Vibraciones Longitudinales en Barras: Simulación con el
Anuncio

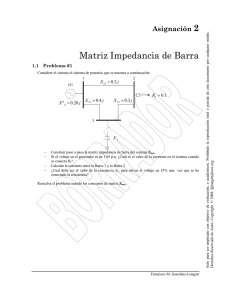
Vibraciones Longitudinales en Barras: Simulación con el Método de Redes M.T. García-Hernández(1), E. Castro(1), A. Gallego(2) (1) Dpto Física, E.P.S., Universidad de Jaén, 23071 Jaén, Spain (2) Dpto. Física Aplicada, E.U.A.T., Universidad de Granada, 18071 Granada, Spain Introducción Las vibraciones longitudinales en una barra se producen cuando una fuerza externa actúa sobre la barra de forma que cambia su longitud y volumen, sin alterar su forma. Si consideramos que no hay rozamiento, la variación de longitud en cada diferencial de volumen de la barra se propagará según la ecuación de ondas [1]. El estudio de estas vibraciones nos permite entender mejor la propagación de ondas acústicas en medios confinados, de lo que constituirían un ejemplo. Además, tienen aplicaciones prácticas como son la utilización de la frecuencia fundamental de barras circulares de diferentes longitudes para construir normas de frecuencia de tonos definidos, o el uso de la frecuencia de vibración longitudinal de un cristal piezoeléctrico para controlar la frecuencia de una corriente eléctrica o para excitar un transductor electroacústico. También tiene aplicaciones en el análisis de la respuesta de estructuras formadas por barras, o que se puedan modelar como barras con cargas másicas en los extremos, a fuerzas externas [2]. En el trabajo que aquí presentamos pretendemos estudiar, en un primer acercamiento, la propagación de ondas longitudinales en barras, utilizando para ello el método de simulación por redes. El método de simulación por redes esta basado en la obtención de un modelo en red equivalente al proceso en estudio y su posterior simulación con un programa adecuado de resolución de circuitos eléctricos. En nuestro caso se ha usado el programa PSPICE [3], con el que podemos encontrar como evolucionan los potenciales y corrientes del circuito con el tiempo, potenciales y corrientes que representan a las variables de interés para nosotros. Modelo en Red Para la obtención del modelo en red equivalente, partimos del modelo matemático que proporciona la descripción local del proceso y se elabora la celda en red elemental, es decir, la que corresponde al proceso localizado en un volumen elemental. La asociación de tales redes elementales viene a describir el proceso en cuestión en un medio finito, descripción tanto más exacta cuanto mayor sea el numero de redes elementales que se conecten [4]. En el caso de la propagación de ondas elásticas a lo largo de una barra, la ecuación que describe el proceso es la ecuación de ondas: ∂ 2ξ ∂x 2 = 1 ∂ 2ξ c 2 ∂t 2 (1) siendo ξ la elongación, x la posición, t el tiempo y c la velocidad de propagación de la onda. E-GLEA 2 El primer paso para obtener la celda en red elemental consiste en realizar la discretización espacial. Dividamos la región espacial bajo estudio en N compartimentos de espesor ∆x. Si se define la variable flujo como: j = −Y ∂ξ ∂x (2) sustituyendo en la ecuación de ondas obtenemos: ∂j ∂ 2ξ +ρ =0 ∂x ∂t 2 (3) Esta derivada será aproximada por la diferencia finita de las corrientes que circulan por la izquierda y derecha de la celda, con lo que la única derivada parcial que nos queda es con respecto al tiempo: ji −∆ − ji + ∆ − ρ∆x ∂ 2ξ ∂t 2 =0 (4) Podemos considerar esta ecuación como una relación de flujos entrantes y salientes dentro de cada compartimento, de forma que podemos rescribirla como: ji −∆ − ji + ∆ − j γi = 0 (5) con j γi = ρ∆x ∂ 2ξ ∂t 2 (6) Una vez realizada la discretización espacial, y establecidas las analogías correspondientes entre ecuaciones del sistema y ecuaciones de elementos de circuitos, el modelo en red obtenido, siempre teniendo en cuenta el obligado cumplimiento de las leyes de Kirchhoff, es el siguiente: 50 M.T. García Hernández et al E-GLEA 2 ξ i Figura 1. Modelo en red elemental Esta es la red elemental que deberá asociarse N para obtener la descripción del proceso. Obviamente, la completa equivalencia del modelo debe pasar por la incorporación de las condiciones iniciales y de contorno correspondientes a cada sistema particular. Barra Forzada-Fija Hemos implementado distintas condiciones en una barra [1]. En primer lugar simulamos una barra inicialmente en equilibrio con el extremo izquierdo sometido a una fuerza externa sinusoidal y el otro extremo fijo. Esto supone que debemos fijar la corriente del extremo izquierdo con una fuente de corriente sinusoidal y que el potencial (la elongación) del extremo derecho sea siempre cero, por lo que conectamos ese extremo a tierra. En la Figura 2 mostramos el modelo en red de esas condiciones de contorno. X=0 X=L Figura 2. Modelado de las condiciones de contorno: extremo forzado y extremo fijo M.T. García Hernández et al 51 E-GLEA 2 A continuación, presentamos los resultados obtenidos al simular la barra forzada-fija, de aluminio y de un metro de largo, en la posición x=0.5 m (centro de la barra): -7 6 ,0 x 1 0 -7 4 ,0 x 1 0 -7 2 ,0 x 1 0 -7 ξ (m) 8 ,0 x 1 0 0 ,0 - 2 ,0 x 1 0 -7 - 4 ,0 x 1 0 -7 - 6 ,0 x 1 0 -7 - 8 ,0 x 1 0 -7 0 ,0 0 ,1 0 ,2 0 ,3 0 ,4 0 ,5 t(s ) Figura 3. Resultado de la simulación en x=0.5 m al aplicar una fuerza sinusoidal de frecuencia 25 Hz -9 1,5x10 -9 1,0x10 -10 ξ (m) 5,0x10 0,0 -10 -5,0x10 -9 -1,0x10 -9 -1,5x10 0,000 0,002 0,004 t (s) 0,006 0,008 0,010 Figura 4. Resultado de la simulación en x=0.5 m al aplicar una fuerza sinusoidal de frecuencia 25000 Hz Para una frecuencia de excitación baja, de 25 Hz, se observa que ese trozo de barra vibra de forma sinusoidal con la misma frecuencia con que estamos excitando la barra, aunque si ampliamos la imagen vemos que aparecen pequeñas oscilaciones cuya frecuencia se encuentra sobre los 1300 Hz. Si repetimos la simulación con una frecuencia mucho más alta, de 25000 Hz, vemos que la vibración es ahora mucho más compleja, aunque presenta un comportamiento periódico. Al hacer 52 M.T. García Hernández et al E-GLEA 2 la transformada de Fourier de esta señal, encontramos un pico muy alto en la frecuencia de 1287 Hz, que corresponde a la frecuencia de resonancia de la barra, y una serie de picos más bajos en los siguientes armónicos, aparte de un pico que aparece en 25000 Hz. La explicación de este diferente comportamiento a alta y baja frecuencia se debe a que a 25000 Hz excitamos los distintos armónicos de la barra de una forma muy fuerte, mientras que a 25 Hz esto la excitación de esos armónicos es muy débil, de forma que solo se excita el primer armónico y con muy poca intensidad. Así, la vibración prácticamente se produce a la frecuencia a la que excitamos la barra. Hemos comprobado que las vibraciones más importantes son las producidas por la frecuencia de excitación y el primer armónico. Este hecho nos parece particularmente interesante, ya que nos permite establecer que las características de la onda dependen mucho de la frecuencia a la que excitamos la barra, de forma que las vibraciones son muy distintas. Además, como haciendo la transformada de Fourier de la señal es fácil identificar los modos de vibración que se producen, podemos conocer las frecuencias de resonancia de la barra hasta la frecuencia límite que queramos simplemente excitando la barra con esa frecuencia límite. En los dos casos lo que si se produce es una reflexión total de la onda al llegar al extremo fijo, de forma que el movimiento vibratorio en las dos frecuencias es consecuencia de la superposición de la onda incidente y de las sucesivas ondas reflejadas. 4 ,0 0 E -0 1 0 3 ,5 0 E -0 1 0 3 ,0 0 E -0 1 0 Amplitud 2 ,5 0 E -0 1 0 2 ,0 0 E -0 1 0 1 ,5 0 E -0 1 0 1 ,0 0 E -0 1 0 5 ,0 0 E -0 1 1 0 ,0 0 E + 0 0 0 0 5000 10000 15000 20000 25000 30000 F re c u e n c ia (H z ) Figura 5. Transformada de Fourier de la señal obtenida con f=25000 Hz Según lo expuesto, al excitar el extremo de la barra a la frecuencia de resonancia, la barra debería vibrar únicamente a esa frecuencia. Al realizar la simulación, encontramos que la barra vibra principalmente a la frecuencia de resonancia, pero va variando su amplitud como si hubiera también una frecuencia mucho más baja que estuviera modulando al seno, como en el fenómeno de las pulsaciones. Al realizar la transformada de Fourier encontramos que hay dos picos de casi la misma altura muy cercanos entre si en la frecuencia de resonancia, por lo que interpretamos que lo que pasa es que al llegar la vibración al extremo derecho y reflejarse, se comete un pequeño error que hace que la frecuencia de la onda de vuelta sea ligeramente distinta que la de la ida, de forma que al superponerse produzcan esa onda modulada, como ocurre con las pulsaciones. Este hecho nos ha servido para poder cuantificar el error cometido por el método, ya que hemos comprobado como disminuía la frecuencia de modulación al aumentar el número de celdas, ya que la diferencia entre la frecuencia de ida y la reflejada era menor y por tanto el error cometido en la reflexión también debía ser menor. La gráfica que mostramos es la que tiene un menor error, ya que por problemas de memoria computacional no podíamos aumentar más el número de celdas. M.T. García Hernández et al 53 E-GLEA 2 2 .0 x 1 0 -7 1 .5 x 1 0 -7 1 .0 x 1 0 -7 5 .0 x 1 0 -8 0 .0 -5 .0 x 1 0 -8 -1 .0 x 1 0 -7 -1 .5 x 1 0 -7 -2 .0 x 1 0 -7 0 .0 0 0 .0 5 0 .1 0 t (s) 0 .1 5 0 .2 0 0 .2 5 Figura 6. Resultado de la simulación en x=0.5 m al aplicar una fuerza sinusoidal de frecuencia 1287.5 Hz (Primer Armónico de la barra) ξ (m) Una ventaja importante y bonita de usar este método numérico es que podemos estudiar fácilmente el transitorio del movimiento vibratorio y no solo ver su estado estacionario, lo que nos permite ver como se genera la onda. En la Figura 7 vemos como es el transitorio que se produce en el extremo de la barra situado junto a la fuente, cuando excitamos la barra con una frecuencia de 9012.5 Hz, que corresponde al cuarto armónico de la barra. Se puede observar que la amplitud de la vibración aumenta cada cierto tiempo, y teniendo en cuenta la velocidad de la onda y la longitud de la barra, comprobamos que ese tiempo coincide con el que tarda la onda en llegar al final de la barra y volver. Si simulamos durante más tiempo comprobamos como se forma una onda similar a la de la gráfica superior, por lo que comprobamos que la forma final de la onda es el resultado de la suma de todas esas ondas reflejadas. 3 ,0 x 1 0 -9 2 ,0 x 1 0 -9 1 ,0 x 1 0 -9 0 ,0 - 1 ,0 x 1 0 -9 - 2 ,0 x 1 0 -9 - 3 ,0 x 1 0 -9 0 ,0 0 0 0 ,0 0 1 0 ,0 0 2 0 ,0 0 3 0 ,0 0 4 t (s) Figura 7. Transitorio inicial obtenido al aplicar una fuerza sinusoidal de frecuencia 9012.5 Hz (Cuarto armónico de la barra) Barra Forzada-Libre El siguiente caso que simulamos es el de una barra inicialmente en reposo con el extremo izquierdo sometido a una fuerza sinusoidal y el derecho libre, sin ninguna ligadura. Esta ultima condición de contorno se traduce en que, al no haber ligadura no se ejerce sobre el extremo 54 M.T. García Hernández et al E-GLEA 2 ninguna fuerza, por lo que la corriente en ese extremo es siempre cero, lo que conseguimos colocándole una fuente de corriente nula y una resistencia. J=0 R X=L X=0 Figura 8. Modelo en red de la barra forzada-libre Al simular la barra con estas condiciones de contorno a bajas y altas frecuencias de excitación encontramos menos diferencias que en el caso anterior (de nuevo mostramos los resultados obtenidos en el centro de la barra). En las dos frecuencias se ve que la barra vibra con la frecuencia de excitación y que el centro del seno crece de forma aproximadamente lineal, aunque a 25000 Hz la gráfica es más irregular y se puede apreciar como durante el transitorio la amplitud del seno va creciendo a saltos hasta que se estabiliza. El hecho de que en este caso el movimiento no sea tan irregular como en el caso anterior se debe a que al llegar la onda al extremo libre no se refleja. Al no reflejarse la onda no se produce la superposición de diferentes movimientos vibratorios del caso anterior y la forma de la onda se debe únicamente a la vibración de excitación y a la inercia de los elementos que forman la barra, y no a las suma de las ondas reflejadas. ξ (m) Viendo la Figura 9 con detalle se ve que la onda va creciendo de forma similar a como lo en hace la Figura 7, que mostraba el transitorio con el extremo fijo. La diferencia radica en que en el caso anterior la onda reflejada determinaba la forma final del movimiento ondulatorio, y aquí no la hay, por lo que continua creciendo indefinidamente como en el transitorio anterior. 3 ,0 x 1 0 -8 2 ,5 x 1 0 -8 2 ,0 x 1 0 -8 1 ,5 x 1 0 -8 1 ,0 x 1 0 -8 5 ,0 x 1 0 -9 0 ,0 0 ,0 0 0 0 ,0 0 2 0 ,0 0 4 0 ,0 0 6 0 ,0 0 8 0 ,0 1 0 t (s) Figura 9. Resultado de la simulación en x=0.5 m al aplicar una fuerza sinusoidal de frecuencia 25000 Hz M.T. García Hernández et al 55 E-GLEA 2 -3 1 .0 x1 0 -3 ξ(m) 1 .2 x1 0 8 .0 x1 0 -4 6 .0 x1 0 -4 4 .0 x1 0 -4 2 .0 x1 0 -4 0 .0 0 .0 0 .1 0 .2 t (s) 0 .3 0 .4 0 .5 Figura 10. Resultado de la simulación en x=0.5 m al aplicar una fuerza sinusoidal de frecuencia 25 Hz Conclusiones Hemos simulado la propagación de las ondas elásticas en la barra con las condiciones de contorno de extremo libre y extremo fijo, que son las más extremas que se pueden tener. Sin embargo, es posible imponer condiciones de contorno intermedias entre esas dos. Eso se consigue suponiendo que tenemos una carga másica en el extremo, o sea una masa puntual, de forma que el extremo no esta libre pero tampoco fijo. Si la masa vale cero es como si tuviéramos el extremo libre, sin que se aplique sobre él ninguna fuerza, y si hacemos que la masa tenga un valor infinito, el extremo estará completamente fijo y no se moverá. De esta forma vemos que las condiciones de contorno de extremo libre y extremo fijo se pueden considerar un caso particular de la condición de contorno de extremo con carga másica [5]. También es posible simular otros formas de excitación sobre la barra, no solo la sinusoidal. Podemos aplicarle pulsos con la forma que queramos, excitaciones lineales, exponenciales, constantes, etc. Así, podemos obtener la respuesta de la barra al tipo de fuerza que nos interese. También podemos fácilmente introducir la resistencia al movimiento de la barra, o sea el rozamiento, en los casos en que este sea significativo, y ampliar así el estudio del movimiento vibratorio longitudinal de la barra. Por todo esto podemos decir que el método de simulación por redes es muy adecuado para realizar análisis de ondas elásticas en barras con las condiciones que interesen, sin tener que restringirse a casos ideales. Referencias [1] Kinsler L, Frey A, Coppens A, Sanders J, “Fundamentos de Acústica” Editorial Limusa. Mexico. 1992. [2] López Pumarega M.I., Ruzzante J.E., “Acoustic Emission Signal Analysis from Steel Tubes”, Proc. “14th World Conference on Non-Destructive Testing (14th WCNDT)”, Vol. 4, pp 2493-2496, New Dehli, India (Diciembre 1996). [3] MicroSim Pspice, Version 8. Microsim Corporation. 1996. [4] Horno J., García-Hernández M. T., Gonzalez-Fernández C.F., J. Electroanal. Chem., 377 (1994) 53. [5] Nagel L.W., SPICE2: A computer program to simulate semiconductor circuits, Ph. D. Thesis, Memo. UCB/ERL M520, University of California, Berkeley, CA, 1977. 56 M.T. García Hernández et al