Proyectos parte 3
Anuncio

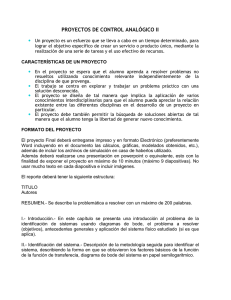
PROYECTO # 5 “CONTROL DE POSICIÓN DE UN MOTOR DE CD” Para un motor de CD controlado por armadura como el mostrado en la figura si suponemos que la corriente del campo se mantiene constante y se aplica un voltaje Va(t) al circuito de armadura, el efecto de aplicar este voltaje de entrada causará que la armadura gire. SERVOMECANISMO DEL VIDEO VISTO EN CLASES. Rm if=cte Lm + Im Va(t) + eb - - ω(t ) Jm T(t) fv θ (t) Figura.- Motor de CD controlado por armadura. Considerando los siguientes parámetros para el motor: Im Corriente de armadura (Amp) Rm Resistencia de armadura (2.X Ω) eb(t) Fuerza contraelectromotriz (Volts) T(t) Par del motor θ(t) Desplazamiento del Motor (Rad) Kt Lm Constante del Par (0.00767 N-m/Amp) Inductancia de la armadura (0.18 mH) Va(t) Voltaje aplicado en la armadura (Volts) Km Constante de la fuerza electromotriz (V/rad/seg) Km= Kt ω (t ) Velocidad angular del motor (rad/seg) φ ( t ) Flujo magnético en el entrehierro (Webers) Jm Ji Inercia del motor (3.87x10-7 Kg-m2) Inercia de la carga (2.93x10-4 Kg-m2) f Coeficiente de fricción viscosa (4x10-3 N-m-s/rad) ng Eficiencia de los engranes 0.9X nm Eficiencia del motor 0.69X ఏ (௧) ே n Relación de engranes 70 ݊ = = 70 = మ ఏಽ (௧) ேభ DONDE: X es la suma de los últimos dígitos de la matrícula cada integrante del equipo. Las ecuaciones básicas son: Del circuito eléctrico ௗூ (1) ܸ ( )ݐ− ܴ ܫ − ܮ ௗ௧ − ݁ ( = )ݐ0 Considere Lm<<Rm y simplifique la ecuación (1), considerando cero la inductancia. De la ecuación de fuerza electromotriz ݁ (ܭ = )ݐ ௗఏ ௗ௧ (2) La ecuación del par del motor ܶ (݊ = )ݐ ܭ௧ ܫ (3) Donde nm es la eficiencia del motor De la parte mecánica por la segunda ley de Newton tenemos: ݀ଶ ߠ ܶ ()ݐ = ܶ ( )ݐ− ଶ ݀ݐ ݊ ܭ Nota en la figura no se muestra el tren de engranes, pero corresponde al sistema del video del servomecanismo visto en clases. ܬ La cual puede escribirse como: ܶ ()ݐ ݀ଶ ߠ ()ݐ ( ) ܬ = ܶ ݐ − ݀ ݐଶ ݊ ܭ Aplicando la segunda ley de Newton a la carga. ௗమ ఏ (௧) Donde Beq ௗఏ (௧) ಽ = ܶ ( )ݐ− ܤ ಽ ܬ ௗ௧ మ ௗ௧ es la fricción viscosa vista en la salida (4) Combinando todas las ecuaciones anteriores se debe de encontrar la Función de transferencia siguiente: θ L ( s) Va ( s ) = (J ng nm K t K g I + ng J m K g2 ) Rm s 2 + ( Beq Rm + ng nm K m K t K g2 ) s Diseñar un controlador que satisfaga los siguientes requisitos, cuando se aplica una entrada escalón tren de pulsos de valor mínimo 0 y máximo 1, con periodo de 1 segundo: - - Máximo sobreimpulso menor de 10% Tiempo de establecimiento menor de 2 seg. Error de estado estable menor de 5% PROYECTO # 6 “SISTEMA DE POSICIÓN ACIMUTAL DE UNA ANTENA” La figura 1 muestra un sistema de control de posición acimutal de una antena, el propósito de este sistema es tener la salida del ángulo de acimut de la antena θ o y seguir el ángulo de entrada del potenciómetro θ i , el comando de entrada es un desplazamiento angular. El potenciómetro convierte este desplazamiento angular en voltaje. Del mismo modo el desplazamiento angular de salida es convertido en voltaje por el potenciómetro de la trayectoria de retroalimentación. Los amplificadores de señal y de potencia amplifican la diferencia entre los voltajes de entrada y salida. Esta señal simplificada de actuación excita la planta. El sistema operará de manera normal para llevar el error a cero. Cuando la entrada y la salida son iguales, el error será cero y el motor no girará. Por lo tanto el motor se enciende sólo cuando la salida y la entrada no son iguales, cuanto mayor sea la diferencia entre la entrada y la salida, mayor será el voltaje de entrada al motor y más rápido girará este. Fig.-1 Sistema de control de posición de una antena. Fig 2.- Diagrama esquemático y de bloques. Las especificaciones para el diseño del controlador en el dominio del tiempo son: Mediante la implementación del modelo, en SIMULINK, se pretende diseñar un controlador proporcional que cumpla las siguientes características para la salida deseada ante una entrada escalón unitario: Tiempo de estabilización < 2.3 seg Máximo sobreimpulso < 15 % Ganancias de los controladores moderadas Los parámetros del sistema se muestran en la tabla siguiente así como el diagrama de bloques (configuración 1). NOTA EL VALOR DE Ra CAMBIARLO POR: Ra=8.X Ohms DONDE: X es la suma de los últimos dígitos de la matrícula cada integrante del equipo. Fig. 3.-Diagrama de bloques del sistema REFERENCIA SISTEMAS DE CONTROL PARA INGENIERIA, NORMAN S. NISE, ED. CECSA PROYECTO # 7 “CONTROL DE VELOCIDAD DE UN MOTOR DE CD” Para un motor de CD controlado por armadura como el mostrado en la figura si suponemos que la corriente del campo se mantiene constante y se aplica un voltaje Va(t) al circuito de armadura, el efecto de aplicar este voltaje de entrada causará que la armadura gire. Ra if=cte La + ia Va(t) + eb - - ω (t ) Jm T(t) fv θ (t) Figura 1 Motor de CD controlado por armadura. Considerando los siguientes parámetros para el motor: ia Corriente de armadura (Amp) Ra Resistencia de armadura (1.X Ω) eb(t) Fuerza contraelectromotriz (Volts) T(t) Par del motor θ(t) Desplazamiento del Motor (Rad) Ka La Constante del Par (0.01 N-m/Amp) Inductancia de la armadura (0.5 Henrios) Va(t) Voltaje aplicado en la armadura (Volts) Kb Constante de la fuerza electromotriz (V/rad/seg) Kb= Ka ω (t ) Velocidad angular del motor (rad/seg) φ ( t ) Flujo magnético en el entrehierro (Webers) J Inercia del motor (0.01 Kg-m2) f Coeficiente de fricción viscosa (0.1 N-m-s/rad) DONDE: X es la suma de los últimos dígitos de la matrícula cada integrante del equipo. Demuestre que la función de transferencia es: Ka Ω( s) = Va ( s ) ( La s + Ra )( Js + f ) + K a K b Diseñar un controlador proporcional que satisfaga los siguientes requisitos, cuando se aplica una entrada escalón unitario: Máximo sobreimpulso menor de 5% Tiempo de establecimiento menor de 1.5 seg. - Error de estado estable menor de 3%