso continúa hasta que la mesa se
posiciona correctamente, es decir, X = Y. Normalmente son necesarias dos o
tres iteraciones, aunque si los parámetros del controlador PID no son los
adecuados, incluido el parámetro Integration Limit, la mesa no llegará nunca a
la posición X y el programa quedará en un bucle cerrado.
Finalmente implementé un sub-vi para convertir las dimensiones de X,
inicialmente en cuentas, a su equivalente en tiempo teniendo en cuenta la
velocidad de propagación de la luz, y que la mesa controla la posición del
espejo móvil de un interferómetro como el descrito en el capítulo 2. En la figura
12 se muestra el sub-programa cuentas_fs.vi encargado de realizar tal función.
CUENTAS
×
×
÷
÷
16.47nm
2
3E 8
1E15
FS
Figura 12. Diagrama de bloques del sub-programa cuentas_fs.vi.
99
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
La única entrada del sub-vi es el incremento de la mesa traslacional en
cuentas. El primer bloque realiza la conversión a metros mientras que el
segundo tiene en cuenta que la luz recorre dos veces esa distancia. El
siguiente bloque encuentra su equivalente en tiempo y el último lo convierte a
unidades de fs. Para simplificar el diagrama de bloques de los programas que
veremos a continuación, el módulo cuentas_fs.vi no aparece implícitamente,
aunque en realidad se utiliza en la mayoría de ellos.
4.2.2 Medidas con el Osciloscopio
El osciloscopio con el que se trabajó en el laboratorio (Tektronix TDS
3032B)9 se utilizaba junto con un fotodiodo para ver autocorrelaciones en
tiempo real y también para obtener trazas FROG. Gracias al sub-programa
movA_sinc.vi (ver sección anterior), cuya función es mover la mesa traslacional
y esperar hasta que esta llegue a la posición indicada, ya no tenemos que
preocuparnos por el sincronismo entre la toma de datos y el movimiento de la
mesa. El sub-vi que diseñé, cuya función es obtener una medida de tensión del
osciloscopio, se limita prácticamente a enviar una orden solicitando la medida,
y a leer la respuesta con la medida correspondiente del búfer del osciloscopio.
Para la inicialización del osciloscopio implementé el sub-programa ini_osc.vi, el
cual se limita a especificar que deseamos tomar medidas de tensión. El
diagrama de bloques del sub-vi de inicialización se muestra a continuación en
la figura 13.
GPIB
ADDRESS
SEND
measu:imm:type mean
Figura 13. Diagrama de bloques del sub-programa ini_osc.vi.
El bloque SEND envía un comando al osciloscopio especificando que
deseamos tomar medidas de la tensión media. A partir de entonces llamaremos
100
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
al sub-programa medida_osc.vi para obtener cada una de las medidas. En la
figura 14 se muestra el diagrama de bloques correspondiente.
GPIB
ADDRESS
SEND
measu:imm:value?
RECEIVE
V(t)
Figura 14. Diagrama de bloques del sub-programa medida_osc.vi.
En este caso el bloque SEND envía un comando al osciloscopio
solicitando una medida del tipo especificado en la inicialización. El bloque
RECEIVE espera hasta que la medida está disponible.
4.2.3 Medidas con el Amplificador de Lock-in
Las medidas con el amplificador de lock-in (SR830) son tan sencillas
como con el osciloscopio. Tan sólo es necesario tener el chopper funcionando
y asegurarse de que la ganancia y la fase de la señal de lock-in sean las
adecuadas. Para ello el SR830 cuenta con un procedimiento automático para
detectar la frecuencia de lock-in a partir de la señal que el chopper le envía
(auto-phase), y ajustar la ganancia según el nivel de la señal de entrada (autogain). Cada vez que queramos obtener una medida ejecutaremos el subprograma medida_SR830.vi cuyo diagrama de bloques es el de la figura 15.
GPIB
ADDRESS
SEND
OUTR?1
RECEIVE
V(t)
Figura 15. Diagrama de bloques del sub-programa medida_SR830.vi.
Se puede ver que el programa que escribí es bastante sencillo. El único
parámetro de entrada es la dirección del amplificador de lock-in en el bus.
Enviando el comando OUTR?1 solicitamos la tensión del canal 1, que es al que
se conecta el fotodetector. El módulo RECEIVE espera hasta que el
101
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
amplificador envía la respuesta, garantizando así el sincronismo. La salida del
sub-vi es la tensión o medida solicitada.
4.2.4 Control del Espectrómetro
Para capturar espectros correctamente cuando no utilizamos la cámara
CCD es necesario mantener el sincronismo entre el movimiento de la rejilla de
difracción y las medidas. En este caso gw_sinc.vi (Go Wavelength síncrono) es
el encargado de esperar a que la rejilla llegue a la posición solicitada para
tomar la medida correspondiente. Para implementar esta rutina utilicé dos
librerías (suministradas por el fabricante) que permitían mover la rejilla de
difracción y conocer su posición actual. El diagrama de bloques del subprograma es parecido al de movA_sinc.vi que controla los movimientos de la
mesa traslacional.
SALIR
Y=X
X
POSICIÓN?
Y
Y≠X
GW
X
Figura 16. Diagrama de bloques del sub-programa gw_sinc.vi.
La longitud de onda X es uno de los dos parámetros de entrada junto
con la dirección GPIB del espectrómetro. La secuencia básica consiste en
comparar la posición actual de la rejilla de difracción, con la posición solicitada.
En caso de que no coincidan se envía el comando GW X para que la rejilla se
mueva a la posición X, mientras que si son iguales el programa termina. Existe
una resolución máxima (mínimo incremento) para especificar la longitud de
onda de 0.1 nm, es decir, el programa permite mover la rejilla de difracción en
102
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
décimas de nanómetro. Aunque en realidad la resolución del aparato es mayor
a la décima de nanómetro, no llega a la centésima, por lo que no es posible
añadir un segundo decimal para especificar la longitud de onda.
Un dato interesante cuando se programa el espectrómetro es que todas
las respuestas finalizan con el carácter >, por lo que la rutina para leer del
buffer correspondiente debería tenerlo en cuenta.
En nuestro caso se utilizó un módulo RECEIVE de bajo nivel que leía
hasta encontrar el carácter 62, correspondiente al código ASCII de >, y hasta
un máximo de 256 caracteres. Posteriormente se eliminaba el carácter > del
string (secuencia de caracteres) recibido para convertirlo a formato numérico.
Otro dato
igualmente interesante es que cuando se enciende el
espectrómetro, éste también responde con un carácter >. Si queremos que los
comandos enviados se correspondan con las respuestas recibidas será
necesario leer ese primer carácter cada vez que encendamos el aparato.
4.3 Captura de Datos
La implementación de funciones complejas, como por ejemplo capturar
una autocorrelación, precisa del control simultáneo de más de un instrumento
de forma ordenada y perfectamente sincronizada. Los programas que veremos
a continuación realizan funciones complejas, a partir de sub-programas de
control más sencillos (ver sección 4.2), para obtener autocorrelaciones,
espectros o trazas FROG de forma totalmente automatizada. En el lado
opuesto se encontraría el control manual de los instrumentos y adquisición
también manual de las medidas. Es fácil tener una idea del tiempo y trabajo
que emplearíamos en obtener una autocorrelación de cien muestras, moviendo
la mesa a mano y anotando la medida correspondiente en una hoja, hasta un
total de cien veces. Capturar alguna de las trazas FROG que vimos en el
103
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
capítulo 3 (de dimensiones 60 x 100 = 6000 muestras) mediante este
procedimiento resulta impensable.
A continuación se describen cuatro programas que realizan las funciones
de obtener una autocorrelación, obtener un espectro, obtener una traza FROG
y obtener una traza FROG utilizando la cámara CCD.
4.3.1 Obtener una Autocorrelación
El programa autoco.vi permite obtener la autocorrelación de los pulsos
del láser de Ti:Zafiro (ver cap. 1) a partir de los sub-programas que controlan la
mesa traslacional, el osciloscopio y el amplificador de lock-in. En lo que sigue
se describe el programa que diseñé y escribí prácticamente en su totalidad, a
excepción del sub-vi que controla la mesa traslacional y que utiliza varias
librerías facilitadas por el fabricante. En el panel frontal podemos modificar los
parámetros de entrada al sistema.
Figura 17. Panel frontal del programa autoco.vi.
104
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
La siguiente tabla muestra cuales son los valores de entrada por defecto.
SV
180000
SA
400
Axis
2
osc address
10
KP
80
sr830 address
8
KI
50
N
100
KD
0
incremento
91
Tabla 3. Valor por defecto de los parámetros de entrada del programa autoco.vi.
Es posible especificar la velocidad de la mesa traslacional SV (Set
Velocity), el canal de la tarjeta controladora al que está conectada (Axis), los
tres parámetros PID del motor de control y su aceleración SA (Set
Acceleration). Otros parámetros de entrada son la dirección en el bus del
osciloscopio y del amplificador de lock-in, y los de mayor interés, el número de
muestras total de la autocorrelación N y el incremento entre muestras dado en
cuentas. En la figura 18 se muestra el diagrama de bloques del programa
principal.
En primer lugar se inicializan la mesa traslacional y el osciloscopio
llamando al sub-vi correspondiente. Como la llamada a los dos sub-programas
de inicialización no se realiza de forma secuencial, en el diagrama aparecen los
dos bloques en paralelo. A continuación se repite la secuencia mover mesa y
tomar medida N veces. Las medidas se pueden tomar con el osciloscopio o
bien con el amplificador de lock-in (SR830). Cuando el programa termina se
encarga de dibujar la autocorrelación y de regresar la mesa a la posición de
retardo cero, es decir, la correspondiente al valor máximo de la autocorrelación
(por simplicidad no aparece en el diagrama de bloques). Esta característica se
puede aprovechar para encontrar la posición de retardo cero cuando la mesa
está totalmente descentrada, siempre y cuando los parámetros N e incremento
sean adecuados. Algunos datos de interés que podemos ver en el panel frontal
cuando la rutina termina son la duración del pulso τp, para pulsos gaussianos o
sech²(t) y el equivalente en fs del incremento en cuentas.
105
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
ini_mesa.vi
ini_osc.vi
i=0
movA_sinc.vi
(-N/2+i)*inc
medida_osc.vi
i = i +1
medida_SR830.vi
mientras
i<N
Figura 18. Funcionamiento básico del programa autoco.vi. La secuencia mover
mesa y tomar medida se repite N veces.
4.3.2 Obtener un Espectro
El programa espectro.vi permite medir el espectro de la señal de
entrada, efectuando un barrido de la rejilla de difracción del espectrómetro, a la
vez que el osciloscopio o el amplificador de lock-in toma medidas de la
intensidad a su salida. El programa, que inicialmente escribí con el objetivo de
resolver las autocorrelaciones en frecuencia y obtener la correspondiente traza
FROG, también se puede emplear para capturar simplemente un espectro. A
continuación se puede ver el panel frontal del programa espectro.vi.
106
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
Figura 19. Panel frontal del programa espectro.vi.
En la figura 20 se muestra el diagrama de bloques básico del programa.
ini_osc.vi
i=0
gw_sinc.vi
λ0+(-N/2+i)*inc
medida_osc.vi
medida_SR830.vi
i = i +1
mientras
i<N
Figura 20. Diagrama de bloques del programa espectro.vi.
107
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
En primer lugar se inicializa el osciloscopio. Entonces se repite la
secuencia mover rejilla de difracción y tomar medida N veces. Cuando el
programa termina obtenemos un espectro formado por N muestras alrededor
de la longitud de onda central λ0 con una separación de inc (en nm) entre
muestra y muestra. El valor por defecto de N es 60 y el incremento de 0.3 nm.
Al igual que con el programa autoco.vi es posible decidir entre tomar las
medidas con el osciloscopio o con el amplificador de lock-in. Algunos datos de
interés que podemos ver en el panel frontal son la posición de la rejilla de
difracción, el valor actual de la medida correspondiente y, una vez que finaliza
el programa, la longitud de onda para la que el espectro es máximo.
4.3.3 Obtener una Traza FROG
El programa FROG.vi utiliza los dos programas anteriores, autoco.vi y
espectro.vi, para medir el espectro de la señal Esig(t,τ) para cada valor del
retardo τ. De este modo se obtiene IFROG(λ,τ) o traza FROG correspondiente. El
programa también lo diseñé y escribí íntegramente, con la excepción de
algunas librerías que se utilizan para controlar la mesa traslacional.
En la figura 21 se puede ver el panel frontal del programa FROG.vi.
Figura 21. Panel frontal del programa FROG.vi.
108
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
A continuación se muestra el diagrama de bloques del programa
principal.
ini_mesa.vi
ini_osc.vi
i=0
movA_sinc.vi
(-N1/2+i)*inc1
i=i+1
espectro.vi
N2 inc2
mientras
i < N1
Figura 22. Diagrama de bloques del programa FROG.vi.
En primer lugar se inicializan la mesa traslacional y el osciloscopio. A
continuación se repite la secuencia mover mesa y capturar espectro un total de
N1 veces. Aunque el programa autoco.vi no aparece como bloque, su
estructura sí forma parte de FROG.vi. La tabla 4 muestra los parámetros de
entrada por defecto.
osc
10
N1
100
8
Inc1
91
6
N2
60
50
Inc2
0.3
KD
0
λ0
400
SA
400
SV
180000
Axis
2
KP
80
KI
address
sr830
address
espec
address
Tabla 4. Valores de entrada por defecto del programa FROG.vi.
109
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
En la primera columna aparecen los parámetros que hacen referencia a
la mesa traslacional. En la segunda están la direcciones GPIB del osciloscopio,
el amplificador de lock-in y el espectrómetro. Finalmente a la derecha se
encuentran los parámetros más relevantes del sistema. Inc1 y N1 hacen
referencia al eje del retardo de la traza FROG, donde el primero es la
separación entre muestras y el segundo el número total de muestras. Sus
equivalentes en el eje de la frecuencia o longitud de onda son Inc2 y N2, y λ0
para especificar la longitud de onda central del pulso. Podemos calcular el
número total de muestras que se requieren simplemente haciendo el producto
de N1 por N2. Cuando el proceso termina el programa guarda la matriz de datos
resultante en el archivo frogtrace.dat, a la espera de aplicar el algoritmo. Al
igual que con los programas anteriores en el panel frontal aparece la
información en tiempo real del número de medida y del voltaje correspondiente.
También podemos elegir entre tomar las medidas con el osciloscopio o con el
amplificador de lock-in.
La segunda versión que se hizo de FROG.vi funciona igualmente con el
espectrómetro, pero utiliza la cámara CCD en vez del fotodiodo. El programa
se llama FROG_CCD.vi y es parecido al anterior, aunque ahora se obtienen las
medidas a partir de la rutina que controla la cámara y que facilita el fabricante.
Por este motivo, es necesario que dicha rutina esté funcionando en el momento
de capturar una traza FROG. El aspecto de FROG_CCD.vi (panel frontal) es el
que podemos ver a continuación en la figura 23.
En este caso veremos una gráfica de la intensidad por píxel para cada
una de las N iteraciones del bucle principal, resultando un total de 1044
muestras por iteración actualizadas en tiempo real.
110
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
Figura 23. Panel frontal del programa FROG_CCD.vi.
La figura 24 muestra el diagrama de bloques básico del programa
FROG_CCD.vi.
ini_mesa.vi
i=0
movA_sinc.vi
(-N/2+i)*inc
i=i+1
intensidad_CCD.vi
mientras
i<N
Figura 24. Diagrama
FROG_CCD.vi.
111
de
bloques
del
programa
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
En primer lugar se inicializa la mesa traslacional llamando al sub-vi
correspondiente. Luego se repite la secuencia mover mesa y leer intensidad de
la cámara un total de N veces. Lo que hace el módulo intensidad_CCD.vi es
leer de una variable global un array (secuencia de números) con la intensidad
de la cámara y guardarlo en el archivo frogtrace.dat. El programa que controla
la cámara actualiza continuamente esta variable, además de eliminar el ruido
de fondo. Cuando FROG_CCD.vi termina el archivo de datos contiene una
traza de N x 1044.
Al igual que antes en el panel frontal se pueden modificar los parámetros
que hacen referencia a la mesa traslacional y al eje del retardo, mientras que
han desaparecido aquellos relacionados con el osciloscopio, el amplificador de
lock-in y el espectrómetro. Este último ya no tiene que realizar un barrido y tan
sólo es necesario que la rejilla de difracción esté centrada a la longitud de onda
λ0. El valor por defecto de N es de 100 iteraciones y el de inc de 91 cuentas,
equivalente a 10 fs teniendo en cuenta el camino de ida y vuelta de la luz.
4.4 Conclusiones
En este capítulo hemos visto el proceso de automatización que se siguió
para la adquisición de autocorrelaciones, espectros y trazas FROG. Se
comenzó describiendo el principio de funcionamiento y características de
algunos de los instrumentos que se utilizaron en el laboratorio. En primer lugar
la mesa traslacional y la importancia de los parámetros PID que definen su
comportamiento. Después el amplificador de lock-in (SR830) y como es capaz
de obtener medidas de tensión AC de unos pocos nanovoltios. También vimos
el funcionamiento del espectrómetro, las características de sus cuatro rejillas
de difracción y por último, la cámara CCD y el método para calibrar los píxeles
con las distintas longitudes de onda.
En la siguiente sección (4.2) se mostraron las conexiones entre el PC y
los
distintos
instrumentos,
mediante
112
las
correspondientes
tarjetas
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
controladoras. Vimos también las rutinas que implementé para controlar los
distintos instrumentos. En primer lugar las que hacían referencia a la mesa
traslacional, una para su inicialización y otra para moverla manteniendo el
sincronismo entre su posición y las medidas. Después las que permitían
obtener medidas con el osciloscopio y el SR830 y por último, la rutina que
controlaba el movimiento de la rejilla de difracción del espectrómetro.
Finalmente se explicaron los programas (diagrama y panel frontal) que
realizaban funciones más complejas como obtener una autocorrelación, un
espectro o una traza FROG de forma automática. Vimos que el programa para
obtener autocorrelaciones se podía utilizar además para encontrar la posición
de retardo cero del autocorrelador. Entonces se describió el programa para
obtener espectros y su aplicación en la primera implementación de FROG. Por
último vimos las dos implementaciones para obtener una traza FROG, la
segunda de ellas utilizando la cámara CCD.
Con estas rutinas será posible la caracterización completa de cualquier
pulso ultracorto, de una manera metódica, sistemática, rápida y sencilla.
4.5 Referencias
1. Physik Instrumente (PI), M-505 in MicroPositioning, www.physikinstrumente.de
2. Control tutorials for Matlab: PID tutorial (University of Michigan, Michigan, Ohio),
http://rclsgi.eng.ohio-state.edu/matlab/PID/PID.html
3. Standford Research Systems, Inc., www.srsys.com/products/SR810830.htm
4. Thor Labs, Inc.,
www.thorlabs.com
Laser
Lab
Instrumentation,
in
Electronic
Instruments,
5. Standford Research Sys., Inc., www.srsys.com/downloads/PDFs/Manuals/SR830m.pdf
6. Spectra-Physics Thermo Oriel, monochromators in featured products, www.oriel.com
7. E. Hecht, Optics (Addison – Wesley Pub. Co., 3rd ed. 1997), Chap. 10.
8. Hamamatsu Photonics K. K., S7030/S7031 series, in CCD area image sensor (2003),
http://usa.hamamatsu.com/hcpdf/parts_S/S7030_series.pdf
9. Tektronix, Inc., TDS3000B
www.tektronix.com
Series,
113
in
real-time
(DFO/DSO)
oscilloscopes,
Capítulo 4: Medida y Automatización
Caracterización de Pulsos de Luz Láser Ultracortos
CAPÍTULO 5
CONCLUSIONES Y TRABAJO FUTURO
En este capítulo se hace un breve repaso de las conclusiones a las que
se llegó en los cuatro capítulos anteriores. Después de este repaso veremos en
que dirección continúa actualmente el trabajo emprendido con este proyecto,
en el ámbito de la microscopía no lineal, y por último hablaré de algunos
aspectos que considero importantes y sobre los que se podría continuar
investigando.
5.1 Conclusiones
Si tuviera que destacar alguna de las conclusiones alcanzadas en los
capítulos anteriores, sin duda alguna destacaría aquella a la que se llegó en el
capítulo 3 con el sistema FROG funcionando: habiendo caracterizado
perfectamente los pulsos (módulo y fase) se había cumplido el objetivo del
proyecto.
El primer capítulo sirvió para introducir los pulsos ultracortos, viendo sus
posibles aplicaciones, características y método de generación. En este sentido,
el cristal de Titanio:Zafiro es un medio activo excelente debido a su gran ancho
de banda de emisión. Finalmente se compró que la potencia y la longitud de
onda de emisión del láser coincidieran con las especificadas por el fabricante,
obteniendo un resultado satisfactorio.
En el segundo capítulo obtuvimos, con la técnica de autocorrelación, las
primeras estimaciones acerca de la duración de los pulsos a la salida del láser.
114
Capítulo 5: Conclusiones y Trabajo Futuro
Caracterización de Pulsos de Luz Láser Ultracortos
Sin embargo, el principal problema resultó ser la falta de información
cuantitativa referente al perfil de intensidad y a la fase de dichos pulsos. Se
comenzó viendo la geometría del autocorrelador colineal y los dos tipos de
autocorrelación que podíamos tener, de intensidad e interferométrica, en
función de si el detector resolvía las franjas de interferencia de la señal de
autocorrelación. También se utilizó indistintamente la respuesta cuadrática de
un cristal de SHG (BBO) y el comportamiento de absorción de dos fotones de
un fotodiodo de GaAsP. En cuanto a los resultados obtenidos a partir de dos
tipos de autocorrelación posibles, comprobamos que eran perfectamente
complementarios: la autocorrelación de intensidad permitía estimar con
fiabilidad la duración de los pulsos, mientras que a partir de la interferométrica
se podía detectar la presencia de chirp. El último paso consistió en modificar el
autocorrelador para obtener una geometría no colineal, en la que desaparecía
la componente de background, y en introducir una mesa traslacional
micrométrica controlada por el ordenador, con el fin de tener un control más
preciso sobre el retardo (variable τ).
Ya en el capítulo 3 se comprobó que la técnica de FROG permitía
caracterizar tanto el módulo como la fase de los pulsos, independientemente
del perfil de intensidad de estos. Se prestó especial atención en la calibración
del espectrómetro y el phase-matching en el cristal de SHG. Además los
marginales de tiempo y frecuencia, así como la autocorrelación de intensidad
de dos fotones, sirvieron para comprobar en cada momento los resultados que
íbamos
obteniendo.
Un
indicio
más
de
que
el
sistema
funcionaba
correctamente lo obtuvimos al retirar un elemento dispersivo del montaje y
comprobar su efecto sobre la fase del pulso. Efectivamente, al retirar dicho
elemento dispersivo disminuía la curvatura de la fase (chirp), con lo que la
caracterización de los pulsos se había hecho de manera adecuada. Finalmente
realizamos una prueba con un algoritmo distinto, concretamente para la técnica
de X-FROG. Se encontró que esta técnica es altamente sensible a la
calibración y al ruido en los datos experimentales. Además, el algoritmo
entrega inherentemente dos pulsos distintos, por lo que su utilización en lugar
de FROG debe ser hecha más cuidadosamente.
115
Capítulo 5: Conclusiones y Trabajo Futuro
Caracterización de Pulsos de Luz Láser Ultracortos
En el último capítulo vimos los programas que implementé para obtener
las medidas experimentales de forma automática, controlando cualquier
parámetro desde el PC. Podría destacar la importancia de los parámetros PID
en el momento de inicializar la mesa traslacional micrométrica, y de la correcta
calibración de la cámara CCD y del espectrómetro. El programa para obtener
autocorrelaciones, así como los dos que permitían obtener trazas FROG,
funcionaban correctamente: el objetivo de caracterizar los pulsos de forma
rápida, sencilla y automatizada también se había alcanzado. Con las técnicas y
los programas desarrollados es posible entonces hacer una completa
caracterización de los pulsos ultracortos de cualquier láser de Ti:Zafiro de una
manera fiable y sistemática.
5.2 Trabajo Futuro
El trabajo realizado representa una herramienta fundamental
en
cualquier laboratorio de pulsos ultracortos. De hecho, los autocorreladores y
programas que desarrollé han sido utilizados de manera exitosa en el campo
de la microscopía no lineal. Por ejemplo, durante la preparación de este trabajo
se han utilizado los programas aquí desarrollados y, mediante una variación del
montaje de FROG para hacerlo colineal (CFROG), se ha procedido a
caracterizar los pulsos que llegan a una muestra después de haber pasado por
un objetivo de microscopio.1,2 Con esta geometría, notablemente más sencilla
que la no-colineal, se procesan los datos experimentales para seleccionar
únicamente la contribución correspondiente a la interacción entre los pulsos, y
que contiene la información útil. El resultado es una traza FROG como la que
se obtendría con una geometría no-colineal y a la cual se aplica el mismo
algoritmo descrito en este proyecto para obtener el módulo y la fase de los
pulsos. El hecho de tener un sistema robusto para la caracterización de pulsos
ultracortos ha permitido el estudio de bio-materiales para ser aplicados en
óptica no lineal. Así, se ha comprobado que una solución de almidón puede
sustituir al habitual cristal no lineal, para generar la señal de segundo armónico
en dicho sistema FROG. Las ventajas que ofrece este medio no lineal son
116
Capítulo 5: Conclusiones y Trabajo Futuro
Caracterización de Pulsos de Luz Láser Ultracortos
muchas: se trata de un material fácil de obtener, de almacenar y manipular, no
tóxico, barato, con un alto coeficiente no lineal que es independiente de la
polarización y del ángulo de incidencia de la luz, y con un ancho de banda que
va de 700 a 1300 nm. La solución de almidón se sitúa exactamente en el
mismo lugar donde colocaríamos la muestra de estudio, utilizando igualmente
un portaobjetos y un cubreobjetos, y permitiéndonos la caracterización de los
pulsos tal y como realmente llegan a la muestra.
Por otra parte, hay algunos aspectos relacionados con el proyecto sobre
los que considero que se podría seguir investigando. Por ejemplo, se puede
trabajar en algoritmos más robustos tanto para FROG como para X-FROG. En
el primer caso se puede añadir la condición relacionada con el espectro de los
pulsos, y que ya se utiliza para X-FROG. Además, en ambos casos, el
conocimiento previo de la forma de los pulsos puede servir para añadir una
condición adicional extra, que permita aumentar la robustez del algoritmo o
bien, capturar menos datos experimentales hacia un sistema más cercano a
trabajar en tiempo real. En este mismo sentido sería interesante realizar una
nueva búsqueda de los parámetros PID óptimos, parámetros que determinan el
tiempo de respuesta de la mesa traslacional, con el fin de reducir el tiempo
necesario para capturar una traza FROG.
Otro aspecto a tener en cuenta tiene que ver con la portabilidad del
sistema de medida de pulsos ultracortos. Sería interesante disponer de un
montaje para FROG móvil y con algún tipo de mecanismo que permitiera una
alineación rápida y sencilla del sistema respecto al haz de entrada, en cuyo
caso el montaje CFROG parece ser el más indicado. Finalmente, el
funcionamiento del sistema de medida en tiempo real es otro de los puntos
importantes y además un objetivo futuro. Especialmente útil en aquellas
aplicaciones que requieren una optimización de los pulsos, y donde el tiempo
real permite realizar correcciones y ajustes monitorizando al mismo tiempo el
efecto que dichos cambios producen.
117
Capítulo 5: Conclusiones y Trabajo Futuro
Caracterización de Pulsos de Luz Láser Ultracortos
5.2 Referencias
1. I. Amat-Roldán, I. G. Cormack, P. Loza-Alvarez, and D. Artigas, “Multipurpose pulse
characterisation using a straightforward collinear FROG geometry”, submitted to CLEO,
San Francisco, 2004.
2. I. Amat-Roldán, I. G. Cormack, P. Loza-Alvarez, and D. Artigas, “Starch solutions based
SHG-FROG pulse characterisation in a nonlinear microscope”, submitted to CLEO, San
Francisco, 2004.
118
Capítulo 5: Conclusiones y Trabajo Futuro
Caracterización de Pulsos de Luz Láser Ultracortos
Apéndice – Algoritmo para SHG-FROG
%clear all
n=128;
%load parameters.
load dt;
load df128;
load lcfun;
load lcshg;
f=[-64:63]*df128;
timestep=[-64:63]*dt;
fundamental_wave=lcfun;
harmonic_wave=lcshg;
fundamental_freq=0.3/fundamental_wave;
harmonic_freq=0.3/harmonic_wave;
f_wave=0.3./(f+fundamental_freq);
h_wave=0.3./(f+harmonic_freq);
load 'shg';
load 'fun';
pump_spec=nor(abs(shg));
idlr_spec=nor(abs(fun));
% LOAD LAB DATA INTO labs HERE
%load 'labs'
%load labsnonoise.dat
%labs=labsnonoise;
ok=1
l2=sqrt(labs);
figure (1)
pcolor (labs)
shading interp
figure (2)
pcolor (abs(l2))
shading interp
% Retrieval
rand('state',1);
num_iter=100;
% Guess field and gate:
for nn=1:n
ek(nn)=exp(2.*pi*i*rand-.02*(nn-(n/2))^2);%+exp(2.*pi*i*rand-.08*(20+nn(n/2+1))^2);
119
Apéndice: Algoritmo para SHG-FROG
Caracterización de Pulsos de Luz Láser Ultracortos
end
gk=ek;
figure(3)
for ialg=1:num_iter
% Make shg-frog:
op=(conj(ek))'*gk+(conj(gk))'*ek;
op=row_rot_for(op);
op=fft(op);
op=fftshift(op);
%SHG-FROG before intensity constraint:
frogk=abs(op).*abs(op);
pcolor(frogk);
shading interp
title(strcat('Iteration number=',int2str(ialg)))
xlabel('Delay (fs)')
ylabel('Frequency (1/fs)')
pause(.01)
% Intensity constraint - NOTE using labdata not labs
op=(op./1.e-10+abs(op)).*l2;
% Reverse Fourier transform (time->freq):
op=fftshift(op);
op=ifft(op);
op=row_rot_rev(op);
% Principal Component Decomposition:
dume=ek*op;
ek=dume*op';
dumg=gk*op';
gk=dumg*op;
% dume=ek*op;%and again:
% ek=dume*op';
% dumg=gk*op';
% gk=dumg*op;
ek=conj(ek);
% gk=conj(gk);
ek=ek/max(abs(ek));
gk=gk/max(abs(gk));
end
load xt128;
120
Apéndice: Algoritmo para SHG-FROG
Caracterización de Pulsos de Luz Láser Ultracortos
load y128;
figure(3)
pcolor(xt128,y128,frogk);
shading interp
title('Retrieved FROG')
xlabel('Delay (fs)','fontsize',13)
ylabel('Frequency (fs^{-1})','fontsize',13)
save frogk.dat frogk -ascii;
absgk=abs(gk).*abs(gk);
anglegk=unwrap(angle(gk));
figure(4)
plotyy(timestep,absgk,timestep,anglegk);
title('\it Temporal intensity profile and phase of Fundamental pulses ')
xlabel('\bf Time (fs)')
ylabel('\bf Intensity (a.u.)')
absek=abs(ek).*abs(ek);
angleek=unwrap(angle(ek));
eiw=fftshift(fft(gk));
epw=fftshift(fft(ek));
abseiw=abs(eiw).*abs(eiw);
angleeiw=unwrap(angle(eiw));
absepw=abs(epw).*abs(epw);
angleepw=unwrap(angle(epw));
figure(5)
eiw=eiw/max(eiw);
plot(f_wave,idlr_spec,f_wave,abs(eiw).*abs(eiw),'o')
title('fundamental')
%Intensity Autocorrelations
% Method: Convolution of I(t) & time-reversed I(t)
%Fundamental
a=fft(absgk);
b=fft(fliplr(absgk));
gf=a.*b;
g=ifft(gf);
g=fftshift(g);
g=real(g);
121
Apéndice: Algoritmo para SHG-FROG
Caracterización de Pulsos de Luz Láser Ultracortos
g=g/max(g);
figure (6);
plot(timestep,g);
title('Fundamental Autocorrelation');
xlabel('Time (fs)');ylabel('Intensity (a.u.)');
%Saving data files
timestep=timestep';
absgk=absgk';
anglegk=anglegk';
absek=absek';
angleek=angleek';
g=g';
%save temporal profiles as:
% timestep, fun int., fun phase, shg int., shg phase
p=[timestep, absgk, anglegk, absek, angleek];
save pulses.dat p -ascii;
%save intensity correlations:
% timestep, fun, shg, xcorrelation
ac=[timestep, g];
save correlations.dat ac -ascii;
122
Apéndice: Algoritmo para SHG-FROG